Khóa luận tốt nghiệp: Mô phỏng và thực nghiệm phanh MRF sử dụng cho hệ thống lái điện tử SBW có phản hồi mômen môn Công nghệ kỹ thuật cơ khí | Trường Đại học Công nghiệp Thành phố Hồ Chí Minh
Khóa luận tốt nghiệp: Mô phỏng và thực nghiệm phanh MRF sử dụng cho hệ thống lái điện tử SBW có phản hồi mômen môn Công nghệ kỹ thuật cơ khí | Trường Đại học Công nghiệp Thành phố Hồ Chí Minh. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Công nghệ kỹ thuật Ô tô 13 tài liệu
Trường: Trường Đại học Công nghiệp Thành phố Hồ Chí Minh 776 tài liệu
Tác giả:












Preview text:
BỘ CÔNG THƯƠNG
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP HCM KHOA CƠ KHÍ
BỘ MÔN CÔNG NGHỆ KỸ THUẬT CƠ KHÍ
KHÓA LUẬN TỐT NGHIỆP
TÊN ĐỀ TÀI: MÔ PHỎNG VÀ THỰC NGHIỆM
PHANH MRF SỬ DỤNG CHO HỆ THỐNG LÁI ĐIỆN
TỬ SBW CÓ PHẢN HỒI MÔMEN
Chuyên ngành: Công nghệ Kỹ thuật Cơ khí
Giảng viên hướng dẫn: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY Lã Tấn Đạt 21132931 DHCK17A Dương Ngọc Âu 21024051 DHCK17A Huỳnh Lê Nguyên 21050641 DHCK17B Vũ Minh Tuấn 21000961 DHCK17A Huỳnh Tạ Tấn Hiệp 21002961 DHCK17A
Thông tin liên lạc: Lã Tấn Đạt (0843843423) Email: Latandat18@gmail.com
Tp Hồ Chí Minh, ngày 11 tháng 12 năm 2025 BỘ CÔNG THƯƠNG
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP HCM KHOA CƠ KHÍ
BỘ MÔN CÔNG NGHỆ KỸ THUẬT CƠ KHÍ
KHÓA LUẬN TỐT NGHIỆP
TÊN ĐỀ TÀI: MÔ PHỎNG VÀ THỰC NGHIỆM
PHANH MRF SỬ DỤNG CHO HỆ THỐNG LÁI ĐIỆN
TỬ SBW CÓ PHẢN HỒI MÔMEN
Chuyên ngành: Công nghệ kỹ thuật cơ khí
Giảng viên hướng dẫn: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY Lã Tấn Đạt 21132931 DHCK17A 0843843423 Dương Ngọc Âu 21024051 DHCK17A 0336385959 Huỳnh Lê Nguyên 21050641 DHCK17B 0946784954 Vũ Minh Tuấn 21000961 DHCK17A 0971899460 Huỳnh Tạ Tấn Hiệp 21002961 DHCK17A 0383713011
Thông tin liên lạc: Lã Tấn Đạt (0843843423) Email: Latandat18@gmail.com
Tp Hồ Chí Minh, ngày 11 tháng 12 năm 2025
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP.HCM
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
KHOA CÔNG NGHỆ CƠ KHÍ
Độc lập – Tự do – Hạnh phúc ---------------------- Đề tài CK 20
Tp. Hồ Chí Minh, ngày 09 tháng 08 năm 2025
NHIỆM VỤ KHÓA LUẬN TỐT NGHIỆP a
1. Tên đề tài: Tính toán và chế tạo phanh MRF sử dụng cho hệ thống lái điện tử SBW có phản hồi mômen.
2. Sinh viên thực hiện: TT Họ và tên MSSV Lớp Điện thoại Ký tên 1 Lã Tấn Đạt 21132931 DHCK17A 0843843423 2 Dương Ngọc Âu 21024051 DHCK17A 0336385959 3 Huỳnh Lê Nguyên 21050641 DHCK17B 0946784954 4 Vũ Minh Tuấn 21000961 DHCK17A 0971899460 5 Huỳnh Tạ Tấn Hiệp 21002961 DHCK17A 0383713011
3. Giảng viên hướng dẫn: ThS. Hoàng Long Vương, ThS. Lê Hải Zy Zy
4. Mục tiêu của đề tài:
- Thiết kế và chế tạo phanh lưu chất từ biến (Magnetorheological Fluid) có mức mô
men tối đa đạt được từ 5.0-6.0 Nm, dùng cho hệ thống lái điện tử SBW (Steering by wire).
- Hệ thống có thể phản hồi mômen theo góc quay của bánh xe và vô lăng. Góc vô lăng
từ 0 đến 720 độ ứng với mức mô men từ 0 đến 5Nm.
5. Nội dung thực hiện:
- Tổng quan về MRF và các nghiên cứu có liên quan đến hệ thống lái.
- Tính toán và thiết kế phanh MRF dùng cho hệ thống lái.
- Mô phỏng và tối ưu hóa phanh MRF dùng cho hệ thống lái.
- Thực nghiệm và đánh giá khả năng đáp ứng của phanh MRF.
- Thiết kế bộ điều khiển vòng hở cho hệ thống phản hồi theo góc quay và mô men cho
hệ thống lái dùng phanh MRF.
