Báo cáo kĩ thuật đo lường và cảm biến. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
Lời nói đầu
Ngày nay, trong các hệ thống đo lường - điều khiển, mọi quá trình đều được đặc trưng bởi các biến trạng thái. Các biến trạng thái này thường là các đại lượng không điện như nhiệt độ, áp suất, lưu lượng, tốc độ, độ di chuyển v.v… Để thực hiện các quá trình đo lường và điều khiển cần phải thu thập thông tin, đo đạc, theo dõi sự biến thiên của các biến trạng thái của quá trình thực hiện chức năng trên là các thiết bị cảm biến. Cảm biến là các phần tử nhạy cảm dùng để biến đổi các đại lượng đo lường, kiểm tra hay điều khiển từ dạng này sang dạng khác thuận tiện hơn cho việc tác động của các phần tử khác. Cảm biến là một thiết bị chịu tác động của đại lượng cần đo m không có tính chất điện và cho một đặc trưng mang bản chất điện (như điện tích, điện áp, dòng điện, trở kháng) . Cảm biến thường dùng ở khâu đo lường và kiểm tra. Các loại cảm biến được sử dụng rộng rãi trong tự động hóa các quá trình sản xuất và điều khiển tự động các hệ thống khác nhau. Chúng có chức năng biến đổi sự thay đổi liên tục các đại lượng đầu vào (đại lượng đo lường - kiểm tra, là các đại lượng không điện nào đó thành sự thay đổi của các đại lượng đầu ra là đại lượng điện, ví dụ: điện trở, điện dung, điện kháng, dòng điện, tần số, điện áp rơi, góc pha,..
Báo cáo kĩ thuật đo lường và cảm biến. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
Tài liệu gồm 35 trang giúp bạn tham khảo, củng cố kiến thức và ôn tập đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Cơ học Kỹ thuật (UET) 10 tài liệu
Trường: Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội 823 tài liệu
Tác giả:












Preview text:
lOMoAR cPSD| 59735516
KĨ THUẬT ĐO LƯỜNG VÀ CẢM BIẾN BÀI BÁO CÁO
GIỚI THIỆU CẢM BIẾN SIÊU ÂM HY SRF05
• Thành viên nhóm
Nguyễn Mạnh Cường-20021097
Trương Minh Đức-20021118
Vũ Đức Chiến-20021092
Nguyễn Văn Thám-20021182
Đào nguyễn Hải Linh-20021151
• Giảng viên hướng dẫn
TS. Đinh Trần Hiệp lOMoAR cPSD| 59735516 Mục Lục
Lời nói đầu ............................................................................................................................................... 4
A- TỔNG QUAN VỀ CẢM BIẾN ............................................................................................................... 5
1. Cảm biến là gì? ................................................................................................................................. 5
2. Phân loại cảm biến ............................................................................................................................ 5
Phân loại cảm biến theo hình thái ....................................................................................................... 5
Phân loại cảm biến theo nguyên lý hoạt động .................................................................................... 5
Phân loại cảm biến theo phạm vi sử dụng .......................................................................................... 6
3. Ứng dụng của cảm biến .................................................................................................................... 6
4. Tìm hiểu về cảm biến đo khoảng cách .............................................................................................. 6
Có mấy loại cảm biến khoảng cách? .................................................................................................. 7
Khoảng cách xa nhất đo được ............................................................................................................ 7
5- Đo khoảng cách bằng cảm biến siêu âm ............................................................................................ 7
Sóng siêu âm là gì? ............................................................................................................................ 7
Cảm biến siêu âm là gì? ..................................................................................................................... 7
Cấu tạo của cảm biến siêu âm ........................................................................................................... 7
Nguyên lý cảm biến siêu âm: .............................................................................................................. 8
Ưu và nhược điểm của cảm biến sóng siêu âm.................................................................................. 8
Ứng dụng ........................................................................................................................................... 9
B- GIỚI THIỆU CẢM BIẾN HY SRF05 ..................................................................................................... 9
1. Giới thiệu chung .............................................................................................................................. 10
2. Nguyên lý hoạt động ........................................................................................................................ 11
3. Thông số kỹ thuật ............................................................................................................................ 14
4. Thiết kế cảm biến ............................................................................................................................ 14
5. Ứng dụng của cảm biến trong thực tiễn ........................................................................................... 14
C- KIỂM NGHIỆM THỰC TẾ .................................................................................................................. 14
1. Mục tiêu,quy trình và không gian thực nghiệm................................................................................. 15
2. Các phần mềm đã sử dụng trong khi làm báo cáo ........................................................................... 15
3. Thống kê và phân tích kết quả đo..................................................................................................... 15
a) Phạm vi đo ................................................................................................................................... 18
b) Sai số khi đo ................................................................................................................................. 22
c) Thời gian thu phát sóng siêu âm của cảm biến so với thực tế ...................................................... 30
D- Ứng dụng thực tiễn: Vòi nước tự động ....................................................................................... 32 lOMoAR cPSD| 59735516
2) Cơ chế hoạt động ............................................................................................................................... 34
3) Phỏng đoán ........................................................................................................................................ 34
4) Hướng giải quyết ................................................................................................................................ 34
5) Kết Quả ............................................................................................................................................... 34 lOMoAR cPSD| 59735516 Lời nói đầu
Ngày nay, trong các hệ thống đo lường - điều khiển, mọi quá trình đều được đặc
trưng bởi các biến trạng thái. Các biến trạng thái này thường là các đại lượng
không điện như nhiệt độ, áp suất, lưu lượng, tốc độ, độ di chuyển v.v… Để thực
hiện các quá trình đo lường và điều khiển cần phải thu thập thông tin, đo đạc, theo
dõi sự biến thiên của các biến trạng thái của quá trình thực hiện chức năng trên là
các thiết bị cảm biến. Cảm biến là các phần tử nhạy cảm dùng để biến đổi các đại
lượng đo lường, kiểm tra hay điều khiển từ dạng này sang dạng khác thuận tiện
hơn cho việc tác động của các phần tử khác. Cảm biến là một thiết bị chịu tác
động của đại lượng cần đo m không có tính chất điện và cho một đặc trưng mang
bản chất điện (như điện tích, điện áp, dòng điện, trở kháng) . Cảm biến thường
dùng ở khâu đo lường và kiểm tra. Các loại cảm biến được sử dụng rộng rãi trong
tự động hóa các quá trình sản xuất và điều khiển tự động các hệ thống khác nhau.
Chúng có chức năng biến đổi sự thay đổi liên tục các đại lượng đầu vào (đại
lượng đo lường - kiểm tra, là các đại lượng không điện nào đó thành sự thay đổi
của các đại lượng đầu ra là đại lượng điện, ví dụ: điện trở, điện dung, điện kháng,
dòng điện, tần số, điện áp rơi, góc pha,..
Một loại cảm biến mà chúng ta bắt gặp rất nhiều trong cuộc sống hàng ngày và
ứng dụng của nó cũng vô cùng rộng rãi, đó là cảm biến siêu âm . Ví dụ như bạn
thấy các loại cảm biến trong phòng, khi có người thì đèn sẽ bật sáng, còn nếu
không có người thì đèn sẽ tắt… hay khi bạn lái xe ô tô, khi phía đầu xe hoặc đuôi
xe của bạn sắp va chạm thì sẽ có hệ thống báo động cho bạn biết.
