Thiết kế hệ truyền động điện cho băng tải sử dụng động cơ không đồng bộ 3 pha trong việc vận chuyển thùng táo từ khâu sát khuẩn vào kho lưu trữ trong nhà máy sản xuất khẩu táo | Đồ án Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Thiết kế hệ thống truyền động điện điều khiển động cơ vận chuyển thùng hàng táo khối lượng 40kg trên băng tải. Tài liệu được sưu tầm gồm 20 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Truyền động điện 1 5 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:









Preview text:
lOMoAR cPSD| 58794847
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
KHOA ĐIỆN – ĐIỆN TỬ
ĐỒ ÁN TRUYỀN ĐỘNG ĐIỆN
NGÀNH: CÔNG NGHỆ KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HOÁ ĐỀ TÀI:
THIẾT KẾ HỆ TRUYỀN ĐỘNG ĐIỆN CHO BĂNG TẢI
SỬ DỤNG ĐỘNG CƠ KHÔNG ĐỒNG BỘ 3 PHA TRONG
VIỆC VẬN CHUYỂN THÙNG TÁO TỪ KHÂU SÁT
KHUẨN VÀO KHO LƯU TRỮ TRONG NHÀ MÁY SẢN XUẤT KHẨU TÁO
Người hướng dẫn : T.S Đỗ Hoàng Ngân Mi
Sinh viên thực hiện Mã sinh viên
Nguyễn Anh Dũng 22115055122217
Trần Quốc Huy 22115055122233 Lớp học phần 224DATDD2003 Đà Nẵng, 4/2025 MỤC LỤC
MỤC LỤC.....................................................................................................................1
TÓM TẮT......................................................................................................................3 lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
NHIỆM VỤ ĐỒ ÁN TRUYỀN ĐỘNG ĐIỆN..............................................................4
MỞ ĐẦU.......................................................................................................................5
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI............................................................................6
1.1. Tính cấp thiết và nguyên nhân chọn đề tài.....................................6
1.1.1. Tính cấp thiết...........................................................................6
1.1.2. Nguyên nhân chọn đề tài.........................................................6
1.2. Phạm vi và đối tượng nghiên cứu...................................................6
1.3. Triển khai đề tài.............................................................................6
1.3.1. Tổng quan................................................................................6
1.3.2. Ý nghĩa mà hệ thống mang lại.................................................7
1.3.3. Khó khăn mang lại...................................................................8
1.4. Đề xuất ý tưởng đề tài....................................................................8
1.4.1. Giới thiệu.................................................................................8
1.4.2. Mục tiêu đề tài.........................................................................8
1.4.3. Khảo sát thực tế.......................................................................9
1.4.4. Phương pháp nghiên cứu.........................................................9
1.5. Tổng quan sơ đồ mô hình hệ thống................................................9
1.6. Nghiên cứu thực nghiệm và ý nghĩa thực tiễn................................9
1.6.1. Nghiên cứu thực nghiệm.........................................................9
1.6.2. Ý nghĩa thực tiễn...................................................................10
CHƯƠNG 2. TÍNH TOÁN VÀ LỰA CHỌN THIẾT BỊ ĐỀ TÀI..............................11
2.1. Tính toán lựa chọn băng tải..........................................................11
2.1.1. Bài toán trong thực tế............................................................11
2.1.2. Tính toán tốc độ và khối lượng cho băng tải..........................11
2.2. Sơ đồ tổng thể của hệ thống.........................................................13
2.3. Chọn phương án truyền động.......................................................14
2.4. Tính toán chọn công suất động cơ................................................14
2.5. Tính mô men tổng........................................................................15
2.6. Kiểm nghiệm động cơ..................................................................16
CHƯƠNG 3. XÂY DỰNG THUẬT TOÁN VÀ CHƯƠNG TRÌNH ĐIỀU KHIỂN
.....................................................................................Error! Bookmark not defined.
3.1. Thiết kế mạch động lực................................................................17
3.2. Thiết kế mạch điều khiển.............................................................22
3.3. Mạch PID.....................................................................................22 lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
3.3.1. Nguyên lý hoạt động..............................................................22
3.3.2. Cấu trúc của bộ điều khiển PID.............................................23
3.3.3. Lợi ích của bộ điều khiển PID...............................................23
3.3.4. Thiết kế bộ điều khiển PID điều khiển tốc độ động cơ DC12V
...............................................................................................23
3.4. Chương trình điều khiển của mô hình................Error! Bookmark not defined.
CHƯƠNG 4. MÔ HÌNH HÓA MÔ PHỎNG VÀ KẾT QUẢ......................................25
4.1. Mô hình hóa.................................................................................25
4.1.1. Mô hình hóa động cơ DC......................................................25
4.1.2. Mô hình hóa bộ điều khiển PID.............................................27
4.1.3. Mô hình hóa bộ điều khiển góc mở Thyristor........................28
4.2. Mô phỏng.....................................................................................28
4.2.1. Mô phỏng mạch động lực......................................................28
4.2.2. Mô phỏng mạch điều khiển...................................................30
4.2.3. Mô phỏng hệ thống................................................................30
4.3. Mô hình thực tế............................................................................33
4.4. Giao diện điều khiển Matlab GUI................................................33
4.5. Phân tích và đánh giá kết quả.......................................................34
TÀI LIỆU THAM KHẢO............................................................................................35 TÓM TẮT
Tên đề tài: Thiết kế hệ truyền động điện cho băng tải sử dụng động cơ không đồng bộ 3
pha trong việc vận chuyển thùng táo từ khâu sát khuẩn vào kho lưu trữ trong nhà máy sản xuất khẩu táo.
Sinh viên thực hiện: Nguyễn Anh Dũng MSV: 22115055122217 Trần Quốc Huy MSV:
22115055122233 Lớp học phần: 224DATDD2003
Hướng đi chính của đề tài là thiết kế và thi công hệ thống truyền động điện sử dụng động
cơ điện một chiều điều khiển tốc độ băng chuyền vận chuyển thùng hàng đến khâu phân loại và đóng gói.
Cấu trúc nội dung báo cáo:
Chương 1: Tổng quan đề tài.
Chương 2: Tính toán, lựa chọn động cơ.
Chương 3: Thiết kế, lựa chọn thiết bị. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
Chương 4: Mô hình hóa mô phỏng và kết quả. Tài liệu tham khảo.
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ
CỘNG HÒA XÃ HÔI CHỦ NGHĨA VIỆT NAM
THUẬT Độc lập - Tự do - Hạnh phúc
KHOA ĐIỆN - ĐIỆN TỬ
NHIỆM VỤ ĐỒ ÁN TRUYỀN ĐỘNG ĐIỆN
Giảng viên hướng dẫn: T.S Đỗ Hoàng Ngân Mi Sinh viên thực hiện: Nguyễn Anh Dũng Mã SV: 22115055122217 Trần Quốc Huy Mã SV: 22115055122233
1. Tên đề tài: Thiết kế hệ truyền động điện cho băng tải sử dụng động cơ không đồng bộ
ba pha trong việc vận chuyển thùng táo từ khâu sát khuẩn vào kho lưu trữ trong nhà
máy sản xuất khẩu táo .
Băng chuyền vận chuyển thùng hàng là một hệ thống quan trọng trong quá trình sản
xuất ở mọi lĩnh vực. Nó được sử dụng để vận chuyển các loại hàng hóa trong quá trình
sản xuất đến nơi phân loại và đóng gói. Hệ thống giúp tăng hiệu suất vận chuyển, giảm
thời gian vận chuyển, nhân công và chi phí lao động, giảm nguy cơ hỏng hóc và mất mát
trong quá trình vận chuyển.
2. Yêu cầu công nghệ:
- Yêu cầu tổng quan: Ổn định tốc độ động cơ không đồng bộ ba pha khi có tải
hoặc không có tải trên băng chuyền. - Yêu cầu kĩ thuật:
Phần cứng: Vi điều khiển Arduino Uno R3, Cảm biến hồng ngoại, Động
cơ băng tải, Encoder, Bộ điều khiển tốc độ. Phần mềm: Matlab Gui, Arduino IDE.
3. Nội dung đồ án:
Chương 1: Tổng quan đề tài.
Chương 2: Tính toán, lựa chọn động cơ.
Chương 3: Thiết kế, lựa chọn thiết bị.
