Thiết kế hệ thống điều khiển_Pham Duc An| Bài giảng Nhập môn Cơ điện tử CTTT (Fundamental of Mechatronics)| Trường Đại học Bách Khoa Hà Nội
Khái niệm Hệ thống điều khiển?
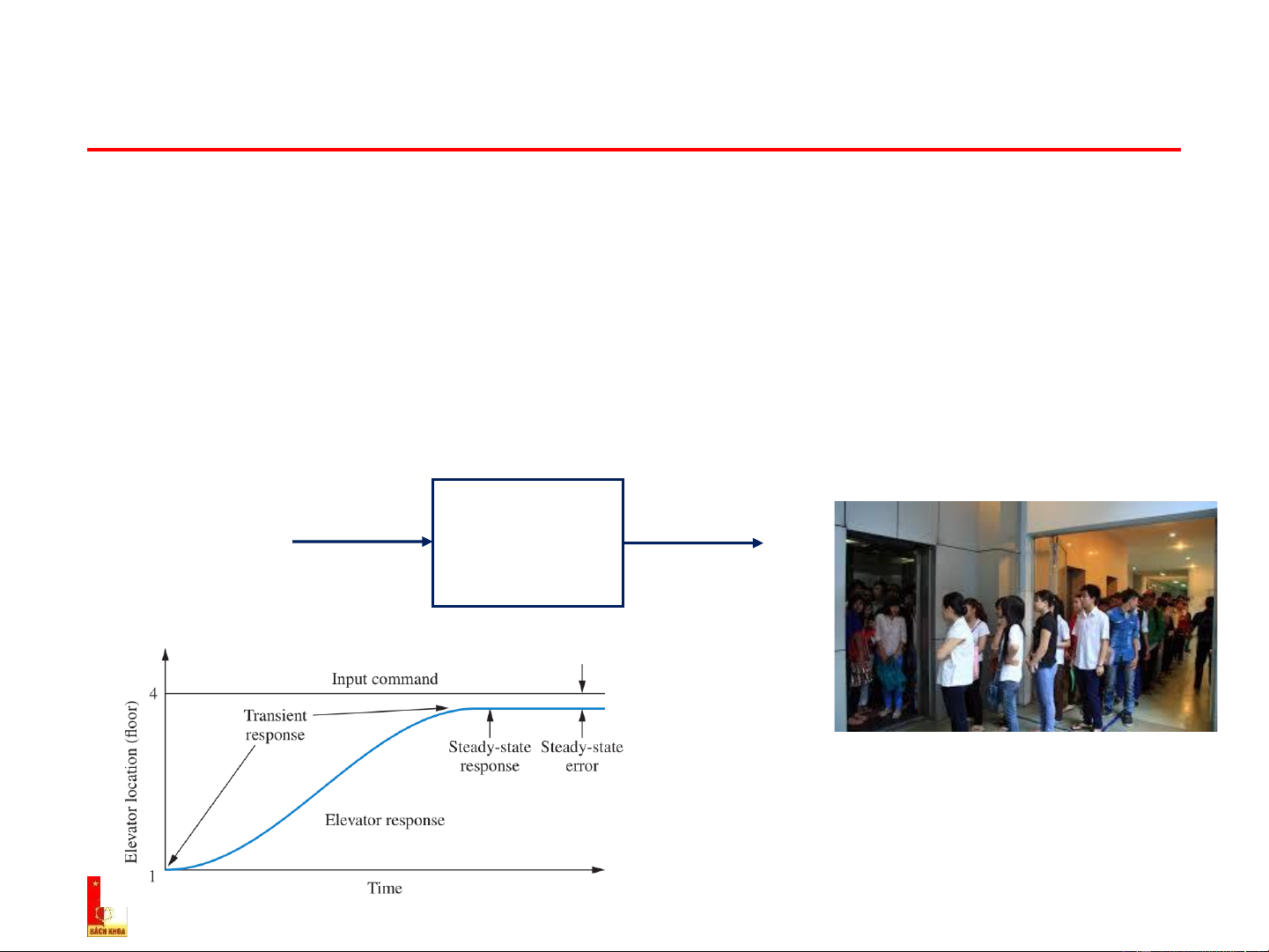
Một hệ thống điều khiển bao gồm các thành phần (Subsystems) và các mô hình xử lý (processes / plants) được kết hợp với nhau, nhằm đạt được ĐẦU RA (output) mong muốn với các CHỈ TIÊU ĐỘNG HỌC (performance) phù hợp, tương ứng với ĐẦU VÀO (input) xác định.
Môn: Nhập môn Cơ điện tử CTTT (Fundamental of Mechatronics) 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:







Preview text:
BÀI GIẢNG MÔN HỌC
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN (ME4235) Nội dung Lý thuyết:
Mô hình động học của hệ thống
Đáp ứng của hệ thống và các chỉ tiêu chất lượng cơ bản
Một số phương pháp thiết kế bộ điều khiển
Bài tập: Sử dụng phần mềm Matlab/Simulink để mô phỏng đáp ứng của hệ thống điều khiển
Project (tùy chọn):
Phân tích mô hình và sử dụng Matlab lập các hệ điều khiển
• Tốc độ của động cơ DC bằng bộ điều khiển PID số.
• Chính xác vị trí của một hệ truyền động cơ khí
• Cân bằng con lắc ngược như Segway sử dụng động cơ 1 chiều.
• Hệ điều khiển cho hệ thống driving simulator
• Điều khiển ô tô tracking theo một quỹ đạo định trước.