Cảm biến siêu âm có ứng dụng vô cùng rộng rãi và phổ biến.
Chính vì vậy nhóm chúng tôi quyết định thực hiện đề tài giới thiệu về cảm biến
siêu âm HYSRF05 để có thể hiểu hơn về cảm biến và những lợi ích to lớn của nó trong thực tiễn
Do kiến thức còn hạn chế và thời gian tìm hiểu chưa được nhiều nên bài tiểu luận
này còn nhiều thiếu xót. Bọn mình hi vọng sẽ nhận được nhiều ý kiến từ thầy
hướng dẫn và các bạn đọc để bài viết được hoàn thiện hơn. lOMoAR cPSD| 59735516
A- TỔNG QUAN VỀ CẢM BIẾN 1. Cảm biến là gì?
Có rất nhiều khái niệm cảm biến trên các trang mạng xã hội, nhưng về cơ bản
chúng đều giống nhau.
Cảm biến là một thuật ngữ chuyên ngành dùng để chỉ các loại cảm biến, đầu dò,
công tắc hoặc một loại thiết bị cảm nhận nào đó. Là các loại thiết bị có các bộ
phận cảm nhận, tiếp xúc theo một phương thức nào đó để có thể đo lường các
đại lượng hay hiện tượng vật lý nào đó. Bên cạnh đó các sensor còn có các bộ
phận xử lý tín hiệu và cho ra các dạng tín hiệu khác nhau để người dùng có thể
kết nối với các thiết biết hỗ trợ và điều khiển. 2. Phân loại cảm biến
Tùy theo các đặc trưng, cảm biến có thể được chia thành nhiều loại khác nhau.
Phân loại cảm biến theo hình thái
Cảm biến chủ động: ở đây cảm biến này không sử dụng điện năng bổ sung
để chuyển sang tín hiệu điện. Tiêu biểu là loại cảm biến áp điện được làm bằng
vật liệu gốm, chuyển áp suất thành điện tích trên bề mặt.
Cảm biến bị động: có sử dụng điện năng bổ sung để chuyển sang tín hiệu
điện. Tiêu biểu là các photodiode khi có ánh sáng chiếu vào thì có thay đổi của
điện trở tiếp giáp bán dẫn p-n được phân cực ngược.
Phân loại cảm biến theo nguyên lý hoạt động
Cảm biến điện trở: hoạt động dựa theo di chuyển con chạy hoặc góc quay
của biến trở hoặc sự thay đổi điện trở do co giãn vật dẫn.
Cảm biến cảm ứng: cảm biến biến áp vi phân, cảm biến cảm ứng điện từ,
cảm biến dòng xoáy, cảm biến cảm ứng điện động, cảm biến cảm ứng điện động
Cảm biến điện trường: cảm biến áp điện... lOMoAR cPSD| 59735516
Phân loại cảm biến theo phạm vi sử dụng
Cảm biến có thể phân ra theo pham vi sử dụng như: Cảm biến dùng trong công
nghiệp, Cảm biến dùng cho nghiên cứu khoa học, Cảm biến dùng cho môi trường,
khí tượng, Cảm biến dùng cho thông tin, viễn thông, Cảm biến dùng cho nông
nghiệp, Cảm biến dùng cho dân dụng, Cảm biến dùng cho giao thông, Cảm biến
dùng cho vũ trụ, Cảm biến dùng cho quân sự
3. Ứng dụng của cảm biến
Thiết bị cảm ứng là một sản phẩm công nghệ tiên tiến được sử dụng trong nhiều
lĩnh vực của đời sống xã hội như: trong sinh hoạt, trong kinh doanh thương mại,
trong bảo mật, trong vận tải hàng không,...
Cảm biến là thiết bị có thể nhận biết được vật ở cự li nhất định theo lập trình của
nó mà không phải chạm vào vật.
Chúng ta có rất nhiều loại cảm biến như: cảm biến nhiệt, cảm biến không khí, cảm
biến âm thanh, cảm biến màu sắc, cảm biến tần số, cảm biến từ trường… Mỗi loại
cảm biến có những ứng dụng khác nhau
Sau đây là một số ứng dụng phổ biến của cảm biến:
Trong sinh hoạt thiết bị cảm biến chúng ta thường thấy là như cảm biến âm
thanh ( vỗ tay tắt đèn), cảm biến từ trường ( ra khỏi phòng đèn tự tắt),cảm biến ánh sáng (điều hòa) ....
Trong sản xuất công nghiệp thì thiết bị cảm biến chủ yếu để ngắt dòng điện
khi quá tải, nóng hoặc bị ẩm để bảo vệ thiết bị điện an toàn.
Trong tự động hóa, cảm biến có vai trò quan trọng trong quá trình nói riêng và
trong các hệ thống điều khiển tự động nói chung.
4. Tìm hiểu về cảm biến đo khoảng cách
Như tên gọi của thiết bị, cảm biến khoảng cách chuyên dùng để đo khoảng cách
từ một điểm tham chiếu đến vật thể. Đây là một loại cảm biến dùng phổ biến trong
môi trường công nghiệp, kho bãi,… lOMoAR cPSD| 59735516
Có mấy loại cảm biến khoảng cách?
Cảm biến dùng để đo khoảng cách được phân làm những loại sau: •
Cảm biến khoảng cách bằng tia laser •
Đo khoảng cách bằng cảm biến siêu âm •
Cảm biến tiệm cận đo khoảng cách
Khoảng cách xa nhất đo được
Khoảng cách xa nhất đo được thuộc về dòng cảm biến laser, cảm biến đo khoảng
cách dòng này có thể đo được vật thể cách xa đến 3000m.
5- Đo khoảng cách bằng cảm biến siêu âm
Sóng siêu âm là gì?
Sóng siêu âm được định nghĩa là một loại sóng có tần số cao mà con người
không thể nghe thấy được.
Cảm biến siêu âm là gì?
Cảm biến siêu âm là một thiết bị cảm biến hoạt động dựa trên sóng siêu âm. Cũng
giống như các loại cảm biến áp suất hay cảm biến nhiệt độ, cảm biến siêu âm
được dùng chủ yếu là để đo khoảng cách hoặc vận tốc. Ngoài ra thì còn được sử
dụng trong các ứng dụng như làm sạch bằng sóng siêu âm hoặc dùng trong siêu
âm y khoa (siêu âm chuẩn đoán hình ảnh).