6. Thời gian thực hiện: Từ tháng 08 năm 2025 đến tháng 12 năm 2025 i
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
7. Kết quả, sản phẩm dự kiến: TT Tên sản phẩm
Chỉ tiêu chất lượng cần đạt Số lượng 1 Phanh MRF
Hoạt động đúng yêu cầu đề ra 1 2 Quyển thuyết
Định dạng đúng quy định, mức độ trùng lắp < 1 minh 30%. 3 Poster
1 poster giữa kỳ và 1 poster cuối kỳ theo mẫu 2
quy định, in trên decal khổ A1 đứng. 4 Tập bản vẽ Theo tiêu chuẩn TCVN. 2 TM. NHÓM SINH VIÊN GV HƯỚNG DẪN BỘ MÔN KHOA CƠ KHÍ (Ký và ghi rõ tên) (Ký và ghi rõ tên) (Ký và ghi rõ tên) (Ký và ghi rõ tên) ii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY LỜI MỞ ĐẦU
Trong bối cảnh công nghệ ô tô ngày càng phát triển, hệ thống lái tự động Steer-
by-Wire (SbW) đang dần trở thành xu hướng thay thế hệ thống lái cơ học truyền thống.
Ưu điểm của công nghệ này là rõ rệt: nâng cao tính an toàn, tiết kiệm nhiên liệu. Tuy
nhiên, một thách thức lớn với SbW là làm thế nào để người lái vẫn có được cảm giác
chân thật và khả năng kiểm soát tốt nhất, vì thế một hệ thống phản hồi mômen là cần thiết.
Từ thực tế đó, nhóm chúng em đã chọn đề tài: " Tính toán và chế tạo phanh MRF
sử dụng cho hệ thống lái điện tử SBW có phản hồi mômen". Đây là một phương pháp
tiếp cận hoàn toàn mới, vừa giải quyết được hạn chế của hệ thống lái truyền thống, vừa
khai thác được tiềm năng chưa được khám phá của công nghệ này.
Để thực hiện, chúng em đã tiến hành nghiên cứu, thiết kế, và chế tạo một thiết bị
có tên là Magnetic Rheological Tactile Feedback Device (MRTFD). Quá trình này đòi
hỏi sự kết hợp chặt chẽ giữa kiến thức về cơ học, điện tử và công nghệ vật liệu. Nhờ
vậy, chúng em đã hiểu rõ hơn cách chất lưu biến từ phản ứng với từ trường, từ đó có thể
tối ưu hóa hiệu suất và độ an toàn cho hệ thống lái.
Chúng em tin rằng nghiên cứu này sẽ đóng góp tích cực vào việc làm rõ tiềm năng
của công nghệ phản hồi mômen sử dụng chất lưu biến từ trong ngành công nghiệp ô tô.
Công nghệ này không chỉ đại diện cho một bước tiến quan trọng về mặt kỹ thuật mà còn
mở ra khả năng định hình lại xu hướng phát triển của toàn ngành, hướng tới những
phương tiện an toàn, hiệu quả và tiện nghi hơn cho người dùng. Các sáng kiến công
nghệ như vậy được kỳ vọng sẽ tiếp tục thúc đẩy đổi mới và cải tiến, qua đó góp phần
tạo nên sự chuyển đổi bền vững cho ngành công nghiệp ô tô trong tương lai. iii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY LỜI CẢM ƠN
Nhóm chúng em xin chân thành cảm ơn tất cả các Thầy (Cô) bộ môn Công nghệ
kỹ thuật cơ khí đã tận tình chỉ bảo, hướng dẫn nhóm trong suốt quá trình học tập và làm
việc tại Trường Đại học Công nghiệp TP. Hồ Chí Minh. Chúng em xin gửi lời cảm ơn
đến các thầy, các cô đã mang đến cho chúng em những nền tảng kiến thức chuyên môn
vững chắc và cả những kinh nghiệm quý báu. Nhờ đó, nhóm mới có thể hoàn thành được
đề tài nghiên cứu này và ứng dụng những kiến thức đã học vào công việc sau này.
Đặc biệt, nhóm xin trân trọng cảm ơn Thầy ThS. Lê Hải Zy Zy – Giảng viên bộ
môn Cơ Khí và thầy ThS. Hoàng Long Vương – Giảng viên bộ môn CAD/CAM/CNC.
Hai thầy đã luôn đồng hành, hướng dẫn, cung cấp tài liệu và truyền đạt nhiều ý kiến hiệu
quả trong suốt quá trình nhóm thực hiện đề tài. Một lời cảm ơn có lẽ không thể diễn tả
hết sự biết ơn của nhóm đối với những gì các thầy đã dành cho. Nhóm tin rằng những
kiến thức quý báu này sẽ giúp các thành viên trong nhóm phát triển rất nhiều trong sự nghiệp tương lai.
Nhóm cũng xin cảm ơn gia đình, bạn bè và các anh chị khóa trên đã luôn ủng hộ,
động viên tinh thần, giúp nhóm vượt qua những khó khăn, trở ngại trong suốt thời gian qua.
Trong quá trình thực hiện đề tài này, dù đã có kiến thức và kinh nghiệm từ các thầy
cô nhưng nhóm nhận thấy có rất nhiều điều mới mẻ mà nhóm chưa được biết đến. Vì
vậy, đề tài này chắc chắn không tránh khỏi những sai sót và chưa đạt đến mức độ hoàn
thiện. Nhóm rất mong nhận được những nhận xét, đánh giá và ý kiến đóng góp từ các
thầy cô để nhóm có thể thấy được những thiếu sót, từ đó tìm hướng khắc phục và hoàn
thiện đề tài hơn nữa.
Tp. HCM, ngày 11 tháng 12 năm 2025 Sinh viên thực hiện Nhóm CK20 iv
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
NHẬN XÉT CỦA GIẢNG VIÊN HƯỚNG DẪN
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
Tp. Hồ Chí Minh, ngày 11 tháng 12 năm 2025
Giảng viên hướng dẫn v
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
NHẬN XÉT CỦA GIẢNG VIÊN PHẢN BIỆN
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
..............................................................................................................................
