Đo mực nước hiển thị lên web online sử dụng cảm biến siêu âm có buzzer cảnh báo đầy | Môn Hệ thống nhúng trong công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Mức là chiều cao điền đầy các chất lỏng hay hạt có tiết diện không thay đổi. Là tham số quan trọng cần xác định để giám sát chế độ làm việc của các thiết bị, của các quá trình sản xuất. Tài liệu được sưu tầm gồm 46 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Hệ thống nhúng trong công nghiệp 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:









Preview text:
lOMoAR cPSD| 58702377
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ BÁO CÁO CUỐI KỲ
Môn học: THỰC TẬP THIẾT KẾ
HỆ THỐNG NHÚNG TRONG CÔNG NGHIỆP
ĐO MỰC NƯỚC HIỂN THỊ LÊN WEB ONLINE SỬ DỤNG CẢM
BIẾN SIÊU ÂM CÓ BUZZER CẢNH BÁO ĐẦY
MÃ SỐ LỚP HP: 05CLC (Sáng thứ 2, tiết 1-5)
GVHD: TS. Nguyễn Thanh Nghĩa
NHÓM SINH VIÊN THỰC HIỆN: STT Họ và tên MSSV 1 Lê Hoài Lâm 20161220 2 Bùi Khánh Hưng 21161319 3 Huỳnh Nhật Thông 21161084
TP.HỒ CHÍ MINH – THÁNG 3 NĂM 2024 lOMoAR cPSD| 58702377 NHẬN XÉT CỦA GIÁO VIÊN
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
..................................................................................................................................................................
Điểm: …………………………….. KÝ TÊN lOMoAR cPSD| 58702377 DANH MỤC HÌNH ẢNH
Hình 2.1: Ống thủy tinh chia vạch đựng chất lỏng..............................................................4
Hình 2.2: Các cảm biến đo mức chất lỏng trong bồn chứa.................................................6
Hình 2.3: Vùng hoạt động của cảm biến siêu âm................................................................7
Hình 2.4: Đo mức bằng sóng siêu âm.................................................................................7
Hình 2.5: Chu kỳ đọc xung của cảm biến siêu âm..............................................................8
Hình 2.6: Sự lan truyền sóng âm của cảm biến siêu âm......................................................8
Hình 2.7: Mạch ứng dụng đo mức của cảm biến siêu âm trong công nghiệp......................9
Hình 2.8: Raspberry Pi 4 Model B....................................................................................10
Hình 2.9: Cấu trúc phần cứng của Raspberry Pi 4 Model B.............................................11
Hình 2.10: Cấu hình chân Raspberry Pi 4 Model B..........................................................13
Hình 2.11: Các chi tiết phần cứng của Adruino Uno R3...................................................14
Hình 2.12: Chi tiết các chân của Arduino Uno R3............................................................17
Hình 2.13: Buzzer Modul Low Level Trigger..................................................................18
Hình 2.14: Cảm biến siêu âm HC – SR05.........................................................................19
Hình 2.15: Led RYG đèn giao thông................................................................................20
Hình 2.16: Giao tiếp thông qua USB giữa Arduino và Raspberry Pi................................21
Hình 2.17: Giao tiếp UART giữa Raspberry Pi và Arduino Uno......................................22
Hình 3.1: Sơ đồ khối của hệ thống....................................................................................28
Hình 3.3: Sơ đồ nguyên lý của hệ thống...........................................................................29
DANH MỤC BẢNG BIỂU
Bảng 2.1: Bảng thông số kỹ thuật của Raspberry Pi 4 Model B.......................................11
Bảng 2.2: Thông số kỹ thuật của Arduino Uno R3 ............................................................ 21
Bảng 2.3: Thông số kỹ thuật của Buzzer ........................................................................... 24
Bảng 2.4: Thông số các chân của Buzzer .......................................................................... 24
Bảng 2.6: Thông số kỹ thuật của cảm biến siêu âm HC – SR05.......................................19
Bảng 2.7: Thông số các chân của cảm biến siêu âm HC – SR05......................................19
Bảng 2.8: Thông số kỹ thuật đèn RYG.............................................................................20
Bảng 2.9: Thông số các chân của LED RYG....................................................................20 lOMoAR cPSD| 58702377 MỤC LỤC
NHẬN XÉT CỦA GIÁO VIÊN..........................................................................................i
DANH MỤC HÌNH ẢNH..................................................................................................ii
MỤC LỤC.........................................................................................................................iv
CHƯƠNG 1: TỔNG QUAN..............................................................................................1
1.1. LÝ DO CHỌN ĐỀ TÀI...........................................................................................1
1.3. NHIỆM VỤ NGHIÊN CỨU....................................................................................2
1.4. ĐỐI TƯỢNG VÀ PHẠM VI NGHIÊN CỨU.........................................................2
1.4.1. Đối tượng..........................................................................................................2
1.5 . BỐ CỤC BÁO CÁO...............................................................................................3
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT...................................................................................4
2.1 KHÁI NIỆM VỀ VIỆC ĐO MỨC CHẤT LỎNG VÀ DUNG TÍCH CHỨA...........4
2.1.1. Khái niệm về đo mức chất lỏng.........................................................................4
2.1.2. Cách đo........................................................................................................4
2.2. KHÁI NIỆM VỀ SỰ LAN TRUYỀN SÓNG ÂM...................................................7
2.2.1. Khái niệm..........................................................................................................7
2.2.2. Nguyên lý vận hành cảm biến siêu âm để đo mức............................................7
2.3. GIỚI THIỆU PHẦN CỨNG..................................................................................10
2.3.1. Raspberry Pi 4 Model B..................................................................................10
2.3.2. Arduino Uno R3..............................................................................................14
2.3.3. Buzzer Modul Low Level Trigger...................................................................18
2.3.4. Cảm biến siêu âm HC-SR05...........................................................................19
2.3.5. Led RYG giao thông.......................................................................................20
2.4. CÁC CHUẨN TRUYỀN DỮ LIỆU......................................................................21
2.4.1. Truyền nhận dữ liệu thông qua USB...............................................................21
2.4.1. Truyền dữ liệu thông qua UART....................................................................22
2.5. TRANG WEB HIỂN THỊ - GOOGLE FIREBASE...............................................23
2.5.1. Khái niệm và ứng dụng...................................................................................23
2.5.2. Cách thiết lập giao diện Google Firebase........................................................23
CHƯƠNG 3: THIẾT KẾ XÂY DỰNG VÀ THỰC THI HỆ THỐNG.............................28
3.1. YÊU CẦU VÀ SƠ ĐỒ KHỐI CỦA HỆ THỐNG.................................................28
3.1.1. Yêu cầu hệ thống.............................................................................................28 lOMoAR cPSD| 58702377
3.1.2. Sơ đồ khối và chức năng mỗi khối..................................................................28
3.1.3. Hoạt động của hệ thống...................................................................................29
3.2. SƠ ĐỒ NGUYÊN LÝ CỦA HỆ THỐNG.............................................................29
3.3. THỰC THI HỆ THỐNG........................................................................................30
3.4. KẾT QUẢ HOẠT ĐỘNG......................................................................................33
CHƯƠNG 4: KẾT QUẢ VẦ HƯỚNG PHÁT TRIỂN.....................................................37
4.1. KẾT LUẬN...........................................................................................................37
4.2. HẠN CHẾ..............................................................................................................37
4.3. HƯỚNG PHÁT TRIỂN.........................................................................................37
KẾT LUẬN......................................................................................................................38
TÀI LIỆU THAM KHẢO................................................................................................39
PHỤ LỤC.........................................................................................................................40 lOMoAR cPSD| 58702377 CHƯƠNG 1:
CHƯƠNG 2: TỔNG QUAN
1.1. LÝ DO CHỌN ĐỀ TÀI
Việc kiểm soát mức chất lỏng trong bồn chứa là một nhu cầu thiết yếu trong nhiều
ứng dụng từ hộ gia đình đến doanh nghiệp và ngành công nghiệp. Việc sử dụng cảm biến
siêu âm để đo mức chất lỏng không chỉ đem lại tính chính xác cao mà còn tiết kiệm thời
gian và công sức so với các phương pháp truyền thống, cũng như tiện lợi hơn nhất là trong những bồn kín.