Cấu tạo của cảm biến siêu âm
Phần phát tín hiệu:Phát sóng siêu âm
Phần thu tín hiệu:Chờ nhận sóng phản hồi
Phần xử lý, điều khiển: thường sử dụng một vi điều làm nhiệm vụ phát xung, xử lý
tính toán thời gian từ khi phát đến khi thu được sóng siêu âm do nó phát ra nếu
nhận được tín hiệu TRIG lOMoAR cPSD| 59735516
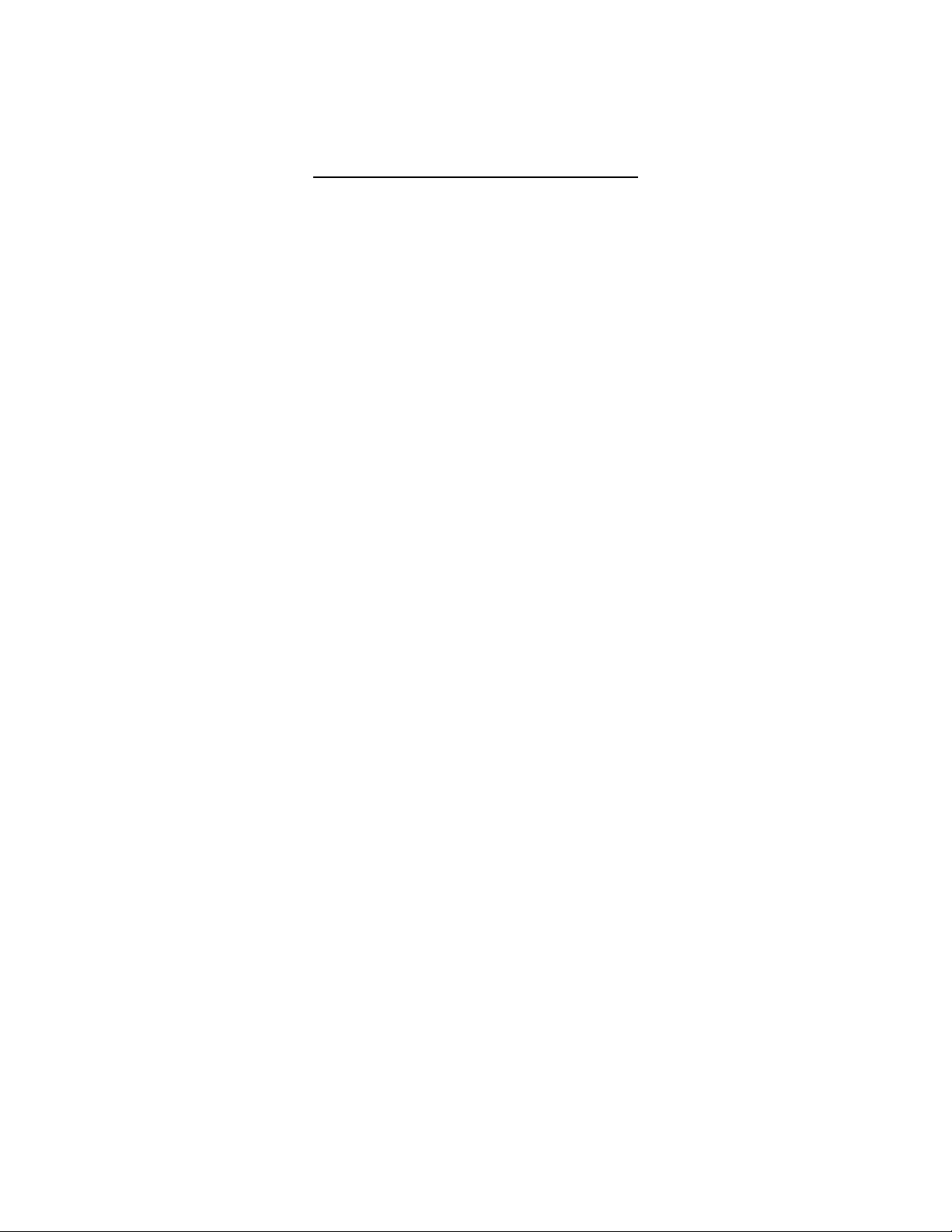
Nguyên lý cảm biến siêu âm:
Đầu tiên, đầu cảm biến sẽ phát ra 1 chùm sóng siêu âm xuống bề mặt cần đo
khoảng cách. Khi sóng siêu âm gặp bề mặt vật cản sẽ phản xạ ngược lại. Khi đó
cảm biến sẽ thu lại các chùm sóng siêu âm này.
Dựa vào thời gian phản xạ và vận tốc của sóng, cảm biến sẽ tính ra được khoảng
cách từ cảm biến xuống bề mặt chất lỏng.
Ưu và nhược điểm của cảm biến sóng siêu âm *Ưu điểm
Sử dụng sóng siêu âm nên có thể đo khoảng cách mà không cần tiếp xúc với
vật chất cần đo. Vì thế, cảm biến siêu âm thường được dùng để đo mức chất lỏng
có độ ăn mòn cao như acid hoặc xăng, dầu,…
Sóng siêu âm là một loại âm thanh có tần số cao nên độ nhạy của cảm biến rất
cao, thời gian đáp ứng nhanh.
Độ chính xác của cảm biến siêu âm gần như là tuyệt đối, sai số trung bình
khoảng 0,15% đối với khoảng cách 2m trở lại. lOMoAR cPSD| 59735516 *Nhược điểm
Cảm biến siêu âm chịu ảnh hưởng nhiều bởi nhiệt độ và áp suất. Vì thế nó chỉ
hoạt động tốt nhất ở môi trường có nhiệt độ từ 60 độ C trở xuống và áp suất khoảng 1 bar trở lại.
Các loại cảm biến siêu âm đo mức chất lỏng có chi phí đầu tư ban đầu là khá
cao so với các loại cảm biến đo mức chất lỏng khác.
Một nhược điểm khác là cảm biến siêu âm rất dễ bị nhiễu tín hiệu nên khi lắp
đặt, bạn cần phải lắp theo đúng hướng dẫn của nhà sản xuất. Ứng dụng
Cảm biến siêu âm có rất nhiều ứng dụng như: Đo khoảng cách phát hiện vật
cản, Đo mức nước, Chuẩn đoán hình ảnh
Để hiểu rõ hơn về các ứng dụng trên.Sau đây, chúng ta cùng tìm hiểu về cảm
biến HY SRF05 - Là dòng cảm biến siêu âm dùng để đo khoảng cách; đo mức
chất lỏng, phát hiện vật cản giúp robot dò đường hoặc tìm các vết đứt gãy
trong dây cáp hay bề mặt của vật….
B- GIỚI THIỆU CẢM BIẾN HY SRF05 lOMoAR cPSD| 59735516 1. Giới thiệu chung
Cảm biến siêu âm khắc phục nhiều điểm yếu của cảm biến IR - chúng cung
cấp khả năng đo khoảng cách bất kể màu sắc và ánh sáng của chướng ngại vật
Chúng cũng cung cấp khoảng cách tối thiểu thấp hơn và góc phát hiện rộng hơn
để đảm bảo rằng các chướng ngại vật không bị trượt bởi một chùm cảm biến hẹp.
