Tính toán và thiết kế truyền động cho cơ cấu nâng hạ cầu trục | Đồ án Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Động cơ không đồng bộ 3 pha là máy điện xoay chiều , làm việc theo nguyên lý cảm ứng điện từ, có tốc độ của rotor khác với tốc độ từ trường trong máy. Tài liệu được sưu tầm gồm 52 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Truyền động điện 1 5 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:



Preview text:
lOMoAR cPSD| 58794847 lOMoAR cPSD| 58794847 MỤC LỤC
.....................................................................................................................................................................1 LỜI MỞ
ĐẦU.............................................................................................................................................4
PHẦN I: TÍNH TOÁN VÀ THẾT KẾ CƠ CẤU NÂNG HẠ CẦU TRỤC DÙNG ĐCĐ KĐB XOAY
CHIỀU BA PHA ROTOR DÂY QUẤN...................................................................................................8
CHƯƠNG I: ĐĂC Ṭ ÍNH CƠ CỦA ĐÔNG CƠ XOAY CHỊ ỀU KHÔNG ĐỒNG BÔ BA PHẠ .............................8
I) ĐÔNG CƠ KHÔNG Đ̣
ỒNG BÔ......................................................................................................................................̣ 8
1) Khái niệm.................................................................................................................... ................................................8
2) Cấu tạo..................................................................................................................... ...................................................8
3) Ưu điểm..................................................................................................................... .................................................9
4) Nhược điểm............................................................................................................................. ....................................9
II) PHƯƠNG TRÌNH ĐĂC Ṭ
ÍNH TỐC ĐÔ......................................................................................................................̣ 9
III) PHƯƠNG TRÌNH ĐĂC Ṭ
ÍNH CƠ............................................................................................................................11
IV) ẢNH HƯỞNG CỦA CÁC THAM SỐ ĐẾN DẠNG ĐĂC Ṭ ÍNH CƠ.......................................................................16
1.Ảnh hưởng của điên ̣ áp :.............................................................................................................................................16
2. Ảnh hưởng của điên trở phụ hay điệ n kḥ
áng phụ nối tiếp trên mạch Stator :.............................................................17
3. Ảnh hưởng của điên trở phụ ṇ
ối tiếp vào dây quấn Rotor :........................................................................................18
4. Anh hưởng của số đôi cực từ P :.......................................................................................... ......................................20
V) CÁC DẠNG KHỞI ĐỘNG CỦA ĐỘNG CƠ..............................................................................................................22
1)Khởi đông độ ng cơ không đ ̣ ồng bô....................................................................................................................... ......̣ 22
2)Khởi đông trực tiếp ̣ ............................................................................................................................. .......................22
3)Khởi đông bằng ṃ áy biến áp tự ngẫu........................................................................................................ .................23
4)Khởi đông bằng điện trở phụ ṃ ạch rotor:................................................................................................................... 24
5)Điều chỉnh tốc đô động cơ không đ ̣ ồng bô.................................................................................................................̣ 24
6)Điều chỉnh tốc đô bằng c ̣ách thay đổi điên trở phụ ṿ ào mạch rotor :..........................................................................24
7)Điều chỉnh tốc đô bằng c ̣ách thêm điên trở phụ ṿ ào mạch stator :..............................................................................25
8)Điều chỉnh tốc đô bằng c ̣ ách thay đổi điên ̣ áp nguồn cung cấp :.................................................................................27
VI) MỞ MÁY VÀ TÍNH ĐIÊN TṚ Ở MỞ MÁY..............................................................................................................27 VII)
HÃM MÁY............................................................................................................................. ....................................30
1) Hãm tái sinh............................................................................................................................. .................................30
2) Hãm ngược.................................................................................................................. .............................................31 3) Hãm đông năng ̣
............................................................................................................................. ............................34 4. Hãm đông năng tự ḳ
ích từ...................................................................................................................... ...................34
PHẦN II: TÍNH TOÁN NÂNG CẦN TRỤC BẰNG ĐÔNG CƠ KHÔNG Đ̣ ỒNG BÔ BA PHẠ ......37
CHƯƠNG II: YÊU CẦU MỞ MÁY QUA BA CẤP ĐIÊN TṚ Ở PHỤ.....................................................................................37
I. SƠ LƯỢC VỀ ĐỘNG CƠ AC KHÔNG ĐỒNG BỘ BA PHA ROTOR DÂY QUẤN:..............................................37
1)Dòng điên đ ̣ ịnh mức của stator......................................................................................................... ..........................38
2)Dòng điên rotor ở chế độ đ ̣ ịnh mức.................................................................................................................. ..........39
3)Tính toán phần trở kháng ngắn mạch..........................................................................................................................39
4)Tính toán dòng điên mở ṃ áy........................................................................................................................... ...........40
5)Bôi ṣố dòng điên mở ṃ áy KI............................................................................................................................. .........40
6)Tốc đô trượt đ ̣ ịnh mức Sđm................................................................................................................. .......................40
7)Tốc đô đ ̣ ịnh mức của đông cơ ṇ đm............................................................................................................................. ..40
8)Khả năng quá tải của đông cợ ............................................................................................................................. ........40 lOMoAR cPSD| 58794847
9)Moment định mức........................................................................................................... ...........................................41
II)TÍNH ĐIÊN TṚ Ở PHỤ MỞ MÁY, ĐÔNG CƠ Ṃ Ở MÁY QUA 3 CẤP ĐIÊN TṚ Ở PHỤ BẰNG PHƯƠNG
PHÁP ĐỒ THỊ.............................................................................................................................................................................41
CHƯƠNG III: YÊU CẦU NÂNG TẢI...................................................................................................43
I)TÍNH TOÁN ĐIÊN TṚ Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ NÂNG TẢI BẰNG 1/2 TỐC ĐỘ ̣
ĐỊNH MỨC..................................................................................................................................................43
II)TÍNH TOÁN ĐIÊN TṚ Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ NÂNG TẢI BẰNG 1/4 TỐC ĐỘ ̣
ĐỊNH MỨC............................................................................................................................. ......................................................44
CHƯƠNG VI: YÊU CẦU HẠ TẢI..............................................................................................................44
I)TÍNH TOÁN ĐIÊN TṚ Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ Ḥ Ạ TẢI BẰNG ½ TỐC ĐÔ Đ̣ ỊNH
MỨC:............................................................................................................................. ................................................................45
II) TÍNH TOÁN ĐIÊN TṚ
Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ Ḥ Ạ TẢI BẰNG ¼ TỐC ĐÔ ̣
ĐỊNH MỨC............................................................................................................................. ......................................................46
III) TÍNH TOÁN ĐIÊN TṚ
Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ Ḥ Ạ TẢI BẰNG TỐC ĐÔ Đ̣ ỊNH
MỨC............................................................................................................................. .................................................................47
IV)TÍNH TOÁN ĐIÊN TṚ Ở PHỤ ĐÓNG VÀO VẠCH ROTOR ĐỂ ĐÔNG CƠ ḤẠ TẢI BẰNG 2 LẦN TỐC ĐÔ ̣
ĐỊNH MỨC............................................................................................................................. ......................................................48
KẾT LUẬN...............................................................................................................................................51 lOMoAR cPSD| 58794847 LỜI NÓI ĐẦU LỜI CẢM ƠN
Trong suốt thời gian học tập và rèn luyện tại trường Đại học Sư Phạm Kỹ Thuật,
em đã được sự dạy bảo tận tình của tập thể Thầy Cô của trường. Những kiến thức và sự
thành đạt mà em đạt được hôm nay chính là nhờ sự dạy bảo của các Thầy Cô. Em
xin gởi lời cảm ơn sâu sắc đến quý Thầy Cô, những người đã tận tâm truyền đạt những
tri thức khoa học cơ bản cũng như những kiến thức chuyên nghành cho em. Đặc biệt
em xin cảm ơn quý Thầy Cô khoa Điện - Điện Tử, những người đã bỏ bao tâm huyết để
truyền đạt những tri thức, những kỹ năng, những kinh nghiệm quý báu trong chuyên
môn để chúng em vững tin khi bước vào cuộc sống.
