Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
I. Mục tiêu - Áp dụng kiến thức đã học trong môn Hệ thống truyền động servo để điều khiển vận tốc động cơ DC bằng Vi điều khiển STM32. Biểu diễn mối quan hệ giữa vận tốc và giá trị đặt bằng đồ thị sát sử dụng STM32CubeMonitor. II . Phần cứng thiết bị. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:




Preview text:
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HCM
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO '¬&&¬'
BÁO CÁO THỰC TẬP
HỆ THỐNG TRUYỀN ĐỘNG SERVO
GVHD: VÕ LÂM CHƯƠNG HỌ VÀ TÊN MSSV
Đặng Hữu Hiếu 20146464 Tô Hoàng Hiếu 20146466
Nguyễn Văn Hạn h 20146331
THÀNH PHỐ HỒ CHÍ MINH, THÁNG 6 NĂM 2023 M c l ụ c ụ
BÀI THỰC HÀNH SỐ 1: ĐIỀU KHIỂN VẬN TỐC ĐỘNG CƠ DC
SERVO SỬ DỤNG VI ĐIỀU KHIỂN STM32 .............................................................. 3
I . Mục tiêu ........................................................................................................ 3
II . Phần cứng thiết bị ..................................................................................... 3
III . Tiến hành thí nghiệm .............................................................................. 6
IV . Kết quả đạt được và nhận xét ................................................................ 9
BÀI THỰC HÀNH SỐ 2: ĐIỀU KHIỂN VỊ TRÍ ĐỘNG CƠ DC SERVO
SỬ DỤNG VI ĐIỂU KHIỂN STM32 ............................................................................... 11
I . Mục tiêu ...................................................................................................... 11
II . Phần cứng thiết bị .................................................................................... 11
III . Tiến hành thí nghiệm ............................................................................ 14
IV . Kết quả đạt được và nhận xét .............................................................. 18
