Phần mềm tìm đường đi trên bản đồ | Môn Nhập môn trí tuệ nhân tạo - Đại học Bách Khoa Hà Nội
Phần mềm tìm đường đi trên bản đồ Môn Nhập môn trí tuệ nhân tạo. Tài liệu được sưu tầm gồm 14 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Nhập môn trí tuệ nhân tạo hust 18 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:








Preview text:
lOMoAR cPSD| 61552889
ĐẠI HỌC BÁCH KHOA HÀ NỘI
TRƯỜNG CÔNG NGHỆ THÔNG TIN VÀ TRUYỀN THÔNG
──────── * ─────── BÀI TẬP LỚN
MÔN: NHẬP MÔN TRÍ TUỆ NHÂN TẠO
Đề tài: Phần mềm tìm đường đi trên bản đồ Nhóm: 30 Mã lớp học: 144916
Giáo viên hướng dẫn: PGS.TS Trần Đình Khang
Danh sách sinh viên thực hiện: STT Họ và tên Mã sinh Email viên 1 Lương Hoài Nam 20210623 Nam.LH210623@sis.hust.edu.vn 2 Bùi Thế Phong 20215445
Phong.BT215445@sis.hust.edu.vn 3 Đinh Trí Khoa 20215403 Khoa.DT215403@sis.hust.edu.vn 4 Nguyễn Long Nhật 20215440 Nhat.NL215440@sis.hust.edu.vn 5 Phan Hoàng Nam 20215434 Nam.PH215434@sis.hust.edu.vn
Hà Nội, tháng 12 năm 2023 lOMoAR cPSD| 61552889 Mục lục
Mục lục.................................................................................................................. 2
Mục lục hình ảnh ................................................................................................... 3
1. Mô tả bài toán: .................................................................................................. 4
2. Biểu diễn bài toán: ............................................................................................ 4
3. Phương pháp tìm kiếm: ..................................................................................... 8
4. Công cụ thực hiện: .......................................................................................... 11
5. Kết quả: ........................................................................................................... 12 lOMoAR cPSD| 61552889 Mục lục hình ảnh
Hình 1 Mô phỏng các trạng thái trên bản đồ...................................................5
Hình 2 Đường đi trước khi cải tiến thuật toán...............................................10
Hình 3 Đường đi sau khi cải tiến thuật toán..................................................10
Hình 4 Minh họa kết quả bài toán - 1............................................................11
Hình 5 Minh họa kết quả bài toán - 2............................................................12
Hình 6 Minh họa kết quả bài toán – 3...........................................................12 lOMoAR cPSD| 61552889 1. Mô tả bài toán:
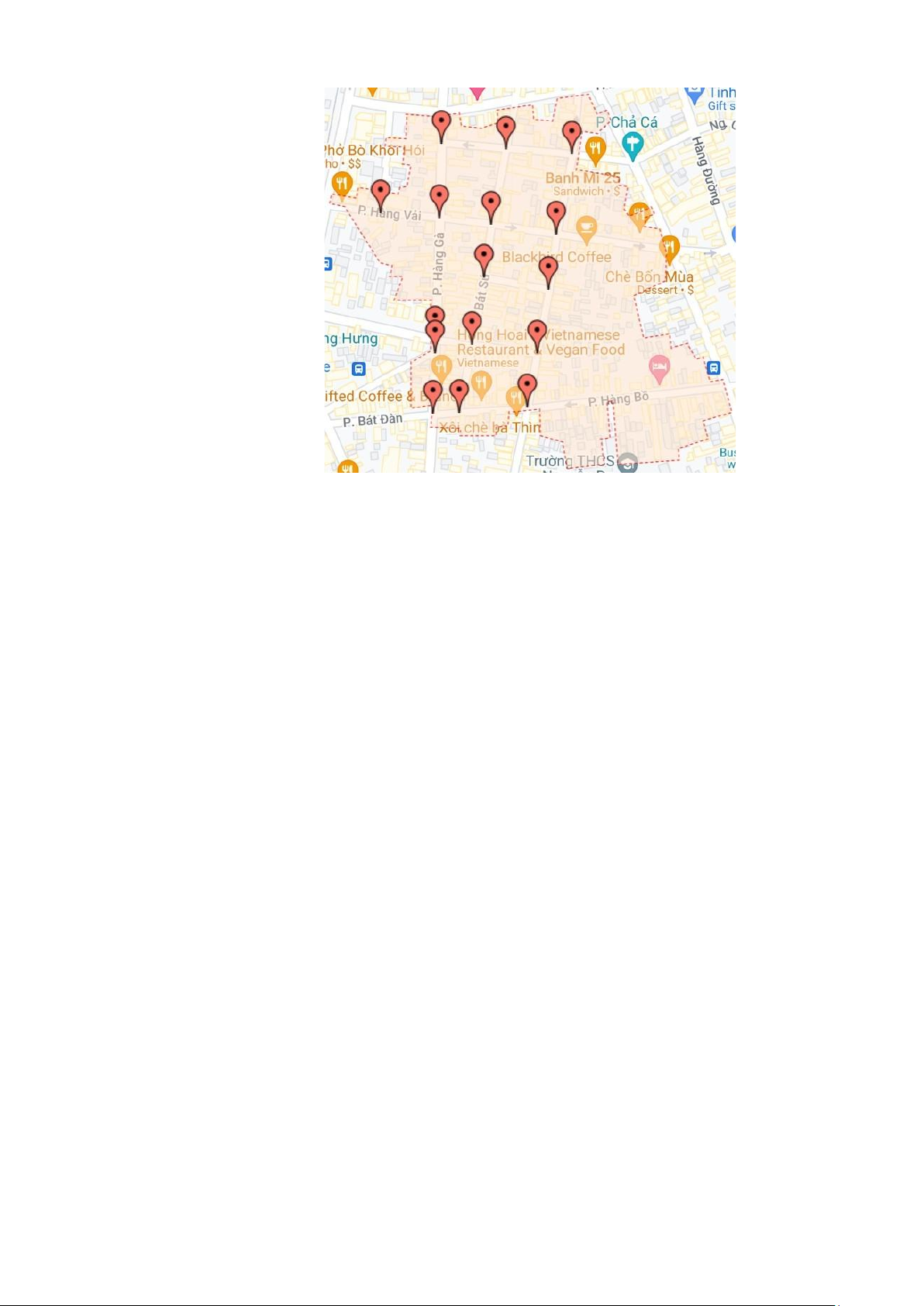
- Xét một mảnh bản đồ của phường Hàng Bồ, quận Hoàn Kiếm, Hà Nội. Bài toán yêu
cầu tìm đường đi giữa 2 điểm A và B bất kỳ và biểu diễn đường đi đó trên bản đồ. - Ràng buộc:
• Chỉ được phép đi trên các tuyến đường, không được phép đi xuyên qua các công trình.
• Không được phép đi trên cùng một tuyến đường nhiều hơn 1 lần 2. Biểu diễn bài toán:
- Trạng thái bài toán: {(lat, lng)}, trong đó lat tương ứng với vĩ độ, lng tương ứng với
kinh độ. Các trạng thái này sẽ bao gồm tất cả các giao lộ trên mảnh bản đồ:
(21.033773176965717, 105.84793937443122),
(21.033731516947956, 105.84724726031048),
(21.033718239526593, 105.84698253583295),
(21.03429206772195, 105.8470029349314),
(21.034419745253814, 105.84700829934943),
(21.034364668684873, 105.84737844419348),