Chúng em xin gửi lời cảm ơn riêng đến Cô Nguyễn Thị Mi Sa giảng viên trường
Đại học Sư Phạm Kỹ Thuật TP Hồ Chí Minh, đã tận tình hướng dẫn em thực hiện đồ án
môn học Truyền Động Điện. Chúng em xin gửi đến Cô lời chúc sức khỏe và ngày càng
thành công trên bục giảng.
Cuối cùng, chúng tôi xin cảm ơn tất cả bạn bè thân mến đã động viên, góp ý để
mình hoàn thành tốt đồ án này.
LÝ DO CHỌN ĐỀ TÀI
Trong bối cảnh Việt Nam đã là thành viên của tổ chức thương mại thế giới
(WTO), xu thế hội nhập ngày càng sâu rộng dẫn đến sự giao lưu hợp tác trên nhiều lĩnh
vực, trong đó có lĩnh vực khoa học kỹ thuật. Các dây chuyền sản xuất mới có kỹ thuật
hiện đại đã dần thay thế những dây chuyền lạc hậu, lỗi thời.
Trong một dây chuyền sản xuất hiện đại thì khâu truyền động giữ một vai trò
quan trọng. Tùy theo yêu cầu và mục đích của dây chuyền mà truyền động thực hiện
các công đoạn khác nhau trong một quy trình sản xuất. Do đó nó ảnh hưởng tới việc
nâng cao chất lượng sản phẩm và năng suất sản xuất.
Để hiểu rõ hơn về truyền động điện và có kiến thức nhất định về vấn đề
này.Chúng em đã được hướng dẫn làm đồ án : “Đặc Tính Cơ Của Động Cơ Không
Đồng Bộ Ba Pha và Ứng Dụng Tính Toán Cụ Thể”. Đồ án được chia làm 4 chương: lOMoAR cPSD| 58794847
Chương 1: Đặc tính cơ của động cơ điện xoay chiều không đồng bộ 3 pha rotor
dây quấn. Nội dung chương trình này giới thiệu đặc tính cơ, đặc tính tốc độ, các thông
số ảnh hưởng tới dạng đặc tính cơ, tính toán điện trở phụ mở máy và vấn đề hãm máy
của động cơ điện xoay chiều không đồng bộ 3 pha rotor dây quấn.
Chương 2: Tính toán và thiết kế cơ cấu dùng động cơ xoay chiều không đồng bộ
3 pha rotor dây quấn. Nội dung của chương trình này là tính toán điện trở mở máy qua
3 cấp điện trở, và thiết kế sơ đồ nguyên lý cho cơ cấu bằng cách dùng động cơ điện
xoay chiều không đồng bộ 3 pha rotor dây quấn. Kho tàng kiến thức là vô hạn, dù đã
được trang bị một lượng kiến thức chưa sâu, kinh nghiêm thực tế chưa nhiều nên trong
quá trình làm đồ án không tránh khỏi những sai lầm thiếu sót. Rất mong sự đóng góp
của quý thầy cô và bạn bè.
Chương 3: Yêu cầu nâng tải.
Chương 4: Yêu cầu hạ tải.
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
.................................................................................................................................. lOMoAR cPSD| 58794847
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
..................................................................................................................................
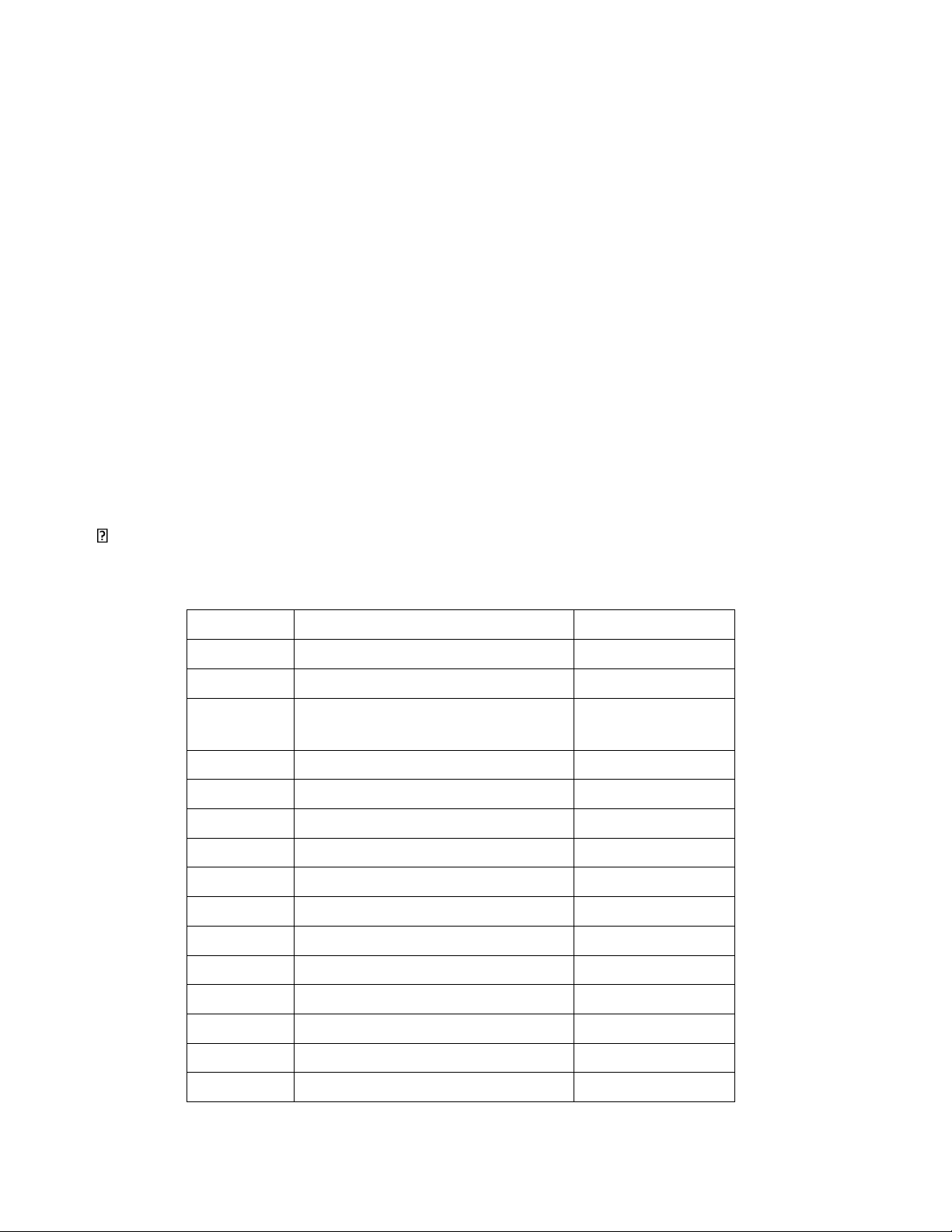
NHIỆM VỤ CỦA ĐỀ TÀI
Tính toán và thiết kế truyền động điện cho một cơ cấu nâng hạ cầu trục dùng động cơ AC
không đồng bộ 3 pha có các số liệu sau đây:
P đm (KW) công suất đông cơ ̣ 51 U1đm (V) điên ̣ áp định mức 400 2p số cực từ 10 N1
số vòng mỗi pha dây quấn 61 stator N2