Cảm biến này là bản nâng cấp từ HC-SRO4 có độ chính xác thấp hơn. Cảm
biến này có 5 chân và có thể được sử dụng trong 1 hoặc 2 pin
Công cụ đo khoảng cách SRF05 cho phép tìm khoảng cách của các đối tượng
phía trước nó. Nó thực hiện điều đó bằng cách gửi xung siêu âm và đo thời gian
cần thiết để các xung di chuyển đến chướng ngại vật và quay lại
Mô-đun dao động siêu âm HY-SRF05 cung cấp chức năng đo không tiếp xúc
từ 2cm - 400cm, phạm vi độ chính xác có thể đạt đến 3mm. Mô-đun bao gồm máy
phát, máy thu và mạch điều khiển
SRF05 là một bước tiến hóa từ SRF04 và được thiết kế để tăng tính linh hoạt,
tăng phạm vi, và để giảm chi phí vẫn còn hơn nữa. Do đó, SRF05 hoàn toàn
tương thích với SRF04. Phạm vi là tăng từ 3 mét lên 4 mét. Một chế độ hoạt động
mới (buộc chân chế độ xuống đất) cho phép SRF05 sử dụng một chân duy nhất
cho cả bộ kích hoạt và tiếng vọng, do đó tiết kiệm được các chân có giá trị trên bộ lOMoAR cPSD| 59735516
điều khiển của bạn. Khi pin chế độ không được kết nối, SRF05 hoạt động với các
chân kích hoạt và tiếng vọng riêng biệt, giống như SRF04. SRF05 bao gồm một
độ trễ nhỏ trước xung tiếng vang để cung cấp cho các bộ điều khiển chậm hơn
như Dấu cơ bản và thời gian Picaxe để thực hiện xung của chúng trong các lệnh 2. Nguyên lý hoạt động
Cảm biến siêu âm có 2 chế độ hoạt động chính:
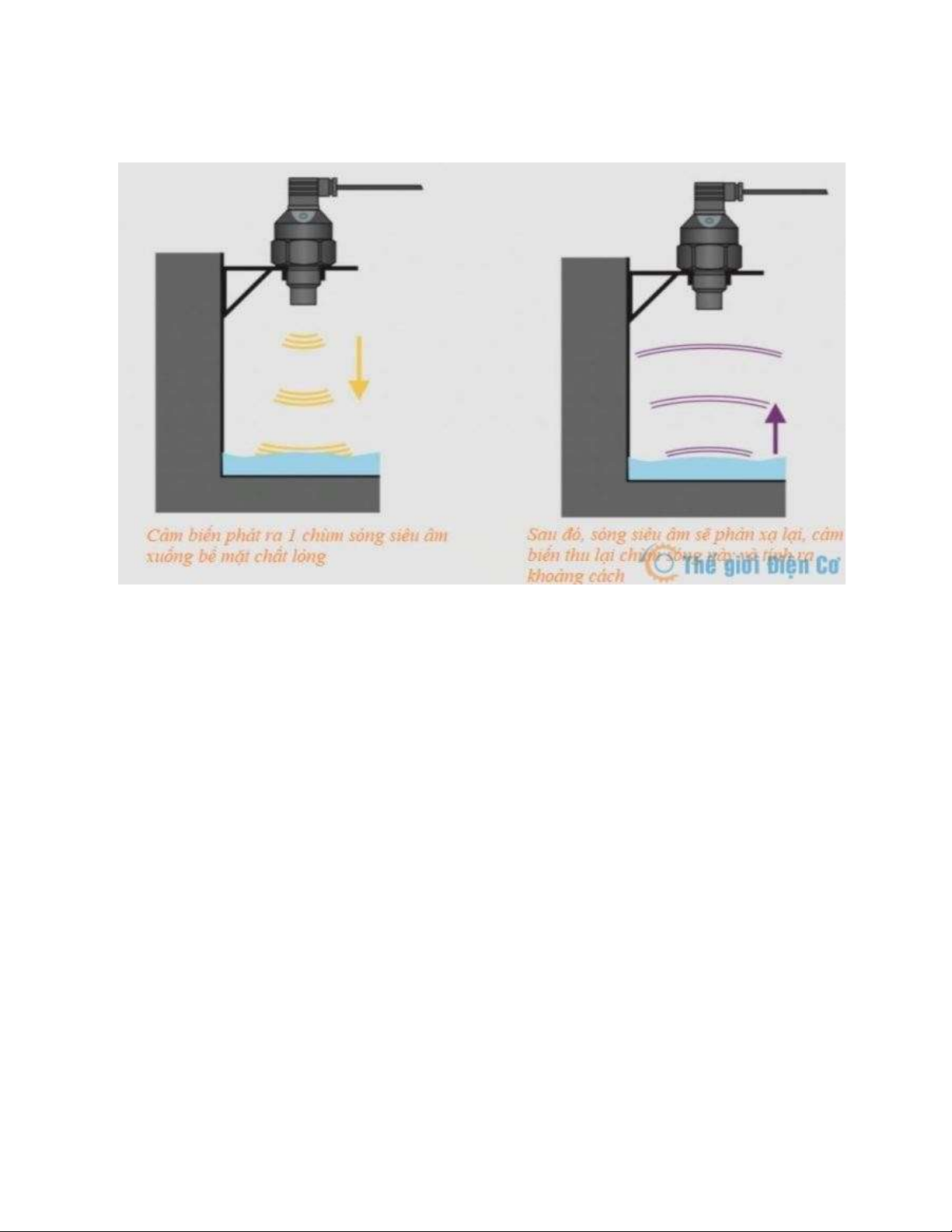
Chế độ 1: Tách biệt, kích hoạt và phản hồi
Để đo khoảng cách, các bạn phát một xung ngắn (5 microSeconds) từ chân TRIG.
