Đề thi cuối kỳ học kỳ 1 năm học 18-19 môn: hệ thống truyền động Servo | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Bài 1: (4đ) Cho động cơ bước lưỡng cực (bipolar), góc bước a = 1.80, có đường đặc tính như hình 1a. a. Đường đặc tính mô tả đặc điểm gì của động cơ? Giải thích vắn tắt. b. Theo hình, vận tốc khởi động tối đa của động cơ bằng bao nhiêu (rad/s)? c. Cho bảng thứ tự pha của động cơ như hình 1b. Vẽ kết nối phần cứng và điều khiển động cơ với vận tốc như câu b. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: hệ thống truyền động (ME3145) 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:
Preview text:
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT ĐỀ THI CUỐI KỲ HỌC KỲ 1, 8- NĂM HỌC 1 19 THÀNH PHỐ HỒ CHÍ MINH
Môn: HỆ THỐNG TRUYỀN ĐỘNG SERVO KHOA CƠ KHÍ CHẾ TẠO MÁY
Mã môn học: SERV424029
Đề số: 01; Đề thi có 2 trang.
BỘ MÔN CƠ ĐIỆN TỬ
Thời gian: 75 phút.
-------------------------
Được phép sử dụng tài liệu
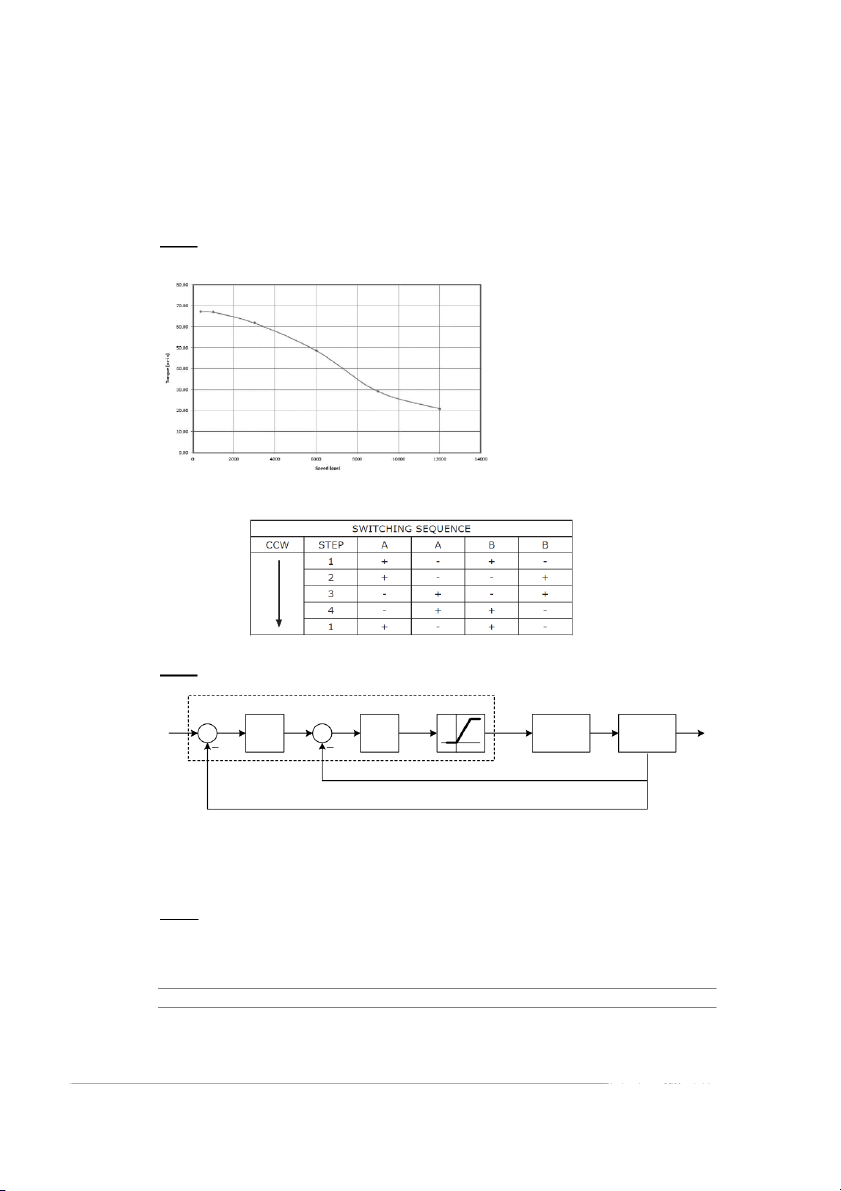
Bài 1: (4đ) Cho động cơ bước lưỡng cực (bipolar), góc bước 0
= 1.8 , có đường đặc tính như hình 1a
a. Đường đặc tính mô tả đặc
điểm gì của động cơ? Giải thích vắn tắt.
b. Theo hình, vận tốc khởi
động tối đa của động cơ bằng bao nhiêu (rad/s)?
c. Cho bảng thứ tự pha của
động cơ như hình 1b. Vẽ kết
nối phần cứng và điều khiển
động cơ với vận tốc như câu b. Hình 1a Hình 1b Bài 2: (4đ)
Cho sơ đồ khối bộ điều khiển vị trí/vận tốc động cơ DC servo như hì nh: vi điều khiển PWM P PI H-bridge DC servo velocity loop position loop
a. Biết encoder có độ phân giải 1000 (CPR), viết giải thuật đọc encoder với chế độ x2 và
reset bộ đếm khi động cơ quay đủ 1 vòng?
b. Viết thuật toán điều khiển vận tốc động cơ có sử dụng anti-windup ở dãi tốc độ trung