Bên cạnh đó, việc truyền dữ liệu lên web và hiển thị thông tin trực tuyến mang lại
tính linh hoạt và tiện lợi cho người dùng. Điều này cho phép dễ dàng theo dõi mức nước từ
xa và thậm chí đưa ra các quyết định phù hợp. Sự tích hợp của buzzer cảnh báo khi mức
nước đạt đến mức đầy cũng là một tính năng hữu ích, báo cho người sử dụng biết khi bồn
đầy tránh trường hợp quá dung tích, gây tràn và ảnh hưởng tới mục đích của người dùng.
Nên vì thế nhóm em chọn đề tài “Đo mức nước hiển thị lên web online sử dụng cảm
biến siêu âm có buzzer cảnh báo đầy” làm đề tài báo cáo cuối kỳ của mình.
1.2. MỤC TIÊU NGHIÊN CỨU
Mục đích của việc thực hiện đề tài này là để đáp ứng yêu cầu của môn học và hoàn
thành chương trình học. Chúng em mong muốn áp dụng kiến thức đã học vào thực tế thông
qua nghiên cứu đề tài này. Đồng thời, đây cũng là một cơ hội để chúng em tích luỹ kinh
nghiệm cho việc thực hiện các đồ án trong tương lai.
Quá trình nghiên cứu đề tài cũng mang đến cho chúng em cơ hội kiểm tra lại kiến
thức đã học trong suốt thời gian học. Nghiên cứu cơ sở lý thuyết về Raspberry Pi, Arduino
Uno, cảm biến siêu âm HC-SR05, Buzzer, led…
Nghiên cứu, thực hành những thao tác kĩ thuật hàn và các kĩ thuật điện tử cơ bản
(mô phỏng, viết phần mềm chương trình …)
Khi nghiên cứu tạo ra được sản phẩm có ích cho đời sống, xã hội, có độ chính xác xấp xỉ. lOMoAR cPSD| 58702377
1.3. NHIỆM VỤ NGHIÊN CỨU
Đề tài tập trung nghiên cứu về ứng dụng đo mức nước từ cảm biến siêu âm từ
Arduino, thông qua giao tiếp Serial giữa Arduino và Raspberry Pi dữ liệu sẽ được Raspberry
Pi đưa lên Webserver (Firebase) để hiển thị mức nước1.
1.4. ĐỐI TƯỢNG VÀ PHẠM VI NGHIÊN CỨU 1.4.1. Đối tượng Về phần cứng bao gồm: - Raspberry Pi 4 - Arduino Uno R3 -
Cảm biến siêu âm HC-SR05 - Buzzer -
Modul 3 led đèn giao thông RYB Về phần mềm: -
Nghiên cứu ngôn ngữ Python để lập trình tác vụ nhận dữ liệu từ thông
qua giaotiếp Serial giữa Raspberry Pi và Arduino Uno sau đó chuyển dữ liệu lên Firebase hiển thị. -
Nghiên cứu ngôn ngữ C++ để lập trình Arduino Uno đo mức nước
thông qua cảmbiến siêu âm HC-SR05 và cài đặt ngưỡng để led sáng báo khi gần đầy
và khi ở mức thấp, kèm theo buzzer cảnh báo đầy.
1.4.2. Phạm vi nghiên cứu -
Vì đây là dự án nhỏ nên khoảng đo mức nước chỉ tầm từ dưới 17 cm -
Chỉ hiển thị mức nước đo được lên Firebase theo chu trình
Cảm biến siêu âm => Arduino Uno => Raspberry Pi 4 => Firebase -
Sử dụng Raspberry Pi 4, Arduino Uno R3, cảm biến siêu âm HC-
SR05, led RYB,Buzzer Modul Low. lOMoAR cPSD| 58702377 - Độ sai số < 0,9 cm.
1.5 . BỐ CỤC BÁO CÁO
Chương 1: Tổng quan: Trong chương này, chúng ta sẽ trình bày về tính cấp thiết của
đề tài, cũng như phân tích xu hướng và tình hình khoa học và công nghệ hiện nay. Sự phát
triển của ngành công nghiệp và nhu cầu phục vụ cuộc sống hàng ngày được xem là những
lý do quan trọng khi chọn đề tài và xác định mục tiêu nghiên cứu cho đề tài này.
Chương 2 : Cơ sở lý thuyết: Trình bày tổng quan về thành phần, đặc tính cũng như
chức năng của từng loại linh kiện ở phần cứng trong hệ thống, từ đó sẽ kết hợp lại để có
thể xây dựng nên một hệ thống hoàn chỉnh về mô hình.
Chương 3 : Thiết kế xây dựng và thực thi hệ thống: Từ yêu cầu của đề tài,ta thiết kế
sơ đồ cho hệ thống( Sơ đồ khối, Sơ đồ nguyên lý). Đưa ra các phương pháp xử lý và chỉnh
sửa từ đó thiết kế nên mô hình.
Chương 4 : Kết luận và hướng phát triển: Trình bày kết quả thực hiện của dự án.
Đề ra hướng khắc phục nhược điểm và phát triển thêm trong tương lai.
CHƯƠNG 3: CƠ SỞ LÝ THUYẾT
2.1 KHÁI NIỆM VỀ VIỆC ĐO MỨC CHẤT LỎNG VÀ DUNG TÍCH CHỨA
2.1.1. Khái niệm về đo mức chất lỏng
Mức là chiều cao điền đầy các chất lỏng hay hạt có tiết diện không thay đổi. Là tham
số quan trọng cần xác định để giám sát chế độ làm việc của các thiết bị, của các quá trình
sản xuất. Mặt khác đo được mức ta có thể tính được khối lượng của chất lỏng chứa trong
bồn ví dụ xăng, dầu. Đơn vị của mức là đơn vị chiều dài (m).