Chương 4: Mô hình hóa mô phỏng và kết quả. Tài liệu tham khảo.
4. Các sản phẩm dự kiến: - Mô hình hệ thống.
- Báo cáo (Thiết kế và thuyết minh, bản vẽ nguyên lý, bản vẽ lắp ráp, lưu đồ
thuật toán và chương trình điều khiển).
- Chương trình điều khiển trên phần mềm lập trình. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
Đà Nẵng, ngày tháng năm 2024 Trưởng Bộ môn
Người hướng dẫn lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển. MỞ ĐẦU
Trong bối cảnh phát triển công nghiệp hiện đại, việc tối ưu hóa quá trình sản xuất
và vận chuyển là một yếu tố quan trọng nhằm nâng cao hiệu quả kinh tế và chất lượng
sản phẩm. Hệ thống truyền động điện đóng vai trò then chốt trong việc điều khiển các
thiết bị cơ khí, trong đó có băng chuyền vận chuyển. Đặc biệt, việc sử dụng động cơ
không đồng bộ ba pha để điều khiển tốc độ băng chuyền mang lại nhiều ưu điểm về hiệu suất và độ bền.
Báo cáo này trình bày quá trình thiết kế hệ thống truyền động điện sử dụng động cơ
không đồng bộ ba pha để điều khiển tốc độ băng chuyền vận chuyển thùng táo. Mục tiêu
của hệ thống là đảm bảo băng chuyền hoạt động ổn định, hiệu quả, với khả năng điều
chỉnh tốc độ linh hoạt theo yêu cầu sản xuất. Báo cáo sẽ đi sâu vào phân tích các yêu
cầu kỹ thuật, lựa chọn thiết bị phù hợp, thiết kế mạch điều khiển, và đánh giá hiệu suất của hệ thống.
Thông qua việc nghiên cứu và triển khai hệ thống này, nhóm em hy vọng sẽ đóng
góp vào việc nâng cao hiệu quả vận hành của dây chuyền sản xuất, đồng thời cung cấp
giải pháp kỹ thuật tiên tiến và bền vững cho ngành công nghiệp vận chuyển. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI
1.1. Tính cấp thiết và nguyên nhân chọn đề tài
1.1.1. Tính cấp thiết
Trong nền công nghiệp hiện đại, quá trình tự động hóa sản xuất đóng vai trò quan
trọng trong việc tăng năng suất và giảm chi phí lao động.
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha với khả năng
điều khiển tốc độ linh hoạt là một giải pháp tối ưu cho các yêu cầu này. Các ưu điểm nổi
bật của động không đồng bộ ba pha bao gồm độ bền và tuổi thọ, khả năng đáp ứng
nhanh và dễ dàng tích hợp với các hệ thống điều khiển tự động hiện đại. Điều này giúp
nâng cao hiệu quả vận hành và giảm thiểu hư hỏng, tổn thất trong quá trình vận chuyển.
1.1.2. Nguyên nhân chọn đề tài
Việc chọn đề tài "Thiết kế hệ thống truyền động điện sử dụng động cơ không đồng
bộ ba pha điều khiển tốc độ băng chuyền vận chuyển thùng táo" xuất phát từ nhiều lý
do quan trọng và thiết yếu, phản ánh nhu cầu cấp bách và tiềm năng ứng dụng trong
ngành công nghiệp hiện đại.Hiện nay trên thế giới sử dụng đến 80% động cơ không đồng
bộ ba pha và tiêu thụ đến 40-45% tổng năng lượng điện toàn cầu. Cụ thể, các nguyên nhân chính bao gồm:
Tăng cường hiệu quả sản xuất: Hệ thống giúp tối ưu hóa quy trình vận
chuyển, giảm thời gian chờ đợi và tăng cường năng suất.
Đảm bảo chất lượng sản phẩm: Điều khiển tốc độ chính xác giúp hạn chế va
đập, hư hỏng, đảm bảo chất lượng thùng táo trong quá trình vận chuyển.
Giảm chi phí và năng lượng: Sử dụng động cơ điện hiệu suất cao và điều
khiển thông minh giúp tiết kiệm năng lượng và giảm chi phí vận hành.
Đáp ứng nhu cầu tự động hóa: Hệ thống dễ dàng tích hợp với các hệ thống
điều khiển tự động, phù hợp với xu hướng phát triển công nghiệp 4.0.
1.2. Phạm vi và đối tượng nghiên cứu
- Phạm vi: nghiên cứu, tính toán, thiết kế, chế tạo hệ thống. Hệ thống bao gồm
những phần chính như: băng tải,động cơ không đồng bộ ba pha, vi điều khiển
Arduino Uno R3, bộ điều khiển, Encoder,....
- Đối tượng nghiên cứu: hệ thống truyền động điện vận chuyển thùng hàng sử
dụng động cơ không đồng bộ ba pha. Hệ thống điều khiển bởi vi điều khiển Arduino.
1.3. Triển khai đề tài 1.3.1. Tổng quan
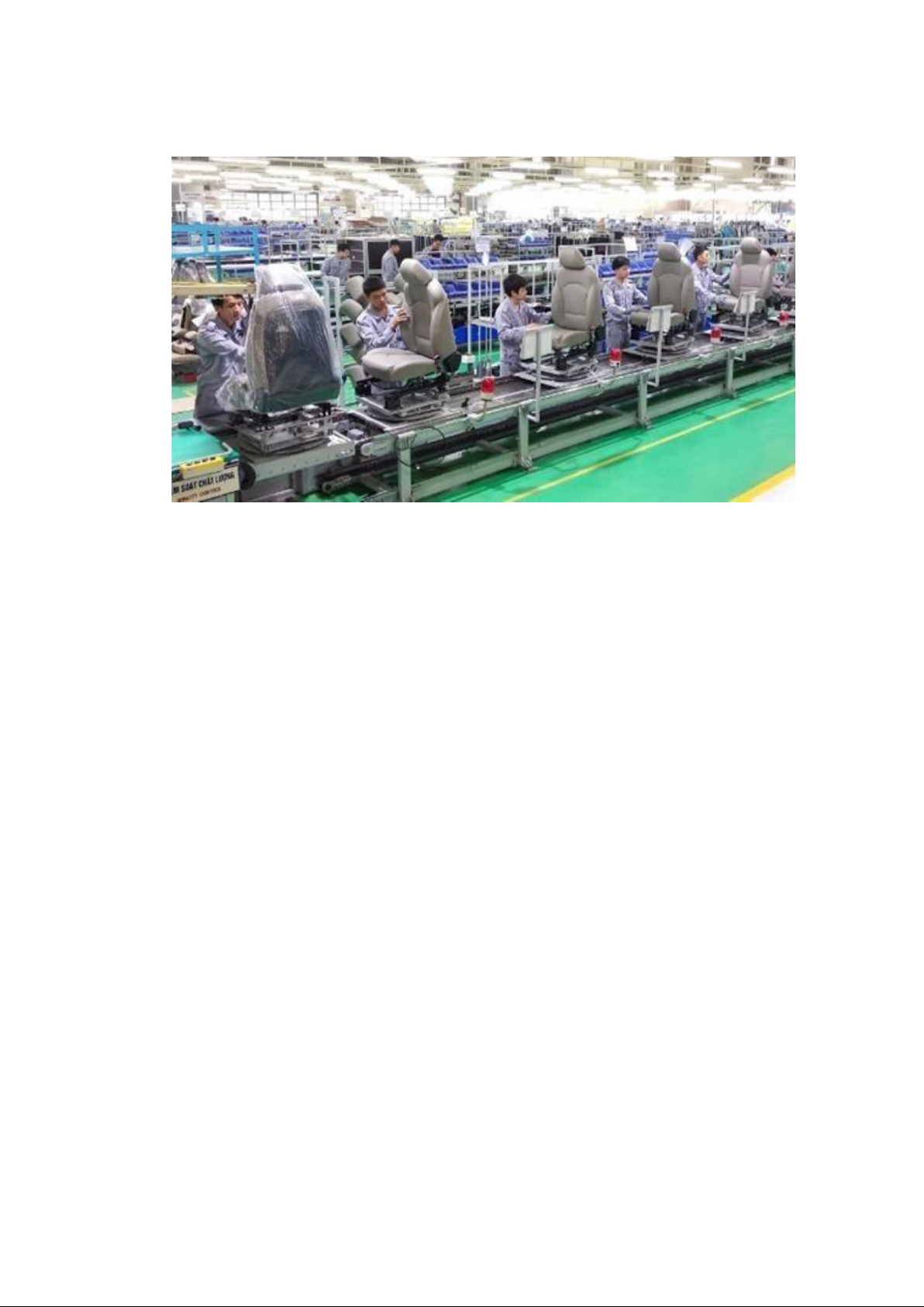
Hệ thống băng chuyền trong sản xuất là một thiết bị hoặc tổ hợp thiết bị cơ học dùng
để vận chuyển vật liệu hoặc sản phẩm từ điểm này sang điểm khác trong quá trình sản lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
xuất. Hệ thống này giúp tiết kiệm thời gian, giảm sức lao động, tăng hiệu quả sản xuất và đảm
bảo an toàn cho công nhân.