số vòng mỗi pha dây quấn rotor 31 Kdq1 hệ số dây quấn stator 0,951 Kdq2 hệ số dây quấn rotor 0,951 R1 (Ω)
điện trở dây quấn stator 0,21 R2 (Ω)
điện trở dây quấn rotor 0,02 X1 (Ω)
điện kháng dây quấn stator 0,31 X2 (Ω)
điện kháng dây quấn rotor 0.051 m1 số pha dây quấn stator 3 m2 số pha dây quấn rotor 3 I0 dòng điện không tải 31 η hiệu suất 0,81 cosφ hệ số công suất 0,811
Dây quấn Rotor và Stator được đấu Y/Y
Sức từ động trên stator > sức từ động trên rotor 20%
Động cơ làm việc ở tần số 50Hz lOMoAR cPSD| 58794847
Yêu cầu tính toán và thiết kế như sau :
1. Động cơ mở máy qua 3 cấp điện trở phụ. Tính điện trở phụ mở máy, biết rằng động
cơ kéo tải định mức.
2. Tính toán điện trở phụ cần thiết đóng vào mạch rotor để nâng tải lên với các tốc độ
lần lượt là: 1/2nđm và 1/4 nđm..
3. Tính toán các điện trở phụ cần thiết đóng vào mạch rotor để hạ tải với các tốc độ lần
lượt là: 1/4nđm , 1/2nđm, nđm, 2nđm. Biết rằng moment cản khi hạ tải là 0,8 lần Mđm.
PHẦN I: TÍNH TOÁN VÀ THẾT KẾ CƠ CẤU NÂNG HẠ CẦU TRỤC DÙNG ĐCĐ
KĐB XOAY CHIỀU BA PHA ROTOR DÂY QUẤN
CHƯƠNG I: ĐẶC TÍNH CƠ CỦA ĐỘNG CƠ XOAY CHIỀU KHÔNG ĐỒNG BỘ BA PHA
I)ĐỘNG CƠ KHÔNG ĐỒNG BỘ.
1) Khái niệm
-Động cơ không đồng bộ 3 pha là máy điện xoay chiều , làm việc theo nguyên lý
cảm ứng điện từ, có tốc độ của rotor khác với tốc độ từ trường trong máy.
-Động cơ không đồng bộ 3 pha được dung nhiều trong sản xuất và sinh hoạt vì chế
tạo đơn giản ,giá rẻ ,độ tin cậy cao , vận hành đơn giản , hiệu suất cao , và gần như không
cần bảo trì. Dải công suất rất rộng từ vài Watt đến 10000hp, Các động cơ từ 5hp trở lên
hầu hết là 3 pha còn động cơ nhỏ hơn 1hp thường là 1 pha.
2) Cấu tạo
-Giống như các loại máy điện quay khác, động cơ không đồng bộ 3 pha gồm có các bộ phận chính sau: -
Phần tỉnh hay còn gọi la stator. - Phần quay hay còn gọi la rotor. a) Stator
-Trên stator có vỏ, lõi thép và dây quấn.
-Võ máy có tác dụng cố định lõi thép và dây quấn. lOMoAR cPSD| 58794847 -
Lõi sắt là phần dẫn từ được làm bằng những lá thép kỹ thuật điện dày 0,5mm ghép lại.
-Dây quấn stator được đặt vào các rãnh của lõi sắt và được cách điện tốt với lõi sắt b) Rotor -
Phần này có 2 bộ phận chính là lõi sắt và dây quấn.
-Nói chung người ta sử dụng các lá thép kỹ thuật điện như ở stator.
-Dây quấn rotor có 2 loại chính là rotor kiểu dây quấn và rotor kiểu lồng sóc. c) Khe hở
-Vì rotor là 1 khối tròn nên khe hở đều.Khe hở trong mày điện không đồng bộ rất
nhò (từ 0,2 đến 1mm trong máy điện nhỏ và vừa) để hạn chế dòng điện từ hóa lấy từ lưới
vào và như vậy mới có thể làm cho hệ số công suất của máy cao hơn.
3) Ưu điểm
-Ưu điểm nổi bât của loại đô ng cơ này là: C̣
ấu tạo đơn giản, đăc biêt là
đông cơ ̣ Rotor lồng sóc. So với đông cơ môt chiều, Đông cơ không đồng bô giá thành
hạ,̣ vận hành tin cây, chắc chắn. Ngoài ra đông cơ không đồng bô dùng tṛ ực tiếp
lưới điện xoay ̣ chiều ba pha nên không cần trang bị thêm các thiết bị biến đổi kèm theo.