Đo mức có thể thực hiện đo liên tục hoặc đo theo ngưỡng. Đo liên tục là quá trình
đo trong đó tín hiệu đo cho biết thể tích của chất lưu còn lại trong bồn chứa, trong khi đo
theo ngưỡng, cảm biến đưa ra tín hiệu dưới dạng mã (nhị phân, hoặc ngưỡng điện áp) để
phát hiện trình trạng mức có đạt hay không để điều khiển quá trình làm việc của bồn chứa
(ví dụ đo mức dùng trong hệ thống bơm nước tự động). Còn ở bài báo cáo này ta sẽ sử dụng
đo mức để xác định chiều cao chất lỏng trong hũ nhựa. Trên thực tế, người ta sử dụng hai
phương pháp chính để đo mức là phương pháp thuỷ tĩnh và phương pháp điện. lOMoAR cPSD| 58702377 2.1.2. Cách đo
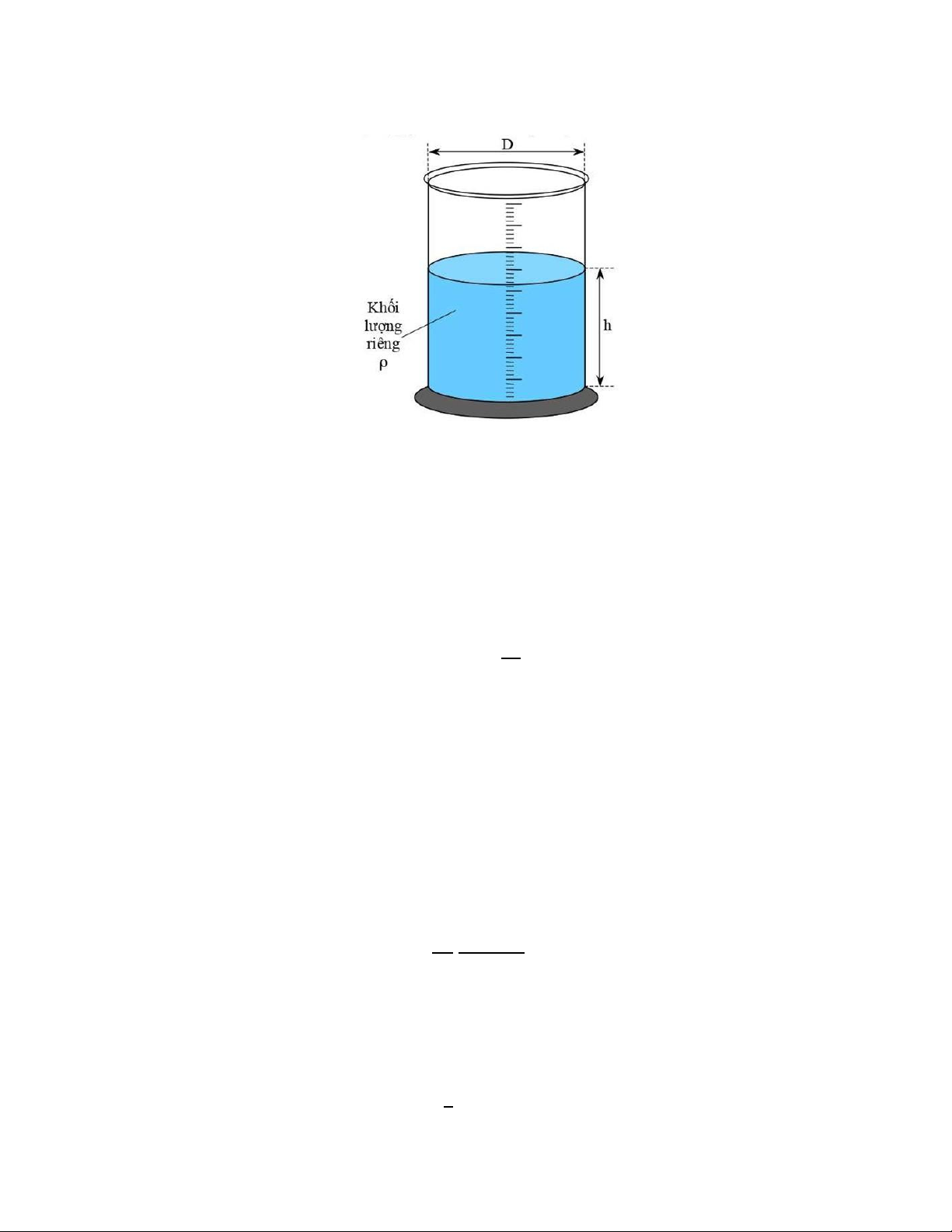
Hình 2.1: Ống thủy tinh chia vạch đựng chất lỏng
Đây là hình ảnh mô phỏng để đo mức chất lỏng cho một bồn, vật dụng lưu trữ…
Nếu vạch chia là thang đo chiều cao thì mức chất lỏng được chỉ thị và đọc trực tiếp trên
vạch chia. Nếu vạch chia là thang đo thể tích (lít, m3 hoặc cm3…) thì mức chất lỏng thông qua quan hệ: 4V h= 2 (2.1) π D
Đây là công thức tính khi ta có thể xác định được: Đường kính D của bồn, ống…
h là chiều cao thông qua vạch chia hoặc là dữ liệu từ cảm biến đo được.
Từ đó ta có thể tính được thể tích chất lỏng có trong bồn hoặc dung tích chứa toàn phần của bồn: V=hD2π (2.2) 4
Nếu dùng một phương pháp khác đo được áp suất khối chất lỏng P tại đáy bồn hoặc
ống thủy tinh và biết được khối lượng riêng của chất lỏng là ρ thì mức chất lỏng lại được
xác định thông qua quan hệ: P h= ρg (2.3) lOMoAR cPSD| 58702377
Vậy thể tích chứa trong ống thủy tinh, bồn chứa ta có thể tính được là:
V= P D2π (2.4) 4ρg
Trong đó: g là gia tốc trọng trường 9,8m/s2
Một cách khác nếu cân được khối chất lỏng có khối lượng là M thì mức chất lỏng
sẽ được xác định theo quan hệ:
M=ρV ⇒h= 4M2 (2.5) ρπ D
Từ đó ta có thể tính được thể tích chất lỏng có trong bồn chứa, ống chứa khi ta biết
khối lượng và khối lượng riêng của chất được chứa: M V= ρ (2.6)
Tương tự vậy, nếu biết lực tác động (trọng lượng) của khối chất lỏng tại đáy ống là F thì
ta cũng suy ra được chiều cao theo quan hệ và sau đó suy được thể tích chất lỏng.
F=Mg⇒h= 4F 2⇒V= 4F 2 (2.5) ρgπ D gρπ D
Như vậy, ta có thể thấy rằng trong thực tế đo mức chất lỏng và sau đó suy ra thể tích
chứa hay khối lượng bằng các công thức hình học tùy thuộc vào hình dạng vật chứa. Có
thể thực hiện nhiều phương pháp khác nhau thông qua các đại lượng vật lý khác nhau mà
có quan hệ trực tiếp với chiều cao, như là khối lượng, áp suất, khối lượng riêng, lực… Ở
bài báo cáo này em sẽ sử dụng các cảm biến quen thuộc và dễ hình dung và sử dụng cảm
biến siêu âm để đo chiều cao chất lỏng để xác định thể tích trong bồn từ đó có thể suy ra
được thể tích, khối lượng bằng các công thức nêu trên. Ngoài ra còn có thể đo bằng những
cảm biến radar, cảm biến laser và nhiều loại khác nữa. lOMoAR cPSD| 58702377
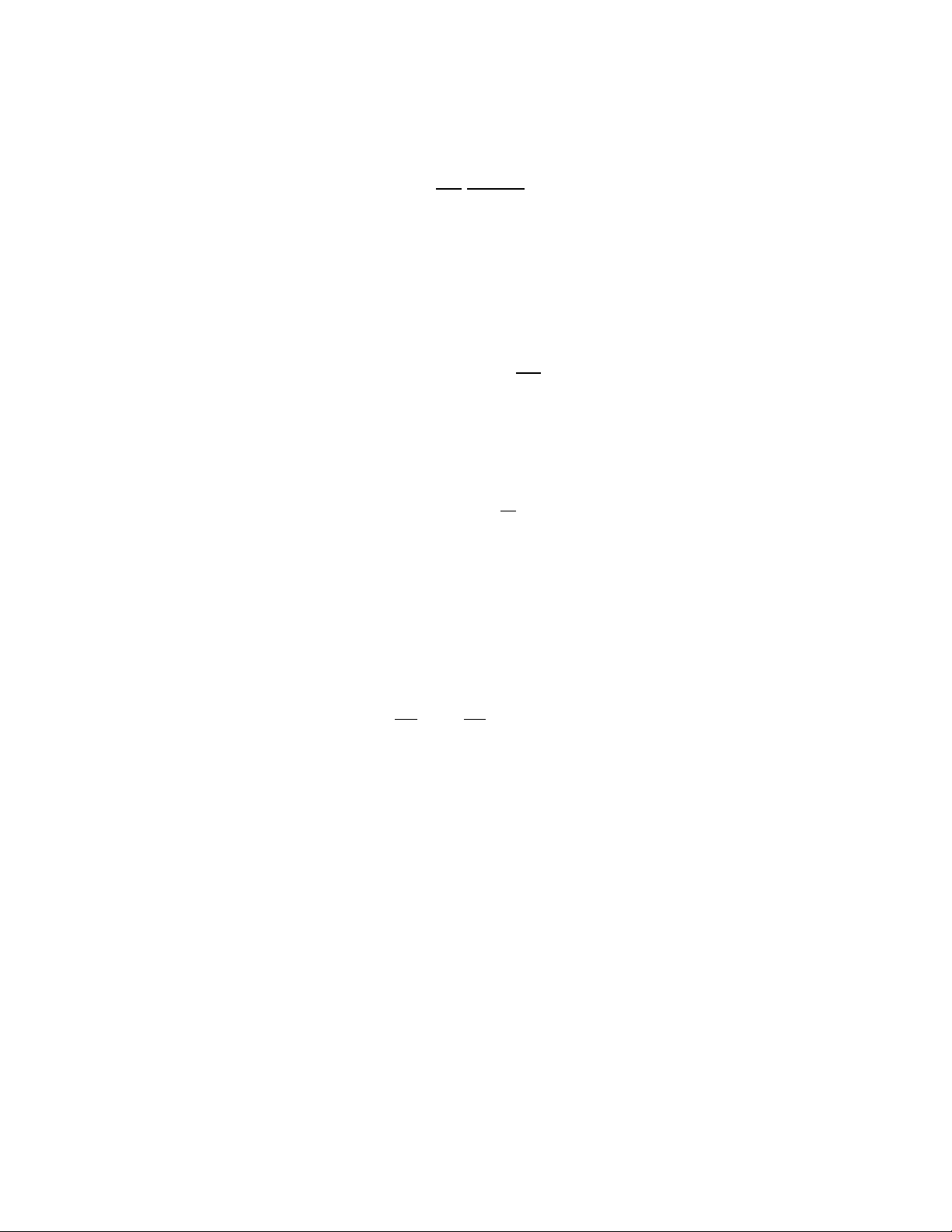
Hình 2.2: Các cảm biến đo mức chất lỏng trong bồn chứa
2.2. KHÁI NIỆM VỀ SỰ LAN TRUYỀN SÓNG ÂM 2.2.1. Khái niệm
Sóng siêu âm là sóng cơ học có tần số lớn hơn tầm số âm nghe thấy của con người
(trên 20Khz) có tốc độ lan truyền từ 300 - 1500m/s tuỳ theo môi trường truyền là không
khí, chất lỏng hay kim loại. Do đó ta có thể sử dụng sóng siêu âm để kiểm tra các khuyết
tật trong sản phẩm bằng kim loại, phi kim, đo độ sâu của đáy biển hoặc mức chất lỏng trong
bồn chứa từ đó có thể tính được dung tích chứa của vật thể thông qua số liệu đo được.