(21.034285582343745, 105.84803436032504),
(21.03488562345316, 105.84815472132074),
(21.035003286596158, 105.84750294453012),
(21.035610086660785, 105.84646070216799),
(21.03556502437502, 105.84705347036028),
(21.035504941306097, 105.84757381890917),
(21.035407306267413, 105.84823364232683),
(21.036165853731504, 105.84839189265871),
(21.036213419285374, 105.847724022614),
(21.036265991722, 105.84706688140535), (21.033934999862513, 105.84989536671564)
Biểu diễn các trạng thái này trên mảnh bản đồ: lOMoAR cPSD| 61552889
Hình 1 Mô phỏng các trạng thái trên bản đồ
Việc xác định trạng thái bài toán như vậy sẽ đảm bảo đường đi tìm được luôn
thỏa mãn ràng buộc: “Chỉ được phép đi trên các tuyến đường, không được phép đi
xuyên qua các công trình”. - Tập các hành động:
(21.033773176965717, 105.84793937443122) -> (21.033731516947956, 105.84724726031048)
(21.033773176965717, 105.84793937443122) -> (21.034285582343745, 105.84803436032504)
(21.033773176965717, 105.84793937443122) -> (21.033934999862513, 105.84989536671564)
(21.033731516947956, 105.84724726031048) -> (21.033718239526593, 105.84698253583295)
(21.033731516947956, 105.84724726031048) -> (21.034364668684873, 105.84737844419348)
(21.033731516947956, 105.84724726031048) -> (21.033773176965717, 105.84793937443122)
(21.033718239526593, 105.84698253583295) -> (21.033731516947956, lOMoAR cPSD| 61552889 105.84724726031048)
(21.033718239526593, 105.84698253583295) -> (21.03429206772195, 105.8470029349314)
(21.03429206772195, 105.8470029349314) -> (21.034419745253814, 105.84700829934943)
(21.03429206772195, 105.8470029349314) -> (21.033718239526593, 105.84698253583295)
(21.034419745253814, 105.84700829934943) -> (21.03429206772195, 105.8470029349314)
(21.034419745253814, 105.84700829934943) -> (21.034364668684873, 105.84737844419348)
(21.034419745253814, 105.84700829934943) -> (21.03556502437502, 105.84705347036028)
(21.034364668684873, 105.84737844419348) -> (21.034285582343745, 105.84803436032504)
(21.034364668684873, 105.84737844419348) -> (21.035003286596158, 105.84750294453012)
(21.034364668684873, 105.84737844419348) -> (21.034419745253814, 105.84700829934943)
(21.034364668684873, 105.84737844419348) -> (21.033731516947956, 105.84724726031048)
(21.034285582343745, 105.84803436032504) -> (21.033773176965717, 105.84793937443122)
(21.034285582343745, 105.84803436032504) -> (21.034364668684873, 105.84737844419348)
(21.034285582343745, 105.84803436032504) -> (21.03488562345316, 105.84815472132074)
(21.03488562345316, 105.84815472132074) -> (21.035003286596158, 105.84750294453012) lOMoAR cPSD| 61552889
(21.03488562345316, 105.84815472132074) -> (21.035407306267413, 105.84823364232683)
(21.03488562345316, 105.84815472132074) -> (21.034285582343745, 105.84803436032504)
(21.035003286596158, 105.84750294453012) -> (21.035504941306097, 105.84757381890917)
(21.035003286596158, 105.84750294453012) -> (21.03488562345316, 105.84815472132074)
(21.035003286596158, 105.84750294453012) -> (21.034364668684873, 105.84737844419348)
(21.035610086660785, 105.84646070216799) -> (21.03556502437502, 105.84705347036028)
(21.03556502437502, 105.84705347036028) -> (21.035610086660785, 105.84646070216799) (21.03556502437502, 105.84705347036028) -> (21.036265991722, 105.84706688140535)
(21.03556502437502, 105.84705347036028) -> (21.035504941306097, 105.84757381890917)
