PHÂN TÍCH HỆ THỐNG TREO CHỦ ĐỘNG VÀ LÁI CHỦ ĐỘNG
Hệ thống treo chủ động và lái chủ động. Tài liệu được tổng hợp và sưu tầm gồm 9 trang. Mời các bạn tham khảo
Môn: Chi tiết máy (GTVT) 21 tài liệu
Trường: Trường Đại học Giao thông vận tải 487 tài liệu
Tác giả:




Preview text:
PHÂN TÍCH HỆ THỐNG TREO CHỦ ĐỘNG VÀ LÁI CHỦ ĐỘNG
- HỆ THỐNG TREO CHỦ ĐỘNG

1. Nguyên lý làm việc chung
Hệ thống treo chủ động là một cải tiến hiện đại trong công nghệ ô tô, cho phép điều chỉnh đặc tính đàn hồi và giảm chấn của hệ thống treo một cách chủ động dựa trên điều kiện vận hành thực tế.
ECU trung tâm của hệ thống thu thập dữ liệu từ các cảm biến như:
- Cảm biến độ cao thân xe.
- Cảm biến gia tốc dọc, ngang.
- Cảm biến tốc độ bánh xe.
Sau khi xử lý, ECU gửi tín hiệu điều khiển đến cơ cấu chấp hành (bộ giảm chấn điện, bộ khí nén hoặc cơ cấu thủy lực) để thay đổi lực giảm chấn và chiều cao xe.
Kết quả là xe có thể tự động:
- Duy trì độ cao ổn định khi tải thay đổi.
- Giảm dao động thân xe khi vào cua hoặc khi phanh.
- Tăng độ bám đường, êm dịu và an toàn.
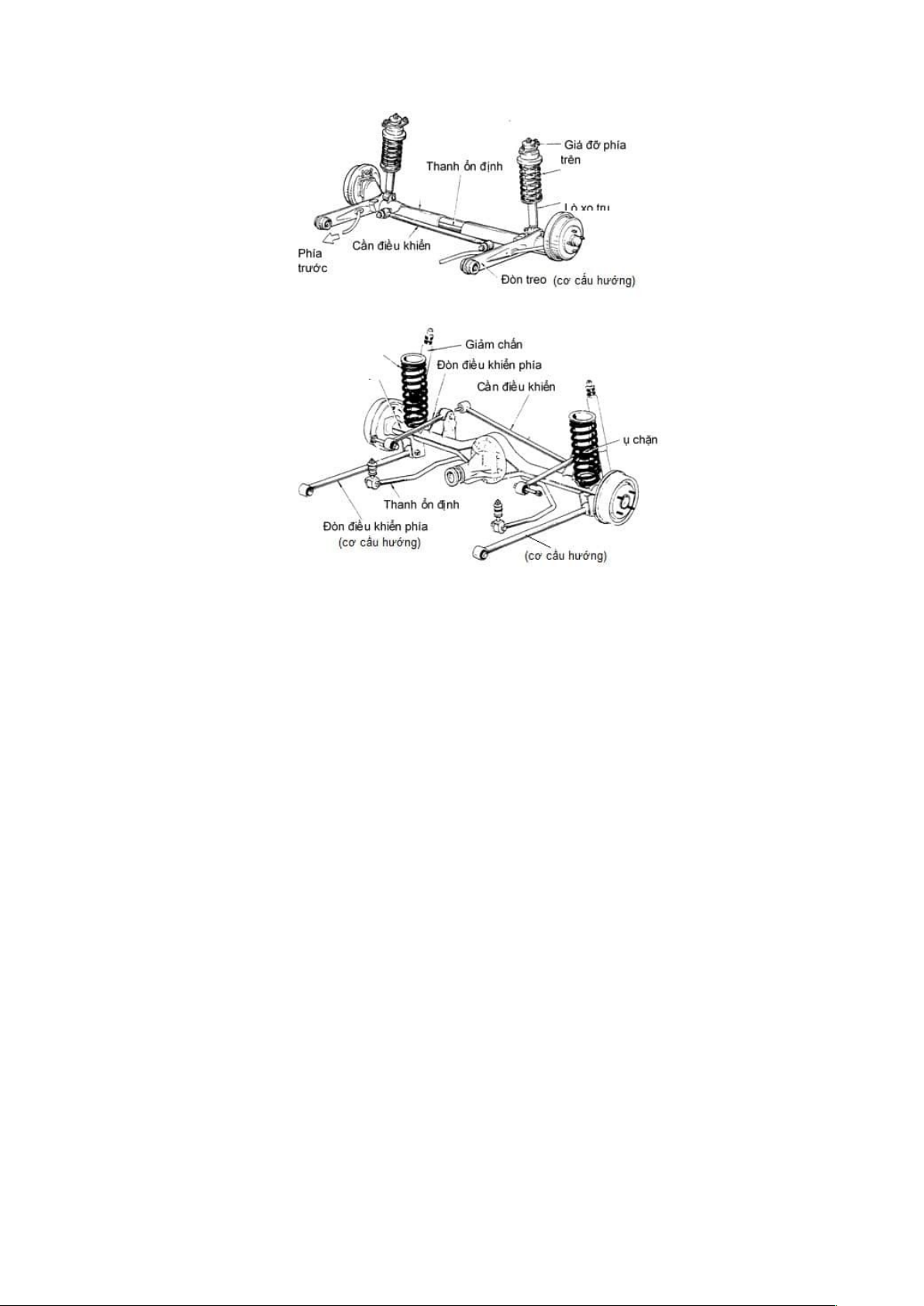
2. Phân tích kỹ thuật và cấu tạo
Cấu trúc cơ bản của hệ thống treo chủ động gồm:
- ECU điều khiển (Electronic Control Unit): xử lý tín hiệu cảm biến và điều khiển cơ cấu chấp hành.