• Điều khiển ô tô tự lái tránh vât cản (sử dụng ultrasonic or camera)
• Điều khiển hệ tự cân bằng sử dụng gyroscope.
Triển khai bộ điều khiển trên các vi điều khiển AVR (Arduino), hoặc máy tính nhúng Beagle Bone, Raspberry Pi. Đánh giá:
Thi giữa kỳ (Có thể thay thế bằng kết quả thực hiện Project! – 30%) Thi cuối kỳ (70%)
Thiết kế hệ thống điều khiển – ME4235 2 Tài liệu tham khảo
Nguyễn Doãn Phước: Lý thuyết điều khiển tuyến tính, NXB KH&KT, 2007.
Nguyễn Phùng Quang: Matlab & Simulink dành cho kỹ sư điều
khiển tự động, NXB KH&KT, 2006.
Norman S. Nise: Control Systems Engineering, 7th, John Wiley & Sons Inc., 2015.
Gene F. Franklin, J. David Powel, Abbas Emami-Naeini:
Feedback control of dynamic systems, 7th, Pearson Higher Education, 2015.
Thiết kế hệ thống điều khiển – ME4235 3 Giới thiệu
Khái niệm Hệ thống điều khiển?
Một hệ thống điều khiển bao gồm các thành phần (Subsystems) và các
mô hình xử lý (processes / plants) được kết hợp với nhau, nhằm đạt được