BÀI THỰC HÀNH SỐ 3: HỆ THỐNG SERVO ĐA TRỤC SỬ DỤNG
ĐỘNG CƠ AC SERVO VÀ MODULE ĐIỀU KHIỂN CHUYỂN ĐỘNG .. 19
I . Cơ sở lí thuyết ............................................................................................ 19
II . Giới thiệu hệ thống .................................................................................. 19
III . Kết quả đạt được .................................................................................... 25
BÀI THỰC HÀNH SỐ 4: HỆ THỐNG SERVO THỦY LỰC ........................... 36
I . Cơ sở lí thuyết ............................................................................................ 36
II .Giới thiệu hệ thống ................................................................................... 36
III . Tiến hành thí nghiệm ............................................................................. 40
BÀI THỰC HÀNH SỐ 1: ĐIỀU KHIỂN VẬN TỐC ĐỘNG CƠ DC SERVO
SỬ DỤNG VI ĐIỀU KHIỂN STM32 I . Mục tiêu - Áp dụn
g kiến thức đã học trong môn Hệ thống truyền động servo để điều khiển
vận tốc động cơ DC bằng Vi điều khiển STM32
- Biểu diễn mối quan hệ giữa vận tốc và giá trị đặt bằng đồ thị lên màn hình giám
sát sử dụng STM32CubeMonitor
II . Phần cứng thiết bị
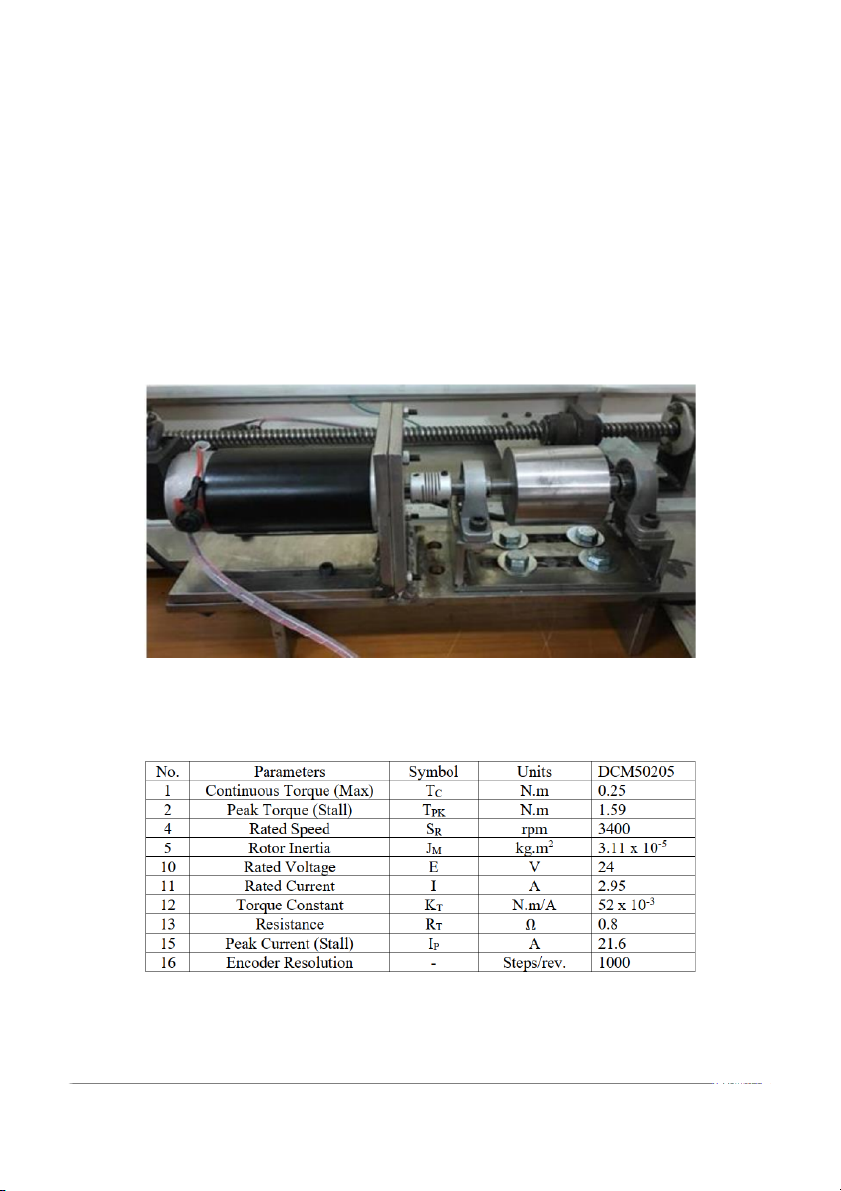
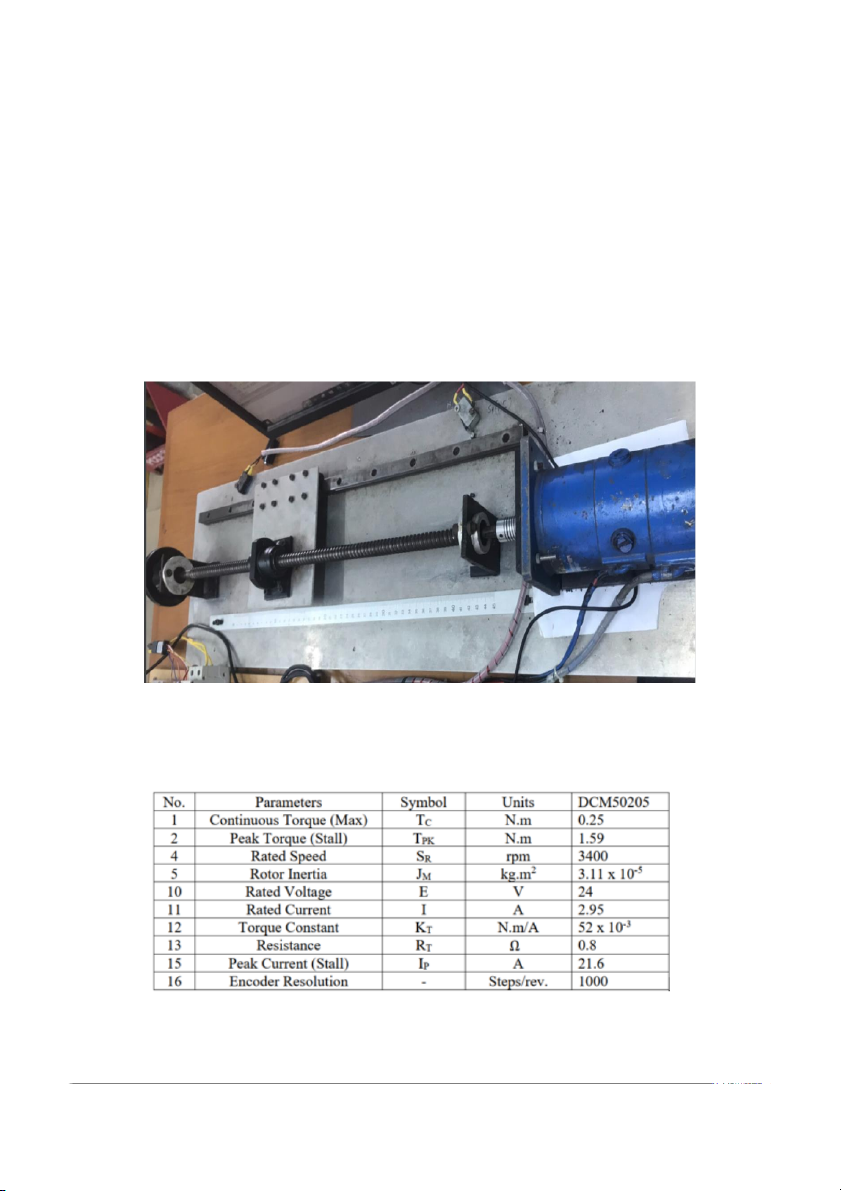
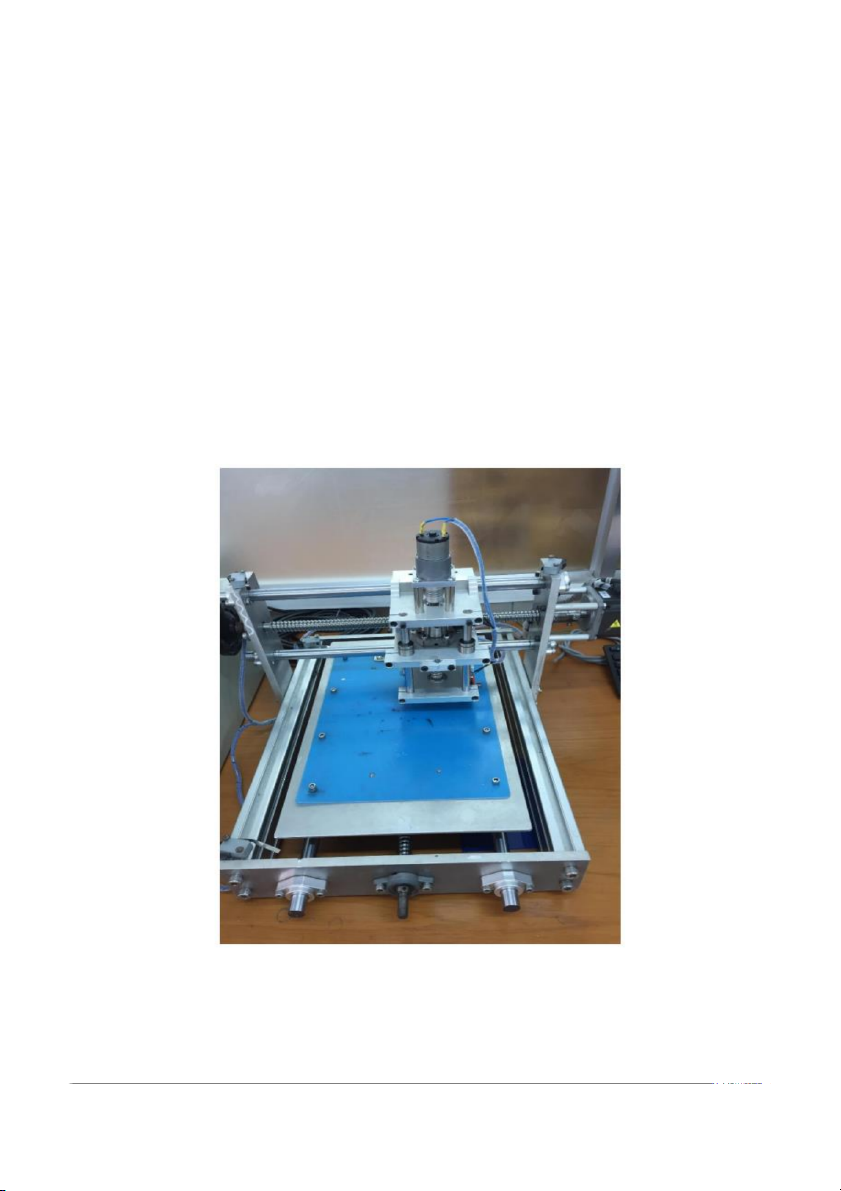
Hình 1: Hệ thống Servo một trục sử dụng động cơ DC và Encoder 2.1 Động cơ DC
Bảng đặc tính của động cơ: - Thông số của tải:
+ Khối lượng: m=0.81774 kg + Chất liệu: Thép CT3
+ Đường kính trục: R= 0.025m
Do vậy, moment quán tính của tải là : 1 1 2 2 4− 2 J = mr = 0.81774 0.025= 2.56 10 [kg.m L 2 2 2.2 Encoder
- Sử dụng Encoder để xác định vận tốc và vị trí của động cơ thông qua số xung trả
về. Trong thực tế có rất nhiều chế độ đọc Encoder, tuy nhiên trong thí nghiệm này
chúng ta đọc ở chế độ 4X để đạt được độ chính xác cao nhất .