Sau đó cảm biến sẽ tạo ra một xung HIGH phản xạ ở chân này. Chiều rộng của
xung sẽ bằng với thời gian sóng siêu âm được phát từ cảm biến quay trở lại. Tốc
độ tương đương 29.412 microSeconds/cm. Khi tính được thời gian ta chia cho
29.412 để lấy khoảng cách. Mô phỏng proteus và hình dạng tín hiệu Chế độ 1
được thể hiện qua Hình 1 và Hình 2 dưới đây lOMoAR cPSD| 59735516 lOMoAR cPSD| 59735516
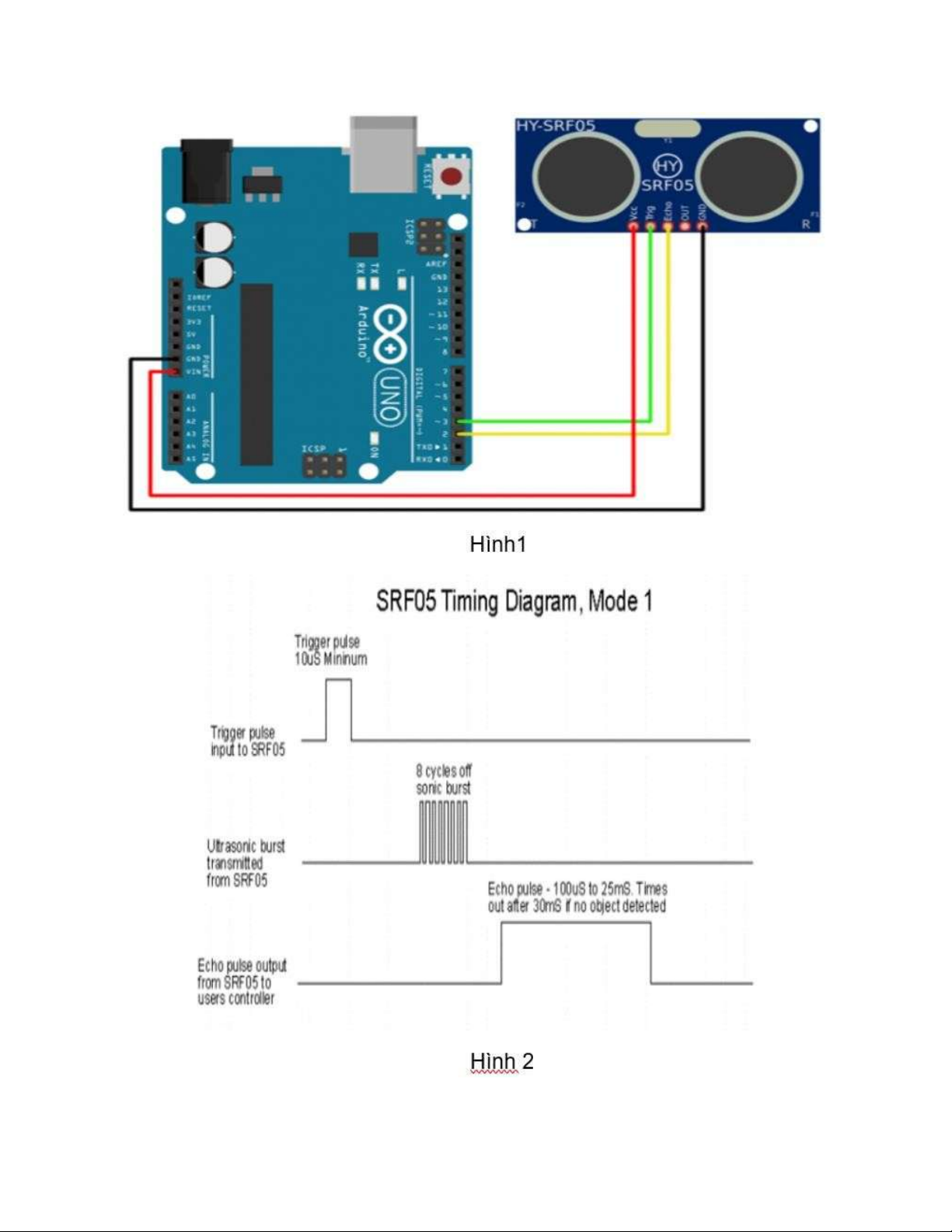
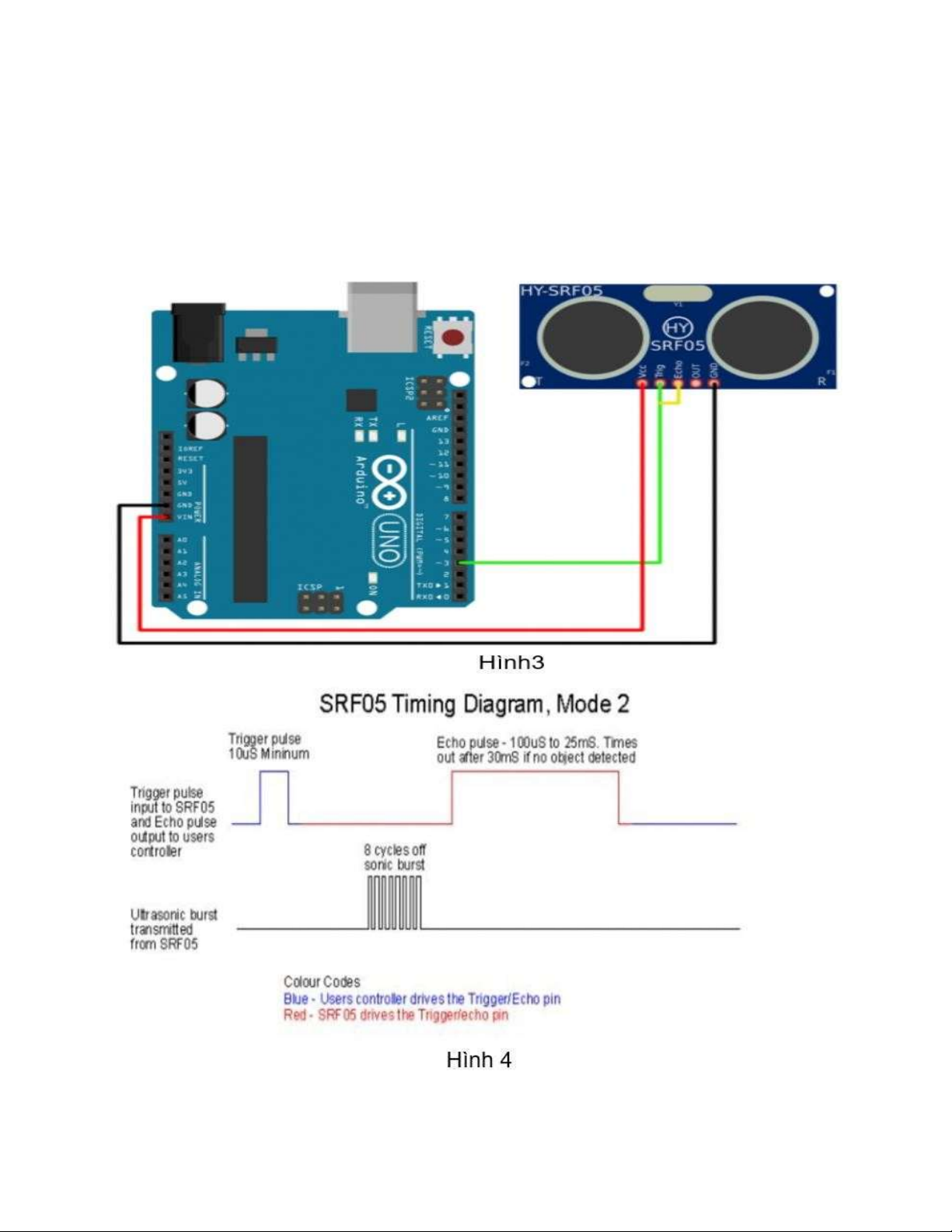
Chế độ 2: Ta sử dụng 1 chân để cảm biến vừa phát ra xung rồi vừa nhận xung
phản xạ về, chân chế độ thì nối đất. Tín hiệu hồi tiếp sẽ xuất hiện trên cùng một
chân với tín hiệu kích hoạt. Cảm biến sẽ không tăng dòng phản hồi cho đến
700microSeconds sau khi kết thúc các tín hiệu kích hoạt và bạn đã có thời gian để
kích hoạt pin xoay quanh và làm cho nó trở thành 1 đầu vào. Mô phỏng proteus và
hình dạng tín hiệu Chế độ 1 được thể hiện qua Hình 3 và Hình 4 dưới đây lOMoAR cPSD| 59735516 3. Thông số kỹ thuật
- Điện áp làm việc : 5V(DC) - Dòng tĩnh: Ít hơn 2mA.
- Tín hiệu đầu ra : Tín hiệu tần số điện, mức cao 5V, mức thấp 0V.
- Góc cảm biến : Không quá 15 độ. - Phạm vi đo : 2cm-450cm.
- Tín hiệu trigger đầu vào : 10us TTL impulse
- Tín hiệu echo : Tín hiệu đầu ra TTL PWL - Sai số: 0,3cm
- Góc đo: lên đến 15 độ 4. Thiết kế cảm biến
Sơ đồ ra chân: có 5 chân - VCC: Chân cấp nguồn 5V
- Trigger: Kích hoạt quá trình phát sóng âm. Quá trình kích hoạt khi một chu
kì điện áp cao/thấp diễn ra.