ĐẦU RA (output) mong muốn với các CHỈ TIÊU ĐỘNG HỌC
(performance) phù hợp, tương ứng với ĐẦU VÀO (input) xác định. Đầu vào Hệ thống Đầu ra điều khiển (Mang thông tin về đầu ra mong muốn) Mục đích sử dụng - Thoải mái - Nhanh chóng - An toàn
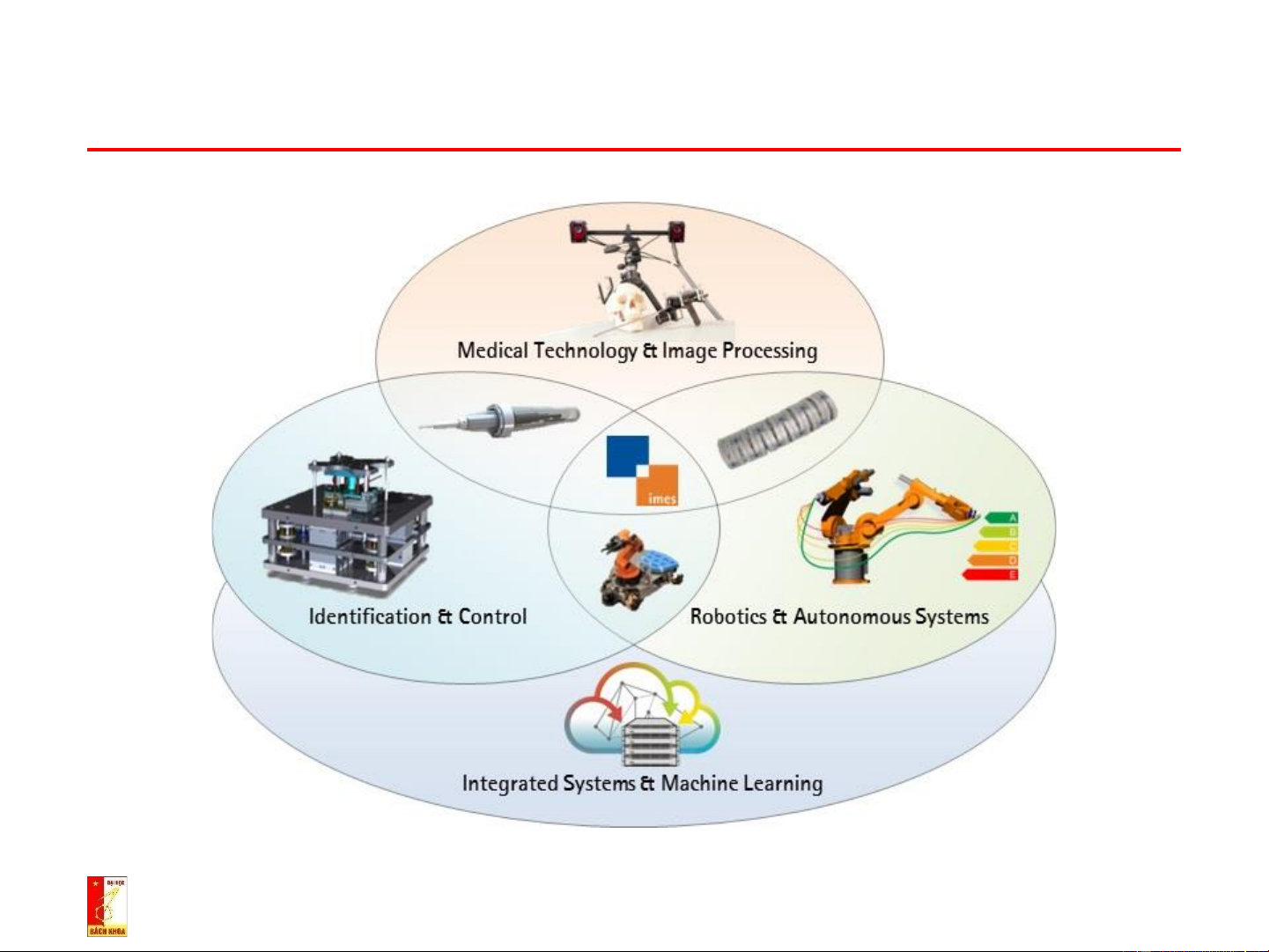
Thiết kế hệ thống điều khiển – ME4235 4 Mechatronics
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 5
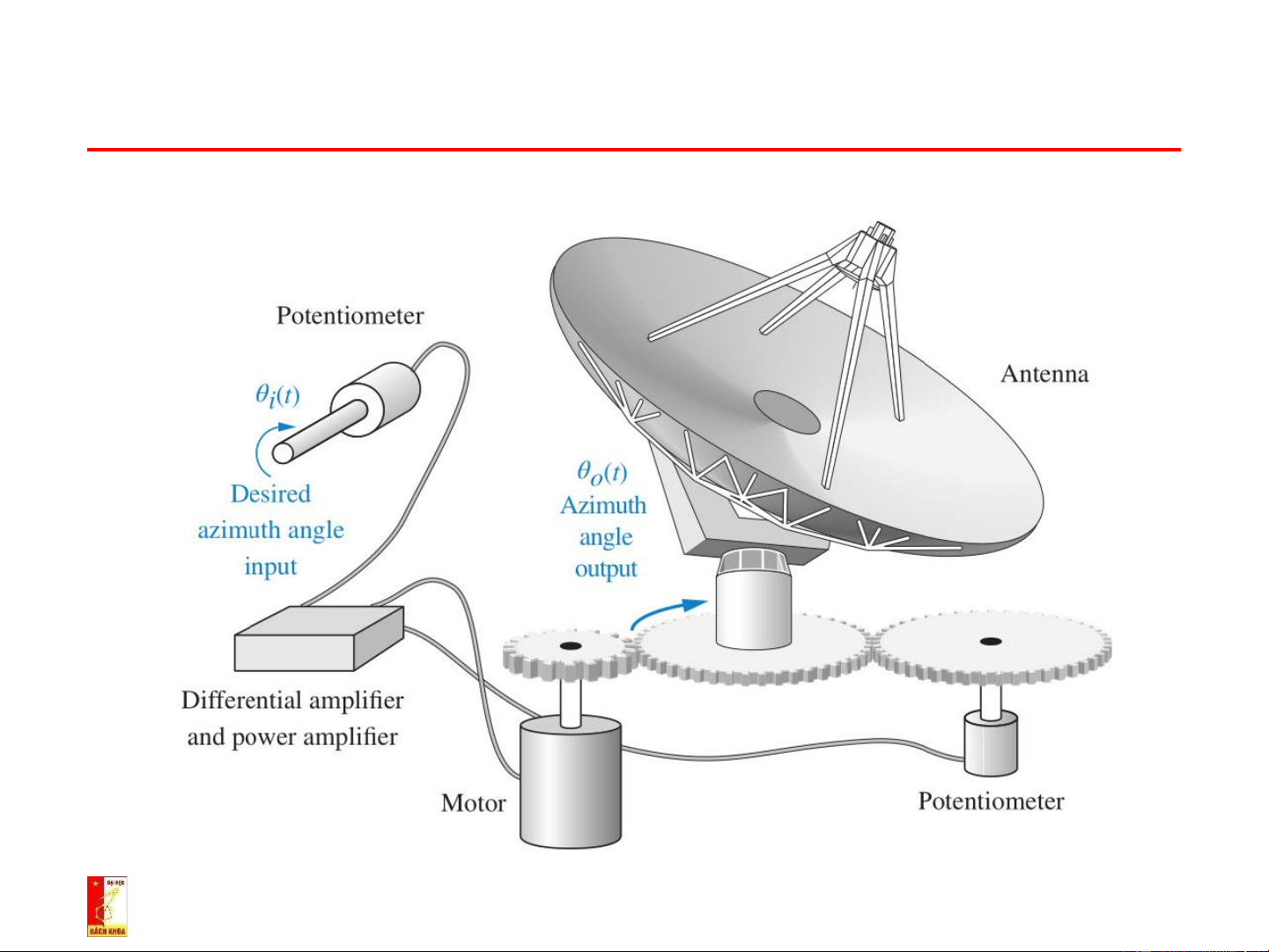
Ví dụ hệ thống điều khiển Antenna (1)
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 6