Hình 1.1. Băng chuyền vận chuyển hàng hóa trong sản xuất.
Một hệ thống băng chuyền trong sản xuất thường bao gồm các thành phần cơ bản sau: • Khung băng chuyền • Băng tải
• Động cơ và bộ truyền động • Bộ điều khiển • Hệ thống căng đai
1.3.2. Ý nghĩa mà hệ thống mang lại
Tự động hóa quá trình sản xuất: Băng chuyền giúp tự động hóa việc di chuyển các
sản phẩm hoặc nguyên vật liệu, giảm thiểu sự tham gia của con người và tăng tính liên
tục trong quá trình sản xuất.
Tăng năng suất: Nhờ việc di chuyển vật liệu liên tục và hiệu quả, băng chuyền giúp
tăng năng suất và giảm thời gian chờ đợi trong các công đoạn sản xuất.
Đảm bảo an toàn: Hệ thống băng chuyền được thiết kế để giảm thiểu rủi ro tai nạn
lao động, đảm bảo an toàn cho công nhân khi làm việc.
Đa dạng về ứng dụng: Băng chuyền có thể được sử dụng trong nhiều ngành công
nghiệp khác nhau như thực phẩm, dược phẩm, điện tử, ô tô, và nhiều lĩnh vực sản xuất khác.
Tiết kiệm chi phí: Bằng cách tối ưu hóa quá trình sản xuất và giảm thiểu lãng phí,
hệ thống băng chuyền giúp tiết kiệm chi phí vận hành và nâng cao hiệu quả kinh tế.
Linh hoạt và dễ dàng điều chỉnh: Hệ thống băng chuyền có thể được thiết kế theo
nhiều hình dạng và kích thước khác nhau để phù hợp với nhu cầu cụ thể của từng quy trình sản xuất. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
1.3.3. Khó khăn mang lại
Mặc dù hệ thống băng chuyền vận chuyển mang lại nhiều lợi ích, nhưng cũng
có một số khó khăn mà các doanh nghiệp cần phải đối mặt khi ứng dụng chúng.
Dưới đây là một số khó khăn phổ biến:
- Chi phí đầu tư ban đầu cao: Việc thiết kế, lắp đặt và vận hành một hệ thống
băng chuyền hiện đại đòi hỏi chi phí đầu tư ban đầu lớn . Đối với các doanh
nghiệp nhỏ và vừa, chi phí này có thể là một rào cản đáng kể.
- Bảo trì và sửa chữa: Hệ thống băng chuyền yêu cầu bảo trì định kỳ để đảm
bảo hoạt động liên tục và hiệu quả . Sự cố kỹ thuật hoặc hư hỏng có thể gây
gián đoạn quá trình sản xuất và đòi hỏi chi phí sửa chữa, thay thế linh kiện
- Không gian và cấu trúc nhà xưởng: Cần có đủ không gian và bố trí hợp lý
trong nhà xưởng để lắp đặt hệ thống băng chuyền . Đối với những nhà xưởng
có không gian hạn chế hoặc cấu trúc phức tạp, việc lắp đặt băng chuyền có thể gặp khó khăn
- Đào tạo nhân viên: Công nhân và kỹ thuật viên cần được đào tạo để vận
hành và bảo trì hệ thống băng chuyền . Đối với những công ty chưa có kinh
nghiệm, việc đào tạo này có thể mất nhiều thời gian và chi phí.
- Vấn đề an toàn: Hệ thống băng chuyền cần được thiết kế và lắp đặt sao cho
đảm bảo an toàn cho người sử dụng . Các biện pháp bảo vệ và quy trình an
toàn phải được tuân thủ nghiêm ngặt để tránh tai nạn lao động
1.4. Đề xuất ý tưởng đề tài
Từ tính cấp thiết hiện nay , nhóm bọn em đề xuất đề tài : “ Thiết kế hệ truyền động
điện cho băng tải sử dụng động cơ không đồng bộ ba pha trong việc vận chuyển thùng
táo từ khâu sát khuẩn vào kho lưu trữ trong nhà máy sản xuất khẩu táo ” 1.4.1. Giới thiệu
Trong bối cảnh hiện đại, ngành công nghiệp chế biến và vận chuyển thực phẩm đang
đứng trước yêu cầu tăng cường hiệu suất, đảm bảo chất lượng sản phẩm và tiết kiệm
năng lượng. Việc ứng dụng hệ thống truyền động điện sử dụng động cơ không đồng bộ
ba pha để điều khiển tốc độ băng chuyền vận chuyển thùng táo là một giải pháp tối ưu,
đáp ứng được các yêu cầu này.
1.4.2. Mục tiêu đề tài
- Thiết kế và triển khai hệ thống truyền động điện sử dụng động cơ không đồng
bộ ba pha để điều khiển tốc độ băng chuyền.
- Đảm bảo hệ thống hoạt động ổn định, hiệu quả và có khả năng điều chỉnh tốc
độ linh hoạt theo yêu cầu sản xuất.
- Đánh giá hiệu suất của hệ thống qua các thử nghiệm thực tế.
1.4.3. Khảo sát thực tế
- Lựa chọn và thiết kế động cơ không đồng bộ ba pha phù hợp.
- Thiết kế hệ thống điều khiển tốc độ bằng các bộ điều khiển hiện đại như PI. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
- Tích hợp hệ thống cảm biến và thiết bị đo lường.
- Thử nghiệm và đánh giá hiệu suất hệ thống trong điều kiện vận hành thực tế.
1.4.4. Phương pháp nghiên cứu Thiết kế hệ thống:
• Lựa chọn động cơ: Chọn động cơ không đồng bộ ba pha có công suất, mô-
men xoắn và tốc độ phù hợp với yêu cầu vận chuyển thùng táo.
• Thiết kế mạch điều khiển: Sử dụng bộ điều khiển PI và các công cụ lập trình như vi điều khiển
• Tích hợp cảm biến: Lắp đặt cảm biến tốc độ ( encoder ) và vị trí để thu thập
dữ liệu và điều chỉnh hệ thống.
Xây dựng và lắp đặt: Lắp ráp hệ thống cơ khí: Tích hợp động cơ, băng chuyền và
các thành phần cơ khí khác.