- Encoder được sử dụng trong thí nghiệm này có độ phân giải là 1000 xung/ vòng
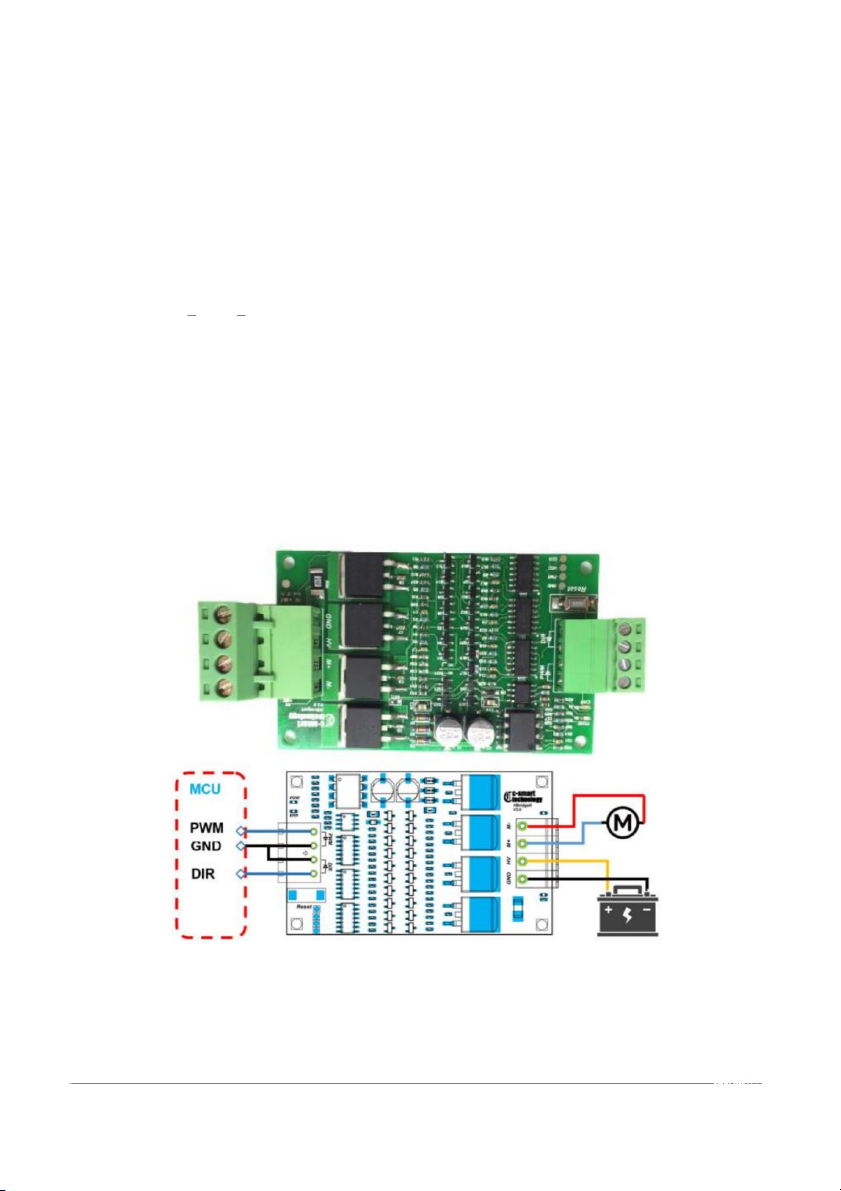
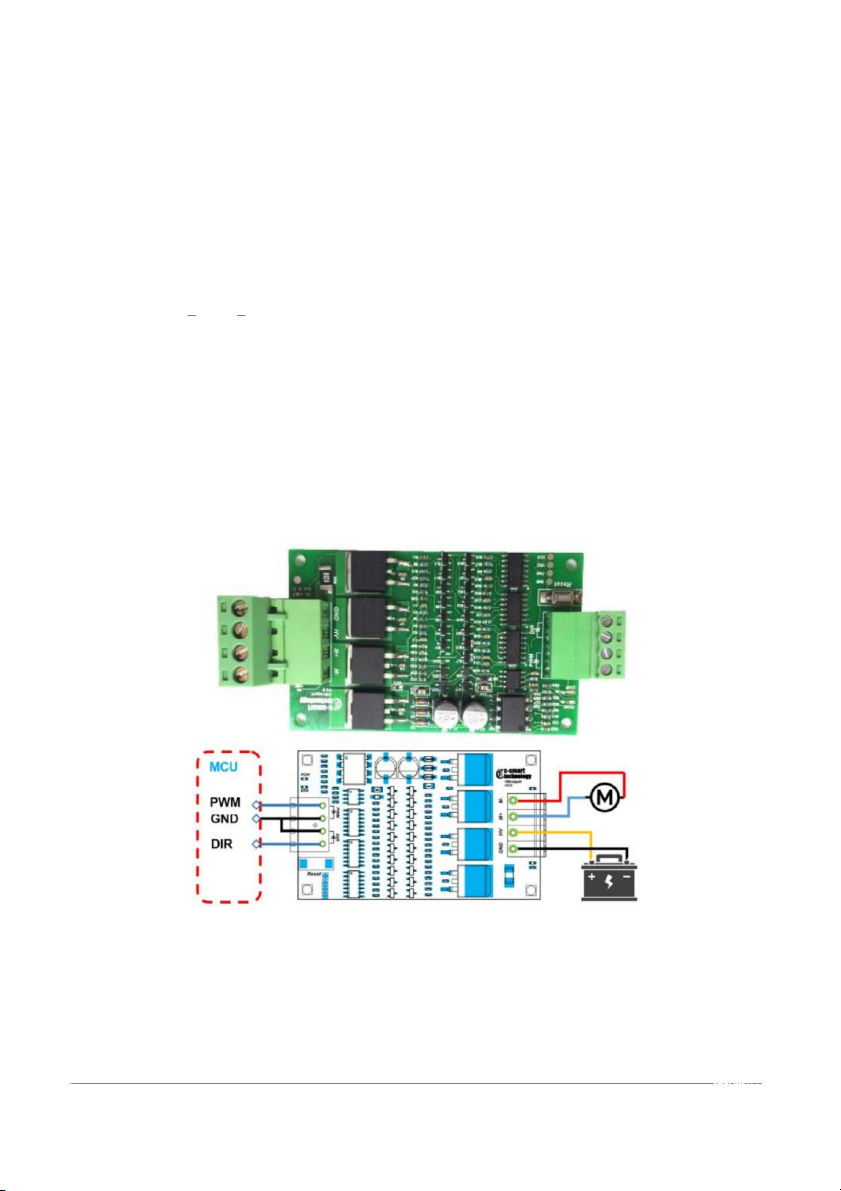
2.3 Mạch cầu H
- Dùng làm mạch công suất cung cấp năng lượng làm quay động cơ.