4) Nhược điểm
-Nhược điểm của đông cơ không đồng bô là đị
ều chỉnh tốc đô và khống cḥ
ế các quá trình khó khăn; riêng với các đông cơ Rotor lồng sóc có các chỉ tiêu khởi động kém hơn.
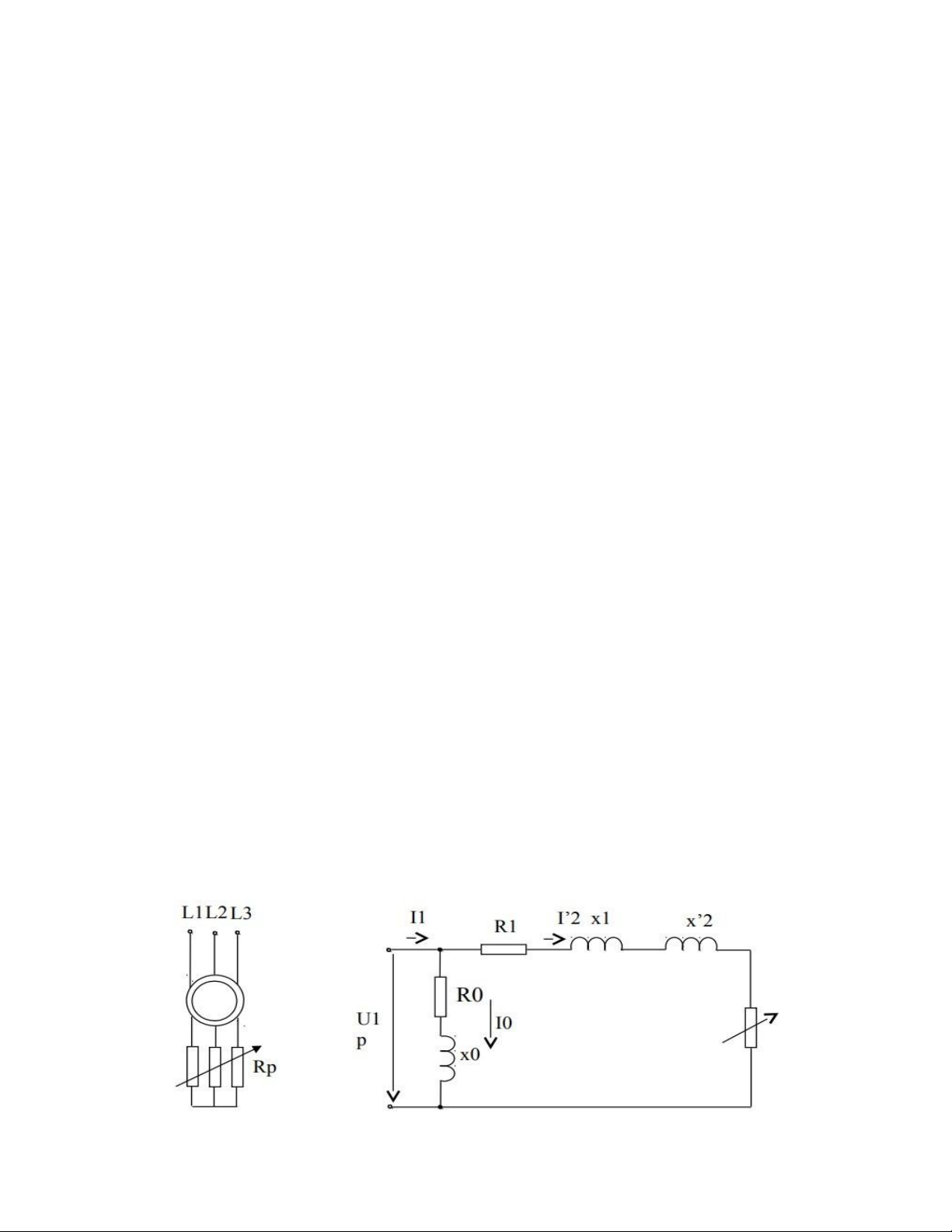
II) PHƯƠNG TRÌNH ĐẶC TÍNH TỐC ĐỘ lOMoAR cPSD| 58794847
Hình 2.1 Sơ đồ nguyên lý của dộng cơ ba pha và sơ đồ tương đương thay thế một pha của
động cơ không đồng bộ - Trong đó:
• R0, X0, I0 lần lượt là điên trở, điệ n kḥ áng và dòng điên ṃ ạch từ hoá.
• R1, X1, I1 lần lượt là điên trở, điệ n kḥ áng và dòng điên ṃ ạch Stator.
• R’2,X’2 ,I’2: điên trở, điệ n kḥ áng và dòng điên Rotor đã qui đổi về Stator.̣
: điên trở phụ thêm ṿào mạch rotor Rp
• U1đm:Điên ̣ áp định mức đăt ṿ ào ba pha.
• U1p là điên ̣ áp pha đăt ṿ ào Stator. s n =
ω0−ω = 0−n : là đô trượt (Hệ ṣ ố
trượt của đông cơ)̣ ω0 n0
• ω0:tốc đô g ̣ óc của từ trường quay (rad/s)
• ω: tốc đô g ̣
óc của từ trường (rad/s)
60 f : Tốc đô của từ trựờng quay (vòng /phút) n0= p
• f : tần số của điên ̣ áp nguồn đăt ṿ ào Stator (Hz)
• p : số đôi cực từ của đông cợ
• n : tốc đô quay của Rotor (vòng /pḥ út)
I'2= Kqđ.I2 = Ki I2 : Dòng điên qui đổị K = 1
qd KqdE=1⇒ Kqd
K qdE : Hê ṣ ố qui đổi dòng điên ̣ U1dm N
K : Hê ṣ ố qui đổi sức từ đông ̣ K = qdE E2dm N2⋅ K dq2
• N1,N2 : số vòng mỗi pha dây quấn stator ,rotor
E2đm: sức từ đông đ ̣ ịnh mức xuất hiên trên 2 vòng trượt rotor khi:̣ - Rotor hở mạch lOMoAR cPSD| 58794847 - Đăt điệ
n ̣ áp vào stator là Uđm - Phương trình đăc ṭ ính tốc đô : ̣ U ❑ ' 1 p I 2 X N Trong đó : • X : điên kḥ áng ngắn mạch N =X1+X'2 • R'=R'
: điên trở qui đổị 2+R' p
Khi mở máy tốc đô n = 0 nên hệ ṣ ố trượt s=1 U ❑ ' ❑ 1 p → I 2mm 2 ' ❑ U1 p U1 p
→ dòng điên khi mở ṃ áy : I 2mm = Zmm =√¿¿¿ với : Z 2
mm=√(R1+R' )+ XN
- Thông thường : I ' ❑ ❑
2mm =(4 ÷7) I¿ nm ¿
III) PHƯƠNG TRÌNH ĐẶC TÍNH CƠ.