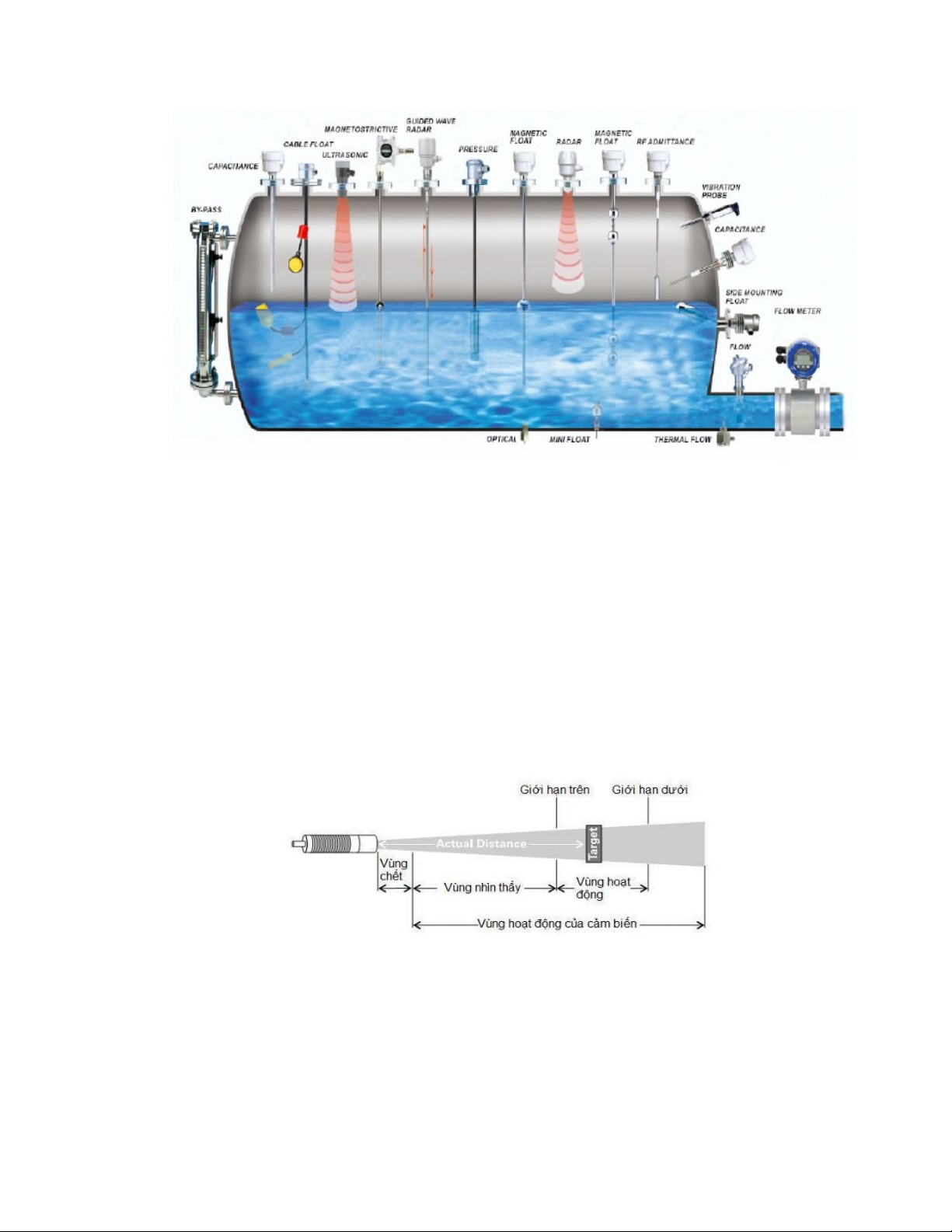
Hình 2.3: Vùng hoạt động của cảm biến siêu âm
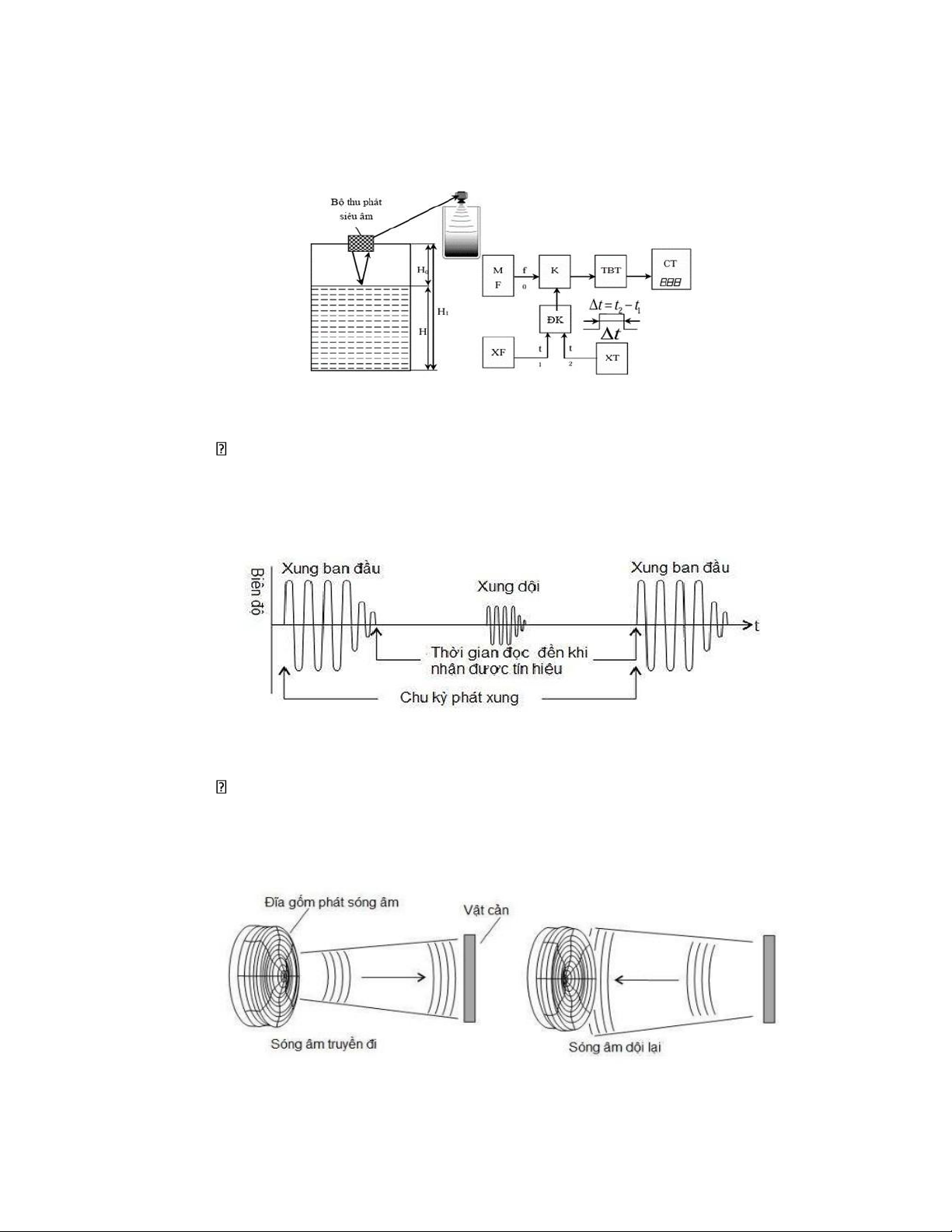
2.2.2. Nguyên lý vận hành cảm biến siêu âm để đo mức
Để đo mức chất lỏng trong các bồn chứa, người ta đặt cảm biến trên đỉnh của bồn.