(21.03556502437502, 105.84705347036028) -> (21.034419745253814, 105.84700829934943)
(21.035504941306097, 105.84757381890917) -> (21.035407306267413, 105.84823364232683)
(21.035504941306097, 105.84757381890917) -> (21.036213419285374, 105.847724022614)
(21.035504941306097, 105.84757381890917) -> (21.03556502437502, 105.84705347036028)
(21.035504941306097, 105.84757381890917) -> (21.035003286596158, 105.84750294453012)
(21.035407306267413, 105.84823364232683) -> (21.036165853731504, lOMoAR cPSD| 61552889 105.84839189265871)
(21.035407306267413, 105.84823364232683) -> (21.035504941306097, 105.84757381890917)
(21.035407306267413, 105.84823364232683) -> (21.03488562345316, 105.84815472132074)
(21.036165853731504, 105.84839189265871) -> (21.036213419285374, 105.847724022614)
(21.036165853731504, 105.84839189265871) -> (21.035407306267413, 105.84823364232683)
(21.036213419285374, 105.847724022614) -> (21.036265991722, 105.84706688140535)
(21.036213419285374, 105.847724022614) -> (21.035504941306097, 105.84757381890917)
(21.036213419285374, 105.847724022614) -> (21.036165853731504, 105.84839189265871)
(21.036265991722, 105.84706688140535) -> (21.036213419285374, 105.847724022614) (21.036265991722, 105.84706688140535) -> (21.03556502437502, 105.84705347036028)
(21.033934999862513, 105.84989536671564) -> (21.033773176965717, 105.84793937443122)
Các hành động này tương ứng với việc di chuyển từ 1 giao lộ đến 1 trong các giao lộ liền kề
3. Phương pháp tìm kiếm:
Đầu vào bài toán: Người dùng click vào 2 điểm trên bản đồ.
Đầu ra bài toán: Đường đi giữa 2 điểm đó Phương pháp tìm kiếm:
Bước 1: Xác định trạng thái đầu, trạng thái đích. lOMoAR cPSD| 61552889
- Xác định trạng thái đầu:
+ Kiểm tra tất cả các cặp giao lộ kề nhau, chọn các cặp giao lộ mà điểm xuất
phát nằm trên đoạn đường giới hạn bởi cặp giao lộ này.
+ Trạng thái đầu sẽ là giao lộ gần nhất với điểm xuất phát trong các cặp giao lộ tìm được.
+ Nếu không tìm được cặp giao lộ thỏa mãn yêu cầu trên thì trạng thái đầu sẽ
là giao lộ gần nhất đối với điểm xuất phát -
Xác định trạng thái đích:
+ Kiểm tra tất cả các cặp giao lộ kề nhau, chọn các cặp giao lộ mà điểm kết
thúc nằm trên đoạn đường giới hạn bởi cặp giao lộ này.
+ Trạng thái đích sẽ là giao lộ gần nhất với điểm kết thúc trong các cặp giao lộ tìm được..
+ Nếu không tìm được cặp giao lộ thỏa mãn yêu cầu trên thì trạng thái đích sẽ
là giao lộ gần nhất đối với điểm kết thúc
• Bước 2: Tìm đường đi từ trạng thái đầu đến trạng thái đích:
+ Sử dụng thuật toán A* với hàm đánh giá: f(n) = g(n) + h(n)
Trong đó: g(n) là tổng khoảng cách đường đi thực tế từ trạng thái đầu đến trạng thái
đang xét h(n) là khoảng cách ước lượng (khoảng cách đường chim bay) từ trạng
thái đang xét đến trạng thái đích, được tính theo công thức Haversine:
Giả sử trạng thái đích là (lat2, lng2), trạng thái hiện tại là (lat1, lng1), ta có: h(n)
= 2 * 6731000 * arcsin(sqrt(sin²((π / 180) * (lat2 – lat1) / 2) +
cos((π / 180) * lat1) * cos((π / 180) * lat2) * sin²((π / 180) * (lng2 – ln1) / 2)))
+ Mô tả chi tiết thuật toán:
o Lưu trữ và cập nhật liên tục 2 tập hợp Open và Close, trong đó Open lưu các
trạng thái sẽ được xét, còn Close lưu các trạng thái đã được xét đến rồi và sẽ
không được xét lại. Tập Open được khởi tạo với trạng thái đầu n0, tập Close được khởi tạo rỗng.