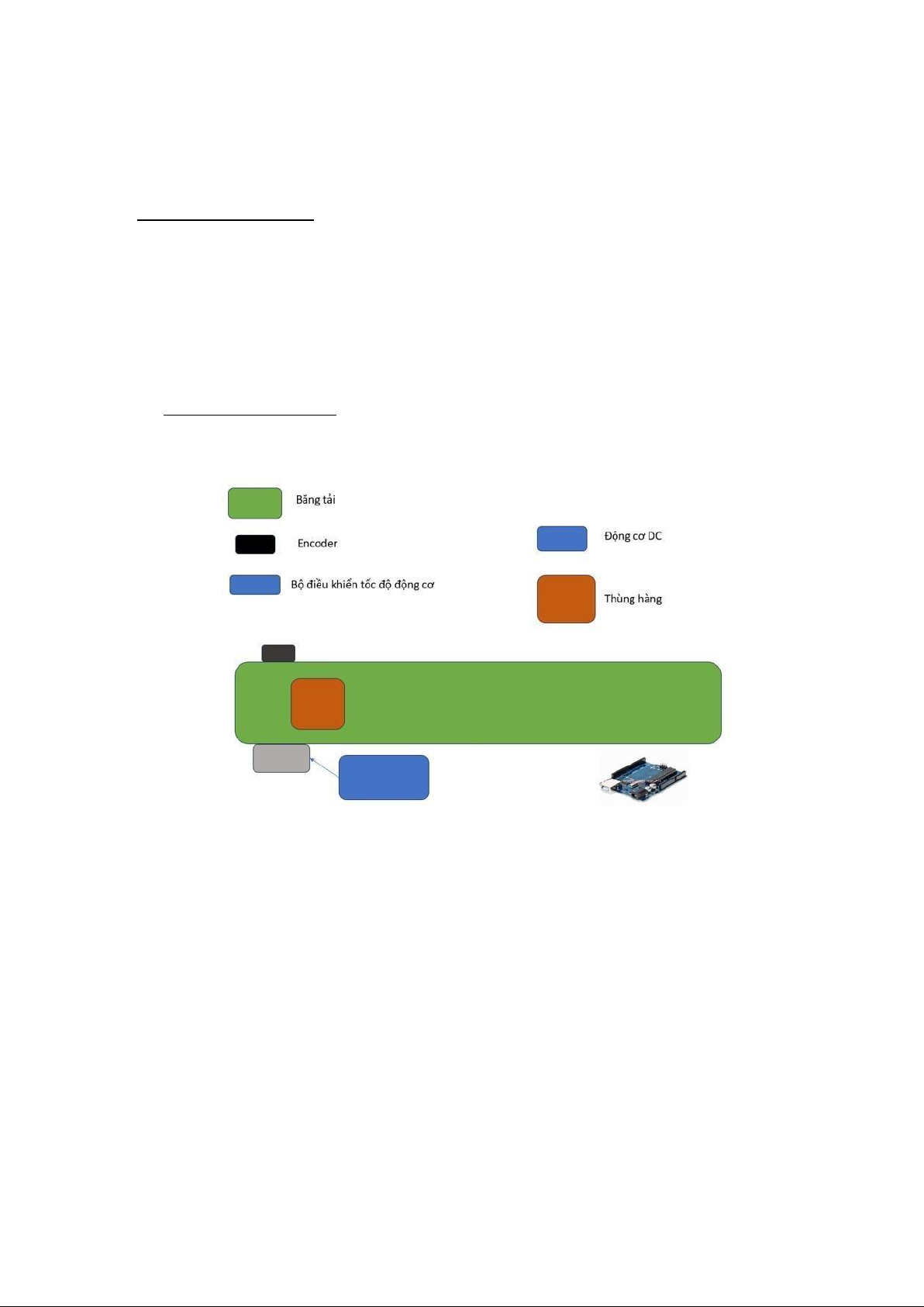
1.5. Tổng quan sơ đồ mô hình hệ thống
Hình 1.2. Phác thảo sơ đồ mô hình hệ thống.
1.6. Nghiên cứu thực nghiệm và ý nghĩa thực tiễn
1.6.1. Nghiên cứu thực nghiệm
- Tham khảo , tìm hiểu các dây chuyền băng tải trong các nhà máy sản xuất để
đánh giá ưu và nhược điểm trong thực tế
- Xem và nghiên cứu các hệ thống băng tải của các hãng ở Việt Nam như : Công
ty băng tải Việt Thống Hưng Thịnh, Công ty TNHH Băng tải Thành Công,
Công ty TNHH SX TM DV Kỹ thuật CLTECH, … mà các hãng đã thực hiện và ghi hình lại
- Nghiên cứu và xây dựng bài toán cho hệ thống băng chuyền
- Xây dựng lưu đồ thuật toán
- Thiết kế , xây dựng mô hình mô phỏng
- Xử lý số liệu , tính toán và viết báo cáo lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
1.6.2. Ý nghĩa thực tiễn
- Lựa chọn những công nghệ phù hợp áp dụng vào thực tế ở Việt Nam
- Góp phần hỗ trợ vào ngành công nghiệp sản xuất tại Việt nam
- Giúp ích cho quá trình vận chuyển và sản xuất và giúp ích cho việc quản lý ở nhà máy lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