Sóng siêu âm được phát dưới dạng xung tới bề mặt phân cách giữa hai môi trường không
khí và chất lỏng, sóng một phần được phản xạ trở lại một phần được truyền vào chất lỏng. lOMoAR cPSD| 58702377
Từ đó có thể xác định được dung tích chứa hoặc các thông số khác thông qua các công thức phần (2.1.2)
Hình 2.4: Đo mức bằng sóng siêu âm
Chu kỳ xung của cảm biến siêu âm
Trong một chu kỳ làm việc cảm biến sẽ đọc liên tục sóng dội về cho đến khi xung
dội về có biên độ bằng xung phát đi ban đầu sẽ kết thúc một chu kỳ thu nhận.
Hình 2.5: Chu kỳ đọc xung của cảm biến siêu âm
Sự lan truyền sóng âm
Một bộ phát sóng âm làm bằng đĩa gốm sứ sẽ phát sóng lan truyền trong không gian
đến khi gặp vật cản sẽ có sóng dội lại theo dạng hình nón. lOMoAR cPSD| 58702377
Hình 2.6: Sự lan truyền sóng âm của cảm biến siêu âm
Sóng phản xạ tới bộ thu đập vào bộ cộng hưởng sẽ gây ra sự rung động trên
khối rung được gắn với nó (tấm kim loại). Lớp vật liệu áp điện dính trên khối rung
sẽ rung theo, từ đó một dòng điện được sinh ra do tính cho chất của vật liệu gốm áp
điện. Dòng điện này được đưa ra mạch ngoài nhờ hai dây dẫn sẽ được chuyển đổi
thành tín hiệu điện. Khoảng thời gian từ lúc bắt đầu phát xung t1 tới thời điểm nhận
được xung t2 tỷ lệ với khoảng cách từ cảm biến đến bề mặt chất lỏng, qua đó xác định
được mức chất lỏng chứa trong bồn.
Bằng cách sử dụng nguyên lý TOF (Time of flight): là nguyên lý đo khoảng
cách bằng thời gian truyền của sóng. Phương pháp này được đặc biệt ứng dụng với
các thiết bị sử dụng sóng siêu âm do vận tốc di chuyển của sóng trong không khí và
trong các vật liệu khác tương đối chậm, và người ta có thể đo được khoảng cách với
sai số nhỏ (khoảng 343m/s trong không khí).
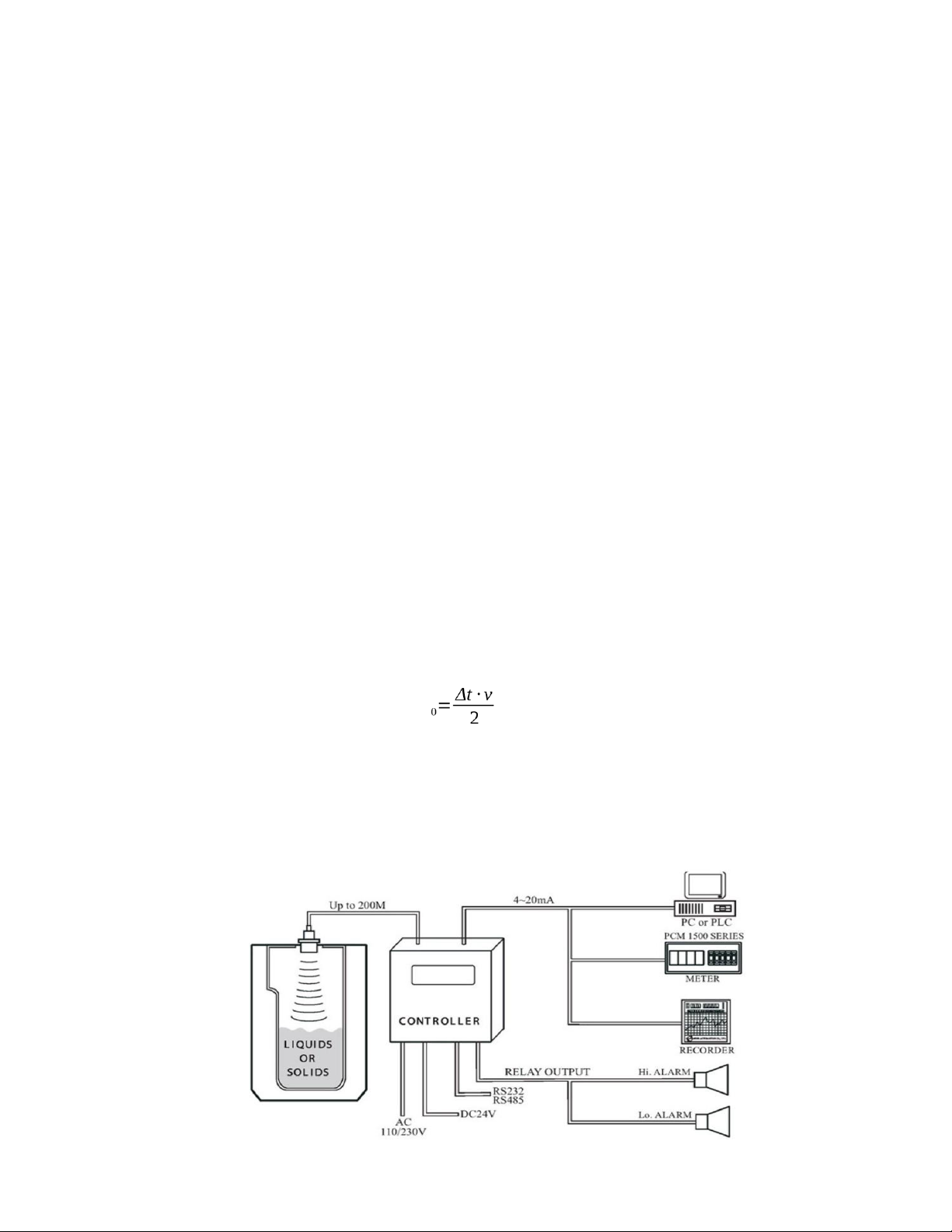
Nếu gọi H0 – là chiều cao khoảng không khí, H1 – là chiều cao của bồn chứa chất
lỏng thì mức chất lỏng H được xác định như sau: H (2.7)
Trong đó: v – vận tốc truyền sóng siêu âm trong không khí (v ≈ 331 ÷334 m ∕ s)
Δt=t2−t1 là khoảng thời gian tính từ thời điểm phát tới thời điểm nhận.