- Cơ cấu chấp hành: gồm xi lanh khí nén hoặc giảm chấn điện từ có khả năng thay đổi lực giảm chấn.
- Cảm biến: gồm cảm biến độ cao, cảm biến tốc độ, cảm biến gia tốc thân xe.
- Cụm máy nén và bình khí: tạo áp suất khí nén cần thiết để điều chỉnh chiều cao thân xe.
- Van điều chỉnh áp suất: kiểm soát lượng khí ra vào ở từng bánh xe.
Hệ thống treo chủ động thường được chia làm hai loại:
- Bán chủ động (Semi-active): chỉ thay đổi đặc tính giảm chấn.
- Chủ động hoàn toàn (Fully active): có thể tác động lực lên hệ thống treo theo cả hai chiều nén và giãn.
3. Cấu trúc cho xe áp dụng thực tế
Trên các dòng xe cao cấp như Mercedes-Benz S-Class, Lexus LS, BMW 7-Series, hệ thống treo khí nén chủ động được áp dụng rộng rãi.
Ví dụ: hệ thống AIRMATIC của Mercedes-Benz sử dụng cảm biến độ cao tại mỗi bánh, điều chỉnh lượng khí nén để giữ cân bằng xe trong mọi điều kiện tải.
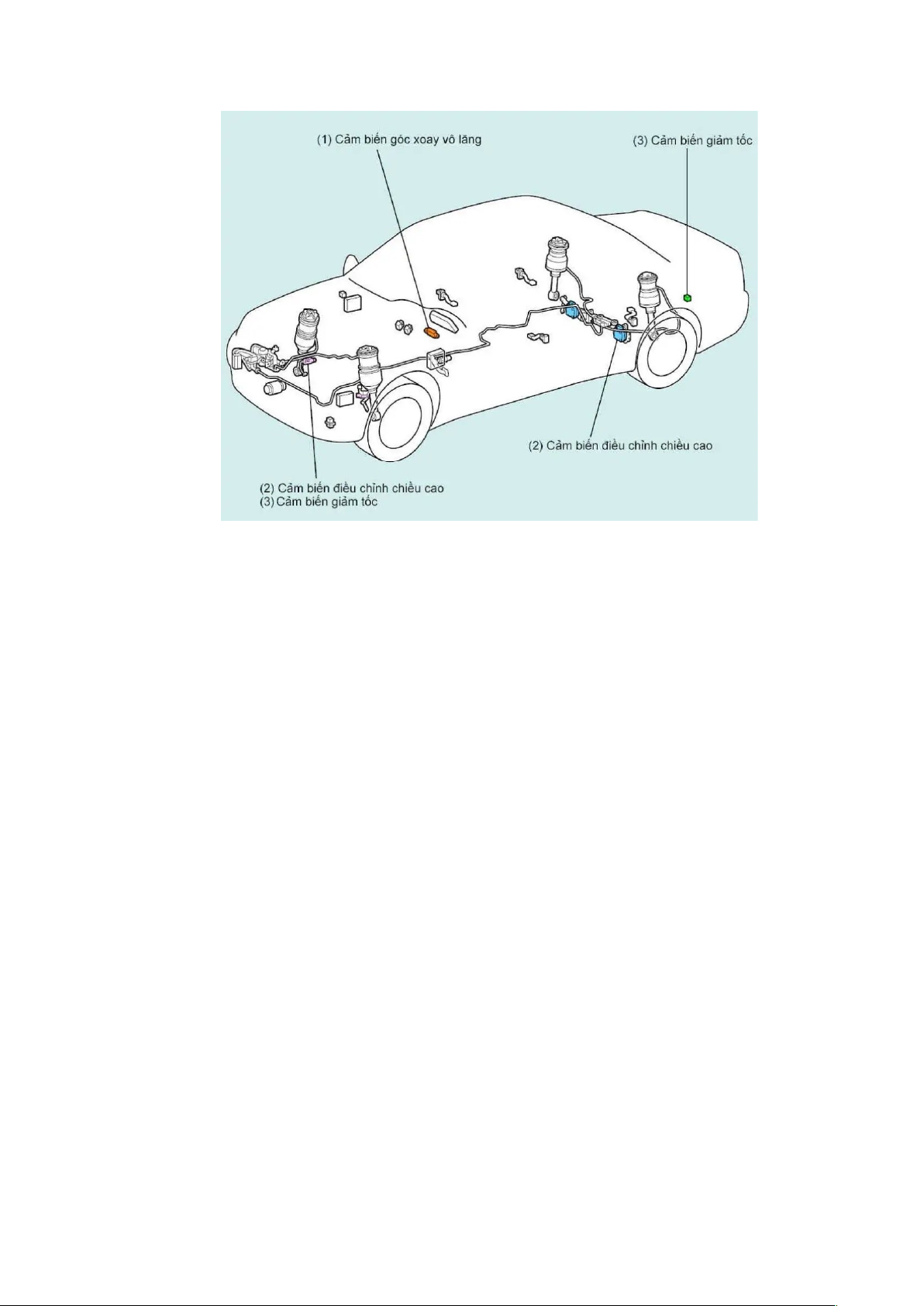
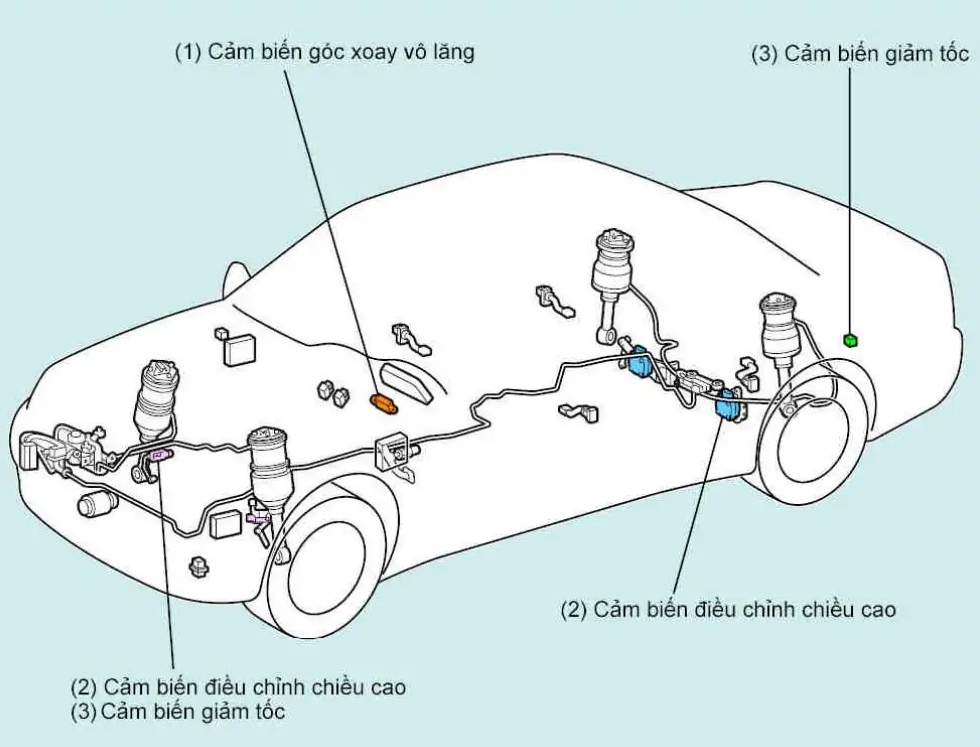
4. Hệ thống cảm biến và cơ cấu chấp hành
- Cảm biến độ cao: đặt ở mỗi bánh xe để đo khoảng cách giữa thân xe và mặt đường.