Hình 2: Mạch cầu H và sơ đồ chân
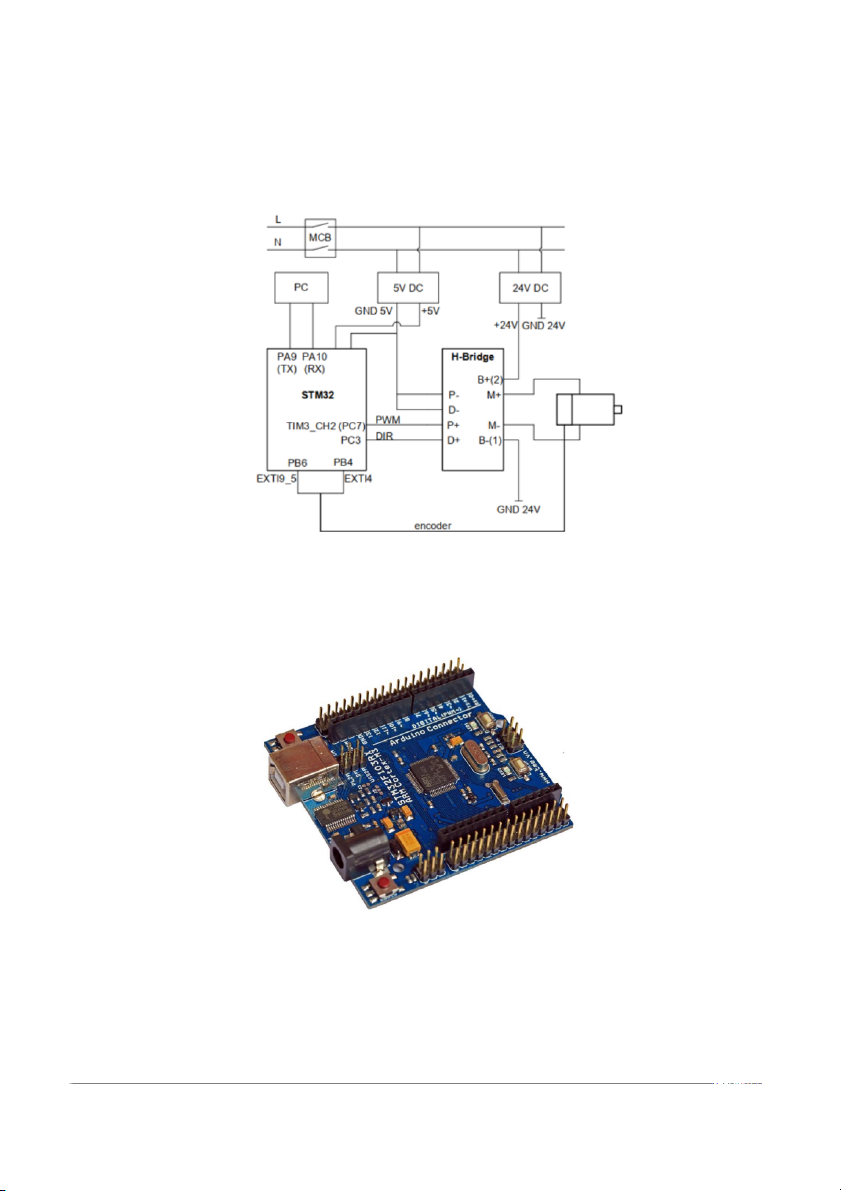
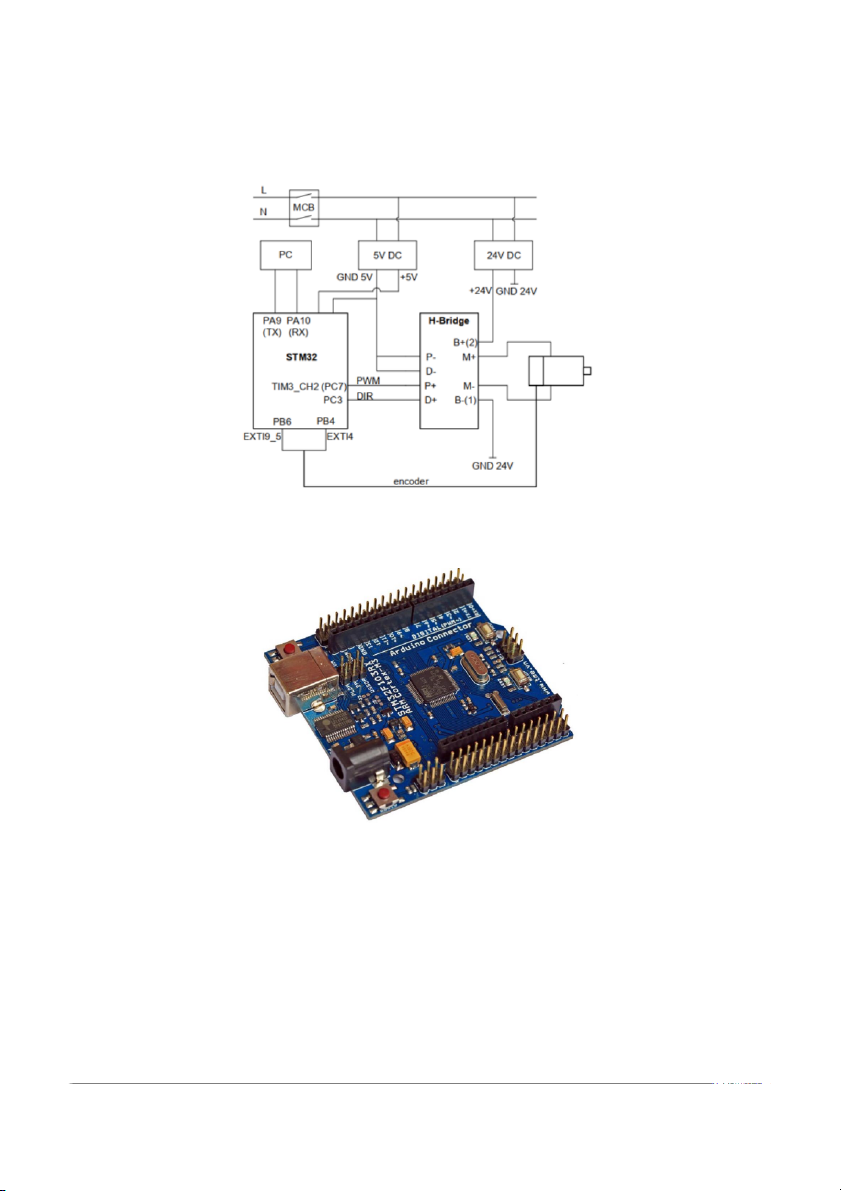
2.4 Sơ đồ kết nối
a. Kết nối phần cứn g
Hình 3: Sơ đồ kết nối phần cứng thiết bị b. Board STM32F103RX Hình 4: Board STM32F103RX
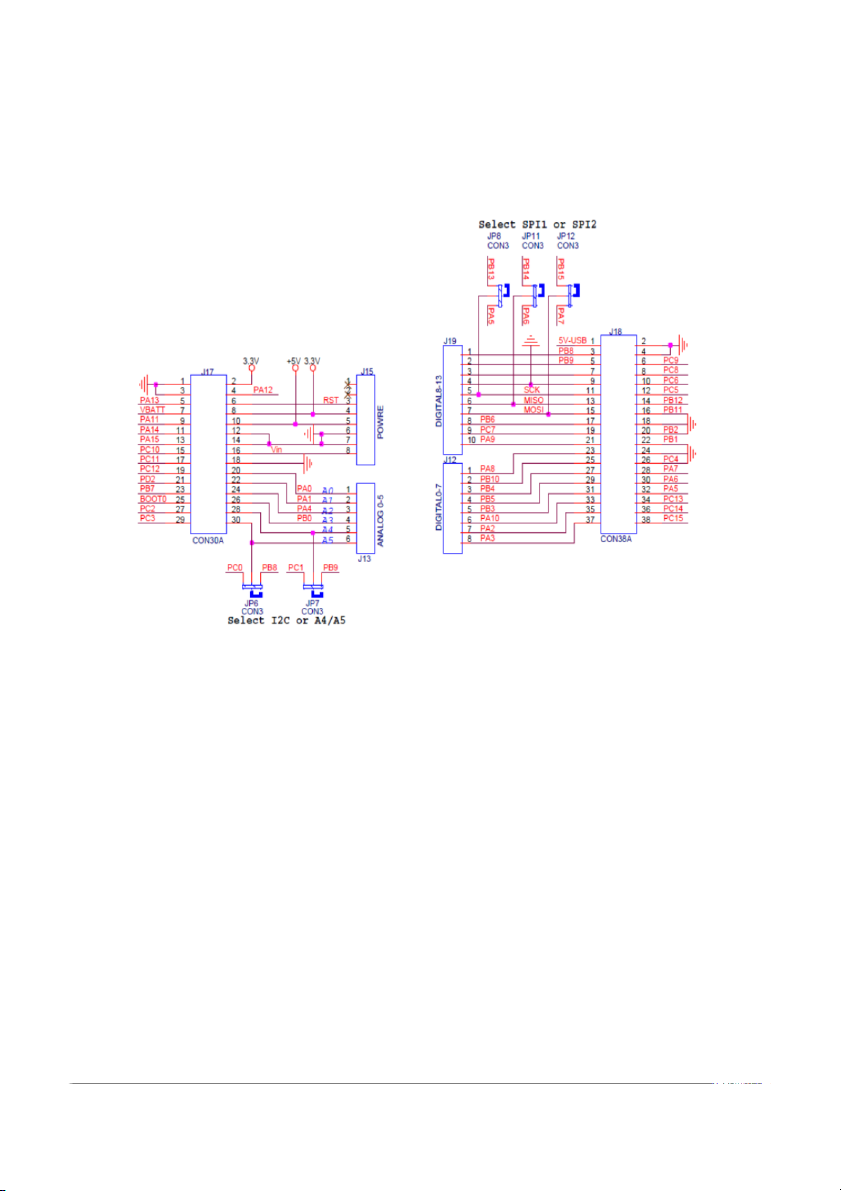
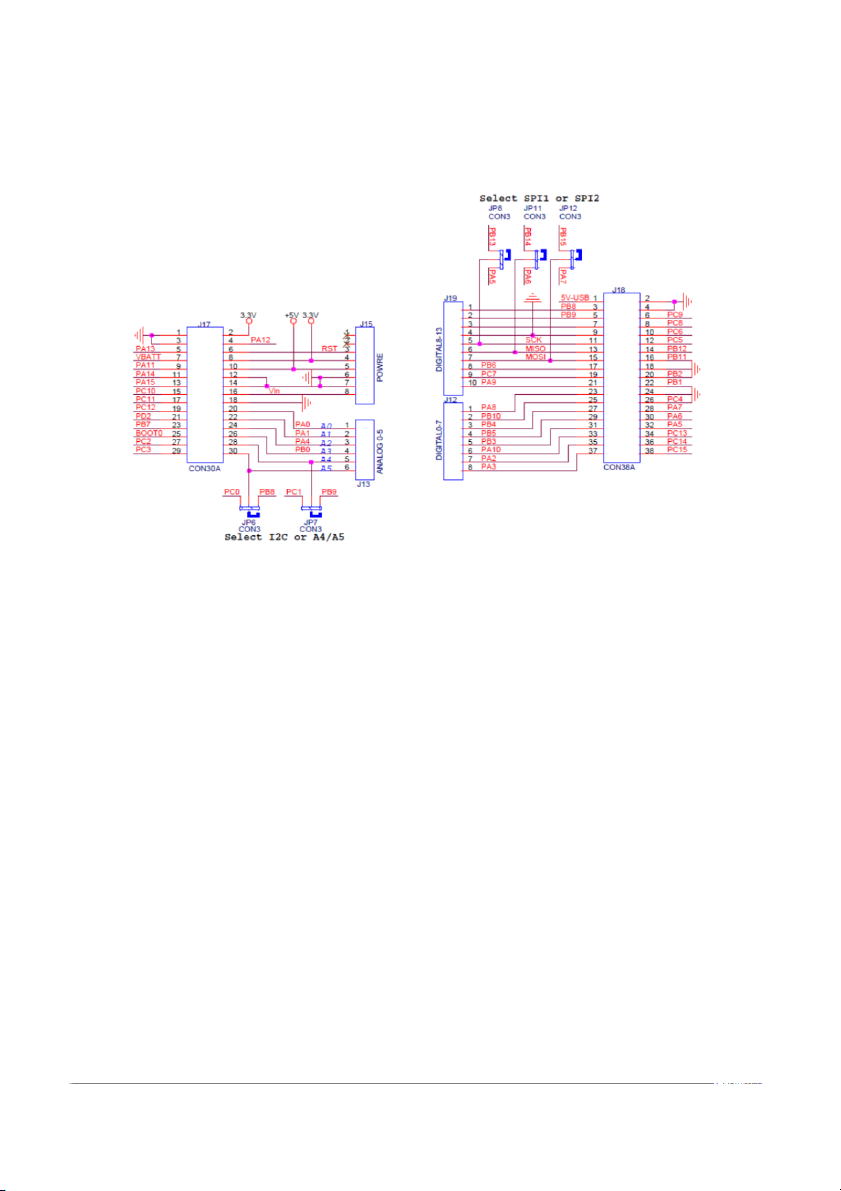
Hình 5: Sơ đồ chân I/O STM32F103RX
III . Tiến hành thí nghiệm
- Cấu hình chân như sơ đồ phần cứng
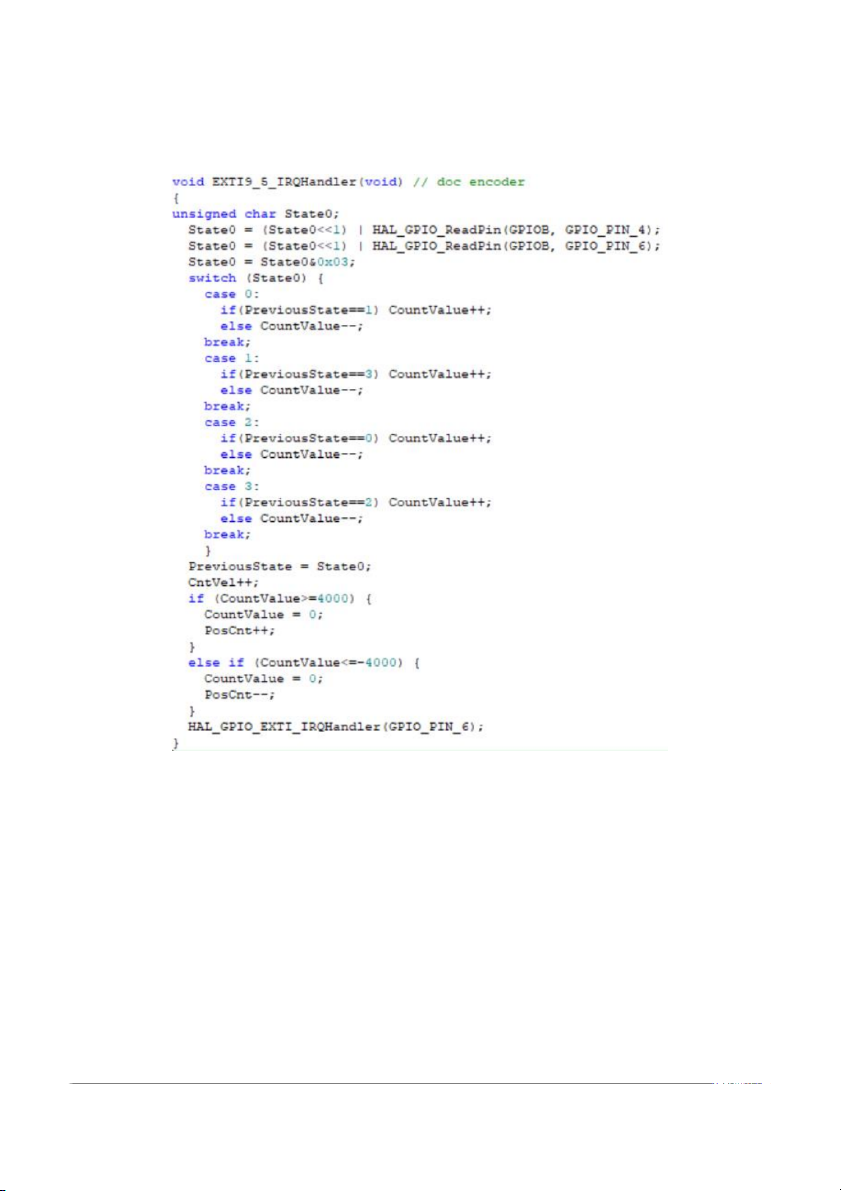
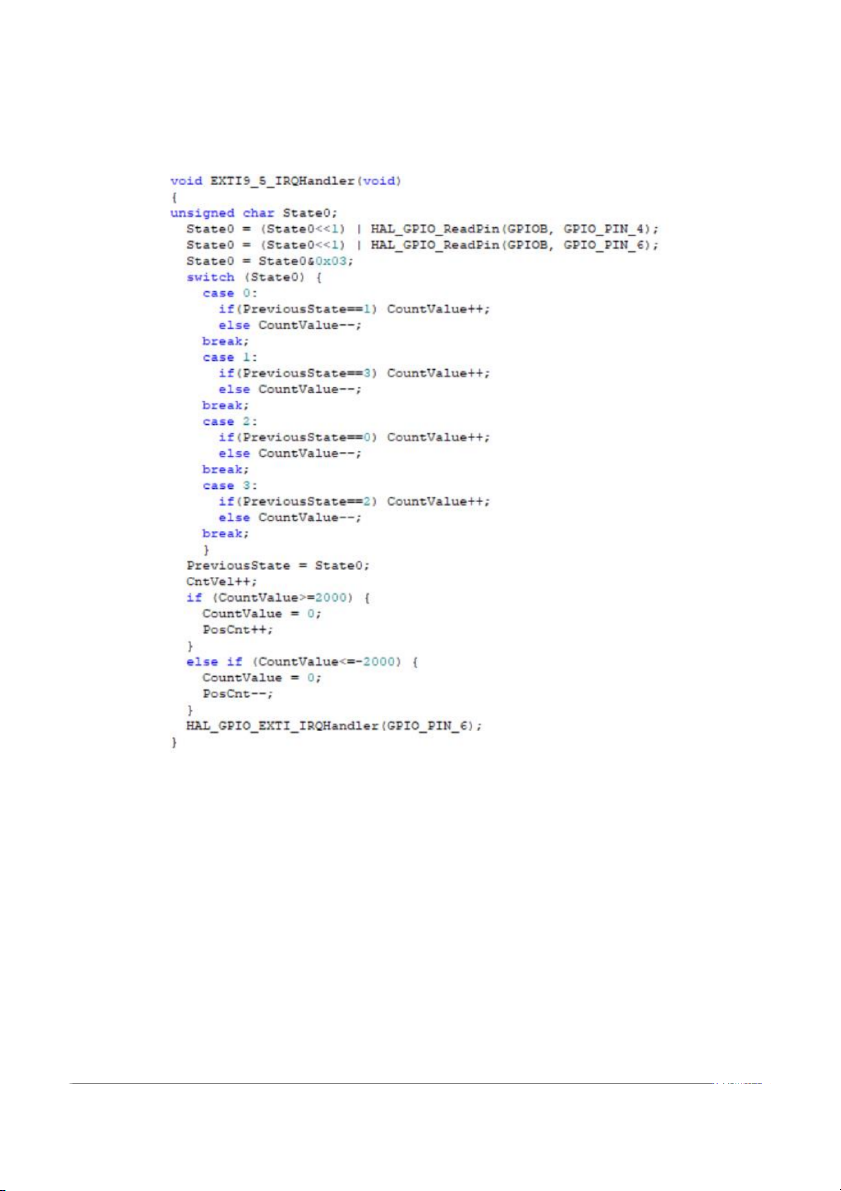
- Tiến hành viết hàm đọc encoder đọc chế độ 4X + Đọc tín hiệu từ k ênh A (PC3) :
Hình 6: Đọc tín hiệu từ Encoder sử dụng chân ngắt ngoài PC3
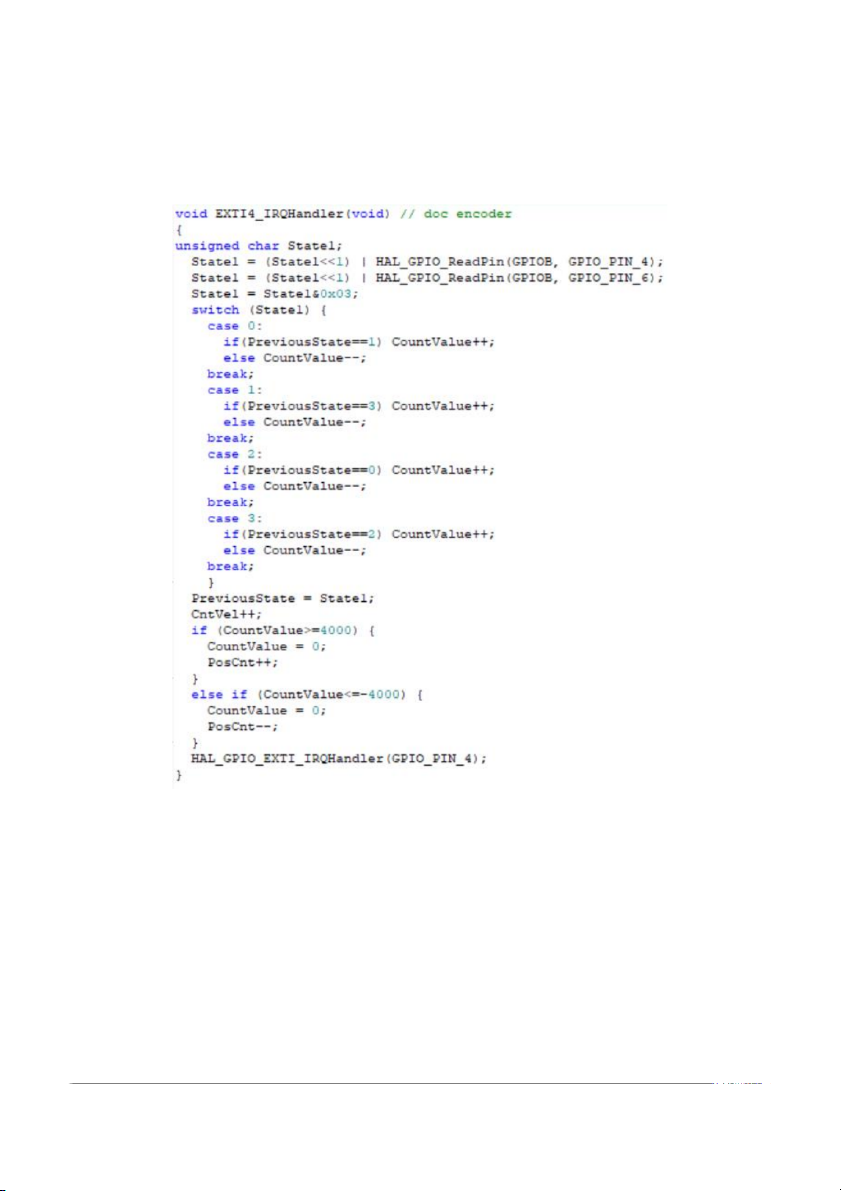
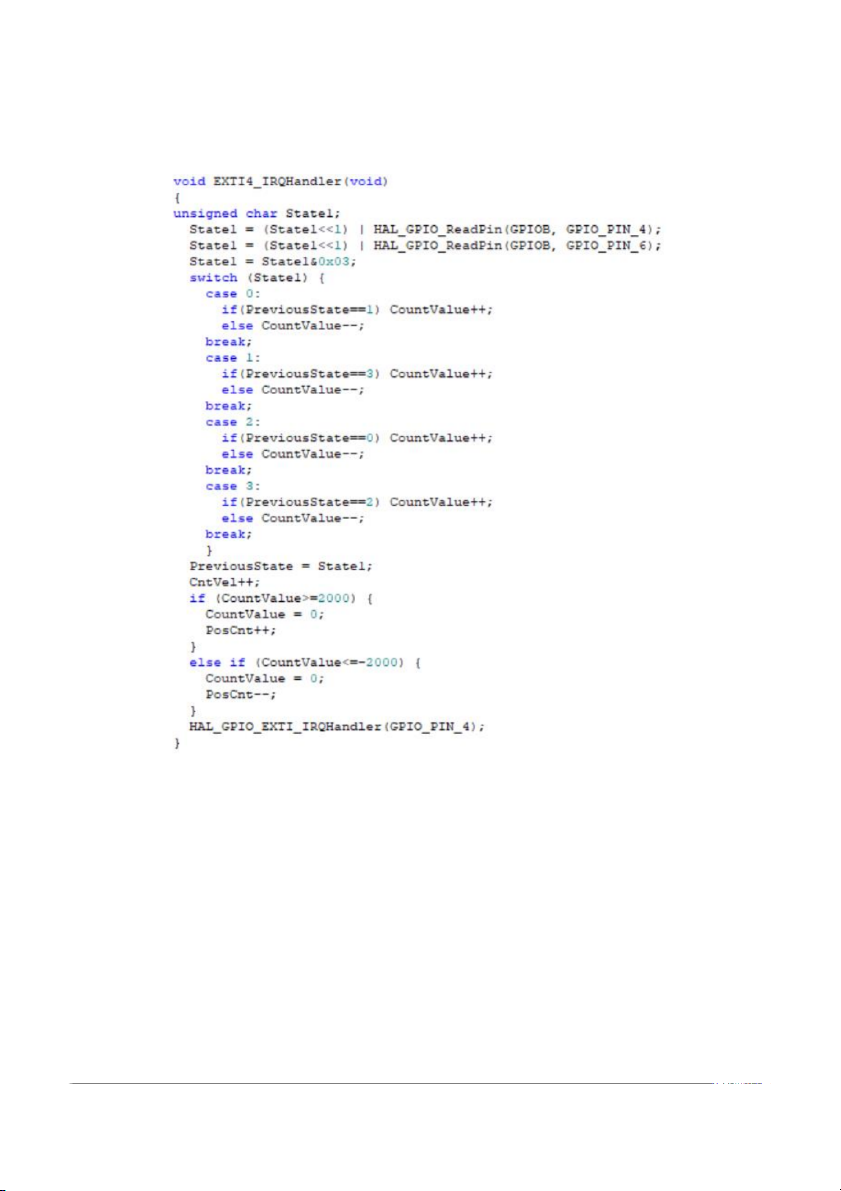
+ Đọc tín hiệu từ kênh B (PC7):
Hình 7: Đọc tín hiệu từ Encoder sử dụng chân ngắt ngoài PC7
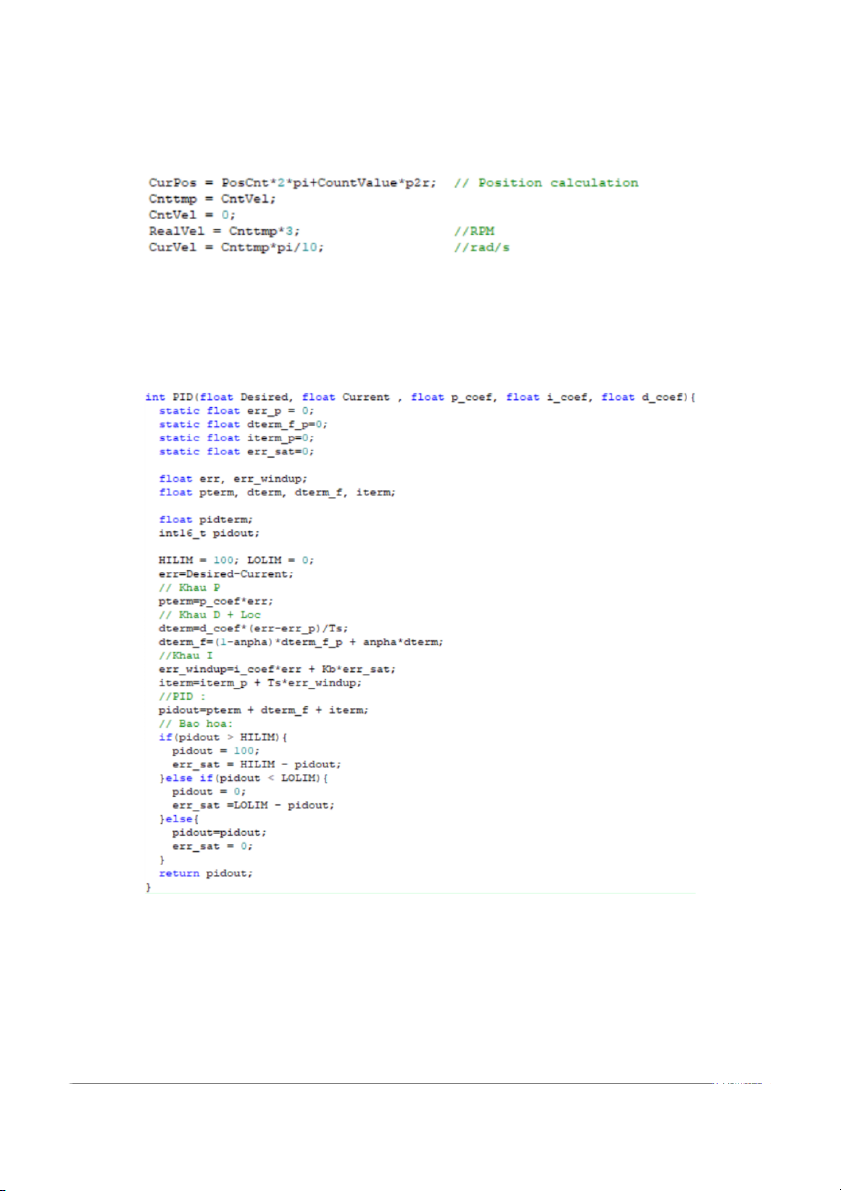
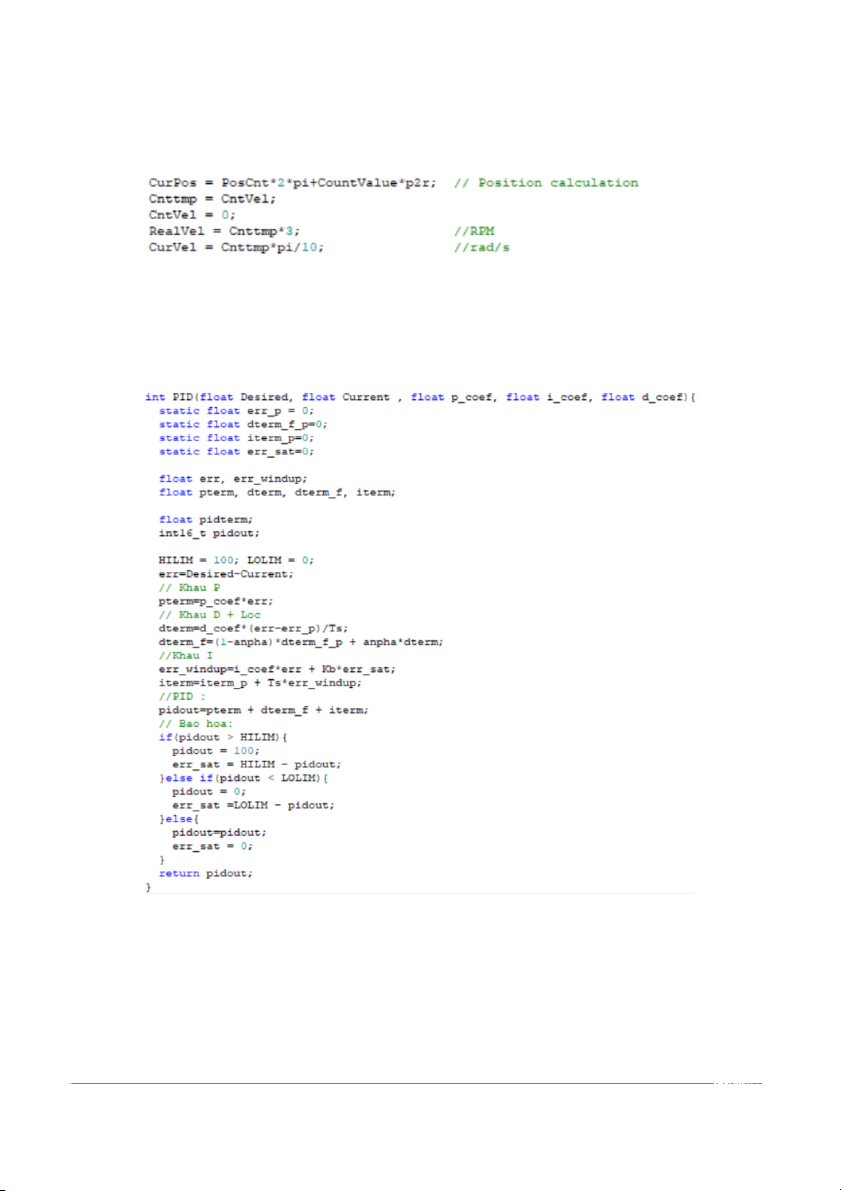
- Tính toán vận tốc trả về từ xung trả về của encoder