Tp. Hồ Chí Minh, ngày 11 tháng12 năm 2025
Giảng viên phản biện vi
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY MỤC LỤC
NHIỆM VỤ KHÓA LUẬN TỐT NGHIỆP .................................................................i
LỜI MỞ ĐẦU .............................................................................................................. iii
NHẬN XÉT CỦA GIẢNG VIÊN HƯỚNG DẪN ....................................................... v
NHẬN XÉT CỦA GIẢNG VIÊN PHẢN BIỆN .........................................................vi
CHƯƠNG 1: TỔNG QUAN ......................................................................................... 1
1.1. Lý do chọn đề tài: ................................................................................................... 1
1.2. Tình hình nghiên cứu trong và ngoài nước: ........................................................ 2
1.2.1. Các nghiên cứu trong nước: ............................................................................... 2
1.2.2. Các nghiên cứu nước ngoài: ............................................................................... 6
1.3. Mục tiêu nghiên cứu: .............................................................................................. 8
1.4. Đối tượng và phạm vi nghiên cứu: ........................................................................ 8
1.4.1. Đối tượng: ............................................................................................................. 8
1.4.2. Phạm vi: ................................................................................................................ 8
1.5. Ý nghĩa khoa học và ý nghĩa thực tiễn: ................................................................ 8
1.5.1. Ý nghĩa về khoa học: ........................................................................................... 8
1.5.2. Ý nghĩa về thực tiễn: ........................................................................................... 9
1.6. Phương pháp nghiên cứu: ...................................................................................... 9
1.7. Nội dung của đề tài: ................................................................................................ 9
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT ........................................................................... 10
2.1. Hệ thống lái Steer-by-Wire: ................................................................................ 10
2.2. Chất lưu biến từ MRF: ........................................................................................ 11
2.2.1. Giới thiệu: ........................................................................................................... 11
2.2.2. Cấu tạo và nguyên lý hoạt động: ...................................................................... 11
2.2.3. Các kiểu hoạt động: ........................................................................................... 13
2.3. Tính toán từ trường: ............................................................................................ 15
2.3.1. Phương pháp giải tích: ...................................................................................... 15
2.3.2. Phương pháp phần tử hữu hạn: ....................................................................... 16
2.4. Phương pháp tối ưu: ............................................................................................. 18
CHƯƠNG 3: THIẾT KẾ TỐI ƯU PHANH MRF VÀ BỘ TRUYỀN ĐỘNG ...... 20
3.1. Thiết kế cơ cấu phanh MRF: ............................................................................... 20
3.2. Phân tích từ MRF với phương pháp PTHH: ..................................................... 21 vii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
3.3 Tính toán mô men xoắn của phanh MRF: .......................................................... 24
3.4 Tính toán bánh răng .............................................................................................. 26
3.4.1 Chọn vật liệu: ...................................................................................................... 26
3.4.2 Ứng suất tiếp xúc 𝝈𝑯: ........................................................................................ 27
3.4.3 Chọn hệ số chiều rộng vành răng ψba theo tiêu chuẩn: ................................ 29
3.4.4 Tính khoảng cách trục aw: ................................................................................ 30
3.4.5 Tính môđun m: ................................................................................................... 30
3.4.6 Tính tổng số răng: .............................................................................................. 30
3.4.7 Xác định lại tỉ số truyền: .................................................................................... 30
3.4.8 Xác định các kích thước bộ truyền: ................................................................. 31
3.4.9 Tính v và chọn cấp chính xác: ........................................................................... 32
3.4.10. Xác định giá trị lực tác dụng lên bộ truyền: ................................................. 32
3.4.11. chọn hệ số tải trọng động: ............................................................................... 32
3.4.12. Xác định σH: ..................................................................................................... 32
3.4.13. Tính các hệ số Y’F2, YF3:.................................................................................. 33
3.4.14. Tính ứng suất uốn tại đáy răng: ..................................................................... 34
CHƯƠNG 4: TỐI ƯU HÓA PHANH MRF ............................................................. 35
4.1. Thiết kế tối ưu hóa phanh MRF: ........................................................................ 35
4.1.1. Bài toán tối ưu hóa cho phanh MRF: .............................................................. 35
4.1.2. Cách giải bài toán tối ưu hóa trên phềm ANSYS Workbench: .................... 36
4.1.3. Kết quả tối ưu hóa phanh MRF có roto hình răng: ....................................... 40
4.2. Kiểm nghiệm độ bền các chi tiết trên phanh MRF: .......................................... 44
4.2.1. Trục phi từ tính: ................................................................................................ 44
4.2.2. Đĩa quay từ tính: ................................................................................................ 46
4.2.3. Đĩa quấn dây: ..................................................................................................... 48
4.2.4. Nắp chụp: ........................................................................................................... 51
CHƯƠNG 5: LẮP RÁP VÀ THỰC NGHIỆM ........................................................ 54
5.1. Các chi tiết sau khi gia công: ............................................................................... 54
5.2. Thiết bị hỗ trợ thu nhập dữ liệu cho mô hình thực nghiệm: ............................ 55
5.2.1. Instek PSW-1080H666 – Nguồn DC lập trình ba kênh, dòng PSW-Multi: . 55
5.2.2. Connector block CB-68LP/CB-68LPR: .......................................................... 57
5.2.3. ENCODER 600 XUNG 5-24VDC NPN 2 XUNG A B: .................................. 58
5.2.4. Cảm biến mômen xoắn 8645 ............................................................................. 59 viii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
5.3. Lắp đặt hệ thống đánh giá thực nghiệm MRTFD ............................................. 60
5.3.1. Quá trình tiến hành đánh giá thực nghiệm thiết bị phản hồi mômen: ........ 60
5.3.2. Xây dựng mối quan hệ giữa dòng điện với mômen: ...................................... 63