- Echo: Bình thường sẽ ở trạng thái 0V, được kích hoạt lên 5V ngay sau khi
có tín hiệu trả về, sau đó trở về 0V - OUT: Không sử dụng
- GND: Chân cấp nguồn GND
5. Ứng dụng của cảm biến trong thực tiễn
Cảm biến siêu âm UltraSonic HY-SRF05 được sử dụng để nhận biết khoảng cách
từ vật thể đến cảm biến nhờ sóng siêu âm, cảm biến có thời gian phản hồi nhanh,
độ chính xác cao, phù hợp cho các ứng dụng phát hiện vật cản, đo khoảng cách bằng sóng siêu âm.
Trong thực tiễn, cảm biến siêu âm UltraSonic HY-SRF05 có rất nhiều ứng dụng
như dùng để đo khoảng cách các chứng ngại vật, đo mực chất lỏng trong bể,làm
robot rò đường, phát hiện các vết nứt gãy trong dây cáp
C- KIỂM NGHIỆM THỰC TẾ lOMoAR cPSD| 59735516
1. Mục tiêu,quy trình và không gian thực nghiệm
Để tìm hiểu kĩ về cảm biến HY SRF05, sau đây ta thực hiện một số thực
nghiệm đo khoảng cách bằng cảm biến HY SRF05. Thực nghiệm được tiến hành
trong môi trường đo ngoài không khí không có sự tác động của sóng siêu âm
khác và đủ không gian để đo khoảng cách. Mục tiêu của thực nghiệm như sau:
Mục tiêu 1: Thực hành lắp đặt cảm biến và đo khoảng cách theo 2 chế độ trong
nguyên lý hoạt động, kiểm nghiệm xem sơ đồ mô phỏng cắm dây ở 2 chế độ dung không
Mục tiêu 2: Tiến hành đo khoảng cách và kiểm nghiệm các đặc trưng của cảm
biến của cảm biến HY SRF05 như Khoảng cách đo, Sai số so với giá trị chuẩn
được nêu trong thông số kĩ thuật, Thời gian phát thu sóng siêu âm của cảm biến so với thực tế
2. Các phần mềm đã sử dụng trong khi làm báo cáo
Để kết quả phân tích dữ liệu 1 cách chính xác và tối ưu thời gian, chúng em đã sử
dụng một số công cụ giúp thuận lợi cho việc trình bày, tính toán và xử lý số liệu
như: Microsoft Word: Công cụ giúp ta viết trình bày báo cáo, ghi và phân tích kết
quả thu được 1 cách chi tiết đầy đủ , Microsoft Excel: Công cụ giúp thống kê, xử lý