Sử dụng ngắt timer(TIMER 4) 5ms đọc tín hiệu trả từ Encoder để tính toán vận tốc
và vị trí của động cơ: Code:
Hình 8: Lấy tín hiệu đọc được từ Encoder để tính toán các giá trị vận tốc và vị trí
- Tiến hành viết hàm PD để điều khiển vận tốc động cơ Code:
Hình 9: Hàm PID điều khiển vận tốc
- Sử dụng phần mềm STM32CubeMonitor để giám sát mối quan hệ giữa giá trị đặt
và giá trị thực tế của vận tốc
IV. Kết quả đạt được và nhận xét
Kết quả đạt được
Hình 10: Biểu đồ biểu diễn mối quan hệ giữa vận tốc đặt và giá trị thực tế Nhận xét:
- Qua biểu đồ trên ta thấy:
+ Mặc dù đã áp dụng bộ lọc cho bộ điều khiển PID nhưng đáp ứng của hệ thống
chưa tốt lắm do thông số PD chưa được chính xác. Cần phải điều chỉnh thêm. + Sai số còn lớn
- Encoder có bị nhiễu/ lỗi. Mặc dù trong khoảng thời gian từ 0->2s động cơ chưa
được cung cấp điện nhưng Encoder vẫn trả xung về.
- Mạch nạp St- Link đôi lúc bị lỗi không nạp được
BÀI THỰC HÀNH SỐ 2: ĐIỀU KHIỂN VỊ TRÍ ĐỘNG CƠ DC SERVO SỬ
DỤNG VI ĐIỂU KHIỂN STM32 I . Mục tiêu