5.3.3. Thực nghiệm mô hình phản hồi mômen: ........................................................ 64
CHƯƠNG 6: KẾT LUẬN ........................................................................................... 67
6.1. Kết luận: ................................................................................................................ 67
6.2. Hướng phát triển ................................................................................................. 67
TÀI LIỆU THAM KHẢO ........................................................................................... 68
PHỤ LỤC CODE ANSYS ........................................................................................... 70 ix
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
MỤC LỤC HÌNH ẢNH
Hình 1.1. Cấu hình MRTFD dạng răng hình thang [1] ............................................. 2
Hình 1.2. MRB với các cuộn dây được đặt trên vỏ bên (cuộn dây bên MRB) ........ 4
Hình 1.3. MRB cuộn bên có đặc điểm thành mỏng (MRB cuộn bên thành mỏng)
[2] ..................................................................................................................................... 5
Hình 1.4. MRB đề xuất có rôto hình răng. .................................................................. 5
Hình 1.5. Các thông số hình học của MRB có rôto hình răng. ................................. 6
Hình 1.6. Sơ đồ nguyên lý của phanh từ lưu biến T-rotor ........................................ 7
Hình 2.1. Cấu tạo của MRF ........................................................................................ 12
Hình 2.2. Nguyên lý hoạt động của MRF .................................................................. 12
Hình 2.3. Kiểu dòng chảy của MRF ........................................................................... 13
Hình 2.4. Kiểu trượt của MRF ................................................................................... 14
Hình 2.5. Kiểu nén của MRF ...................................................................................... 14
Hình 2.6. Sơ đồ thuật toán Adaptive Single Objective ............................................. 19
Hình 3.1. Cấu hình và thông số hình học của phanh MRF ..................................... 21
Hình 3.2. Mô hình phần tử hữu hạn phân tích từ của MRF ................................... 22
Hình 3.3. Mô phỏng đường sức từ của MRF ............................................................ 23
Hình 3.4. Các điểm khe hở của MRF......................................................................... 24
Hình 4.1. Tạo liên kết giữa APDL và ANSYS Workbench ..................................... 36
Hình 4.2. Hệ thống Mechanical APDL ...................................................................... 37
Hình 4.3. Thêm tập tin mô hình ................................................................................. 37
Hình 4.4. Các thông số đã chọn .................................................................................. 38
Hình 4.5. Thêm hệ thống Direct Optimization – ASO ............................................. 39
Hình 4.6. Thiết lập cho phương pháp tối ưu hóa ASO ............................................ 39
Hình 4.7. Thông số đầu vào ........................................................................................ 40
Hình 4.8. Thông số đầu ra........................................................................................... 40
Hình 4.9. Kết quả tối ưu hóa của phanh MRF có roto hình răng ........................... 41
Hình 4.10. Mật độ từ trường của phanh MRF rotor hình răng tại thời điểm chưa
tối ưu ............................................................................................................................. 41
Hình 4.11. Mật độ từ trường của phanh MRF có rotor hình răng tại thời điểm tối
ưu ................................................................................................................................... 42 x
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
Hình 4.12. Cơ cấu của trục ......................................................................................... 44
Hình 4.13. Ứng suất của trục ...................................................................................... 44
Hình 4.14. Chuyển vị của trục .................................................................................... 45
Hình 4.15. Cơ cấu của đĩa quay.................................................................................. 46
Hình 4.16. Ứng suất của đĩa quay .............................................................................. 46
Hình 4.17. Chuyển vị của đĩa quay ............................................................................ 47
Hình 4.18. Cơ cấu của đĩa quấn dây .......................................................................... 48
Hình 4.19. Ứng suất của đĩa quấn dây ....................................................................... 49
Hình 4.20. Chuyển vị của đĩa quấn dây ..................................................................... 50
Hình 4.21. Chuyển vị nắp chụp .................................................................................. 51
Hình 4.22. Ứng suất nắp chụp MRF .......................................................................... 51
Hình 4.23. Chuyển vị của nắp chụp ........................................................................... 52
Hình 5.1. Các chi tiết sau khi gia công ....................................................................... 54
Hình 5.2. Sau khi lắp các cuộn dây vào phanh ......................................................... 54
Hình 5.3. Nguồn DC lập trình 3 kênh, dòng PSW – Multi ...................................... 55
Hình 5.4. Connector block CB-68LP/CB-68LPR ..................................................... 57
Hình 5.5. ENCODER 600 XUNG 5-24VDC NPN 2 XUNG A B ............................. 58
Hình 5.6. Cảm biến mômen xoắn 8645 ...................................................................... 59
Hình 5.7. Mô hình hệ thống thực nghiệm MRF........................................................ 60
Hình 5.8. Chương trình Lapview thu thập dữ liệu ................................................... 61
Hình 5.9. Kết quả mômen phản hồi của phanh MRF .............................................. 62
Hình 5.10. Phương trình tính toán của dòng điện với mômen ................................ 63
Hình 5.11. Tiến hành đo thực nghiệm ....................................................................... 64
Hình 5.12. Kết quả quá trình chạy thực nghiệm từ hệ MRF .................................. 65
Hình 5.13: Biểu đồ thực nghiệm khi quay từ hệ MRF ............................................. 66 xi
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY PHỤ LỤC BẢNG
Bảng 3.1: Chọn vật liệu ............................................................................................... 26
Bảng 4.1: Thông số vật liệu của phanh MRF ............................................................ 35
Bảng 5.1: Thông số Instek PSW-1080H666 .............................................................. 56 xii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
DANH SÁCH CHỮ VIẾT TẮT STT KÝ HIỆU CHỮ VIẾT TẮT 1 MR
Từ biến(Magneto-rheological). 2 MRB Từ lưu biến. 3 MRF Lưu chất từ biến(Magneto- rheological fluid). 4 SbW Steer-by-Wire. 5 MRTFD
Thiết bị phản hồi xúc giác dùng
MRF cho hệ thống lái ô tô(Magneto-
rheological tactile feedback device). 6 ECU Bộ xử lý điện tử. xiii
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
CHƯƠNG 1: TỔNG QUAN
1.1. Lý do chọn đề tài:
Hiện nay, các quốc gia trên thế giới ngày càng chú trọng phát triển ngành công nghiệp
ô tô nhằm đáp ứng nhu cầu đi lại ngày càng tăng. Tại Việt Nam, số liệu thống kê trong
những năm gần đây cho thấy tỷ lệ sở hữu ô tô tại nhiều địa phương tăng trưởng đáng kể.