o Lưu trữ 1 mảng d[n] là tổng khoảng cách đường đi thực tế từ trạng thái đầu
đến trạng thái n, 1 mảng trace[n] là trạng thái ngay liền trước trạng thái n
trong đường đi cuối cùng tìm được. Khởi tạo d[n0] = 0, còn lại thì bằng inf. lOMoAR cPSD| 61552889
o Định nghĩa 1 hàm distance(n, n*) là khoảng cách giữa 2 trạng thái n và
n*. o Khi tập Open vẫn còn chứa ít nhất 1 trạng thái, thực hiện liên tục các công việc sau:
Chọn trạng thái n có hàm đánh giá f(n) nhỏ nhất trong tập Open.
Xét các hành động từ trạng thái n sang 1 trạng thái n*, nếu n* không
thuộc Close thì đưa n* vào Open.
Cập nhật d[n*] = min(d[n*], d[n] + distance(n, n*)) và trace[n*] = n
nếu d[n*] có sự thay đổi.
Đưa n ra khỏi Open và đưa n vào Close
Nếu tập Open hoặc Close đã chứa trạng thái đích thì kết thúc tìm kiếm
o Dựa vào mảng trace[] đã được tính toán, ta có thể tìm được 1 đường
đi từ trạng thái đầu đến trạng thái đích. Thêm điểm xuất phát và điểm
kết thúc do người dùng chọn vào đầu và cuối đường đi tìm được, ta