- Áp dụng kiến thức đã học trong môn Hệ thống Servo để điều khiển vị trí động cơ
DC Servo thông qua hệ thống vít me sử dụng vi điều khiển STM32F103RX
- Biểu diễn mối quan hệ giữa vị trí đặt và vị trí thực tế sử lên màn hình giám sát sử
dụng phần mềm STM32F103RX
II . Phần cứng thiết bị
Hình 1: Hệ thống Servo một trục sử dụng động cơ DC và Encoder 2.1 Động cơ DC
Bảng đặc tính của động cơ: - Thông số của tải:
+ Khối lượng: m=0.81774 kg + Chất liệu: Thép CT3
+ Đường kính trục: R= 0.025m
Do vậy, moment quán tính của tải là : 1 1 2 2 4− 2 J = mr = 0.81774 0.025= 2.56 10 [kg.m L 2 2 2.2 Encoder
- Sử dụng Encoder để xác định vận tốc và vị trí của động cơ thông qua số xung trả
về. Trong thực tế có rất nhiều chế độ đọc Encoder, tuy nhiên trong thí nghiệm này
chúng ta đọc ở chế độ 4X để đạt được độ chính xác cao nhất .
- Encoder được sử dụng trong thí nghiệm này có độ phân giải là 500 xung/ vòng
2.3 Mạch cầu H
- Dùng làm mạch công suất cung cấp năng lượng làm quay động cơ.