CHƯƠNG 2. TÍNH TOÁN, LỰA CHỌN ĐỘNG CƠ
2.1. Tính toán lựa chọn băng tải.
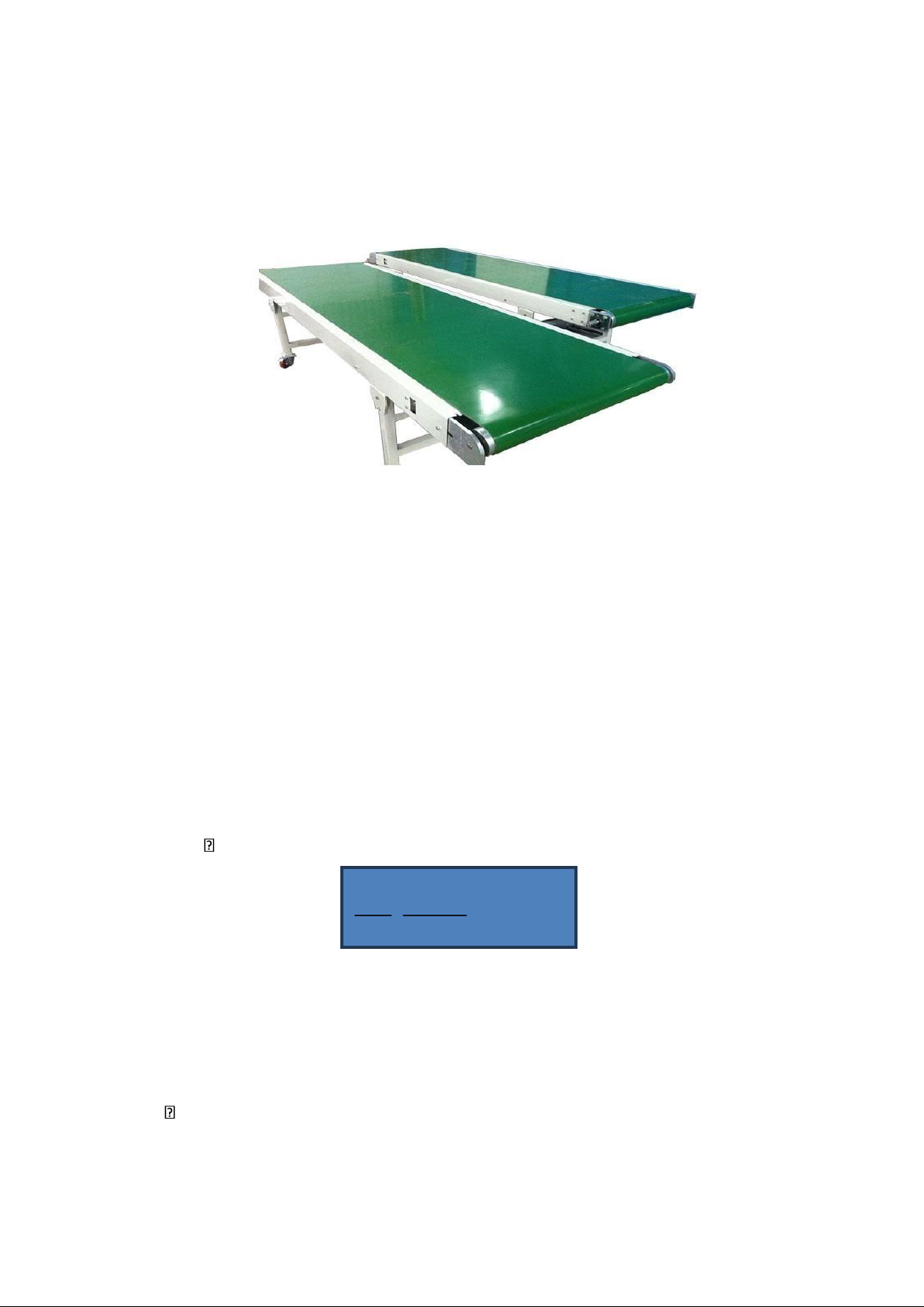
2.1.1. Bài toán trong thực tế Hình 2.1. Băng tải.
Thiết kế hệ thống truyền động điện điều khiển động cơ vận chuyển thùng hàng táo
khối lượng 40kg trên băng tải. Với các số liệu ban đầu như sau:
- Nguồn xoay chiều : 380 VAC - Sản lượng : 96 tấn/h
- Kích thước băng tải : dài 10m , rộng 0.5m - Roller : r = 0.0225m
- Khối lượng thùng táo : 40kg
- Kích thước thùng táo : 0.5x0.4x0.5m -
Khoảng cách giữa 2 thùng táo: 0.2m
2.1.1.1. Tính toán tốc độ và khối lượng cho băng tải
Số thùng táo tối đa trên băng tải: (2.1) l 10 = = 14 (thùng lt+r 0.5+0.2
l : chiều dài băng tải lt: chiều dài thùng táo r : khoảng cách
Để đạt được sản lượng 96 tấn/h 2400 thùng/h theo yêu cầu, ta cần tính toán tốc độ băng tải như sau:
• Chiều dài băng tải chứa được 2400 thùng táo: lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
l1 = (số thùng táo/ giờ) x (L thùng táo + KC 2 thùng) = 2400 x 0.7= 1680(m) (2.2)
• Vận tốc của băng chuyền theo yêu cầu: = 0.47 (2.3)
Tính tổng khối lượng tải mà băng tải phải chịu
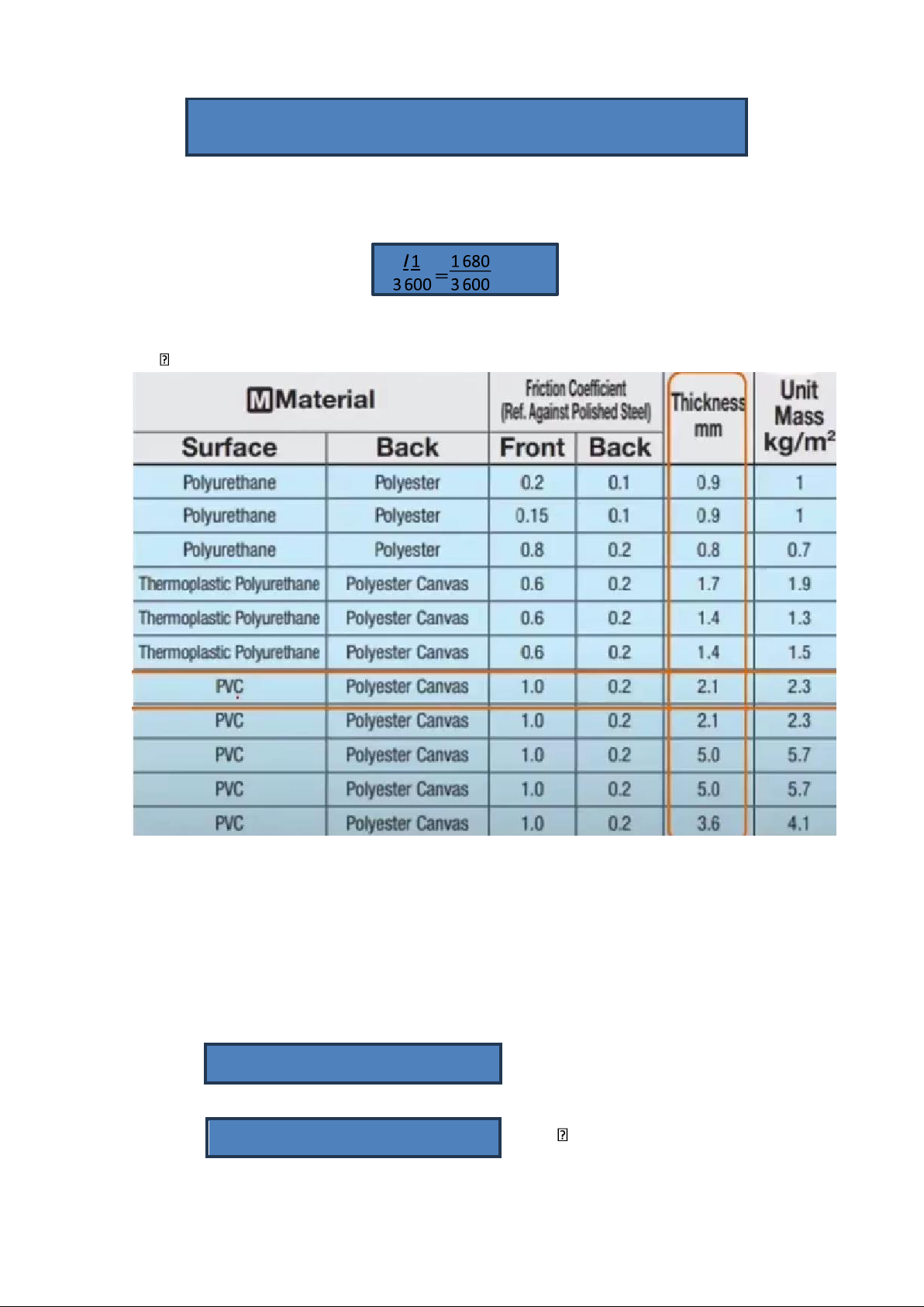
Bảng 2.1. Các tham số và vật liệu băng tải trên thị trường.
Tra bảng 2.1. ta chọn băng tải có tham số sau: - Chất liệu PVC - Độ dày: 0.0021m
- Tỉ trọng: 2.3kg/m2 Từ kích thước và tham số đã chọn: • Diện tích băng tải: (2.4)
Sbt = 2 x l x r = 2 x 10 x 0.5 = 10 m2 • Trọng lượng: Mbt = Sbt x Tỉ t r
ọng = 10 x 2.3 = 23 kg (2.5) Trọng
lượng trên 10m băng tải: lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển. Msp = 40 x 14 = 560 kg (2.6)
Tổng khối lượng của hệ thống:
(2.7)M∑ = Msp + Mbt = 560 + 23 = 583 kg
2.2. Sơ đồ tổng thể của hệ thống
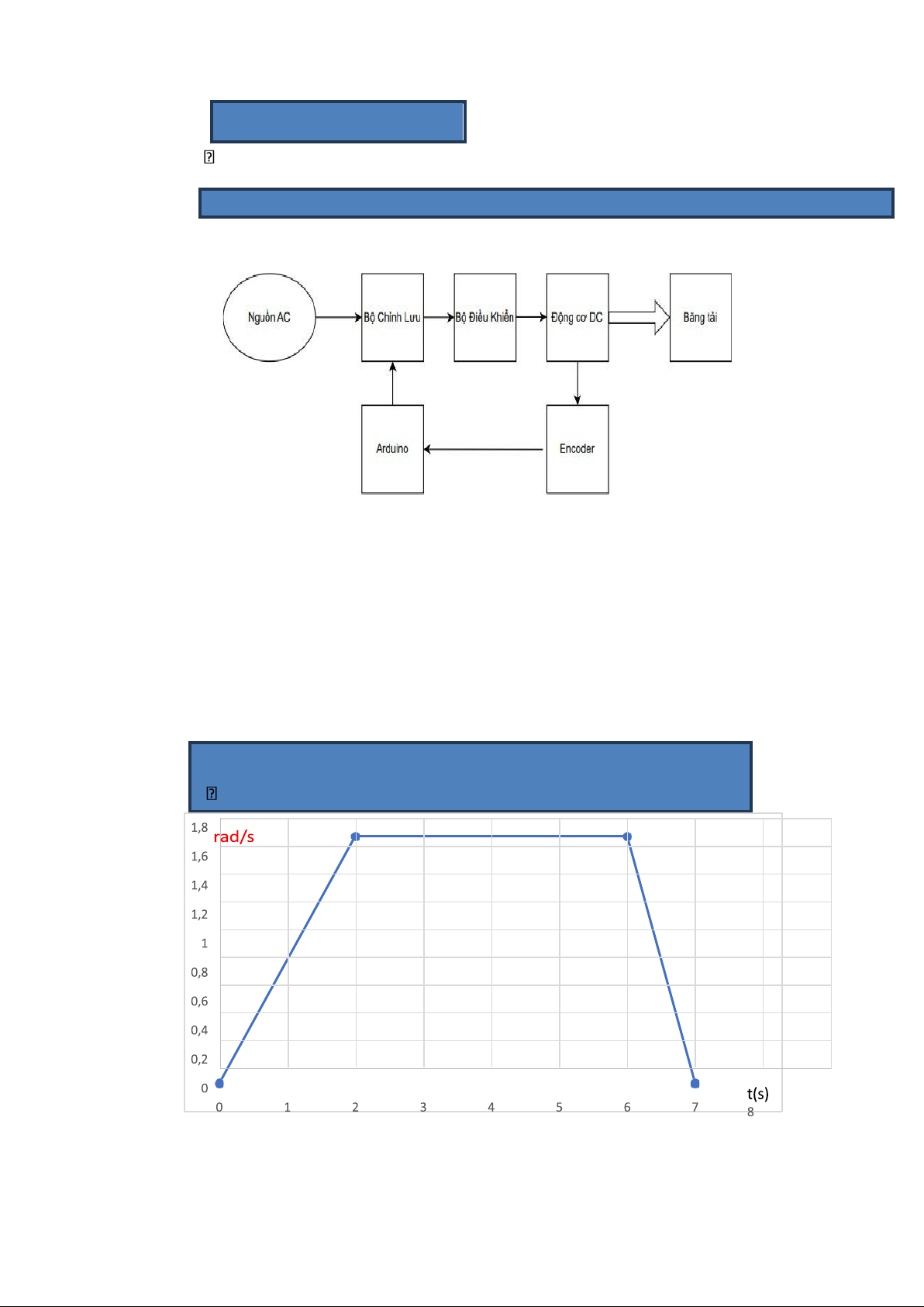
Hình 2.2. Sơ đồ tổng thể của hệ thống.