đã có được 1 đường đi hoàn chỉnh giữa 2 điểm và đảm bảo việc không
đi xuyên qua bất cứ công trình nào.
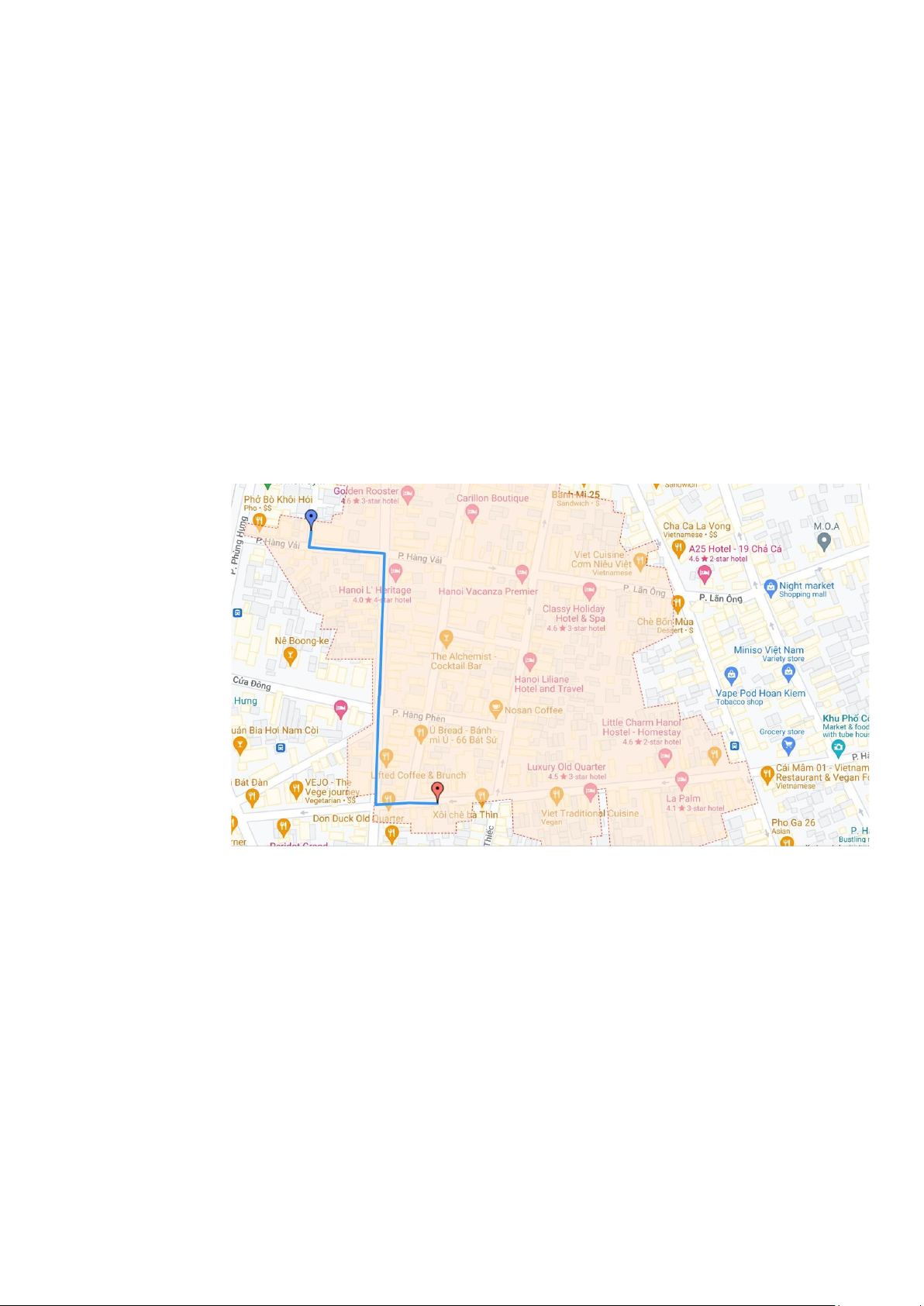
• Bước 3: Cải tiến thuật toán:
- Tình huống: Giả sử A, B lần lượt là 2 điểm được người dùng lựa chọn. Gọi n0 là
trạng thái đầu, n1 là trạng thái tiếp theo,…. Đường đi tìm được sẽ có dạng:
A -> n0 -> n1 -> …. -> nk-1 -> nk -> B
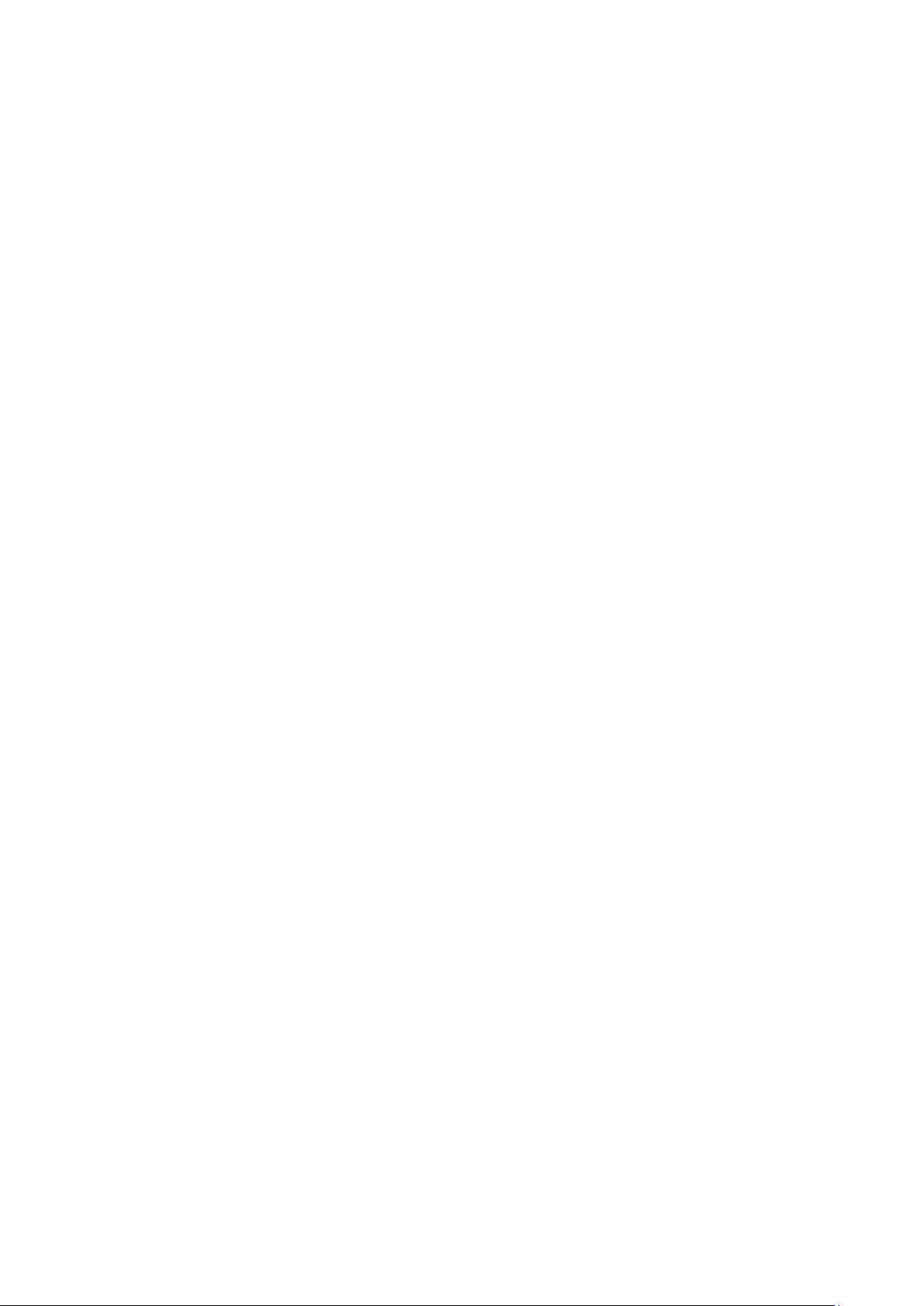
Nếu A nằm trên đoạn đường nối giữa n0 và n1, thì đường đi tìm được sẽ vi phạm
ràng buộc: “Không được phép đi trên cùng một tuyến đường nhiều hơn 1 lần”
- Hình ảnh minh họa cho trường hợp trên: lOMoAR cPSD| 61552889
Hình 2 Đường đi trước khi cải tiến thuật toán - Giải pháp:
+ Kiểm tra xem A có nằm giữa n0 và n1 không, bằng cách so sánh tổng khoảng
cách từ A đến n0 và khoảng cách từ A đến n1, với khoảng cách từ n0 và n1. Nếu 2 giá
trị này xấp xỉ bằng nhau thì A nằm giữa n0 và n1 và ta cần phải loại bỏ n0 khỏi đường đi.