Phân tích hệ thống điều khiển vị trí
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 7
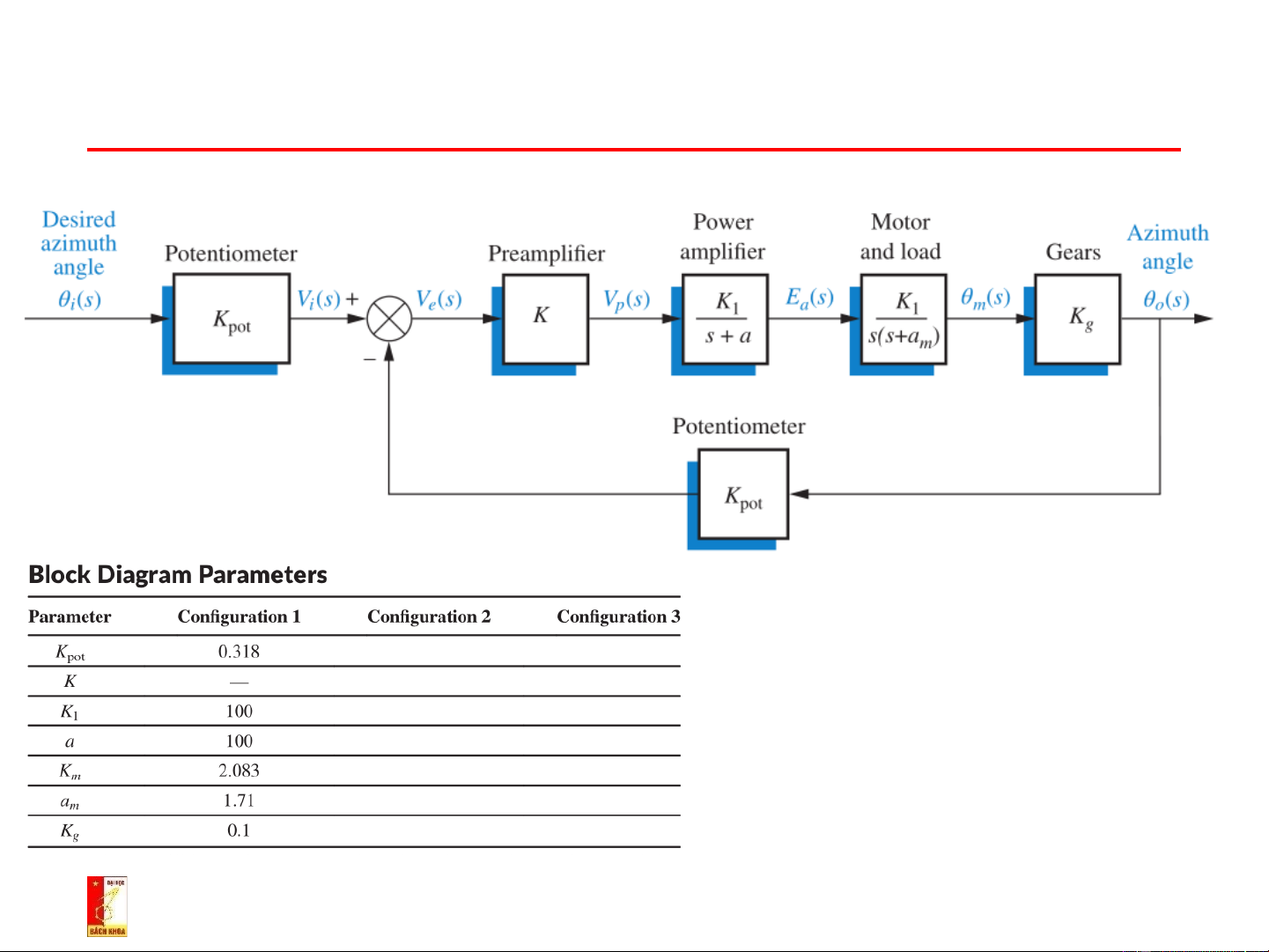
Ví dụ hệ thống điều khiển Antenna (2)
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 8
Ví dụ hệ thống điều khiển Antenna (3)
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 9
Hệ điều khiển mức nước
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 10
Áp xuất, nhiệt độ, dòng chảy
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 11 Tốc độ