Dòng xoay chiều AC khi qua bộ chỉnh lưu sẽ được biến đổi thành dòng điện 1 chiều
ngoài ra còn có chức năng tăng giảm áp theo lập trình của arduino để điều khiển động
cơ kéo băng tải theo mong muốn
Khi động cơ DC hoạt động tốc quay trên trục rotor được đo bởi Encoder và phản
hồi về bộ điều khiển theo tín hiệu số analog hoặc digital để arduino phát xung đến bộ
chỉnh lưu sau đó bộ chỉnh lưu sẽ điều chỉnh điện áp cấp cho động cơ.
• Vì động cơ chuyển động quay, tải chuyển động thẳng nên: V = r x
𝜔𝑚 => 𝜔𝑚 = 𝑣/𝑟 = 0.47/0.0225= 20.88 rad/s(2.8) ( )
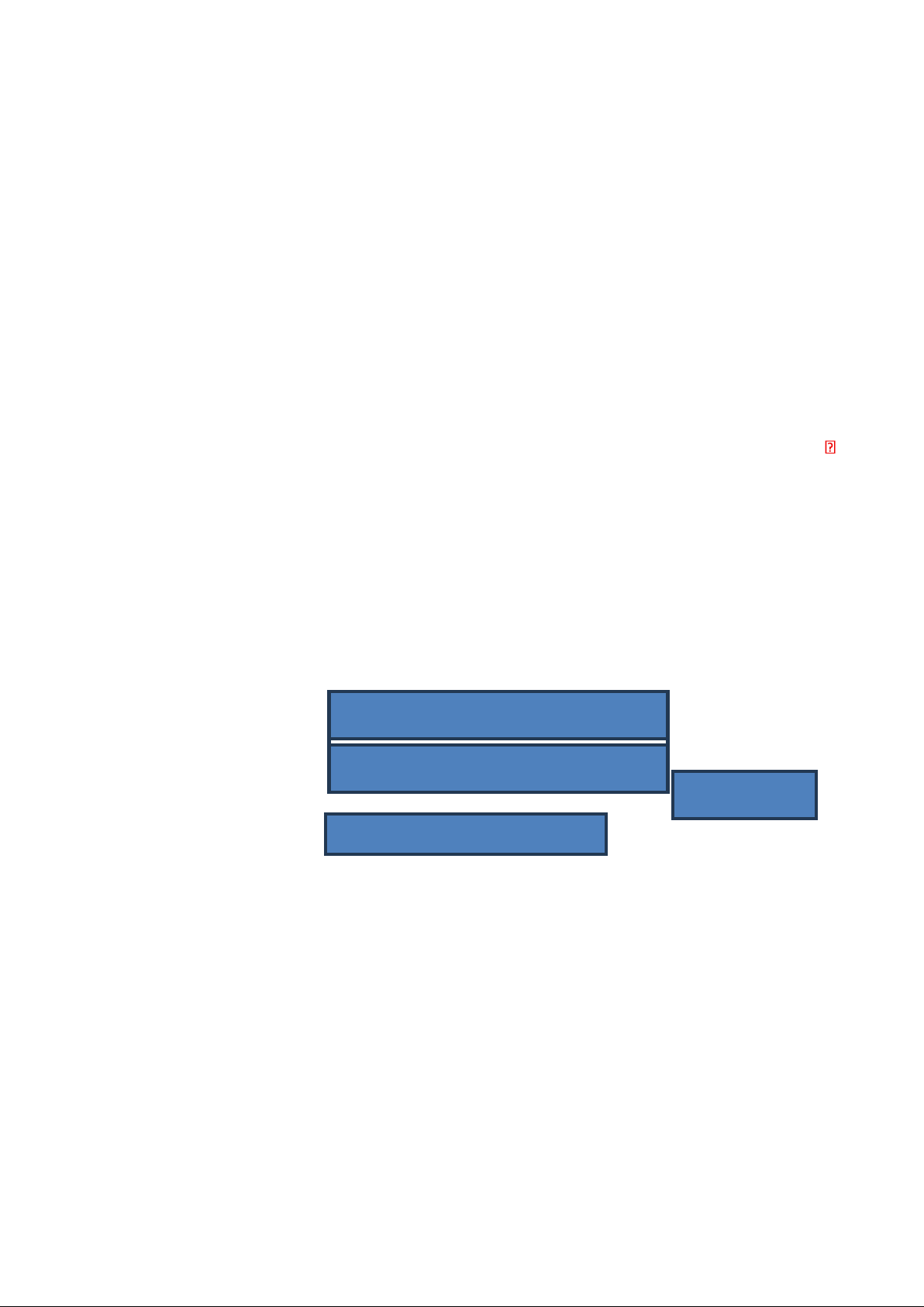
Hình 2.3. Đồ thị tốc độ mong muốn của động cơ.
Vậy quá trình truyền động có thể biểu diễn thành 3 giai đoạn:
• Giai đoạn 1: động cơ tăng tốc từ 𝜔𝑚 = 0 → 20.88 (rad/s) trong vòng 5s. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
• Giai đoạn 2: động cơ giữ nguyên tốc độ trong vòng 28788s.
• Giai đoạn 3: động cơ giảm tốc dần về 𝜔𝑚 = 20.88 → 0 (rad/s) trong vòng 7s.
2.3. Chọn phương án truyền động.
Ở đây, ta chọn phương án truyền động điều khiển cho động cơ một chiều kích từ
độc lập, có đảo chiều bằng phương pháp thay đổi điện áp phần ứng, trong đó:
• Bộ nguồn: cung cấp nguồn điện cho hệ thống.
• Bộ chỉnh lưu: biến đổi điện áp AC thành DC, tăng giảm điện áp một chiều
cấp vào động cơ DC, đồng thời để đảo chiều động cơ.
• Bộ Controller: so sánh giá trị đặt và giá trị cảm biến đo được, thông qua các
hàm tính toán các giá trị để điều khiển.
• Động cơ: biến đổi điện năng thành cơ năng để quay tải theo yêu cầu.
Encoder: đo tốc độ quay của động cơ để phản hồi về bộ controller.