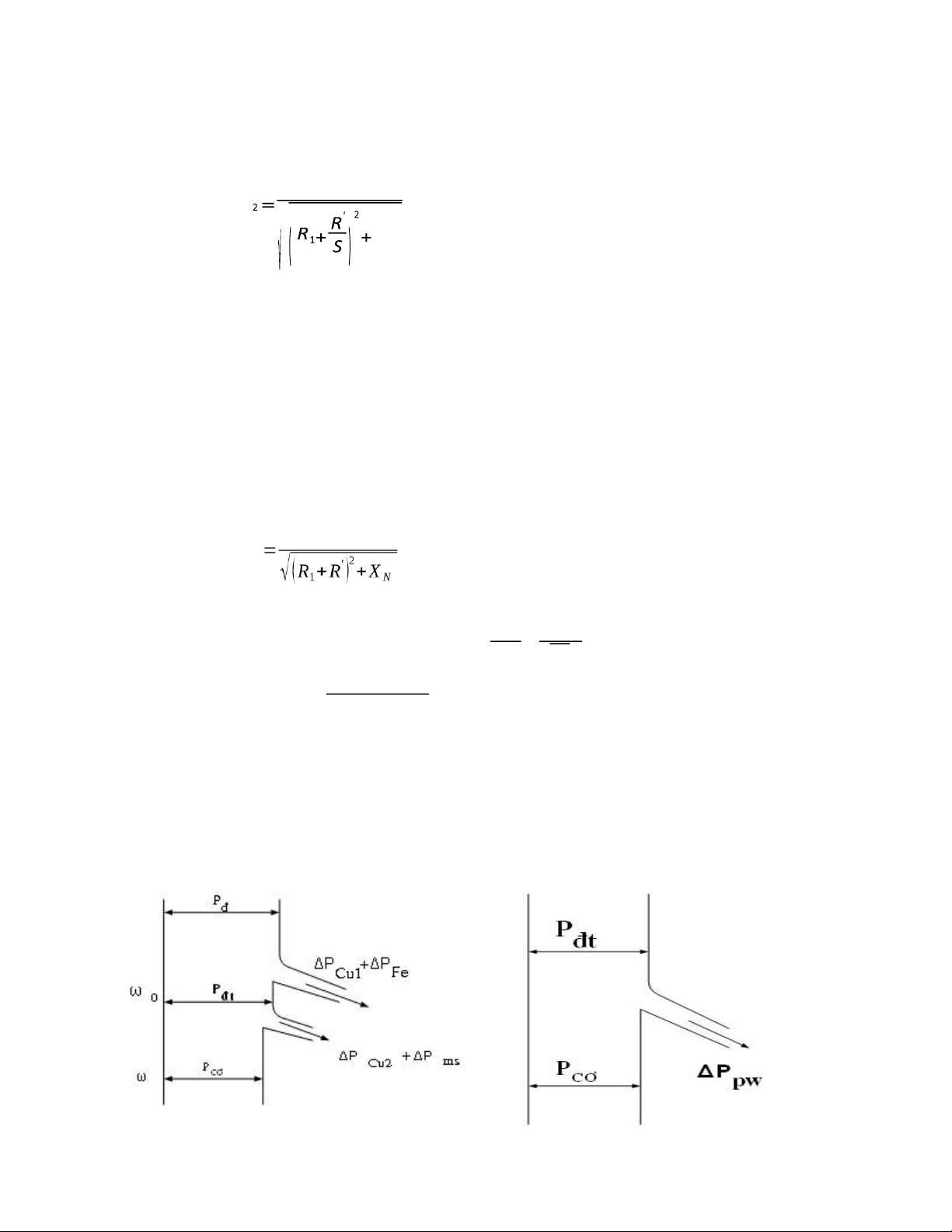
Giản đồ công suất Giản đồ moment lOMoAR cPSD| 58794847 Hình 3.1 Hình 3.2
Để tìm phương trình đăc ṭ
ính cơ của đông cơ ta dựa ṿ ào điều kiên cân bằng công suấṭ đông cơ.̣
Công suất điên từ chuyển từ Stator sang Rotoṛ P dt =M dt ×ω1 Trong đó :
• Mđt :moment điên từ độ ng cợ
• Pdt =Pc ơ +Δ Pphụ +Δ Pcu 2❑
Nếu tổn hao phụ không đáng kể ΔPphuï=0 thì Mđt = Mcơ =M
⇒ Pdt =Pc ơ +Δ Pcu2 ❑ ⇔ M 2
dm .ω0=M c ơ .ω+3 P' . I'2 ⇔ M (ω 2
0−ω)=3 P' . I'2
Mà: S=ω0−ω ⇒ M= 3R' . I'2 ω0S
Thay I '2vào ta được : 3 R' .U 21 p M= n0S R' 2 2 (2) 9,55 [(R1+ S ) + X ] nm
(2) là phương trình đăc ṭính cơ xoay chiều không đồng bô ba pha.̣
- Đường biểu diễn của phương trình đăc ṭ
ính cơ có dạng đường cong nên toạ đô điểm cực ̣
dM trị được xác
định bằng cách giải phương trình ds =0 ta được : R' - Đô trượt ṭ ới hạn : S (3) max
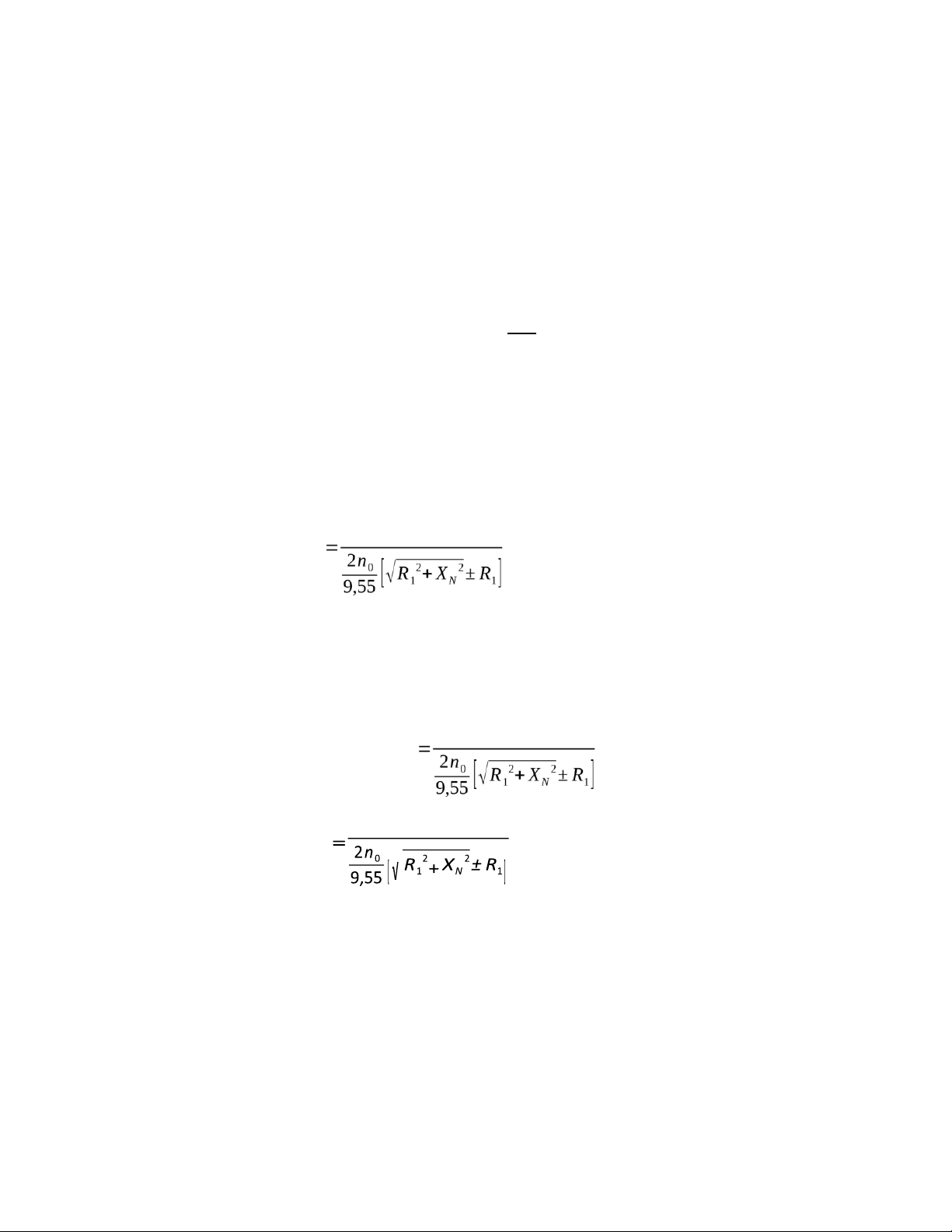
Thay phương trình (3) vào phương trình đăc ṭính cơ ta được moment tới hạn : 3U 2 1p M lOMoAR cPSD| 58794847 (4)
Trong đó : (+) : ứng với trạng thái đông cợ
(-) : ứng với trạng thái máy phát M t h
- Hê ṣ ố quá tải về moment : λ = M M nm
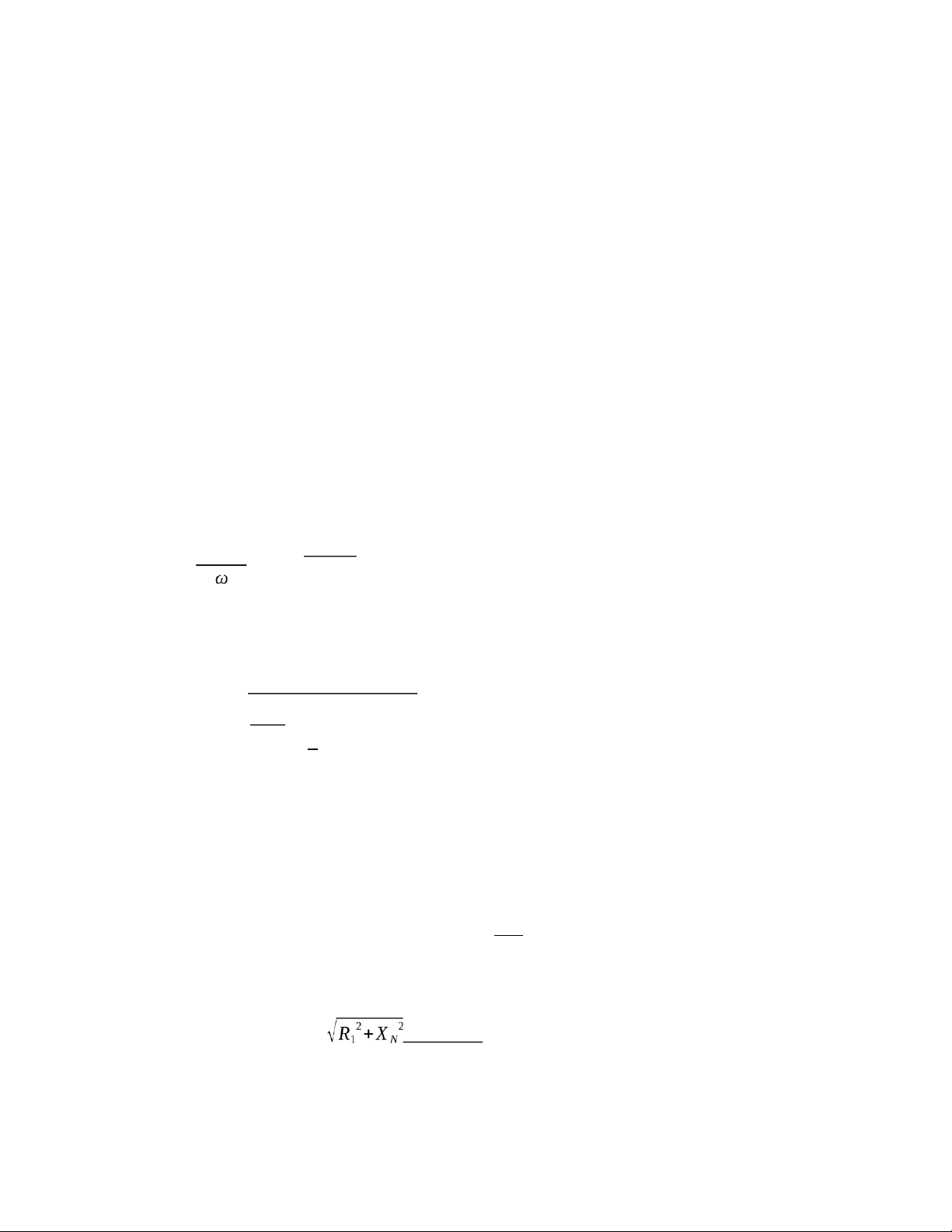
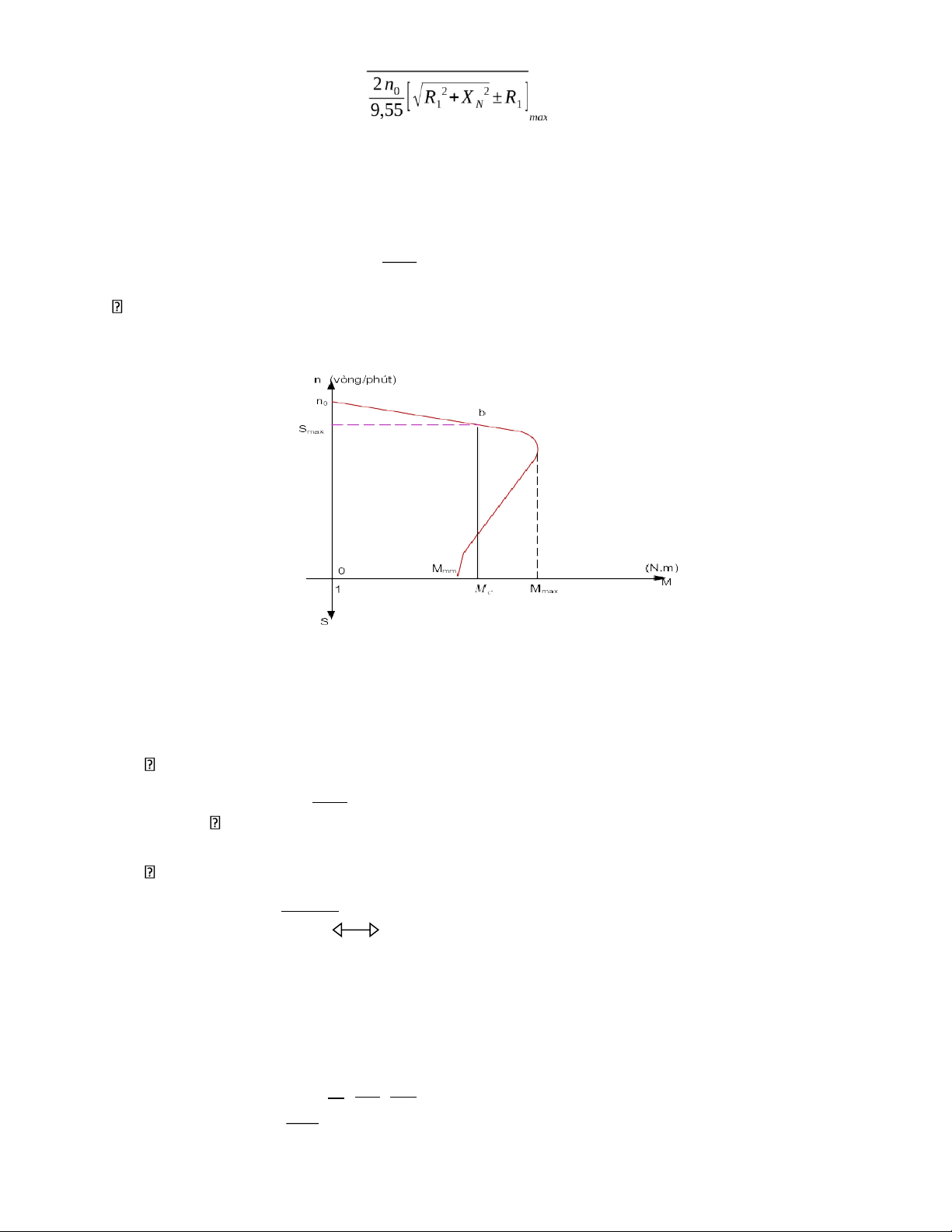