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 12
Hệ thống điều khiển nhiệt độ phòng
Thiết kế hệ thống điều khiển – ME4235
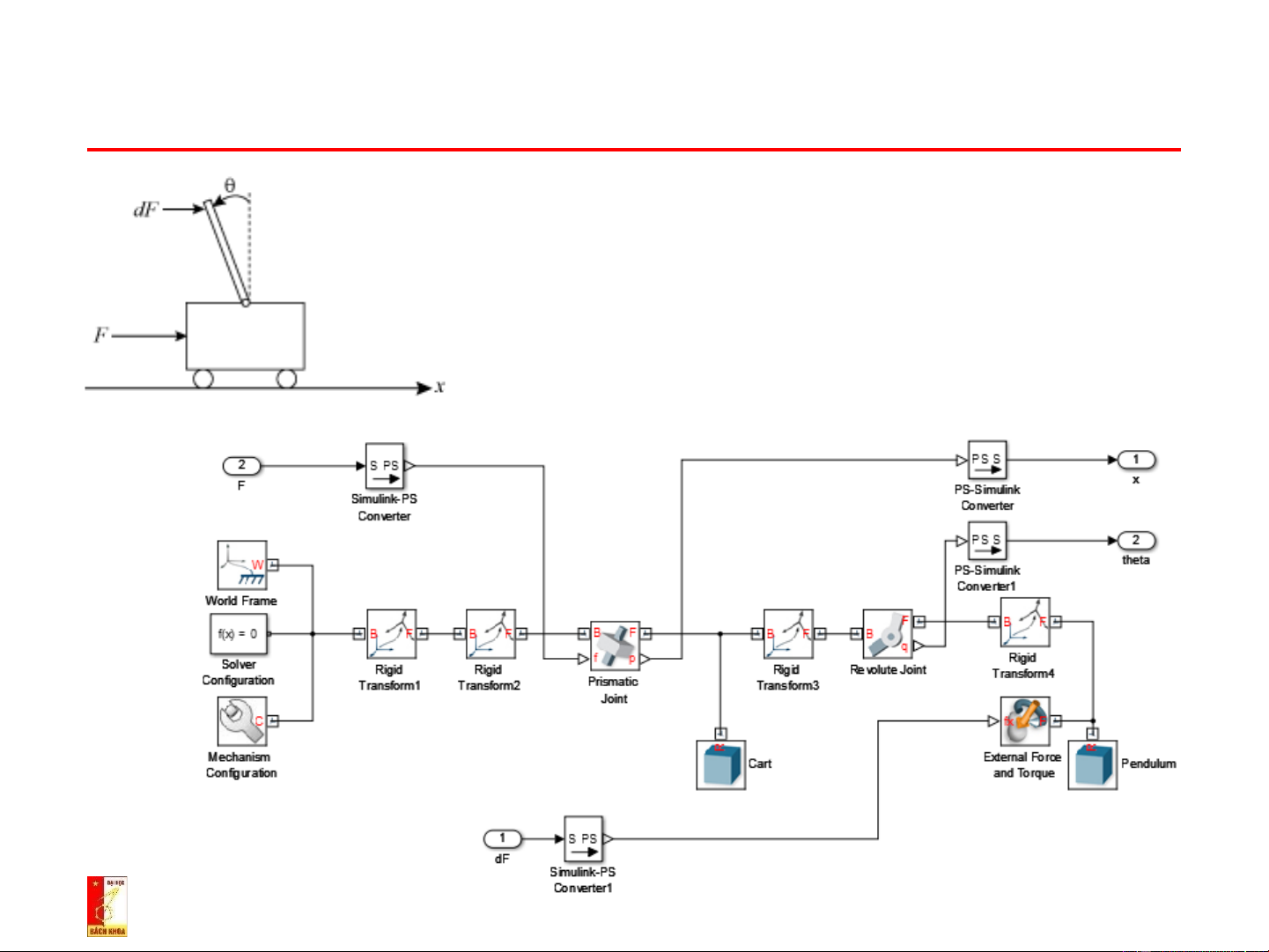
TS. Phạm Đức An – ĐHBK Hà Nội 13 Con lắc ngược
https://www.mathworks.com/help/control/examples/control-of-an-inverted-pendulum-on-a-cart.html
Thiết kế hệ thống điều khiển – ME4235
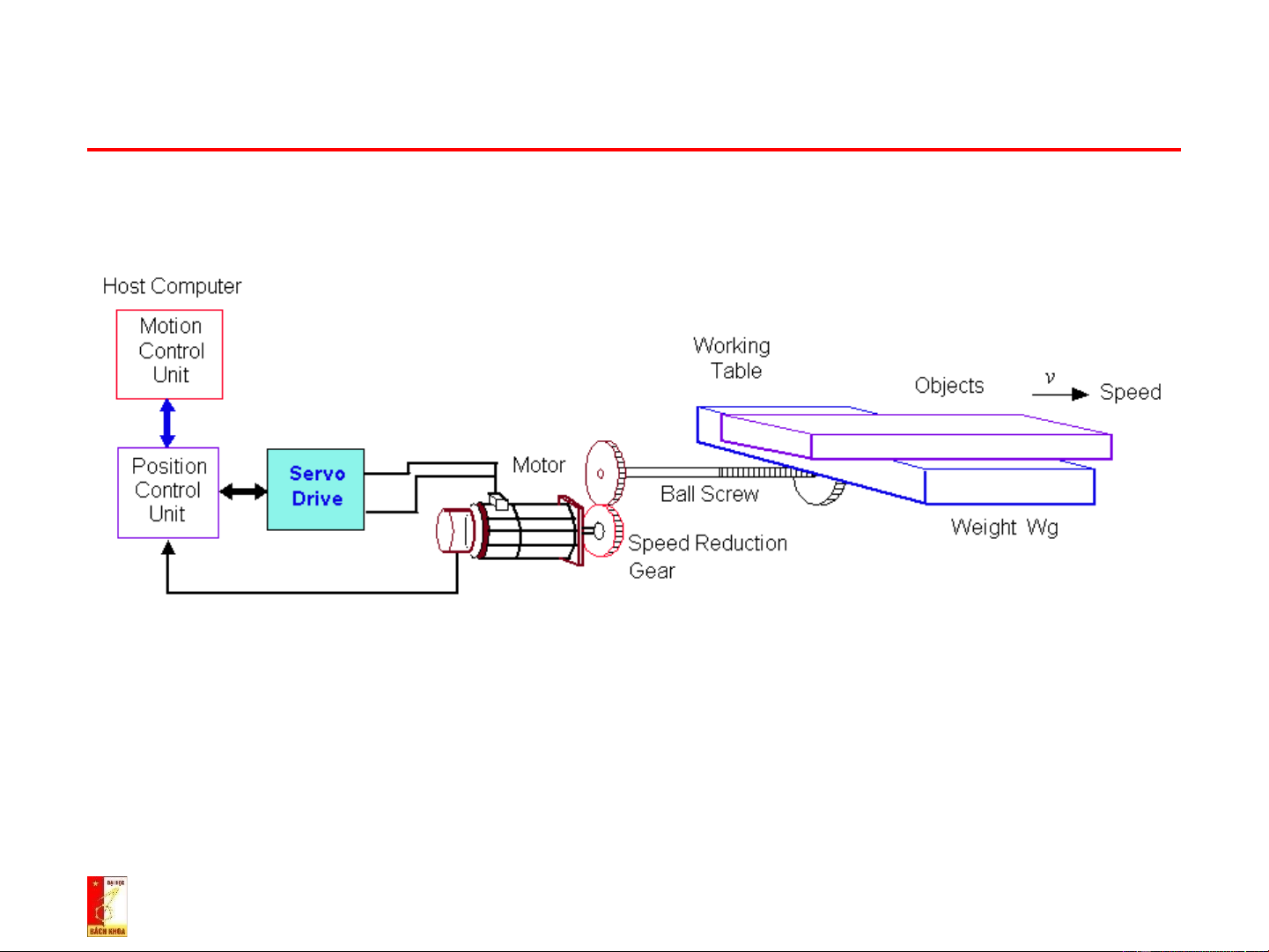
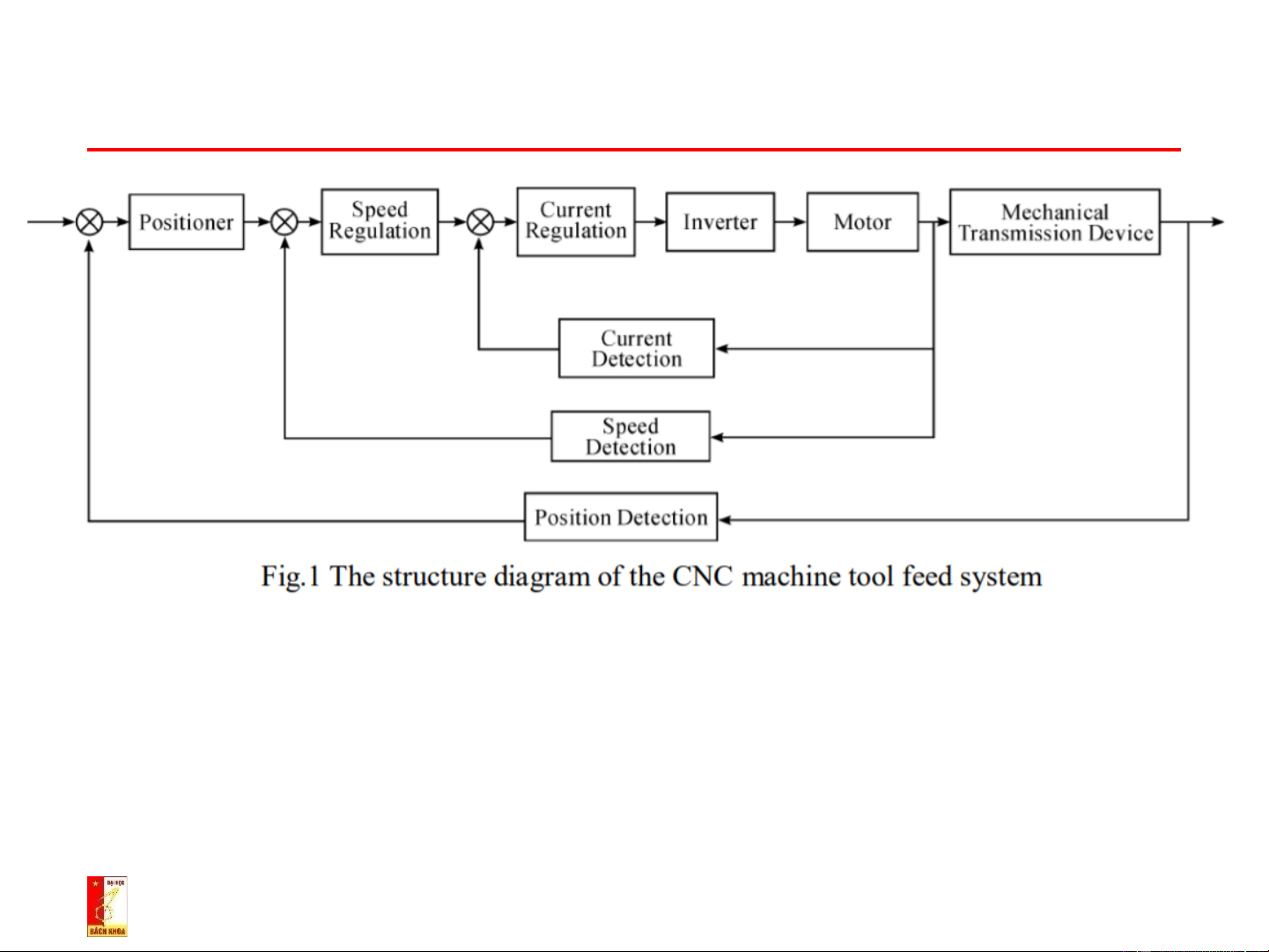
TS. Phạm Đức An – ĐHBK Hà Nội 14 CNC machine