2.4. Tính toán chọn công suất động cơ Dựa
vào các số liệu tính toán ở trên ta có:
• Tổng khối lượng: m= 583 kg
• Hệ số ma sát: µ = 0.2
• Hệ số an toàn: SOF = 1.5
• Tốc độ động cơ v = 0.47 m/s
Tổng lực tác động:(2.9) F = µ x m x g = 0.2 x 583 x 9.8 = 1143.8 N
Công suất :(2.10) P = F x v x SOF = 1143.8 x 0.47 x 1.5 = 1HP Mô men tổng : 𝜔 = 20.88 rad/s
M= F x r = 1143.8 x 0.0225 = 25.7 N lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển. Mô men xoắn : (2.9)
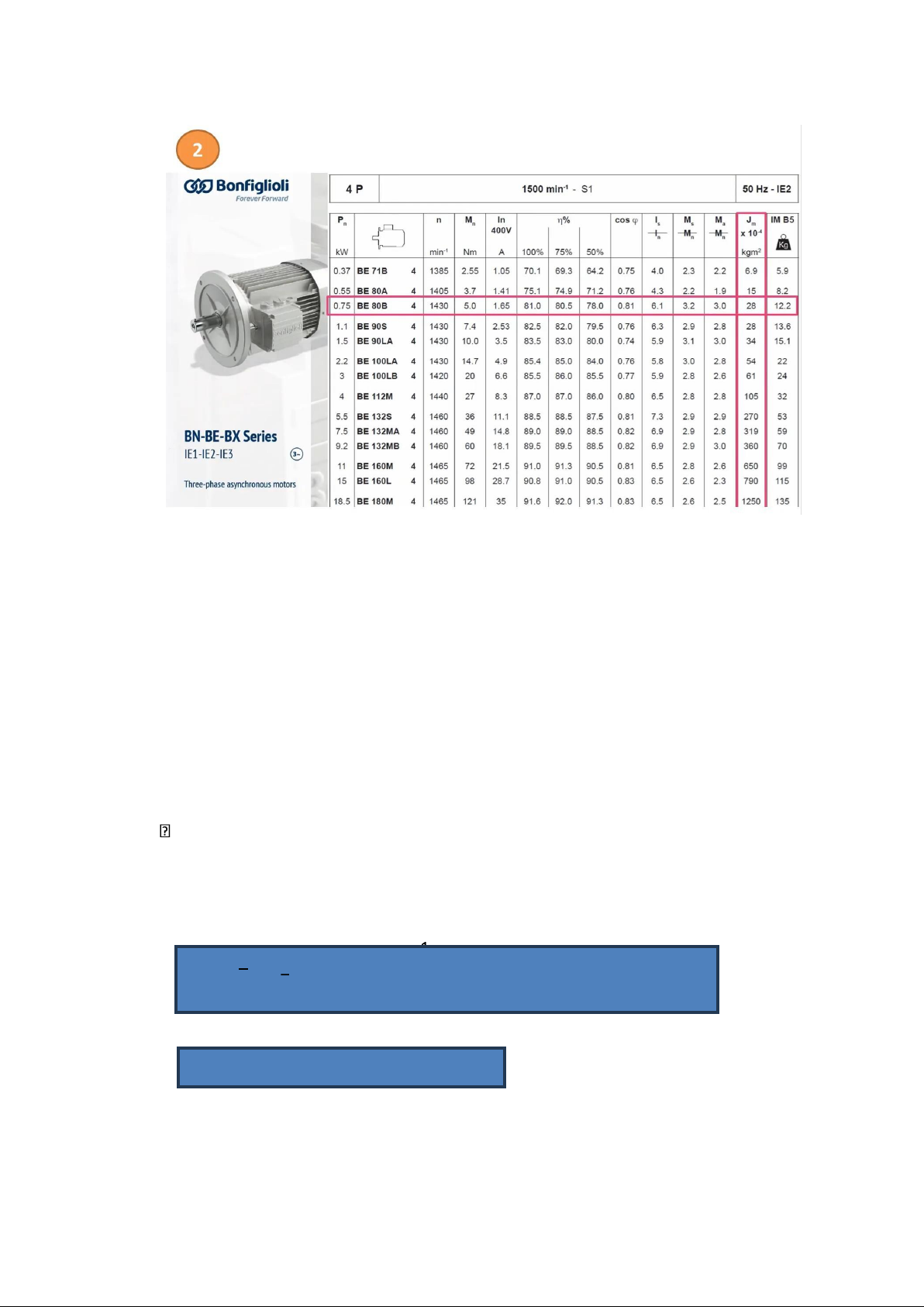
Hình 2.4. Tra cứu tham số động cơ không đồng bộ ba pha.
Dựa vào P vừa tính, tra bảng 2.4. chọn động cơ bonfiglioli BE 80B có các thông số sau:
- Điện áp định mức: Uđm = 380 VAC
- Công suất định mức: Pđm = 1 HP
- Dòng điện định mức: Iđm = 1.65 A
- Tốc độ định mức: nđm = 1430 vòng/phút
- Mô men quán tính: Jđc = 0.0028 Kgm2
- Rư = 6.7 Ω; Lư = 0.1944H
2.5. Tính mô men tổng Ta có: Mô men xoắn: M = 25.7 Nm Khối lượng roller: 15kg
Mô men quán tính trục roller: (2.12)
Jr oller= 12 x 2 Mroller x r2 x 2 = 2x 15 x 0.02252 x 2 = 0.0076 Kgm2 Mô men quán tính tải và băng tải: J (2.13)
t = M x r2 = 583 x 0.02252 = 0.295 Kgm2
Mô men quán tính động cơ: Jđc = 0.0028 Kgm2 Ta có:(2.14) lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển. v → ωtải = = 199.5 vòng/phút
Cần sử dụngr thêm hộp
số Chọn hộp số: Hệ số tỉ lệ: Momen xoắn M 25.7 (2.15) = = 0.806∗9550 =4.77
Momenđịnhmứcđộngcơ M
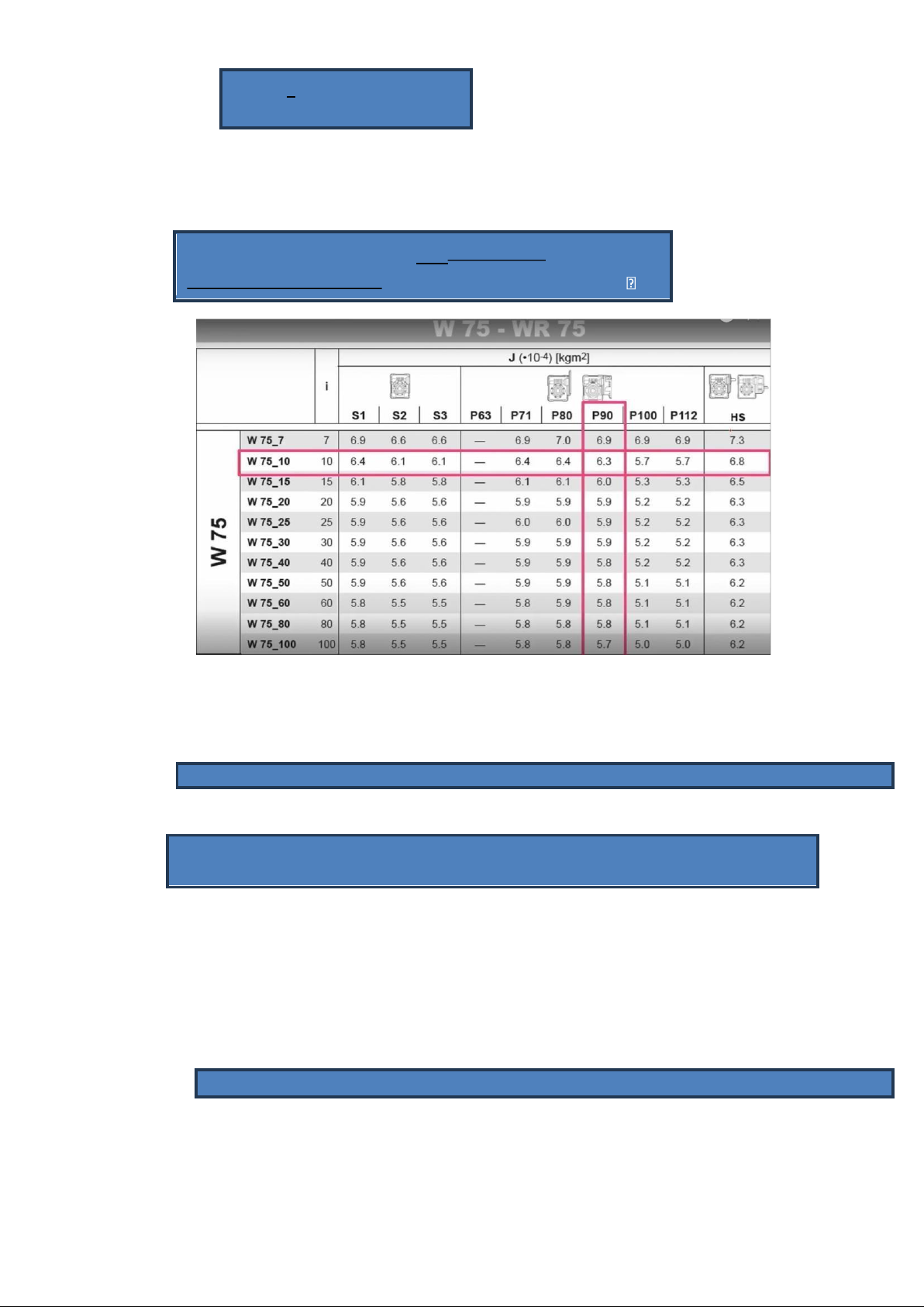
Hình 2.5. Bảng tra hộp số động cơ.