số liệu, tính toán kết quả và vẽ đồ thị từ kết quả thu được.
3. Thống kê và phân tích kết quả đo
Mục tiêu 1: Thực hành lắp đặt cảm biến và đo khoảng cách theo 2 chế độ trong
nguyên lý hoạt động, kiểm nghiệm xem sơ đồ mô phỏng cắm dây ở 2 chế độ dung không
Ta thực hiện lắp mạch theo 2 chế độ trong phần nguyên lý hoạt động và đo khoảng cách
* Ở chế độ 1, ta thực hiện nối dây như hình 1 lOMoAR cPSD| 59735516
Kết nối như trong sơ đồ ta thu được kết quả thực tế minh họa qua Hình 5 sau đây
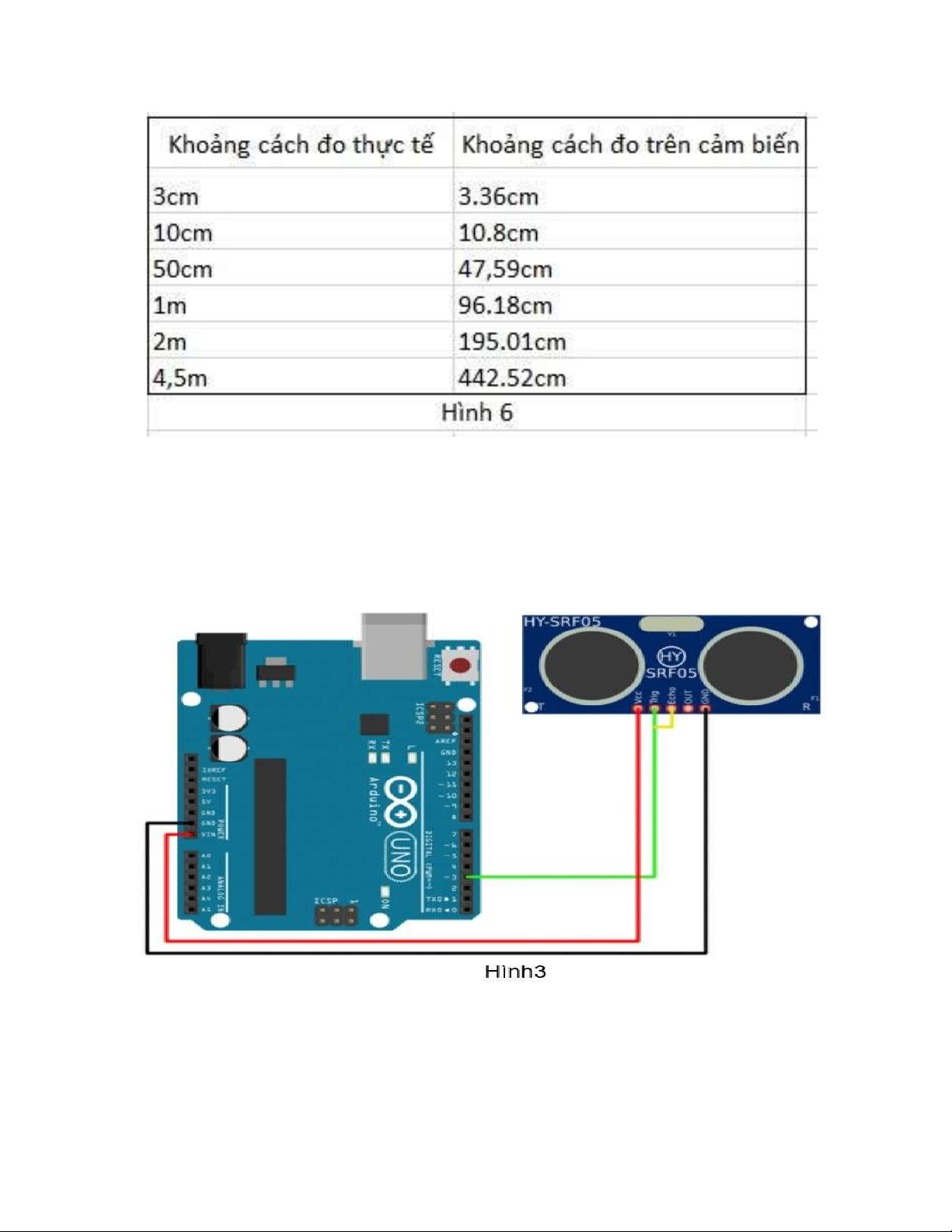
Tiếp theo, ta thực hiện đo thử khoảng cách tại 1 số vị trí trong khoảng cách
đo 2cm-450cm, từ đó kiểm nghiệm xem mô phỏng mạch sơ đồ chế độ 1 của
nguyên lý hoạt động đúng hay không. Ta tiến hành thực nghiệm và thu được kết quả như hình 6 lOMoAR cPSD| 59735516
⟹Từ kết quả thu được ở hình 6, ta có thể kết luận rằng: Cảm biến đo được
khoảng cách ở chế độ 1 của nguyên lý hoạt hoạt động. Sơ đồ mô phỏng cách
cắm dây ở chế độ 1 ở hình 1 là đúng
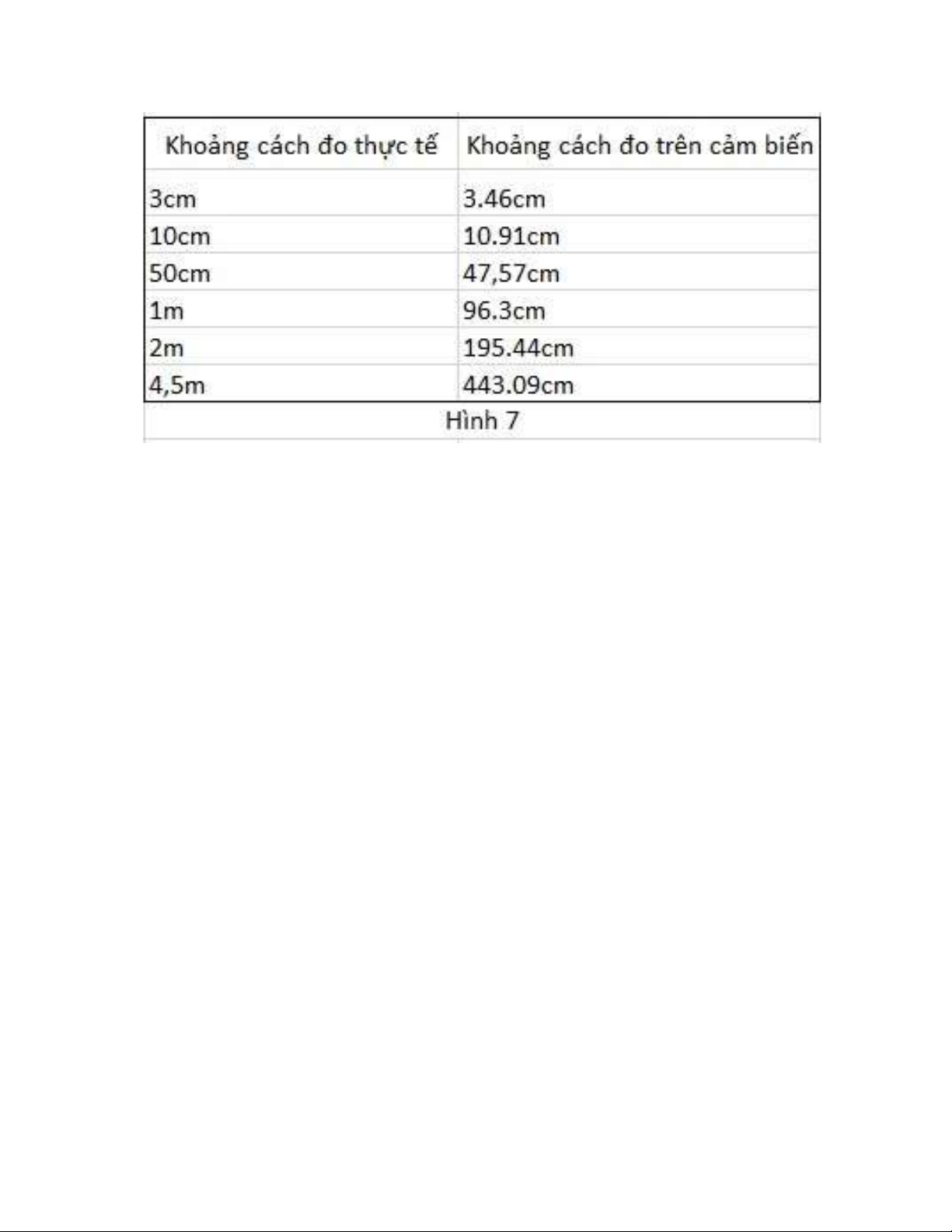
* Ở chế độ 2, ta thực hiện các bước ở chế độ 1 nhưng với sơ đồ nguyên lý như hình 3
Ta thu được kết quả như hình 7 lOMoAR cPSD| 59735516
⟹ Từ kết quả thu được ở hình 7, ta có thể kết luận rằng: Cảm biến đo được
khoảng cách ở chế độ 1 của nguyên lý hoạt hoạt động. Sơ đồ mô phỏng cách
cắm dây ở chế độ 2 ở hình 3 là đúng
Mục tiêu 2: Tiến hành đo khoảng cách và kiểm nghiệm các đặc trưng của cảm
biến của cảm biến HY SRF05 như Phạm vi đo nêu trong thông số kĩ thuật, Sai số
khi đo. Bên cạnh đó, ta khảo sát thêm đặc trưng về thời gian thu phát sóng siêu
âm của cảm biến so với thực tế a) Phạm vi đo
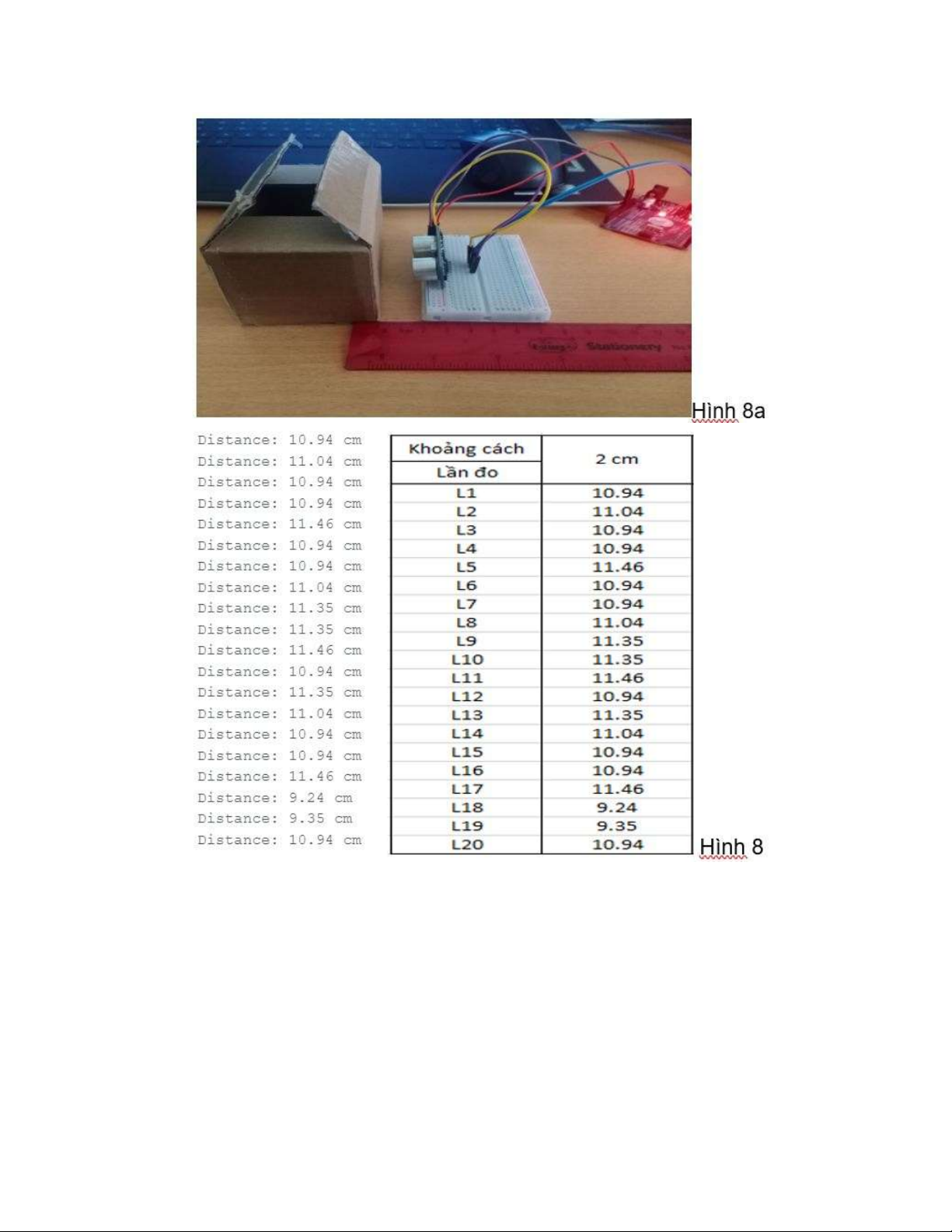
Theo thông số kĩ thuật ta có phạm vi đo của cảm biến là 2cm-450cm. Để kiểm
nghiệm điều này sau đây, ta tiến hành đo và ghi chép kết quả đo tại các vị trí tại
khoảng cách gần 2cm và khoảng cách xa nhất 450cm.