H=H1−H0 (2.8) lOMoAR cPSD| 58702377
Hình 2.7: Mạch ứng dụng đo mức của cảm biến siêu âm trong công nghiệp
Trong mạch đo ta có thể thấy cảm biến siêu âm nối trực tiếp vô bộ điều khiển là các
vi điều khiển công nghiệp với nguồn cấp vô là nguồn xoay chiều hoặc một chiều tùy theo
khả năng đáp ứng của địa điểm. Đầu ra bao gồm Relay Output kết nối 2 đèn để báo mức
chất lỏng trong bồn chứa, và bộ controller xử lý tín hiệu để chuyển dữ liệu đến máy tính
hoặc PLC tự động và các máy đo và bộ lưu trữ dữ liệu. Ngoài ra đầu ra còn có thể truyền
theo phương thức có dây cho các thiết bị qua các chuẩn RS232 và RS485.
Trong thực tế, ứng dụng của cảm biến siêu âm kết nối với các mạch ứng dụng rất phong phú.
2.3. GIỚI THIỆU PHẦN CỨNG
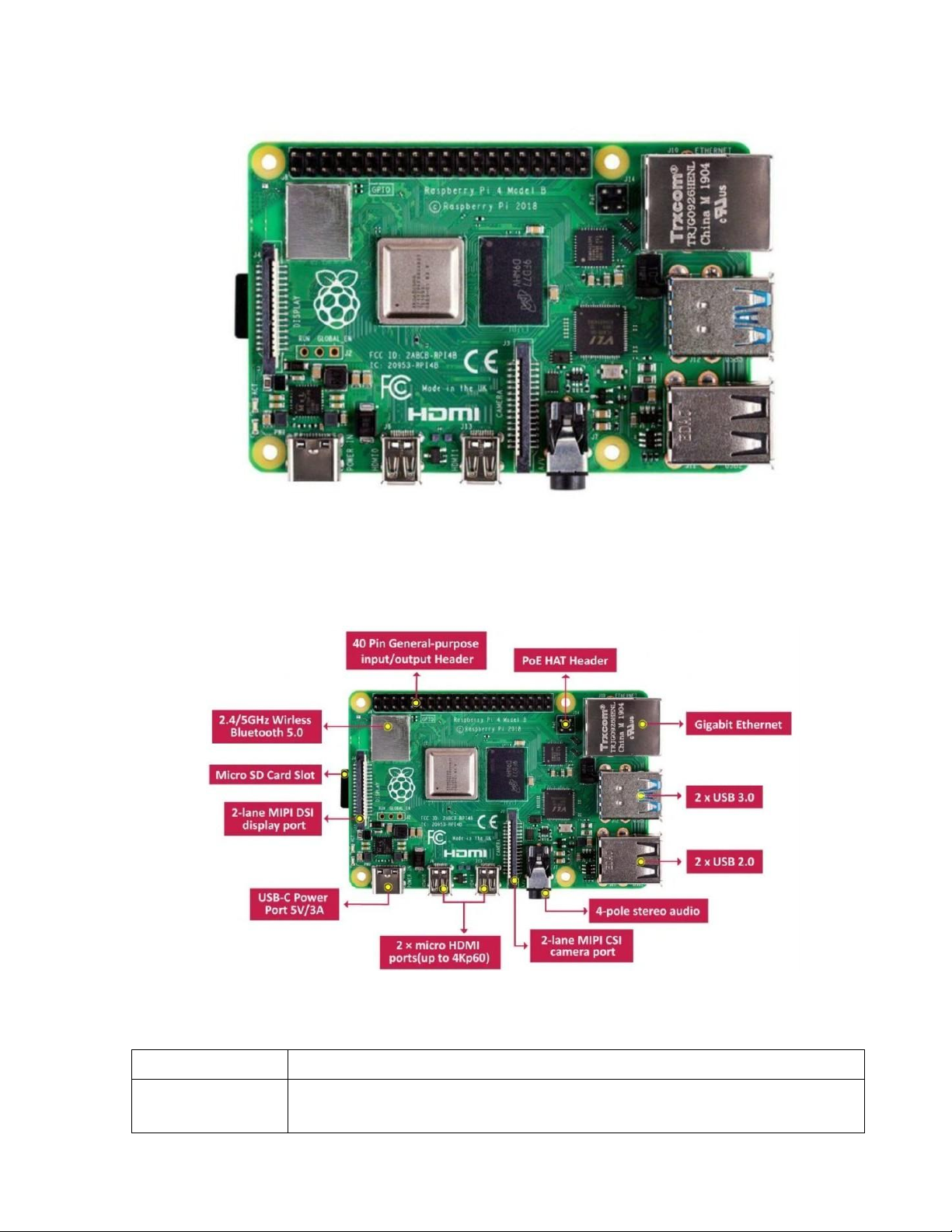
2.3.1. Raspberry Pi 4 Model B
Raspberry Pi 4 Model B là một trong những bo mạch máy tính đơn bo mạch nhỏ
(SBC) phổ biến nhất trên thị trường. Nó có giá cả phải chăng, kích thước nhỏ gọn và tiết
kiệm năng lượng (chỉ yêu cầu nguồn điện áp 5V). Raspberry Pi được phát triển bởi
Raspberry Pi Foundation với mục tiêu khuyến khích việc giảng dạy khoa học máy tính và lập trình nhúng.
Bo mạch bao gồm CPU, GPU, cổng USB và chân GPIO. Nó có thể chạy nhiều hệ
điều hành khác nhau, bao gồm Raspbian, một hệ điều hành dựa trên Linux được tối ưu hóa cho Raspberry Pi. lOMoAR cPSD| 58702377
Hình 2.8: Raspberry Pi 4 Model B
Raspberry Pi 4 Model B ra mắt tháng 6/2019 với nhiều nâng cấp rất đáng kể giúp
tăng hiệu năng của máy tính mini này lên tới 3x lần.