+ Tương tự, ta cũng cần thực hiện cải tiến trên với các trạng thái cuối: nk-1, nk
và điểm kết thúc B. Nếu B nằm giữa nk-1 và nk thì ta cần loại bỏ nk khỏi đường đi.
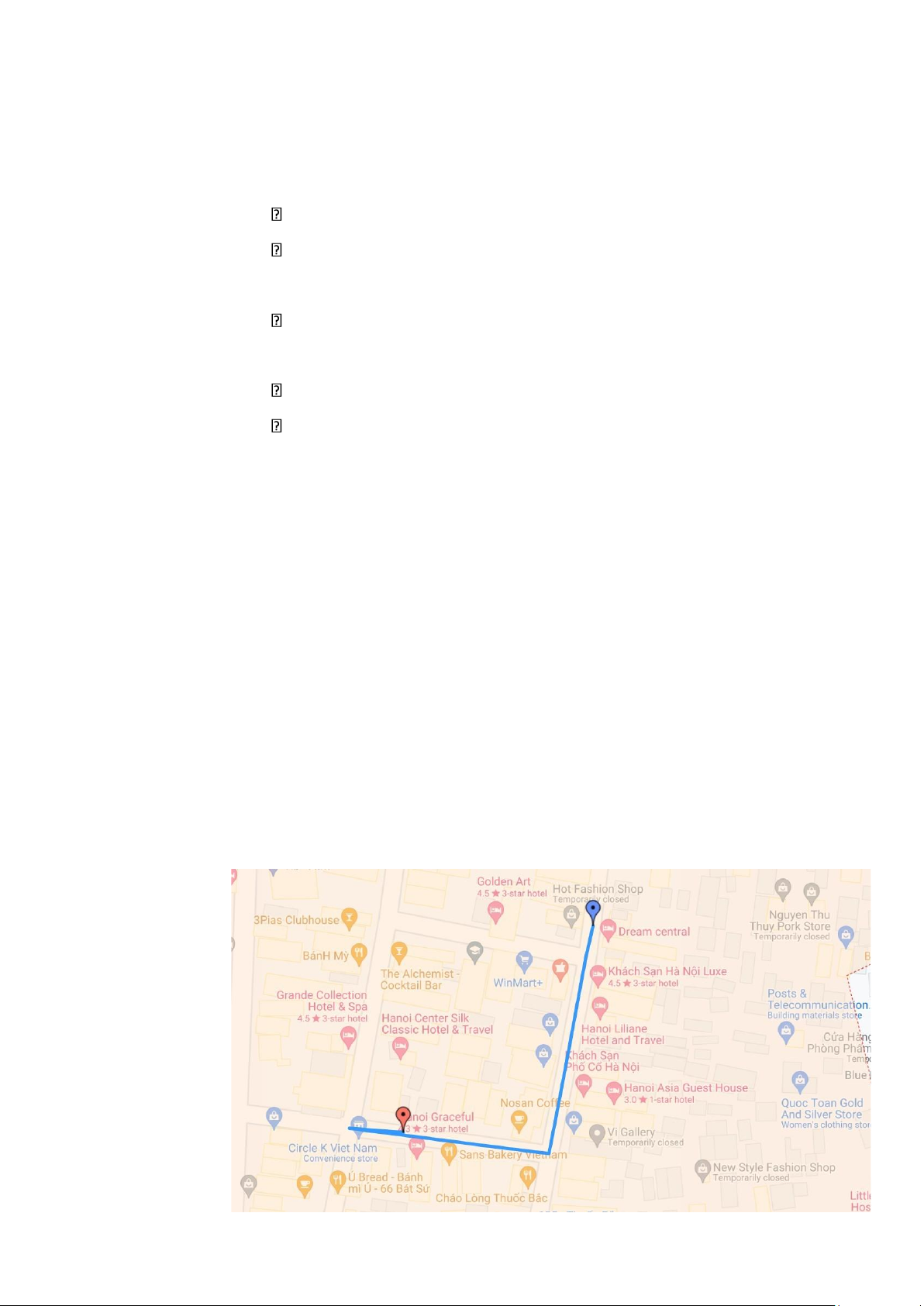
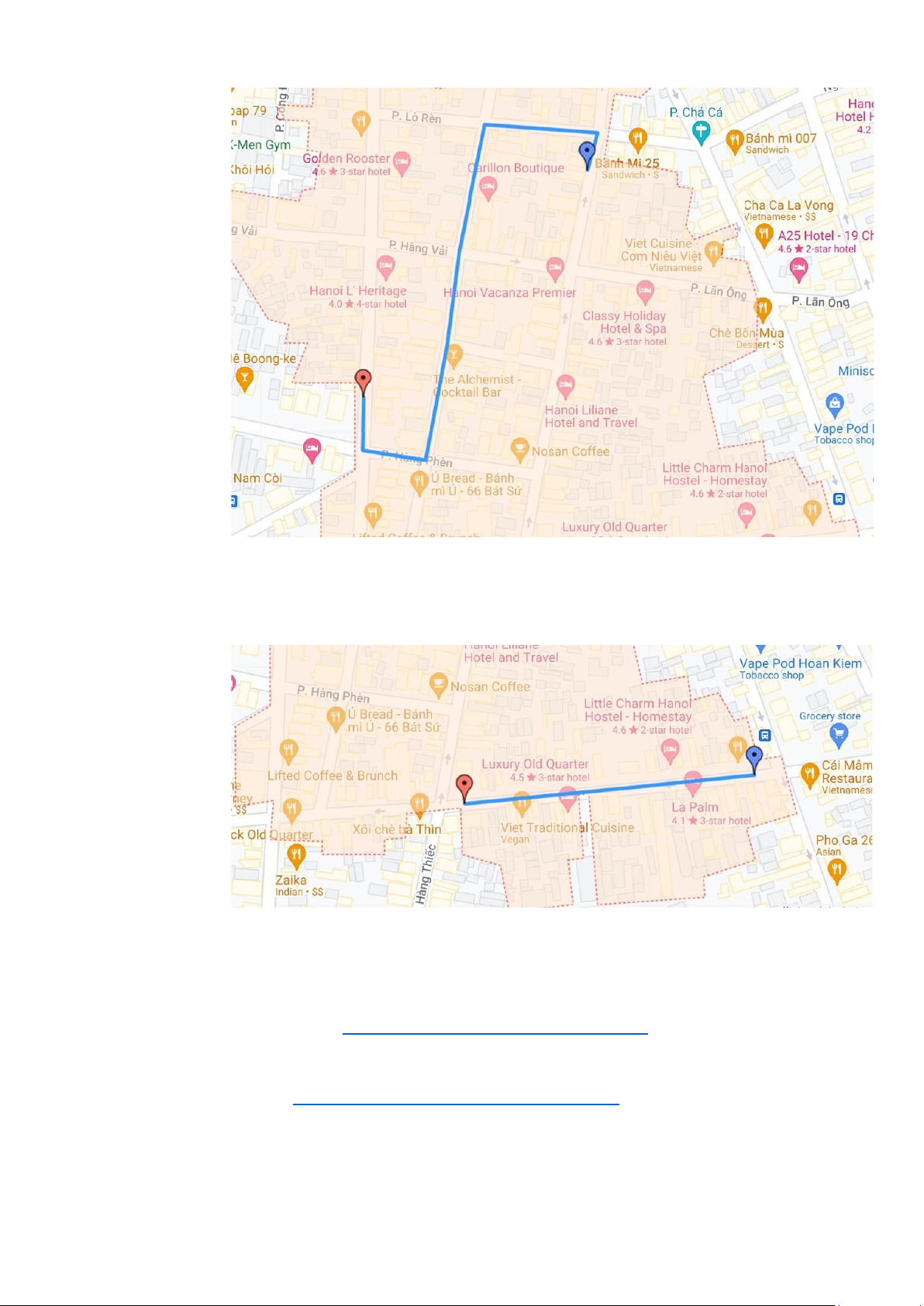
- Hình ảnh đường đi tìm được sau khi cải tiến thuật toán:
Hình 3 Đường đi sau khi cải tiến thuật toán
Như vậy, sau khi thực hiện cải tiến, đường đi tìm được giữa A và B đã chắc
chắn thỏa mãn tất cả các rang buộc. Lưu ý rằng ta không cần kiểm tra đường đi giữa
các trạng thái trung gian từ n1 đến nk-1 nhờ vào tính tối ưu của thuật toán A*. 4. Công cụ thực hiện:
- Ngôn ngữ lập trình: JavaScript. Đây là ngôn ngữ được hỗ trợ bởi API của Google Map: Maps JavaScript API.
- Maps JavaScript API hỗ trợ hệ thống trong việc tạo một bản đồ có thể tương tác với
người dùng, cụ thể các công việc mà API này hỗ trợ: lOMoAR cPSD| 61552889
o Tạo một vùng giới hạn mảnh bản đồ của phường Hàng Bồ, dựa trên các tọa
độ được cung cấp. Vùng giới hạn này được tô màu để người dùng nhận biết
được những vị trí có thể tương tác được.