Hình 2: Mạch cầu H và sơ đồ chân
2.4 Sơ đồ kết nối
a. Kết nối phần cứn g :
Hình 3: Sơ đồ kết nối phần cứng thiết bị b. Board STM32F103RX Hình 4: Board STM32F103RX
Hình 5: Sơ đồ chân I/O STM32F103RX
III . Tiến hành thí nghiệm
- Cấu hình chân như sơ đồ phần cứng
- Tiến hành viết hàm đọc encoder đọc chế độ 4X + Đọc tín hiệu từ k ênh A (PC3)
Hình 6: Đọc tín hiệu từ Encoder sử dụng chân ngắt ngoài PC3
+ Đọc tín hiệu từ kênh B (PC7):
Hình 7: Đọc tín hiệu từ Encoder sử dụng chân ngắt ngoài PC7
- Tính toán vận tốc trả về từ xung trả về của encoder
Sử dụng ngắt timer(TIMER 4) 5ms đọc tín hiệu trả từ Encoder để tính toán vận tốc
và vị trí của động cơ: Code:
Hình 8: Lấy tín hiệu đọc được từ Encoder để tính toán các giá trị vận tốc và vị trí
- Tiến hành viết hàm PD để điều khiển vị trí Code:
Hình 9: Hàm PID điều khiển vị trí
- Sử dụng phần mềm STM32CubeMonitor để giám sát mối quan hệ giữa giá trị đặt
và giá trị thực tế của vị trí.
IV . Kết quả đạt được và nhận xét