Dựa vào hệ số tỉ lệ 1:10 ta chọn hộp số W75_10 với các thông số như hình trên. Mô
men quán tính của hộp số: JG = 6.4 x 10-4 Kgm2 Tổng mô men quán tính:
JΣ = Jroller + Jt +Jđc + JG = 0.0076 + 0.295 + 0.0028 + 0.00063 = 0.30603 (2.16) Kgm2 Mô men khởi động:
Mkđ = JΣ x ωđm = 0.30603 x 74.87= 22.91 Nm (2.18) Mô men tổng:
Mmax=Momenxoắn+Mkđ + SOF =25.7 + 22.91 + 1.5 =50.11 Nm (2.19) lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
2.6. Kiểm nghiệm động cơ Mô
men động cơ cần sinh ra dωₘ M (2.20)
Mem=Mtqđ+JΣ x =
tải +J Σ x dωₘ dt i dt Lúc này: • Giai đoạn 1: (2.21) M M ₘ em=
itải +J Σ xdωdt = 25.710 + 0.30603 X 20.885−0−0 =3.84(Nm) • Giai đoạn 2: M M ₘ em=
itải +J Σ xdωdt = 25.710 + 0.30603 X (2.22) 20.88 • Giai đoạn 3: 28793−20.88−5 =2.57(Nm) (2.23) M Mem=
itải +J Σ xdωdtₘ = 25.710 + 0.30603 X 28800−28793 =1.65(Nm) T T T
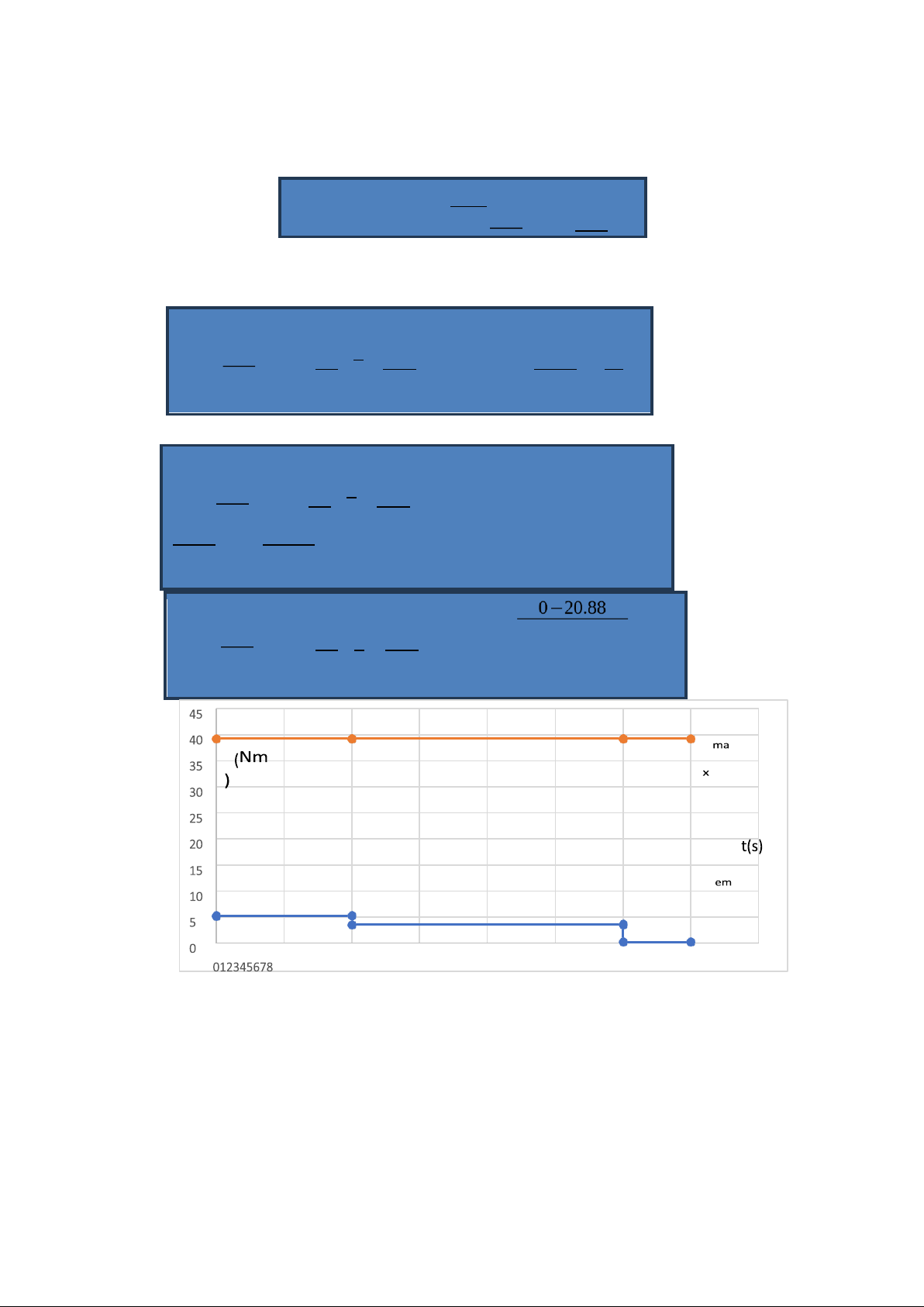
Hình 2.6. Đồ thị momen mong muốn và khả năng đáp ứng của động cơ.
Vậy ta thấy momen làm việc của động cơ thấp hơn momen cực đại của động cơ nên động
cơ được chọn đáp ứng được các yêu cầu của hệ thống. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển. lOMoAR cPSD| 58794847
Hệ thống truyền động điện sử dụng động cơ không đồng bộ ba pha điều khiển tốc độ băng chuyền vận chuyển.
TÀI LIỆU THAM KHẢO 1.
Các loại băng tải thông dụng nhất – Băng tải công nghiệp MHA
(http://bangtai24h.com/cac-loai-bang-tai-cong-nghiep/) 2.
Tìm hiểu về bộ chỉnh lưu – Thegioiic
(https://www.thegioiic.com/tin-tuc/tim-hieu-ve-bo-chinh-luu) 3.
Tài liệu Đồ án Tốt nghiệp băng chuyền phân loại sản phẩm
(https://doantotnghiep.vn/bang-chuyen-phan-loai-san-pham-bang-plc.html) 4.
Giáo trình Khí cụ điện – Tác giả: Phạm Văn Chới/Nhà Xuất Bản Giáo Dục Việt Nam. 5.
Giáo trình Mô hình hóa điều khiển trong điện tử công suất, Ứng dụng
Matlab & Simulink – Tác giả: Lê Minh Phương (chủ biên), Phan Quốc Dũng/Nhà
Xuất Bản Đại Học Quốc Gia TP Hồ Chí Minh. 6.
Giao tiếp Module điều khiển động cơ DC L298N với Arduino - arduinokit
https://arduinokit.vn/giao-tiep-module-dieu-khien-dong-co-dc-l298n-voi-arduino/
Tài liệu liên quan:
-

Tính toán và thiết kế truyền động cho cơ cấu nâng hạ cầu trục | Đồ án Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
139 70 -

Tính Toán & Thiết Kế Truyền Động Điện Cho Cầu Trục | Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
101 51 -

Chương 1 Môn Truyền động điện 1 | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
96 48 -

Trình bày các chỉ tiêu và các phương pháp điều chỉnh tốc độ trong truyền động điện | Đồ án môn Truyền động điện trường Đại học sư phạm kỹ thuật TP Hồ Chí Minh
389 195