Thực tiễn này đặt ra yêu cầu ngành công nghiệp ô tô phải liên tục đổi mới và hoàn thiện,
đặc biệt là trong việc tích hợp các công nghệ hiện đại trên phương tiện nhằm nâng cao
sự tiện nghi, an toàn và trải nghiệm của người sử dụng.
Trong các hệ thống quan trọng của ô tô, hệ thống lái giữ vai trò quyết định đến khả
năng điều khiển và mức độ an toàn khi vận hành. Nếu trước đây ô tô chủ yếu sử dụng
hệ thống lái cơ khí truyền thống, thì những năm gần đây xu hướng chuyển đổi sang hệ
thống lái điện tử SBW diễn ra mạnh mẽ. Việc ứng dụng SBW mang lại nhiều ưu điểm
như tăng cường an toàn, dễ dàng giám sát tình trạng vận hành nhờ các cảm biến, cải
thiện hiệu suất nhiên liệu và tạo điều kiện linh hoạt hơn trong thiết kế.
Tuy nhiên, một trong những hạn chế lớn của SBW là làm mất đi cảm giác lái tự nhiên
do không còn liên kết cơ khí trực tiếp giữa vô lăng và cơ cấu lái. Vì vậy, cần có một cơ
cấu phản hồi mômen nhằm tái tạo cảm giác lái chân thực và nâng cao mức độ an toàn
cho người điều khiển. Trong số các giải pháp hiện nay, việc sử dụng chất lưu biến từ
Magnetorheological Fluid (MRF) để chế tạo phanh phản hồi mômen được đánh giá là
hướng đi đầy tiềm năng nhờ khả năng thay đổi tính chất nhanh dưới tác dụng của từ
trường, khả năng điều khiển linh hoạt và đáp ứng mượt mà.
Từ những cơ sở trên, có thể nhận thấy rằng mặc dù hệ thống lái điện tử SBW đang
dần trở nên phổ biến, nhưng vẫn cần tiếp tục được cải tiến để hoàn thiện hơn về mặt an
toàn, cảm giác lái và độ tin cậy. Xuất phát từ nhu cầu thực tiễn đó, nhóm đã lựa chọn đề
tài “Tính toán và chế tạo phanh MRF sử dụng cho hệ thống lái điện tử SBW có phản hồi
mômen”. Đề tài không chỉ mang tính ứng dụng cao mà còn tạo điều kiện cho nhóm tiếp
cận, nghiên cứu sâu hơn về vật liệu thông minh và các công nghệ tiên tiến trong hệ thống lái ô tô hiện đại. 1
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
1.2. Tình hình nghiên cứu trong và ngoài nước:
1.2.1. Các nghiên cứu trong nước:
Trong nước hiện nay đã có nhiều công trình nghiên cứu liên quan đến vật liệu chất
lưu biến từ. Một số đề tài tập trung ứng dụng MRF trong các thiết bị phản hồi mômen,
một số khác nghiên cứu về cơ cấu phanh MR, và nhiều nghiên cứu được triển khai trong
lĩnh vực hệ thống treo ô tô. Những hướng nghiên cứu này cho thấy MRF là một vật liệu
có tiềm năng lớn nhờ khả năng đáp ứng nhanh, dải lực điều khiển rộng và khả năng điều
chỉnh đặc tính theo tín hiệu điều khiển.
Về các nghiên cứu nổi bật, có thể kể đến những công trình ứng dụng MRF để chế tạo
phanh có khả năng thay đổi mômen hãm theo tín hiệu điều khiển, các nghiên cứu phát
triển MR cho hệ thống treo nhằm nâng cao độ êm dịu và an toàn khi vận hành, cũng như
một số đề tài ứng dụng MRF trong thiết bị phản hồi mômen của robot. Các kết quả này
đều cho thấy vật liệu MRF có triển vọng lớn trong điều khiển lực và phản hồi mômen,
đồng thời khẳng định tiềm năng ứng dụng rộng rãi của MRF trong lĩnh vực cơ điện tử và công nghệ ô tô.