Cách vẽ đăc ṭ ính cơ khi không biết R1 , X1 ,R2 , X2 chỉ biết các tham số định mức của
đông cơ trên nhãn máy và cần thực hiên c ̣ ác bước sau:
Hình 3.3 Đặc tính cơ của động cơ không đồng bộ 3 pha
Bưóc 1: Xác định toạ đô 3 điểm đặt biệt.̣
Điểm đồng bô của từ trự ờng : A(M=0,n=n0) 60 f với n0= p
Điểm tới hạn : B(Mmax , Smax ) 60 f60 f
n0= p n0= p Măt kḥ ác:
Mmax 1 Sdm Smax lOMoAR cPSD| 58794847 λ )
M=Mñm =2 (Smax +Sdm
Sdm=n00−ndm
¿S2max−2λMSdmSmax+S2dm=0¿¿ n Sñm Smax
+ =2λalignl¿M¿ Smax Sñm ¿
Giải phương trình ta được: S
Điểm mở máy : C(M=Mmm, n=0)
Thay S = 1 vào phương trình (2) ta được : 3R' .U 2 1 p M mm= 9,55 1 ) N
Bước 2: Lấy nhiều giá trị S trong khoảng 0→1 thay vào biểu thức 2M max M mm= Smax Smax 1
Ta sẽ được moment tương ứng. S 0 S1 S2 . . . . . . . . 1
M M0 M1 M2 . . . . . . . . Mmm Bước 3: Từ toạ đô (S , M) ṿ ới 3 điểm đăc biệ t ṇ
ối lại ta sẽ được đường đăc ṭ ính cơ của đông cơ.̣
Các dạng khác của đặc tính cơ
Lâp tỉ ṣố và lấy dấu dương (+) ta được : lOMoAR cPSD| 58794847
M= 2 M th (1+a St h)
SSth + St h +2aSth (5) S R1
Trong đó : a= ' R2 R1 ¿ a max
Đối với đông cơ c ̣ó công xuất lớn :R1 << Xnm R1 thì a¿ . Xnm max
Lúc này (5) có dạng gần đúng : 2 M max M= (6) Smax Smax S R 2' St h=± X nm (7) 3U1P M= 2n (8) 0 Xnm 9,55 max