o Tạo 1 marker với mỗi vị trí mà người sử dụng click lên bản đồ. Vị trí xuất
phát được đánh dấu màu đỏ, vị trí kết thúc được đánh dấu màu xanh
o Mô phỏng đường đi trên bản đồ bằng cách tạo đường thẳng nối các điểm trên
đường đi với nhau. Khi người dùng di chuột vào đường đi, có thể hiển thị độ
dài của đường đi đó (độ dài đường đi được tính toán trước). 5. Kết quả:
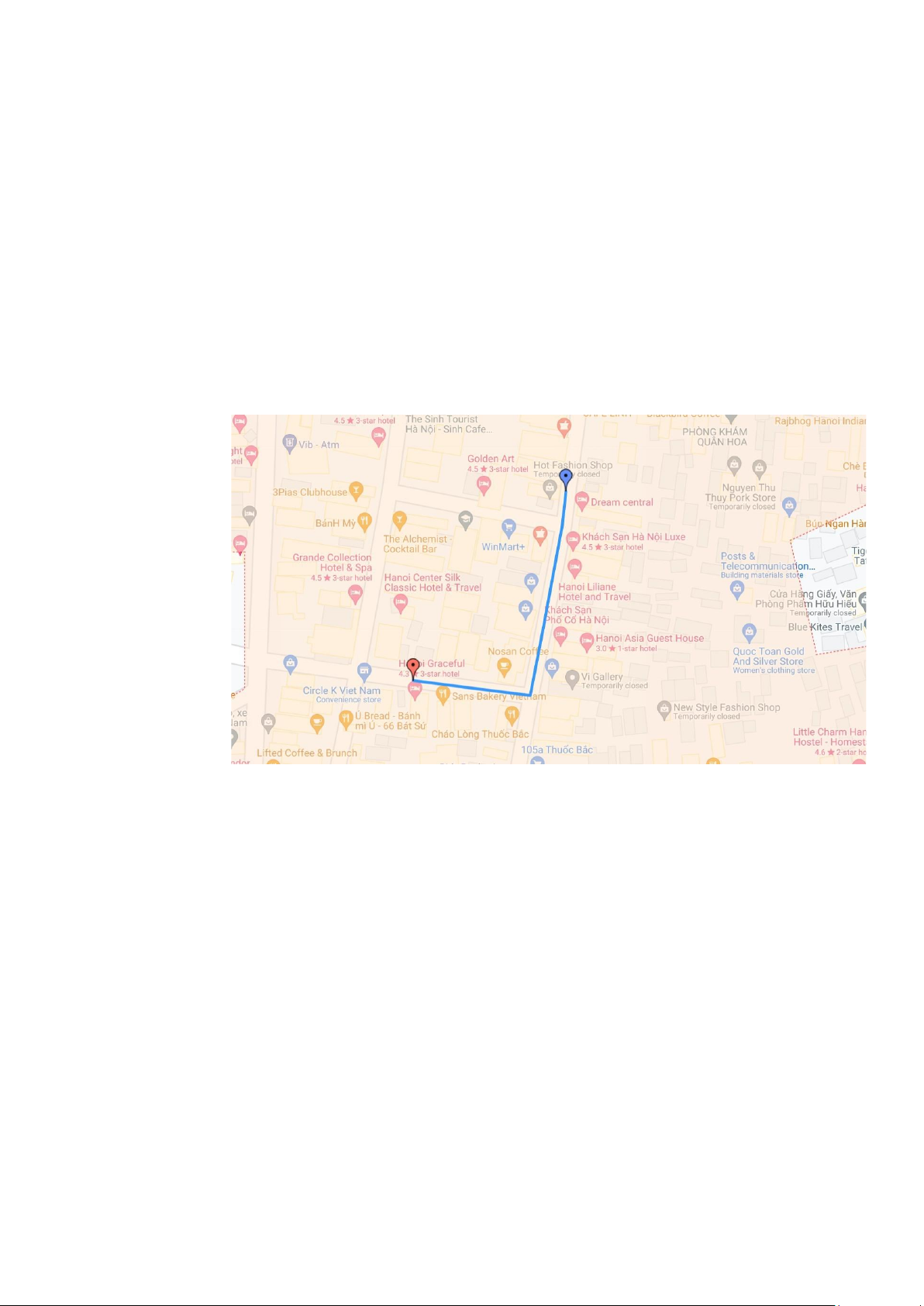
- Hình ảnh minh họa kết quả bài toán:
Hình 4 Minh họa kết quả bài toán - 1 lOMoAR cPSD| 61552889
Hình 5 Minh họa kết quả bài toán - 2
Hình 6 Minh họa kết quả bài toán – 3
- Địa chỉ trang web: https://naml03.github.io/Map-Project/
- Link github: https://github.com/namL03/Map-Project lOMoAR cPSD| 61552889
Tài liệu liên quan:
-

Phần mềm tìm đường đi ngắn nhất trên bản đồ dựa trên các thuật toán | Môn Nhập môn trí tuệ nhân tạo - Đại học Bách Khoa Hà Nội
67 34 -

Ứng dụng các thuật toán tìm kiếm để giải bài toán ghép tranh (N-Puzzle) | Môn Nhập môn trí tuệ nhân tạo - Đại học Bách Khoa Hà Nội
56 28 -

Dự báo giá của các công ty logistics trong thị trường kinh tế biến động | Môn Nhập môn trí tuệ nhân tạo - Đại học Bách Khoa Hà Nội
66 33 -
Báo cáo Bài Tập Lớn Môn Nhập môn trí tuệ nhân tạo | Đại học Bách Khoa Hà Nội
60 30 -
Phần mềm tìm đường đi trên bản đồ phường Phương Mai, quận Đống Đa, Hà Nội | Môn Nhập môn trí tuệ nhân tạo - Đại học Bách Khoa Hà Nội
69 35