bình? Biết tốc độ danh định (rated speed) của động cơ là 3000 RPM.
Bài 3: (2đ) Sử dụng giải thuật DS để nội suy 1 cung tròn ở góc phần tư I, theo cùng chiều
kim đồng hồ (CW), R=5.
a. Lập bảng tính các giá trị cần thiết theo lưu đồ giải thuật?
b. Vẽ kết quả chạy được theo bảng câu a ?
Ghi chú: Cán bộ coi thi không được giải thích đề thi.
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
Chuẩn đầu ra của học phần (về kiến thức) Nội dung kiểm tra
[G 1.1]: Vẽ được sơ đồ cấu tạo tổng quát của các hệ thống
servo trong công nghiệp, điển hình là: tay máy, máy CNC
[G 1.2]: Giải thích được nguyên lý hoạt động và các vấn
đề điều khiển liên quan. Câu1, Câu 2a, 2b
[G 3.2]: Hiểu được các thuật ngữ tiếng Anh dùng trong hệ
thống điều khiển quá trình
[G 2.1]: Hiểu rõ thuật toán thường dùng để điều khiển vận
tốc, vị trí của động cơ Câu 2c
[G 2.2]: Phân tích được các yếu tố liên quan ảnh hưởng
đến quá trình điều khiển
[G 4.1]: Thiết kế bộ điều khiển cho một cơ cấu servo điển hình. Câu 2, Câu 3
[G 4.2]: Lập lưu đồ giải thuật, viết chương trình điều khiển
quỹ đạo di chuyển bằng các giải thuật nội suy Ngày tháng năm Thông qua bộ môn
Số hiệu: BM1/QT-PĐBCL-RĐTV 1
Tài liệu liên quan:
-

Đồ án Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
115 58 -

Đề thi cuối học kì 2 Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
103 52 -

Đề thi cuối kì Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
139 70 -

Thiết Kế Hệ Thống Truyền Động | Môn Hệ thống truyền động - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
136 68 -

Hệ thống truyền động Servo | Môn Hệ thống truyền động - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
126 63