Các tác giả Bùi Quốc Duy, Hoàng Long Vương và Nguyễn Quốc Hưng đã nghiên
cứu thành công hệ thống phản hồi mômen. Trong đó, điểm nổi bật của hệ thống là thiết
kế bộ phận truyền động có hình dạng răng hình thang.(Hình 1.1)[1]
Hình 1.1. Cấu hình MRTFD dạng răng hình thang [1]
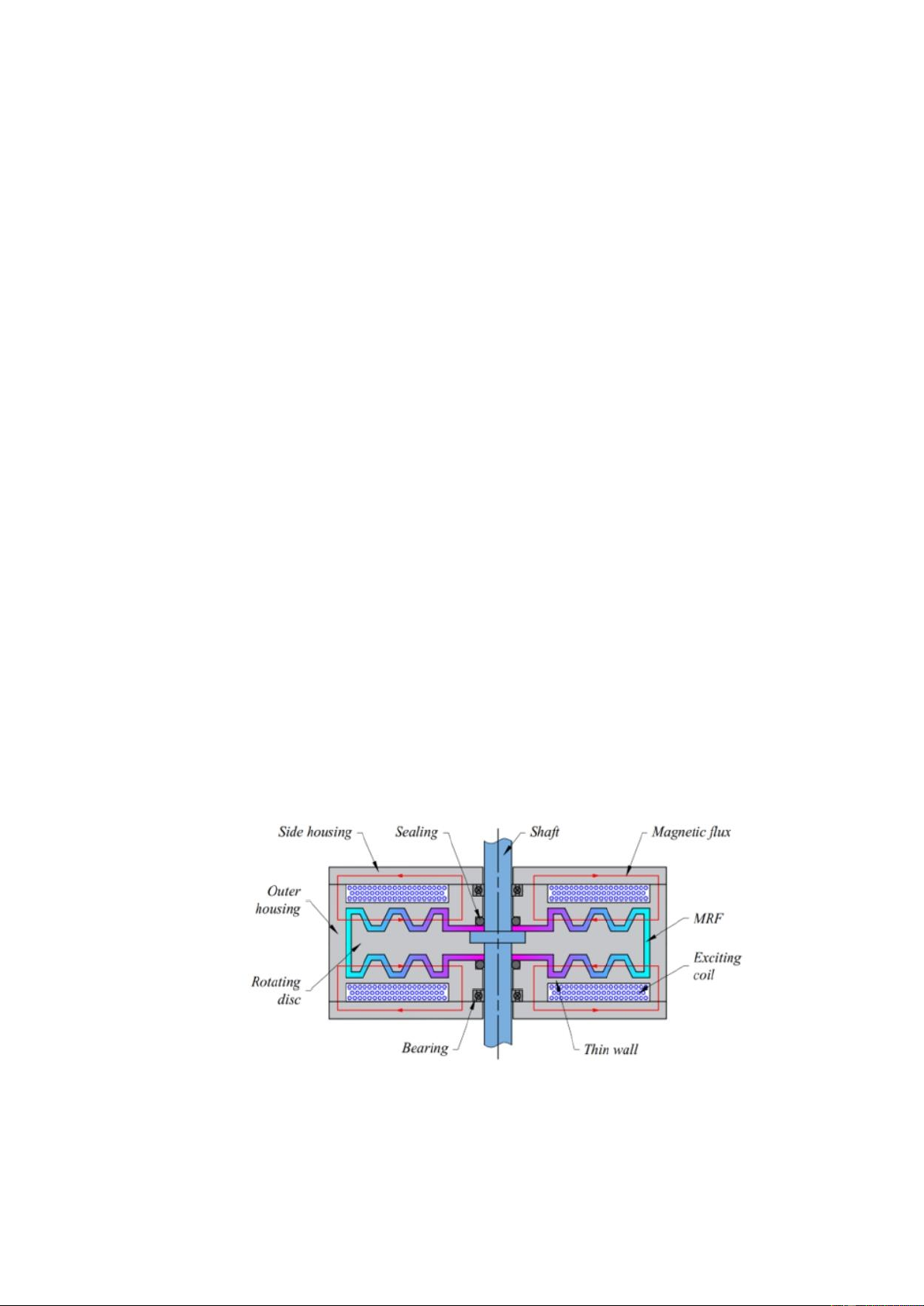
Một đĩa quay với bộ răng hình thang và được làm từ vật liệu từ tính được cố định
vào vai của một trục phi từ tính. Đĩa quay cùng với chuyển động quay của trục, chuyển 2
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
động như rotor của MRTFD. Đĩa được bao phủ bởi vỏ ngoài và vỏ bên được làm từ vật
liệu từ tính. Các vỏ giữ nguyên và được gắn chắc chắn vào khung gầm ô tô. Bề mặt bên
trong của vỏ bên cũng được hình thành một bộ răng hình thang, nó kết nối với bộ tương
ứng trên đĩa quay. MRF được đổ vào khoảng trống giữa đĩa và các vỏ. Hai cuộn dây
được quấn trực tiếp lên các vỏ bên, với một cuộn dây ở mỗi bên, được ngăn cách bởi
một thành mỏng để tách ra khỏi ống dẫn MRF. Khi điện năng được cung cấp cho các
cuộn dây, các từ trường được tạo ra như Hình 1.1. Dòng từ nhanh chóng bão hòa trong
các bức tường mỏng do đó ngay lập tức đi qua ống dẫn MRF. Dưới tác động của từ
trường, MRF giữa đĩa quay và các vỏ cứng lại và cản trở chuyển động quay của trục.
Ma sát giữa đĩa quay và MRF đã cứng lại tạo ra mômen xoắn phản hồi cần thiết.