Cách vẽ đăc ṭ ính cơ khi không biết các thông số R1 , X1 ,R2 , X2 mà chỉ biết λM:
Xác định toạ đô 3 điểm đặc biệt :̣ 60 f n = 0 p
Toạ đô điểm ṭ ới hạn :
Thay toạ đô điểm ḷ àm viêc đ ̣ịnh mức vào phương trình đăc ṭính cơ (6) lOMoAR cPSD| 58794847 2 M max M dm= dm Smax Smax Sdm Sth Snm 2 M th
⇔ Snm + St h = M nm =2 λ M ⇔ S2 -
= 0 giải phương trình bâc 2 theo Smax ̣ max
2 λM . Sdm . Smax + S2dm
Ta được toạ đô điểm ṭ ới hạn B( Mmax , Smax) 2 Mt h
Thay S = 1 vào phương trình (6) ta được : M mm= S1th +Sth
Lấy tuỳ ý nhiều giá trị của S thay vào phương trình (6) ta tìm được M
S 0 S1 S2 S3…………….Smax
M M1 M2 M2 M3……………M
Hê ṣ ố moment mở máy :
M mm K M :1→2)
K M=9,55 M dm >1 (
Hê ṣ ố dòng điên mở ṃáy : Imm
K I= Idm (K I :4→7) Nhân x ̣ ét: 2n0>n>n0 -1M<0 n0>n>0 lOMoAR cPSD| 58794847 0 M>0 -n0 1 M<0 60 f n0= p
IV) ẢNH HƯỞNG CỦA CÁC THAM SỐ ĐẾN DẠNG ĐẶC TÍNH CƠ
1)Ảnh hưởng của điện áp Khi điên ̣ áp đăt ṿ ào đông cơ giảm :̣ 3U1 p2 M th - Từ phương trình :
Ta thấy moment tới hạn sẽ giảm theo tỉ lê ḅ ình phương lần đô suy giảm của điện ̣ áp. 3U1 p2
M th không thay đổi
- Trong khi tốc đô đ ̣ ồng bô:̣ 3U 2 1 p M th
- Và đô trượt ṭ ới hạn cũng không thay đổi.