Tại vị trí 2cm, ta thiết kế thực nghiệm như hình 8a và thu được kết quá đo như hình 8 lOMoAR cPSD| 59735516
Thông qua các giá trị đo trong hình 8 ta thấy rằng: Các giá trị đo được trong
20 lần đo có sự sai lệch rất lớn so với giá trị 2cm ( hơn 4 lần). Do đo, ta có thể kết
luận rằng tại khoảng cách 2cm, cảm biến không nhận diện được vật,2cm chính là vùng mù của cảm biến
Để tìm được khoảng cách gần nhất mà cảm biến có thể đo được, ta tiến
hành di chuyển vật ra xa khỏi cảm biến từ vị trí 2cm và quan sát kết quả trên
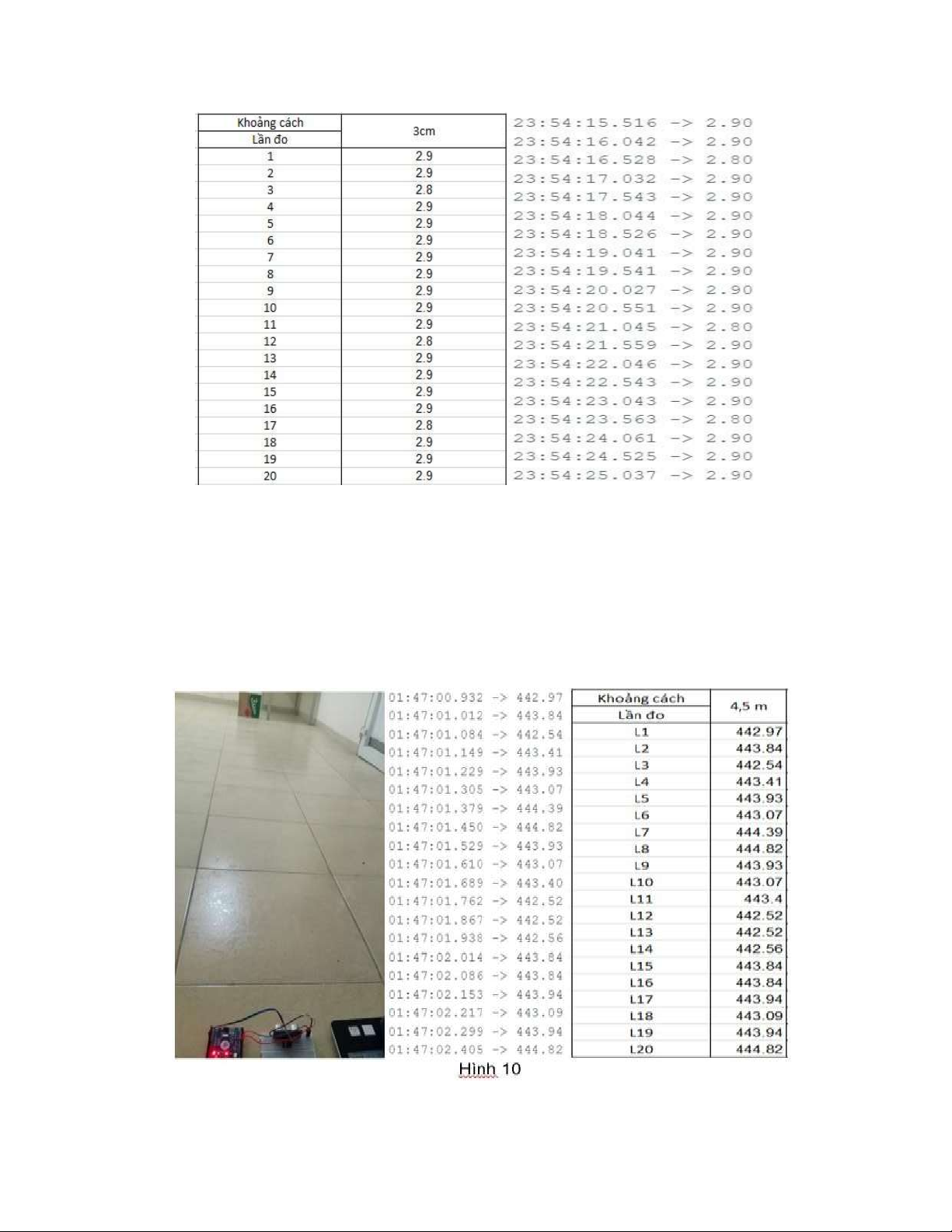
Serial Monitor của Arduino.Tại khoảng cách 3cm, ta thu được kết quả như hình 9 lOMoAR cPSD| 59735516
⟹Từ kết quả đo trong hình 9, ta có thể kết luận rằng: Khoảng cách gần nhất mà
cảm biến đo được là 3cm hay cảm biến bắt đầu nhận diện được vật cách cảm biến 3cm
Tiếp theo, ta tiếp tục xác định khoảng cách xa nhất mà cảm biến đo được
thông qua thực nghiệm đo khoảng cách tại vị trí 450cm, Ta tiến hành thiết kế thực
nghiệm và thu được kết quả đo như hình 10
Tài liệu liên quan:
-

Bài tập ôn tập Cơ học Kỹ thuật | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội
31 16 -
Chương 5 - Bài giảng: Cảm biến Biến dạng và Lực. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
73 37 -

Vật liệu 3 pha: Phân tích nội lực và biến dạng sử dụng lý thuyết trượt B1. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
69 35 -

Báo cáo thực hành buổi 3: Phân loại tụ điện và cuộn cảm. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
72 36 -
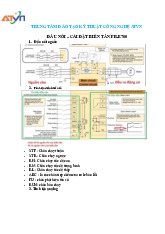
Hướng Dẫn Đấu Nối & Cài Đặt Biến Tần Mitsubishi FR-E. Môn Cơ học Kỹ thuật (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
66 33