Bên cạnh đó, công trình nghiên cứu, thiết kế và đánh giá thực nghiệm phanh từ
lưu biến mới của các tác giả Nguyễn Văn Biên và Nguyễn Quốc Hưng cũng là một đóng
góp quan trọng. Trong nghiên cứu này, hệ thống phanh được thiết kế đặc biệt với bộ
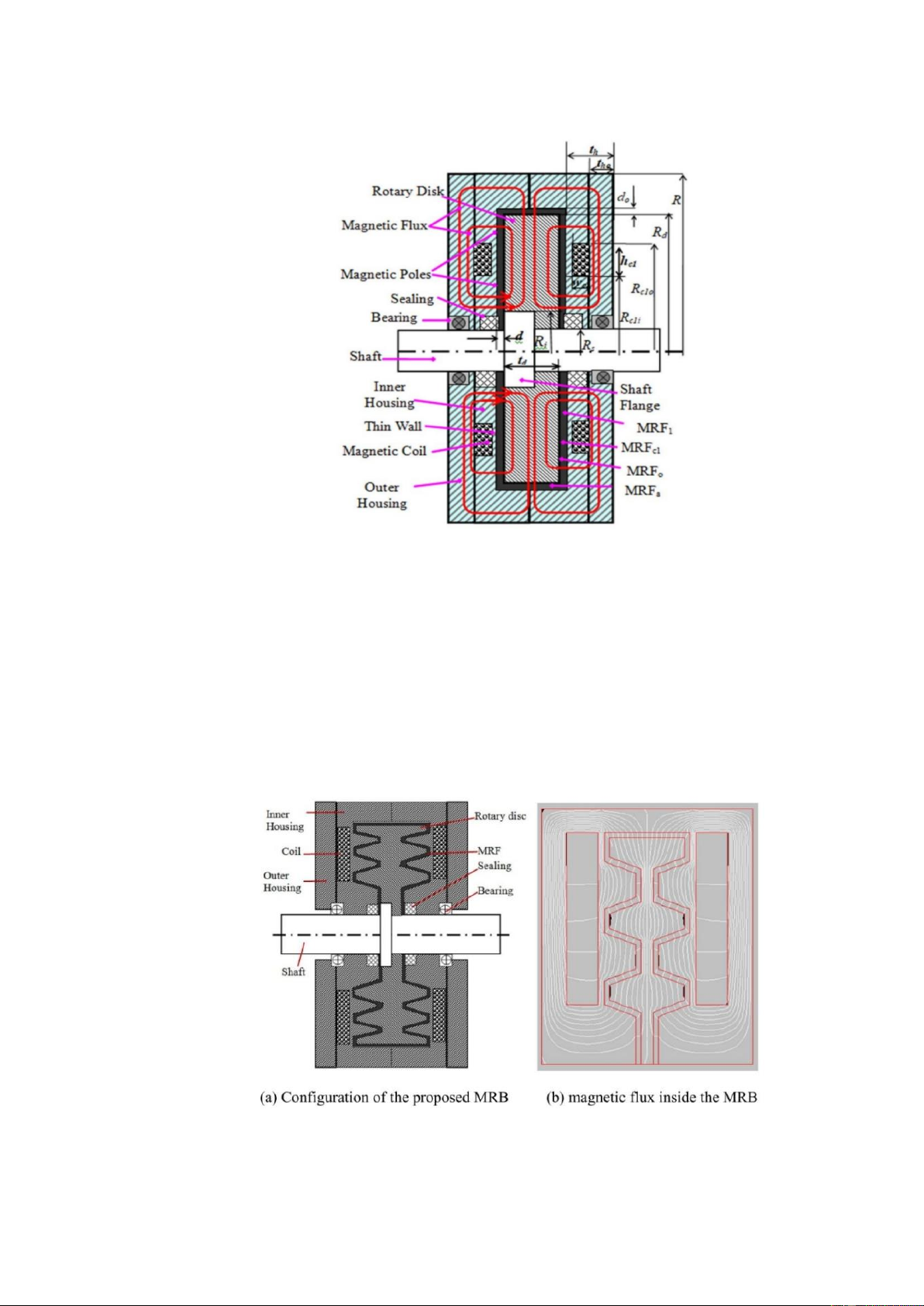
phận rôto có cấu trúc dạng răngTrong nghiên cứu này, một phanh từ lưu biến (MRB)
mới với rotor hình răng đã được phát triển. Trong MRB mới này, rotor hình trụ truyền
thống được thay thế bằng rotor hình răng.
Các răng trên rotor hoạt động như nhiều cực từ của phanh. Hai cuộn dây từ được
đặt trên vỏ bên của phanh để tạo ra từ trường tương hỗ của MRB. Mặt trong của mỗi vỏ
bên cũng có các đặc điểm hình răng. Các đặc điểm hình răng này tương tác với răng
rotor thông qua môi trường chất lưu biến (MRF). Bằng cách sử dụng rotor hình răng,
diện tích giao diện giữa rotor và MRF làm việc có thể được lưu trữ nhiều hơn, điều này
có thể cải thiện các đặc tính hiệu suất của MRB được đề xuất như kích thước nhỏ gọn,
mức tiêu thụ điện năng thấp và mômen phanh cao. Sau khi giới thiệu công nghệ phát
triển MRB tiên tiến, sơ đồ và nguyên lý hoạt động của MRB với rotor hình răng được
đề xuất. Sau đó, mô hình hóa MRB được rút ra dựa trên phân tích phần tử hữu hạn từ
tính và mô hình lưu biến Bingham của MRF. Thiết kế tối ưu của MRB có tính đến khối
lượng và mômen phanh của MRB được tiến hành. Từ kết quả thiết kế tối ưu, có thể thấy
rằng khối lượng và mức tiêu thụ điện năng của MRB được đề xuất nhỏ hơn đáng kể so
với các MRB đã phát triển trước đó. Cụ thể, ở giá trị mômen phanh cực đại cao (100
Nm), khối lượng MRB đề xuất chỉ bằng khoảng 31,3% khối lượng của MRB cuộn đơn 3
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
thành mỏng và 42,6% khối lượng của MRB cuộn đôi thành mỏng. Ngoài ra, ở giá trị
mômen phanh cực đại thấp (5 Nm), mức tiêu thụ điện năng của MRB đề xuất chỉ bằng
khoảng 33% so với MRB cuộn đơn thành mỏng và 45,5% so với MRB cuộn đôi thành mỏng.