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 15
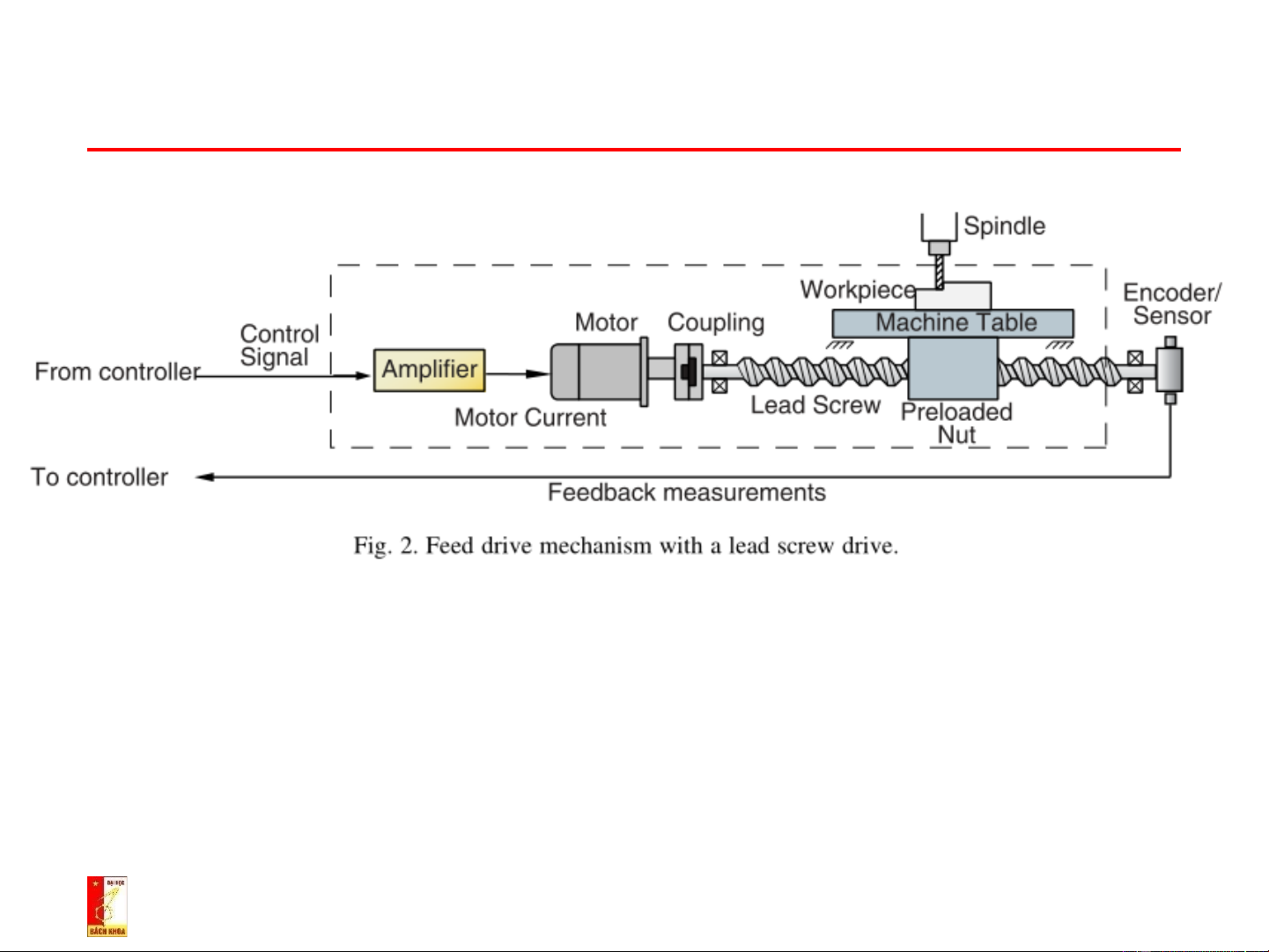
Mô hình động học hệ thống truyền động CNC
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 16
Mô hình động học hệ thống truyền động CNC
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 17 Giới thiệu
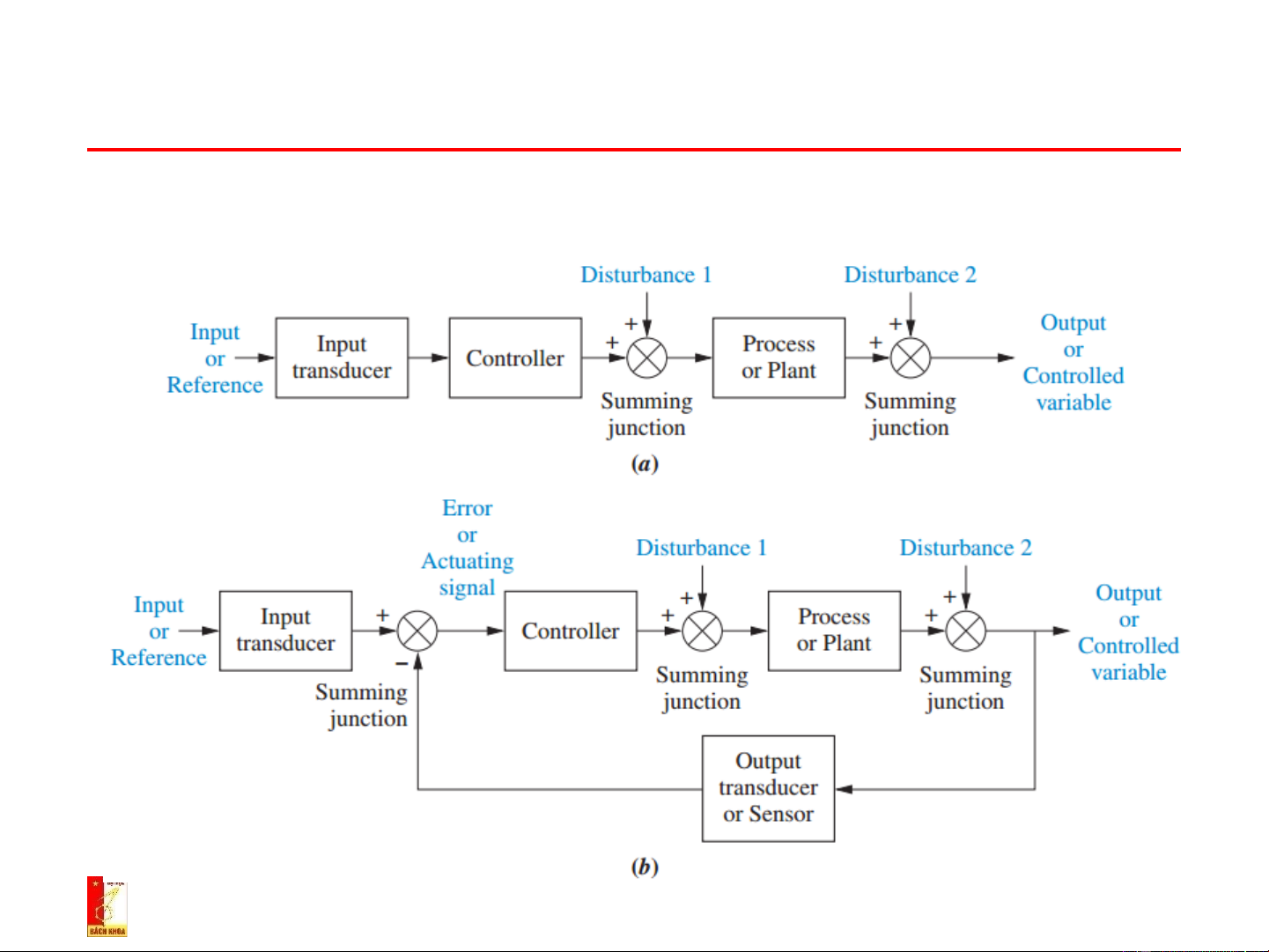
Các thành phần của hệ thống điều khiển
Thiết kế hệ thống điều khiển – ME4235 18 Giới thiệu
Tại sao cần các Hệ thống điều khiển?