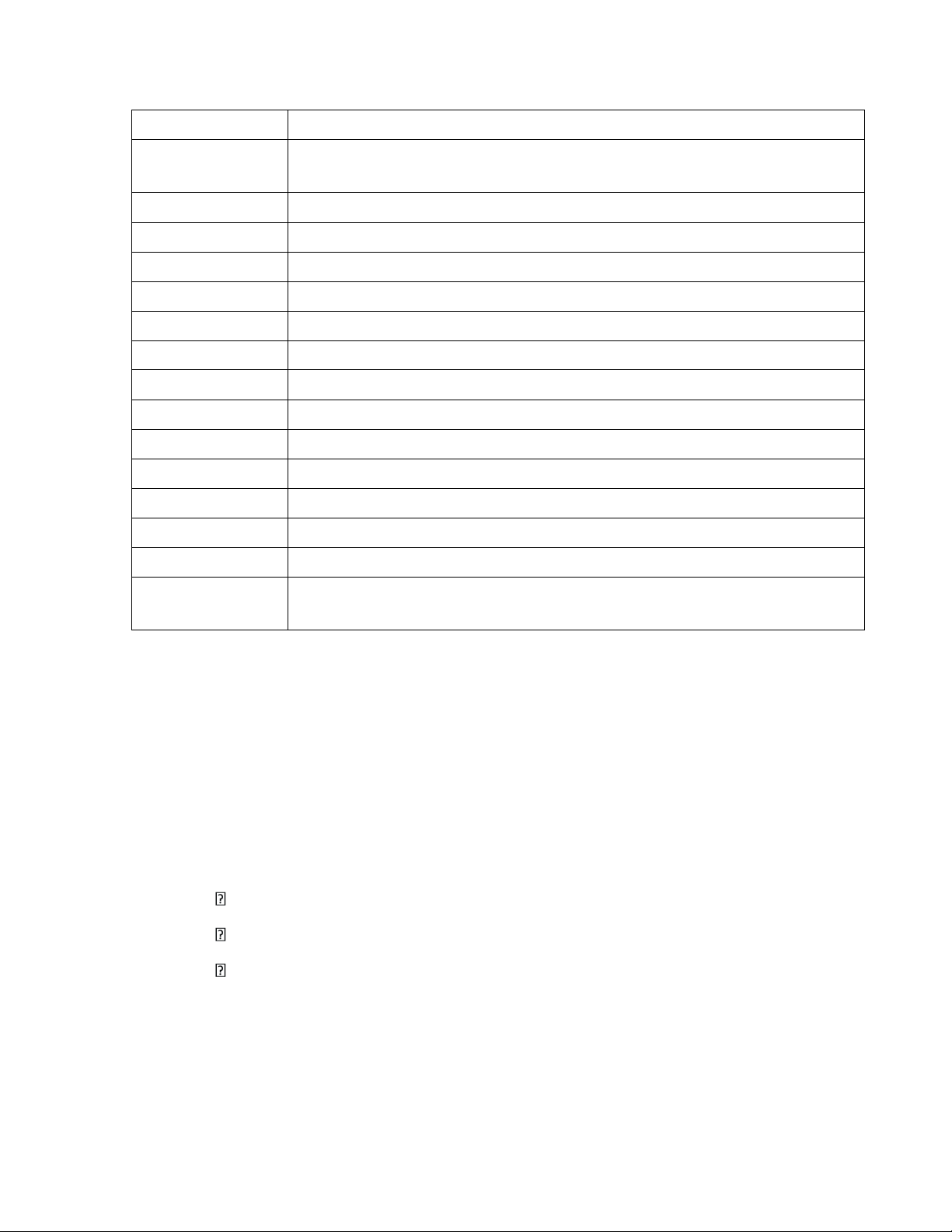
Hình 2.9: Cấu trúc phần cứng của Raspberry Pi 4 Model B Bảng 2.1:
Bảng thông số kỹ thuật của Raspberry Pi 4 Model B CPU
Quad-core Cortex-A72 (64-bit) @ 1.5GHz
H264 (1080p60 decode, 1080p30 encode) OpenGL ES 3.0 graphics, GPU H.265 (4kp60 decode) lOMoAR cPSD| 58702377 RAM 1GB, 2GB, 4GB.
Dải điện áp hoạt 5V với dòng tối thiểu 3A động CỔNG GPIO 28 chân I / O LAN Có PoE Cho phép WIFI Có Bluetooth 5.0 Thẻ SD Có HDMI
2 Cổng Màn hình 4k (mini-HDMI) PWR Exp Header Không có Nguồn cấp
Giắc cắm nguồn DC, Cổng USB-C mini
Kết nối mở rộng 40 chân (SPI, I 2 C, LCD, UART, PWM, SDIO) USB 2 × 2.0, 2 × 3.0 Máy ảnh CSI Display DSI Nhiệt độ hoạt 0-50 độ động
Hỗ trợ các giao thức hiện đại
Raspberry Pi 4 có nhiều hệ thống liên lạc hiện đại. Nó có WiFi bên trong và
Bluetooth để giao tiếp dữ liệu không dây. Có thể được sử dụng bên trong hệ thống ở bất cứ
đâu mà không có bất kỳ sự xung đột nào.
Pi chuyển đổi dữ liệu dễ dàng trong cùng một mạng do có WiFi. Thiết bị cũng có hỗ
trợ mạng LAN trong trường hợp không có WiFi và là mạng truyền thông có dây. LAN - Gigabyte Ethernet Bluetooth - 5.0
WiFi - 2.4 với tốc độ 5GHz
Tính năng giao diện HDMI Rpi
Trong các thiết bị Pi trước đây, chỉ có một cổng HDMI và có đồ họa thấp, nhưng
trong mẫu mới nhất có hai cổng HDMI mini có thể được sử dụng cùng lúc cho nhiều màn lOMoAR cPSD| 58702377
hình máy tính để bàn. Cả hai cổng đều cung cấp chế độ xem 4K ULTRA HD cho người dùng.
GPU SPECS - H264 (1080p60 decode, 1080p30 encode) OpenGL ES 3.0
graphics, H.265 (4kp60 decode). Ứng dụng: Máy chủ web
Hệ thống giải trí đa phương tiện Trạm thời tiết Robot
Đầu nối của nguồn điện là một phần cơ bản của board mạch và được sử dụng để
cung cấp nguồn 5 V cho bo mạch. Người dùng có thể sử dụng nguồn bất kỳ nào để thiết lập
nguồn cho board mạch, tuy nhiên nên ưu tiên kết nối cáp nguồn của board qua cổng USB
của laptop, máy tính để cung cấp nguồn 5V.
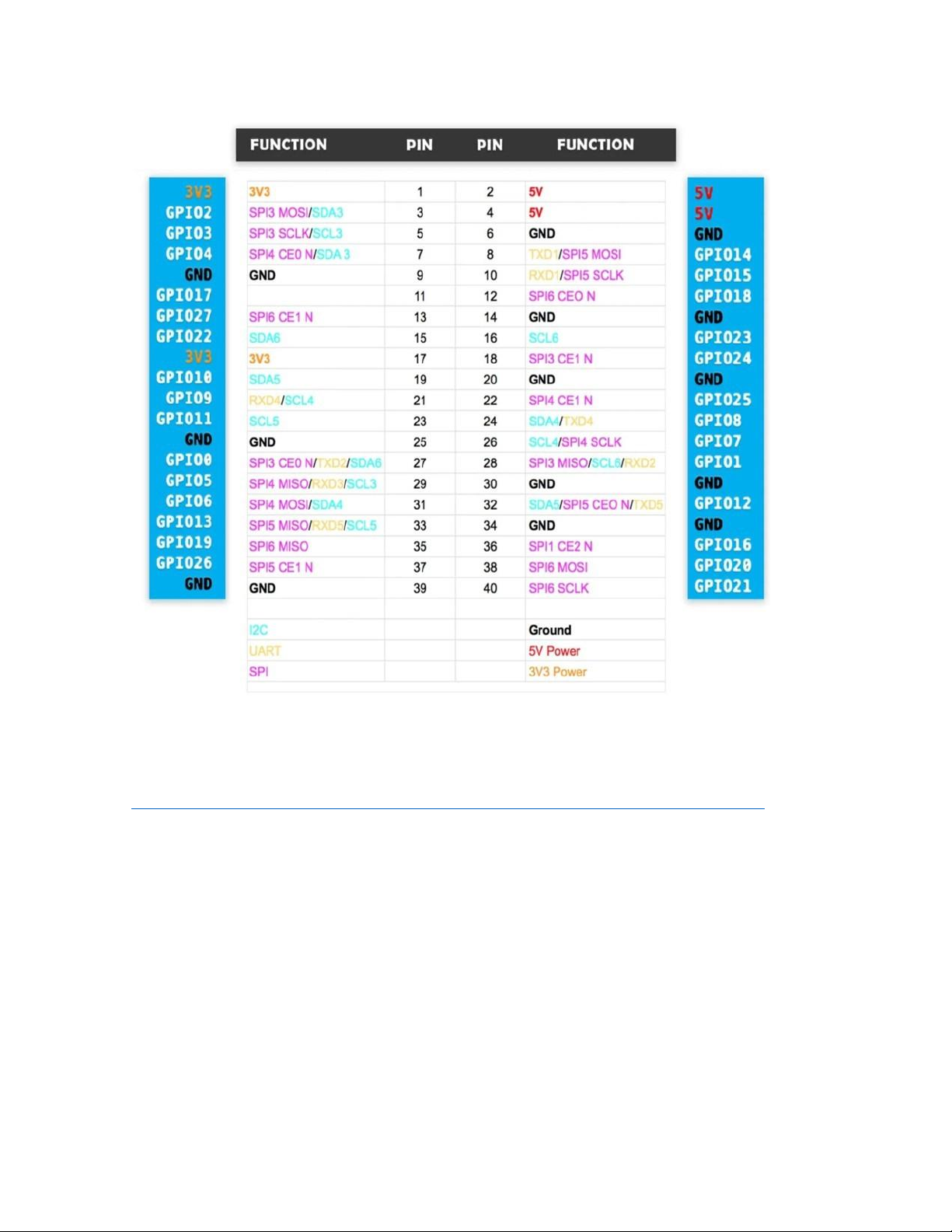
Raspberry Pi 4 có thể sử dụng trong hệ thống nhúng bên ngoài để giao tiếp tín hiệu.