- Cảm biến tốc độ: lấy tín hiệu từ ABS để đánh giá điều kiện vận hành.
- Bộ chấp hành: xi lanh khí nén hoặc giảm chấn điều khiển điện tử (thường là van điện từ).
5. Hệ thống điều khiển – Đặc tính điều khiển
ECU sử dụng thuật toán điều khiển PID hoặc điều khiển mờ (Fuzzy logic) để tính toán lực giảm chấn tối ưu.
Khi phát hiện rung động hoặc nghiêng thân xe, ECU điều chỉnh lực nén khí hoặc dòng điện vào van điện từ trong vài mili giây để cân bằng lại thân xe.
6. Hình minh họa
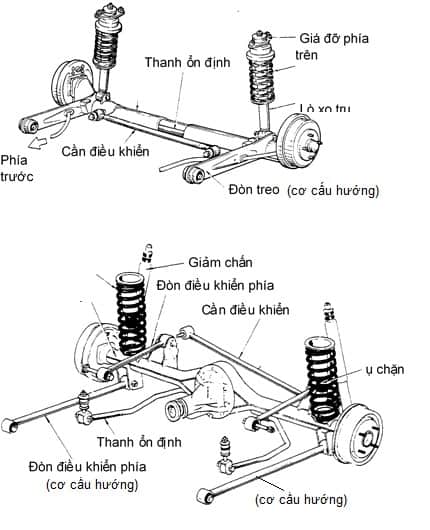
Hình 1: Sơ đồ hệ thống treo chủ động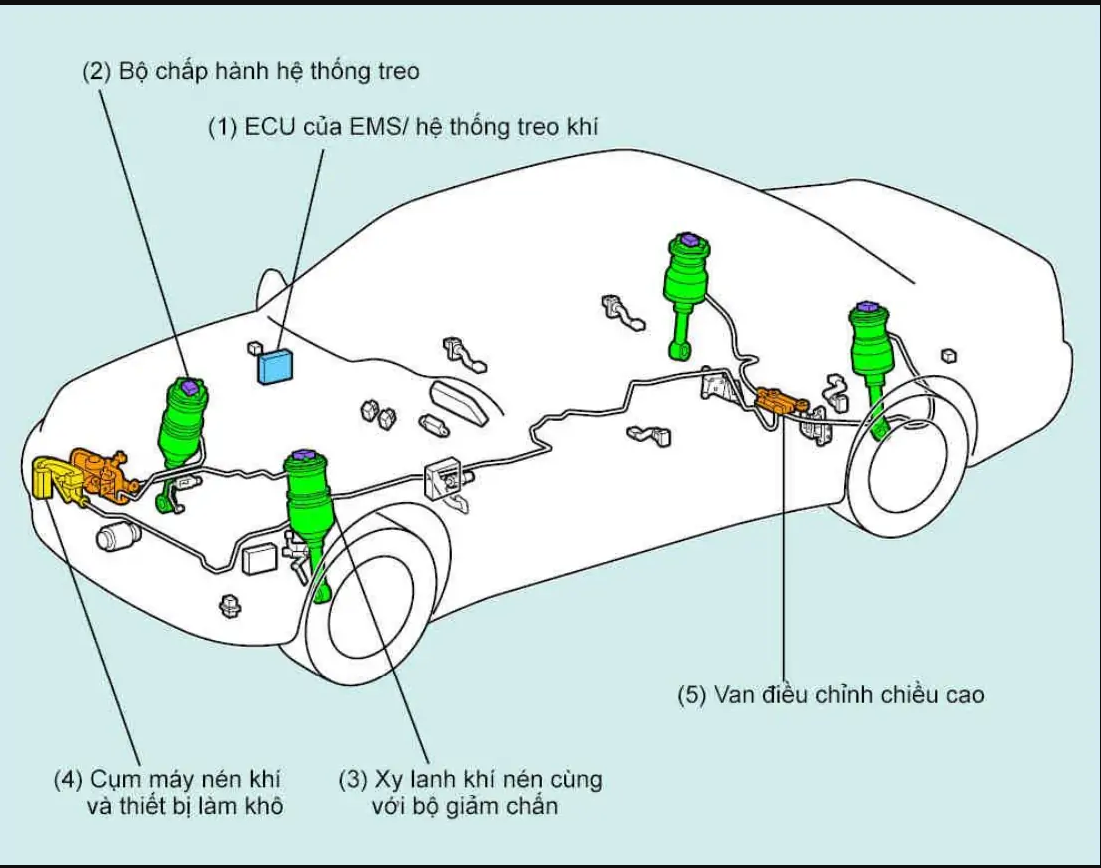
Hình 2: Hệ thống treo chủ động trên Mercedes-Benz S-Class
II. HỆ THỐNG LÁI CHỦ ĐỘNG
1. Nguyên lý làm việc chung
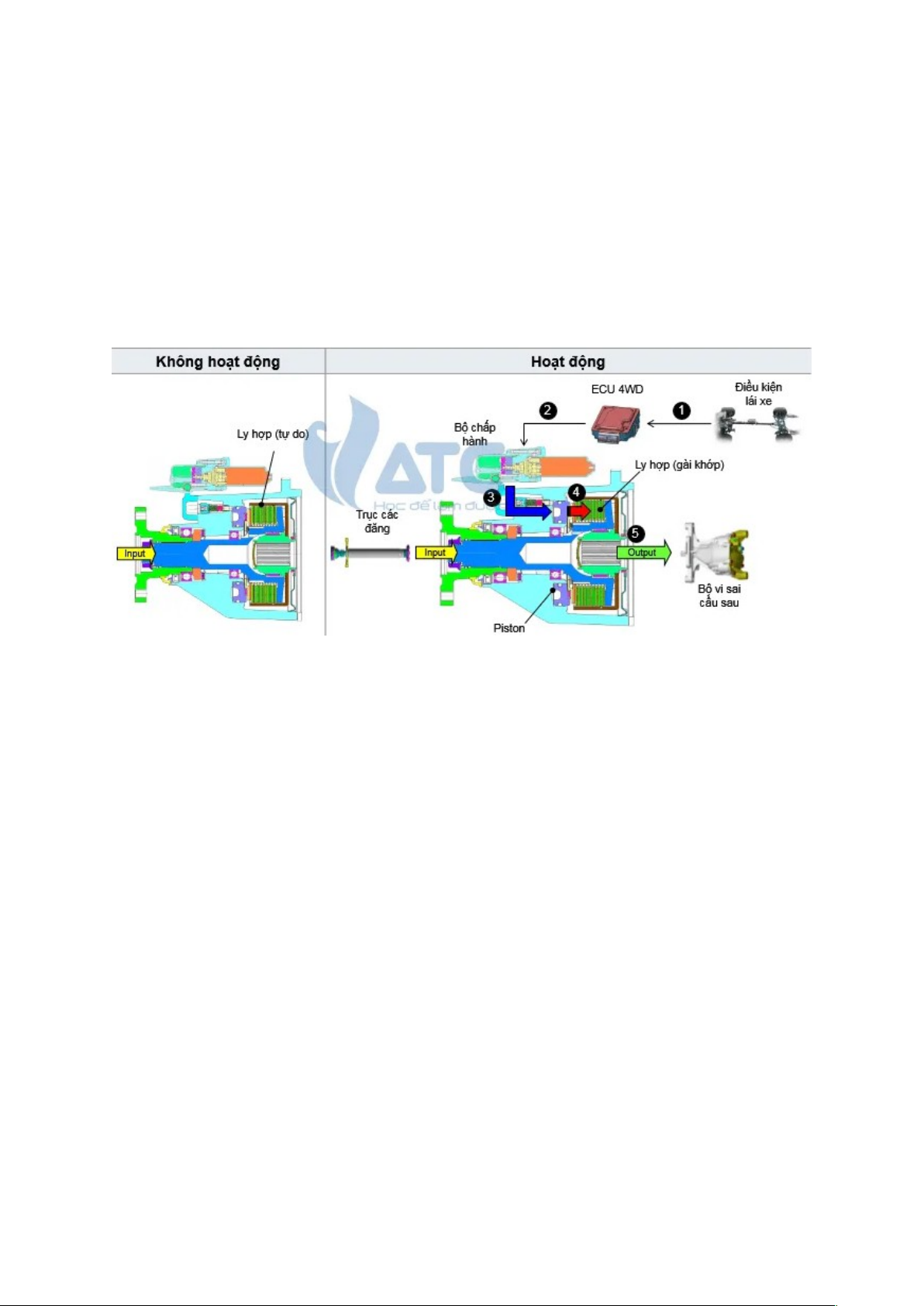
Hệ thống lái chủ động (Active Steering / Four-Wheel Steering – 4WS) cho phép cả bánh trước và bánh sau có thể thay đổi góc lái tùy theo tốc độ và điều kiện lái xe.