Kết quả đạt được Nhận xét:
- ST-link bị lỗi nhiều khiến cho quá trình nạp rất khó khăn.
BÀI THỰC HÀNH SỐ 3: HỆ THỐNG SERVO ĐA TRỤC SỬ DỤNG ĐỘNG
CƠ AC SERVO VÀ MODULE ĐIỀU KHIỂN CHUYỂN ĐỘNG
I . Cơ sở lí thuyết
Nội dung thí nghiệm
• Động cơ AC servo và driver
• Lập trình PLC Mitsubishi
• Bộ điều khiển chuyển động FX3U-20SSC-H
• Nội suy tuyến tính và hình tròn
II . Giới thiệu hệ thống - Phần cứng
Hình 1: Hệ thống servo 3 trục sử dụng mô-đun Mitsubishi Hình :
2 Bộ điều khiển của hệ thống 1: Main CB 2: PLC Mitsubishi 3: Module FX3U-20SSC-H 4,5: Servo Driver (MR-J3-B) 6: Relays 7: Nguồn 24VDC, 10A
- Điều khiển 2 trục FX3U-20SSC-H
FX3U-20SSC-H: Là khối chức năng đặc biệt dùng để điều khiển vị trí, tốc độ của
động cơ AC servo thông qua cấp SSCNETIII, tương thích với AC servo MR-J3-B. Nó
có thế điều khiển tối đa 2 động cơ AC servo với nội suy đường thẳng và đường tròn
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 575 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445