Có tổng cộng 40 chân , trong đó 28 chân là chân GPIO và các chân còn lại là chân nguồn.
Các chân GPIO không chỉ thực hiện các chức năng I / O đơn giản mà còn hỗ trợ
giao thức UART, SPI và I2C. lOMoAR cPSD| 58702377
Hình 2.10: Cấu hình chân Raspberry Pi 4 Model B
Tham khảo sơ đồ nguyên lý tại:
https://datasheets.raspberrypi.com/rpi4/raspberry-pi-4-reduced-schematics.pdf 2.3.2. Arduino Uno R3
Arduino UNO là một bo mạch vi điều khiển dựa trênATmega328P. Nó có 14 chân
đầu vào/đầu ra kỹ thuật số (trong đó 6 chân có thể được sử dụng làm đầu ra PWM),
6 đầu vào analog, bộ cộng hưởng gốm 16 MHz, kết nối USB, giắc cắm nguồn, đầu ICSP và
nút đặt lại. Nó chứa mọi thứ cần thiết để hỗ trợ vi điều khiển; chỉ cần kết
nối nó với máy tính bằng cáp USB hoặc cấp nguồn cho nó bằng bộ chuyển đổi ACto-DC
hoặc pin để bắt đầu. Nhìn chung nó được thiết kế dễ sử dụng và phát triển, nó cung cấp lOMoAR cPSD| 58702377
một nền tảng lý tưởng cho người dùng muốn bắt đầu với các dự án điện tử cơ bản và phát
triển các ứng dụng phức tạp hơn.
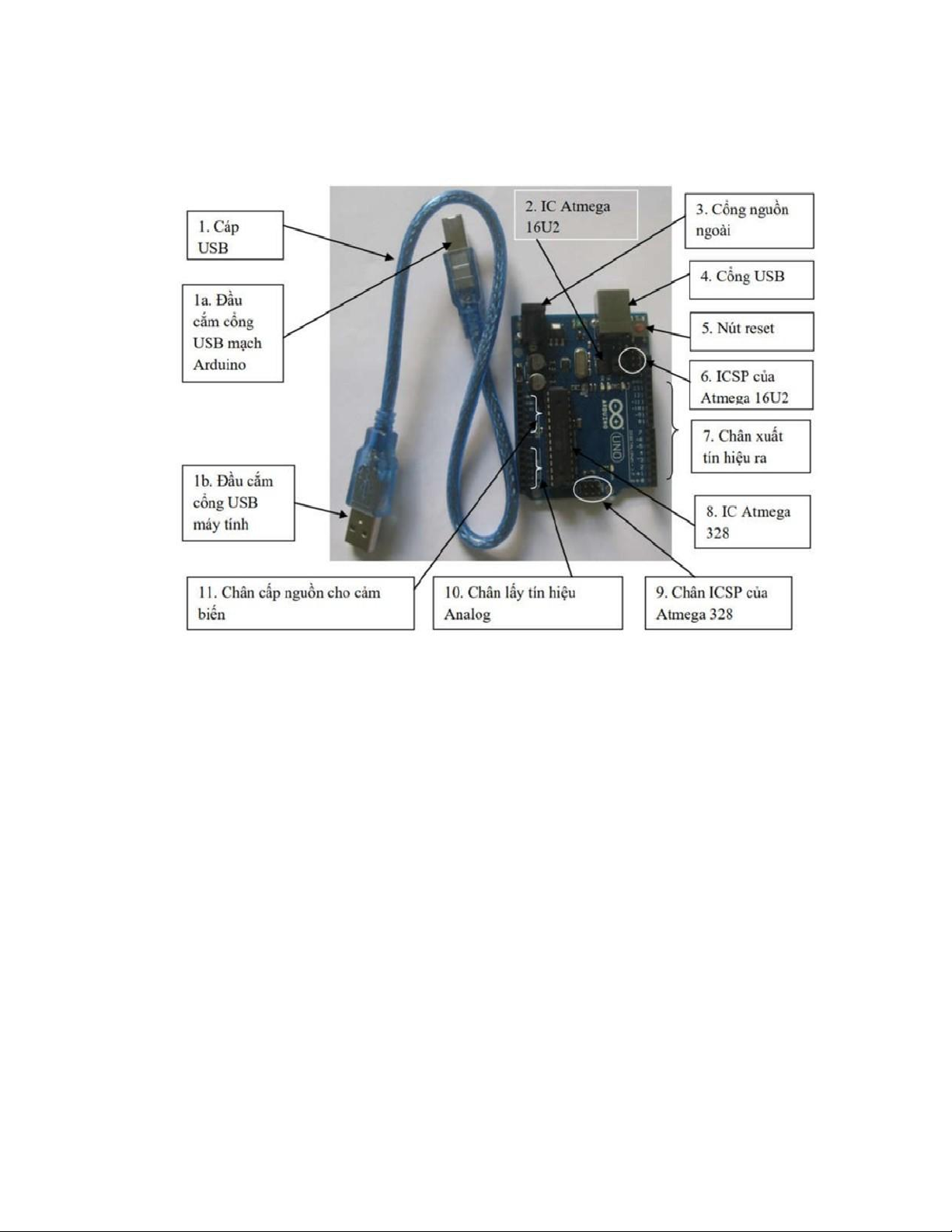
Hình 2.11: Các chi tiết phần cứng của Adruino Uno R3
1. Cáp USB: Đây là dây cáp thường được bán kèm theo bo, dây cáp dùng để cắm vào
máy tính để nạp chương trình cho bo và dây đồng thời cũng lấy nguồn từ nguồn usb
của máy tính để cho bo hoạt động. Ngoài ra cáp USB còn được dùng để truyền dữ
liệu từ bo Arduino lên máy tính. Dây cáp có 2 đầu, đầu 1a được dùng để cắm vào
cổng USB trên bo Arduino, đầu 1b dùng để cắm vào cổng USB trên máy tính.
2. IC Atmega 16U2: IC này được lập trình như một bộ chuyển đổi USB – to-Serial
dùng để giao tiếp với máy tính thông qua giao thức Serial (dùng cổng COM).
Cổng nguồn ngoài: Cổng nguồn ngoài nhằm sử dụng nguồn điện bên ngoài như pin,
bình acquy hay các adapter cho bo Arduino hoạt động.
3. Nguồn điện cấp vào cổng này là nguồn DC có hiệu điện thế từ 6V đến 20V, tuy
nhiên hiệu điện thế tốt nhất mà nhà sản xuất khuyên dùng là từ 7 đến 12V.
4. Cổng USB: Cổng USB trên bo Arduino dùng để kết nối với cáp USB.
5. Nút reset: Nút reset được sử dụng để reset lại chương trình đang chạy.
Đôi khi chương trình chạy gặp lỗi, người dùng có thể reset lại chương trình.
6. ICSP của Atmega 16U2: ICSP là chữ viết tắt của In-Circuit Serial Programming.
Đây là các chân giao tiếp SPI của chip Atmega 16U2. Các chân này thường ít được
sử trong các dự án về Arduino.
Tài liệu liên quan:
-

Arduino UNO R3 Reference Manual: Features & Applications Guide | Môn Hệ thống nhúng trong công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
123 62 -

Building XOR Gate Using AND, OR, and NOT Gates | Môn Hệ thống nhúng trong công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
159 80 -

DALI LED Driver Control System Using Raspberry Pi3: Design & Implementation | Môn Hệ thống nhúng trong công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
120 60 -

Báo cáo tuần 1: Hệ thống nhúng và Cài đặt MPLAB, XC18 | Môn Hệ thống nhúng trong công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
103 52