- Ở tốc độ thấp: bánh sau quay ngược chiều bánh trước, giúp giảm bán kính quay, dễ quay đầu trong không gian hẹp.
- Ở tốc độ cao: bánh sau quay cùng chiều bánh trước, giúp ổn định hướng xe, giảm văng đuôi và tăng an toàn khi chuyển làn.
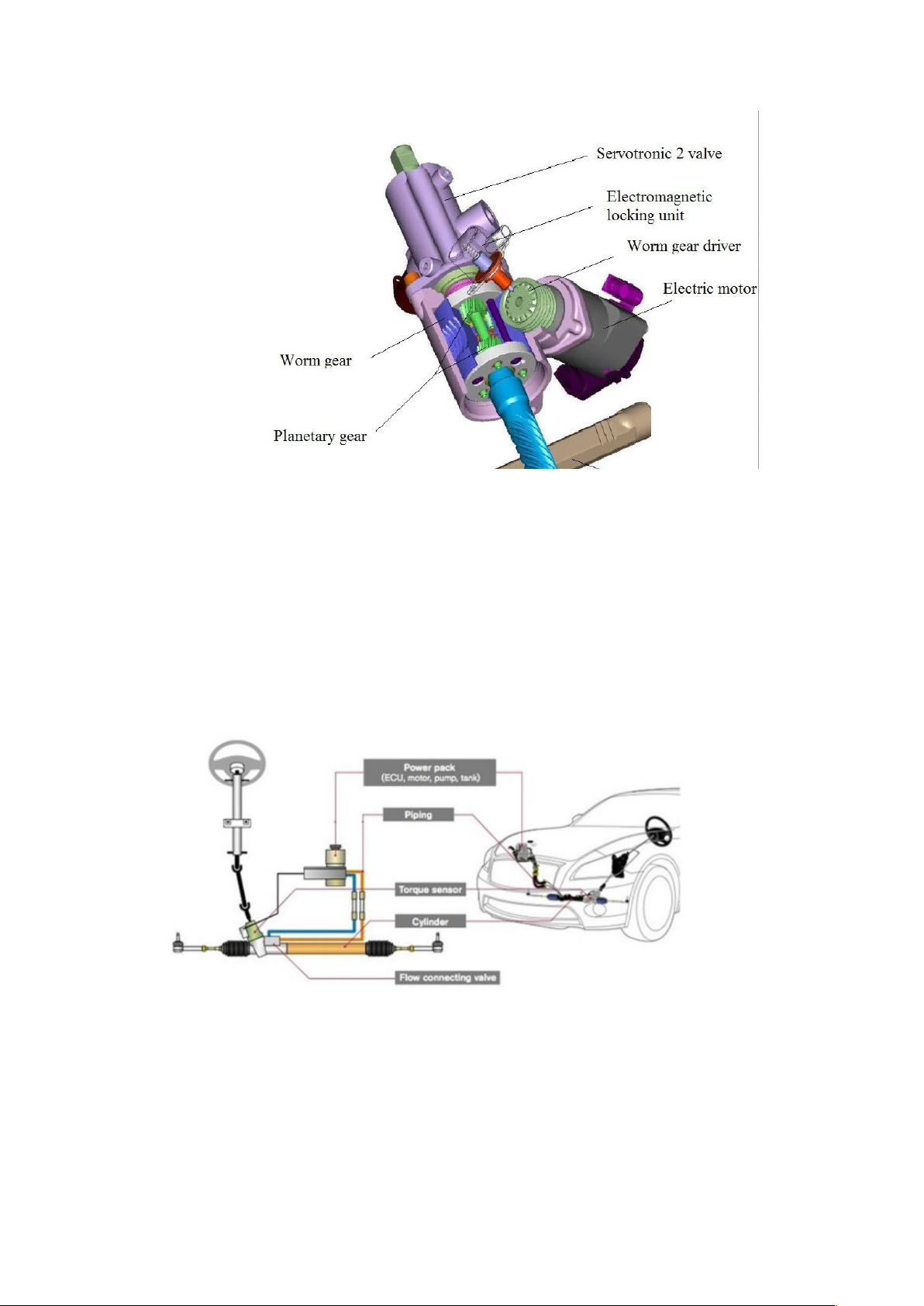
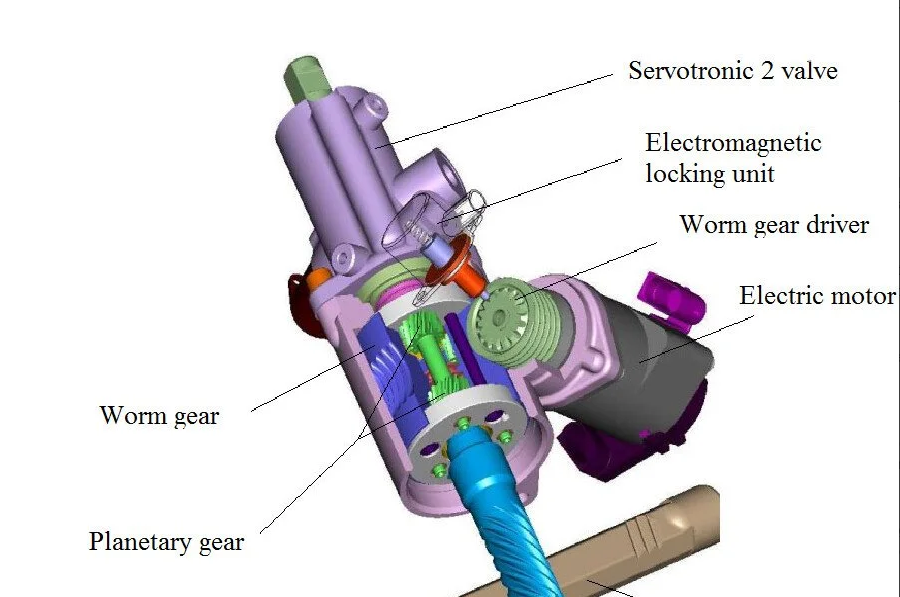
2. Phân tích kỹ thuật cấu tạo
Cấu tạo chính gồm:
- Cảm biến góc lái: đo góc xoay vô lăng.
- Cảm biến tốc độ xe: lấy tín hiệu từ hệ thống ABS/ESP.
- ECU điều khiển: tính toán góc lái phù hợp và gửi lệnh đến mô-tơ chấp hành.
- Cơ cấu chấp hành: thường là mô-tơ điện hoặc cơ cấu thủy lực điều khiển góc bánh sau.
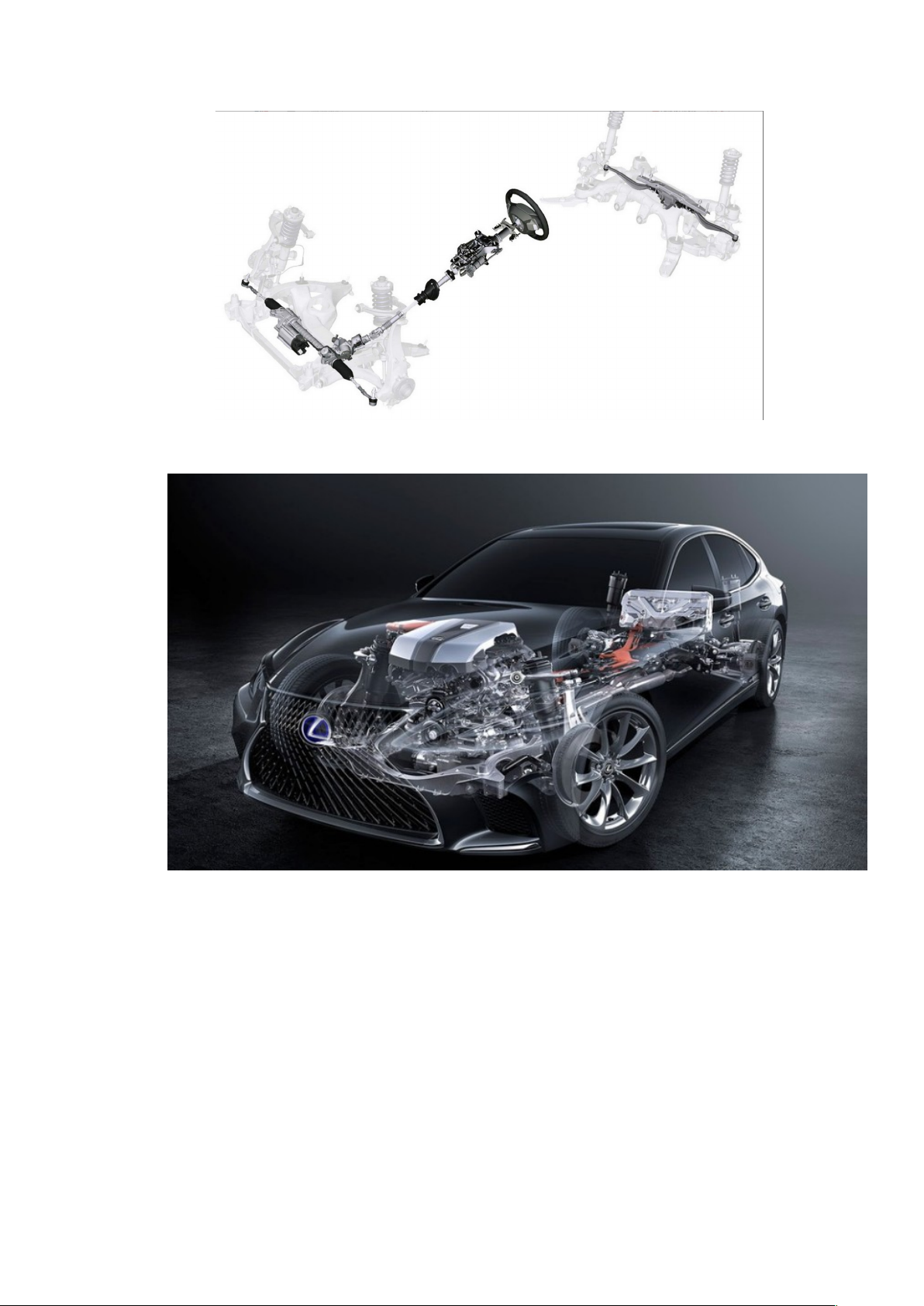
3. Cấu trúc cho xe thực tế
Hệ thống này được trang bị trên nhiều xe hiện đại như:
- BMW 5-Series, 7-Series (Integral Active Steering).

- Lexus LS 500h (Dynamic Rear Steering).

- Nissan Skyline (HICAS system).
4. Hệ thống cảm biến và cơ cấu chấp hành
- Cảm biến góc lái và gia tốc ngang: giúp hệ thống xác định trạng thái chuyển động.
- Mô-tơ chấp hành: gắn với thanh dẫn hướng bánh sau, thay đổi góc bánh sau theo lệnh ECU.
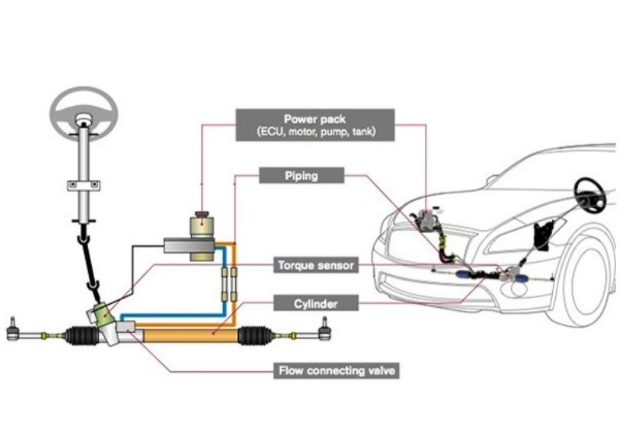
5. Hệ thống điều khiển
ECU kết hợp dữ liệu tốc độ, góc lái, gia tốc ngang để tính góc lái tối ưu.
Hệ thống đảm bảo:
- Ổn định hướng lái khi vào cua tốc độ cao.
- Cải thiện độ linh hoạt khi lái xe trong đô thị.
- Giảm mệt mỏi cho người lái và tăng độ chính xác điều khiển.
6. Hình minh họa
Hình 3: Sơ đồ nguyên lý hệ thống lái 4 bánh chủ động
III. Tiêu chuẩn, xu hướng và thách thức
- Tiêu chuẩn kỹ thuật: đáp ứng yêu cầu ISO về an toàn và điều khiển ổn định thân xe (ISO 26262 – Functional Safety).
- Xu hướng phát triển: kết hợp với trí tuệ nhân tạo và hệ thống camera cảm biến để dự đoán mặt đường.
- Thách thức: chi phí cao, độ tin cậy của cảm biến và khả năng bảo trì phức tạp.
Tài liệu liên quan:
-

Tài liệu sưu tầm. Báo cáo đăng kiểm
37 19 -
Tiểu luận công nghệ chế tạo động cơ 2
41 21 -
Chương 01 - Những Vấn Đề Cơ Bản Trong Thiết Kế Máy (ĐHGTVT). Môn Chi tiết máy (GTVT) | Trường Đại học Giao thông Vận tải.
91 46 -

Thiết kế hệ dẫn động cho máy khuấy dạng đứng - HGT. Môn Chi tiết máy (GTVT) | Trường Đại học Giao thông Vận tải.
83 42