Hình 1.2. MRB với các cuộn dây được đặt trên vỏ bên (cuộn dây bên MRB) [2]
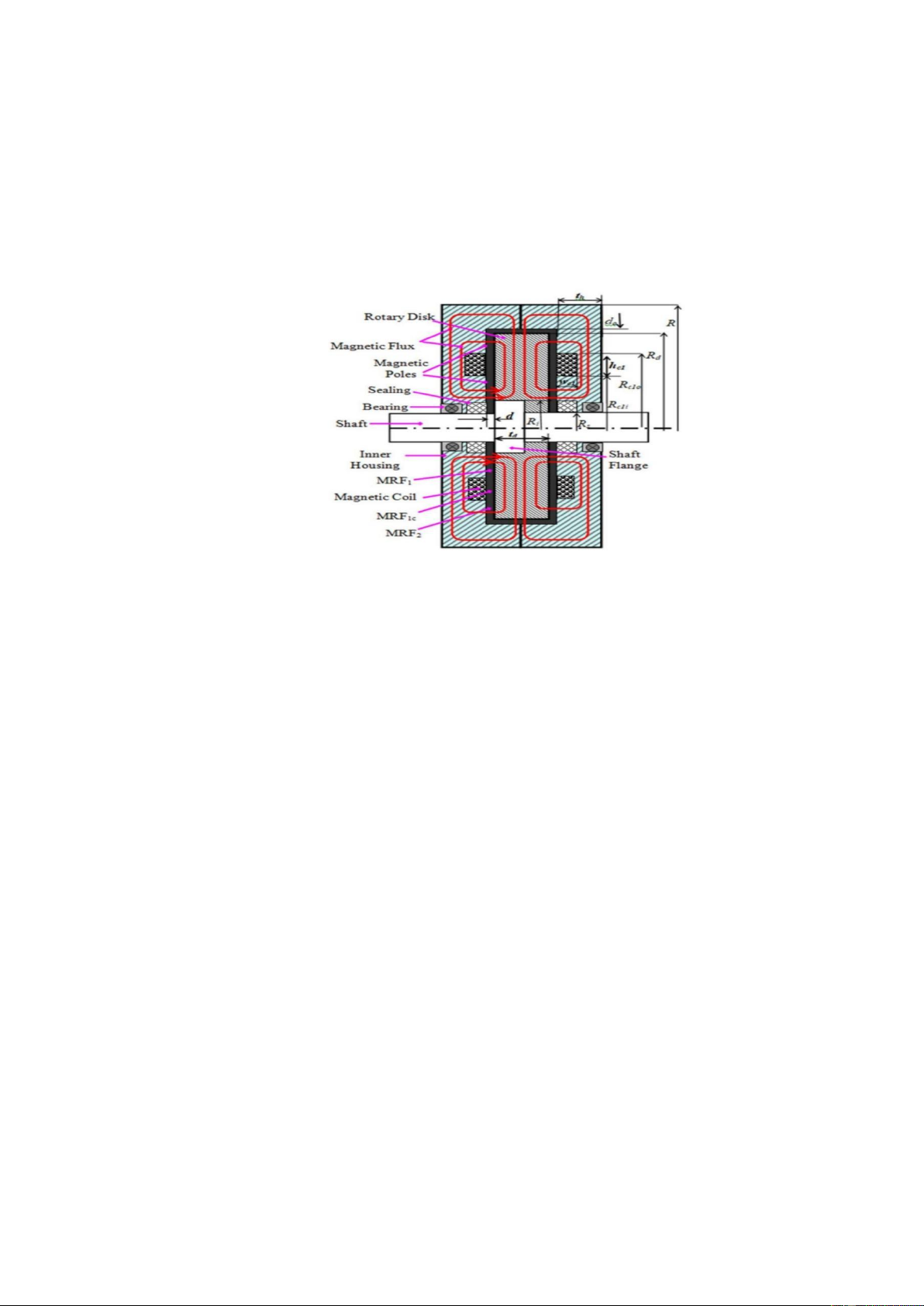
Gần đây hơn, Nguyễn Văn Biên và Nguyễn Quốc Hưng[2]đã nghiên cứu về MRB
cuộn dây bên với các đặc điểm thành mỏng trên vỏ bên, hình 1.3. Bằng cách sử dụng
các tính năng của thành mỏng, các cuộn dây được tách ra khỏi hoạt động cho thấy rằng
bằng cách sử dụng rotor nhiều đĩa, mômen phanh cao đã được phát triển với xác nhận
thử nghiệm . Nó đã được mômen phanh, khối lượng hoặc thể tích nhỏ hơn và mức tiêu
thụ điện năng thấp hơn. Các cấu hình này có thể được phân loại thành MRF. Điều này
mang lại nhiều lợi ích như kích thước khe hở có thể đạt được của ống dẫn MRF nhỏ
hơn, tránh ô nhiễm các cuộn dây do MRF, thuận tiện trong việc bảo trì và thử nghiệm
của MRB đặc biệt là các cuộn dây, v.v. 4
GVHD: ThS. HOÀNG LONG VƯƠNG ThS. LÊ HẢI ZY ZY
Hình 1.3. MRB cuộn bên có đặc điểm thành mỏng (MRB cuộn bên thành mỏng) [2]
Mặc dù nhiều loại MRB đã được phát triển, hầu hết của MRB trước đây có rotor
(đĩa) hình chữ nhật hoặc mặt cắt hình chữ T. Với các rotor truyền thống này, hãy tiếp
xúc diện tích giữa rotor và MRF đang hoạt động không cao như mong đợi đối với kích
thước nhỏ gọn của MRB. Trong ứng dụng hiện đại của MRB như hệ thống phản hồi
mômen hoặc robot, kích thước nhỏ gọn kích thước của MRB rất quan trọng.
Hình 1.4. MRB đề xuất có rôto hình răng. [2] 5
Tài liệu liên quan:
-

Đề cương nguyên lí động cơ đốt trong
6 3 -
Bài Tiểu Luận Công Nghệ Bảo Dưỡng Ô Tô (CN01) - Toyota Camry 2023 Môn Công nghệ kỹ thuật ô tô | Trường Đại học Công nghiệp Thành phố Hồ Chí Minh
129 65 -

Đề cương học phần Nhập môn Công nghệ ô tô (2116424) - Chi tiết và Nội dung Môn Công nghệ kỹ thuật ô tô | Trường Đại học Công nghiệp Thành phố Hồ Chí Minh
108 54 -

So sánh động cơ Yanmar 178F và RCCI bằng phần mềm AVL Boost Môn Công nghệ kỹ thuật ô tô | Trường Đại học Công nghiệp Thành phố Hồ Chí Minh
94 47