Khuếch đại công suất
Khả năng vận hành các hệ thống kỹ thuật từ xa
Mang lại sự đơn giản và thuận tiện khi vận hành các hệ thống kỹ thuật
Bù ảnh hưởng của các loại nhiễu
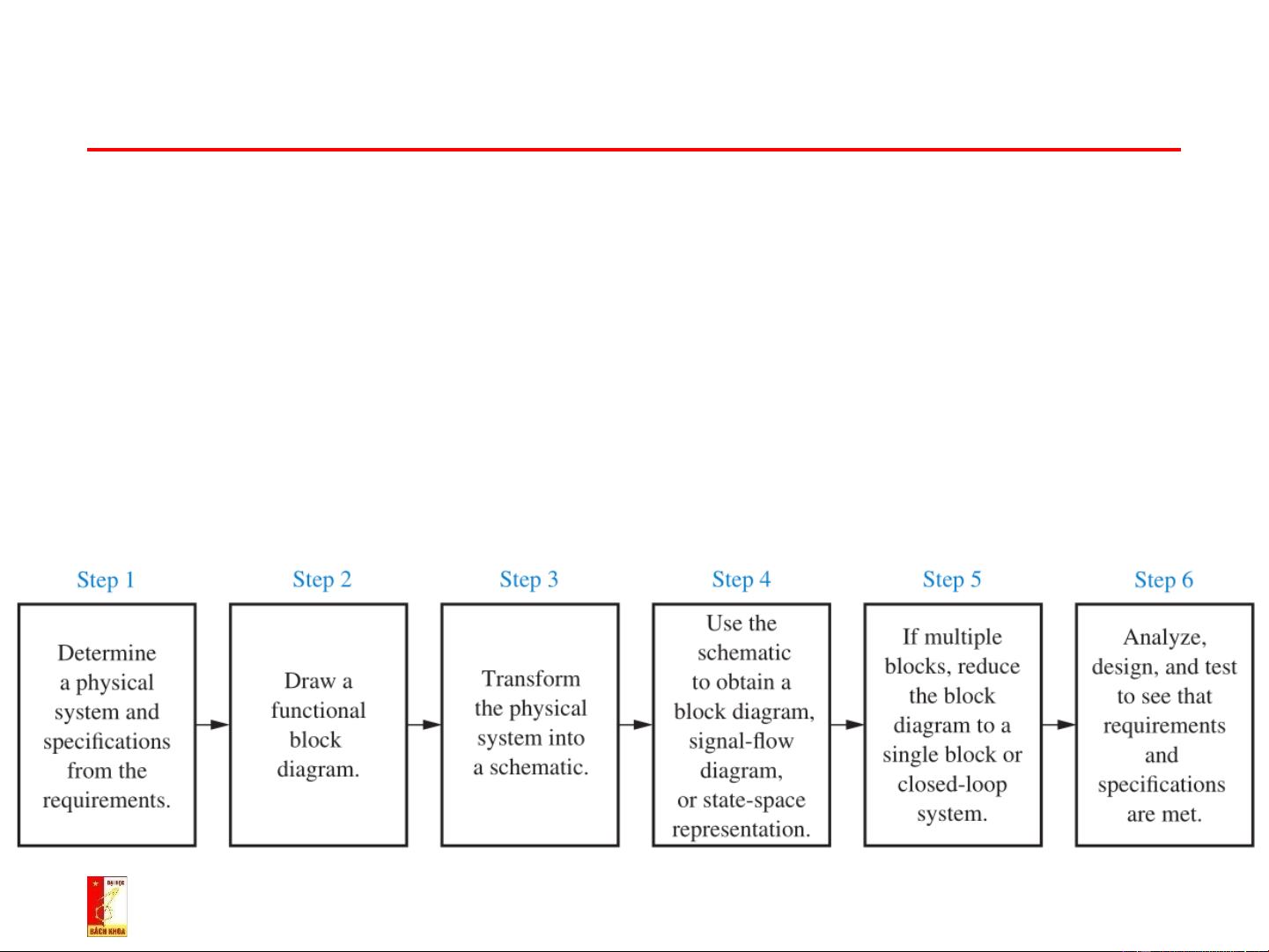
Các bước thiết kế hệ thống điều khiển
Thiết kế hệ thống điều khiển – ME4235 19
Các dạng tín hiệu Input để phân tích mô hình
Thiết kế hệ thống điều khiển – ME4235
TS. Phạm Đức An – ĐHBK Hà Nội 20
Tài liệu liên quan:
-

Câu hỏi ôn tập môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
204 102 -

Chương 5 - Hệ xử lý ảnh môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
158 79 -
Bài giảng thực hành lắp đặt xe tự hành môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
107 54 -

Đạo hàm và tích phân | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
224 112 -

Số gần đúng và sai số | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
239 120