- Mmax nói lên khả năng quá tải của đông cơ.̣
- Moment mở máy (Mmm = K2U1P2 ) giảm theo tỉ lê ḅ ình phương lần đô suy giảm củạ điên ̣ áp. n n0 Smax lOMoAR cPSD| 58794847 TN (Udm) 0 U2 U1 Hình 4.1: Đăc ṭ ính cơ của ĐC không đồng Mc M
bô 3 pha khi thay đổi điệ n ̣ áp.
2)Ảnh hưởng của điên tṛ ở
phụ hay điên kḥ áng
phụ nối tiếp trên mạch Stator :
- Khi thêm điên trở phụ Rp ṿ ào Stator thì tốc đô đ ̣ ồng bô n0 không đổi, trượt ṭ ới hạn
Smax giảm, moment tới hạn Mmax giảm và moment mở máy Mmm cũng giảm.
Hình 4.2: ĐC không đồng bô 3 pha khi thêm điện trở phụ.̣
- Khi thêm điên kḥ áng phụ Xp (giả sử Xp = Rp) vào mạch Stator ta thấy tốc đô đ ̣ ồng
bô n0 không đổi, độ trượt ṭ ới hạn giảm (nhưng vẫn còn lớn hơn khi thêm Rp), moment mở
máy Mmm giảm(bằng với khi thêm Rp). lOMoAR cPSD| 58794847
Hình 4.3: ĐC không đồng bô khi thêm điện kḥáng và điên trở phụ.̣
- Ta thấy khi thêm Xp ta tăng được khả năng quá tải của đông cơ (Mth ṇ ói lên khả năng
quá tải của đông cơ).̣
- Đăc ṭ ính cơ khi thêm Rp và Xp có dạng:
Hình 4.4 Đặc tính cơ khi thêm Rp và Xp
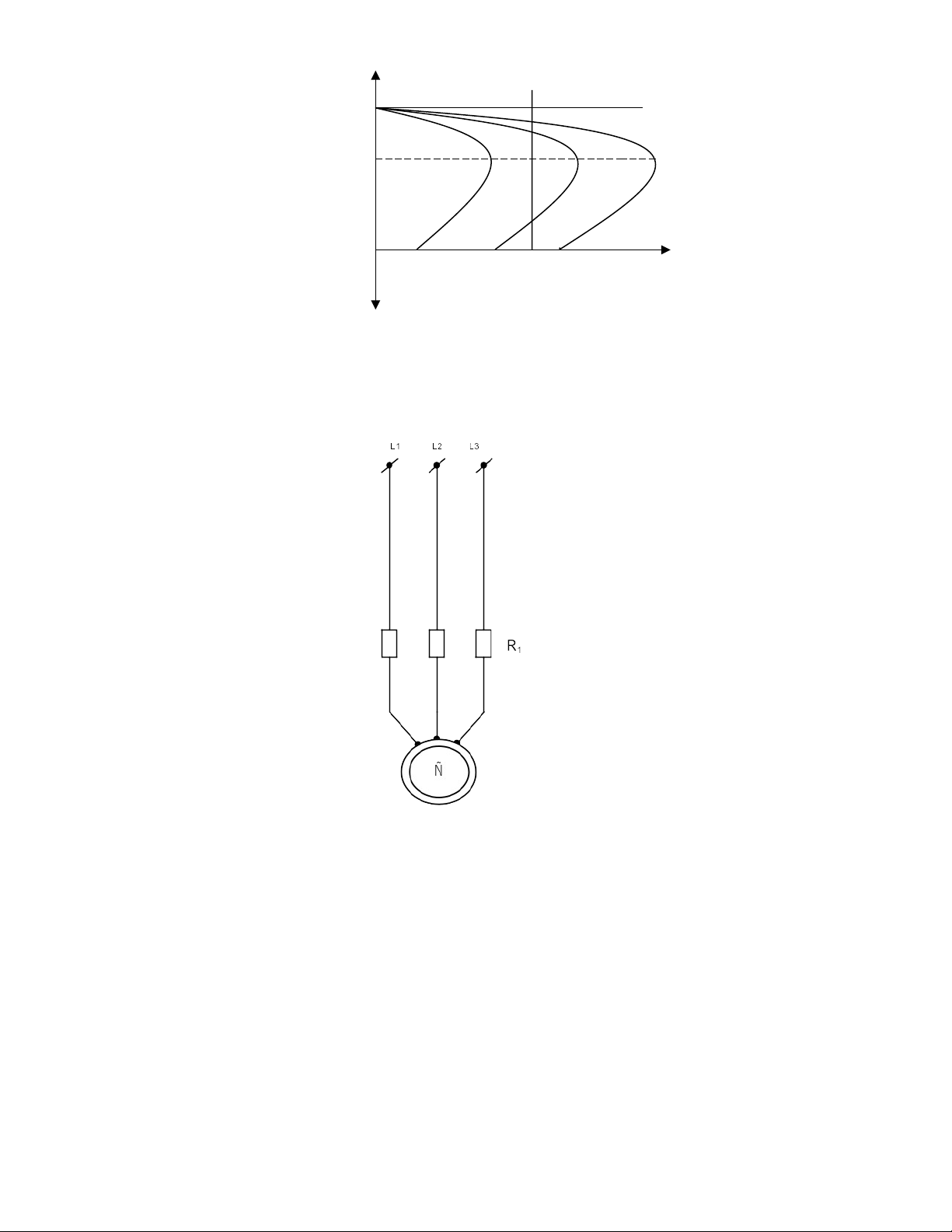
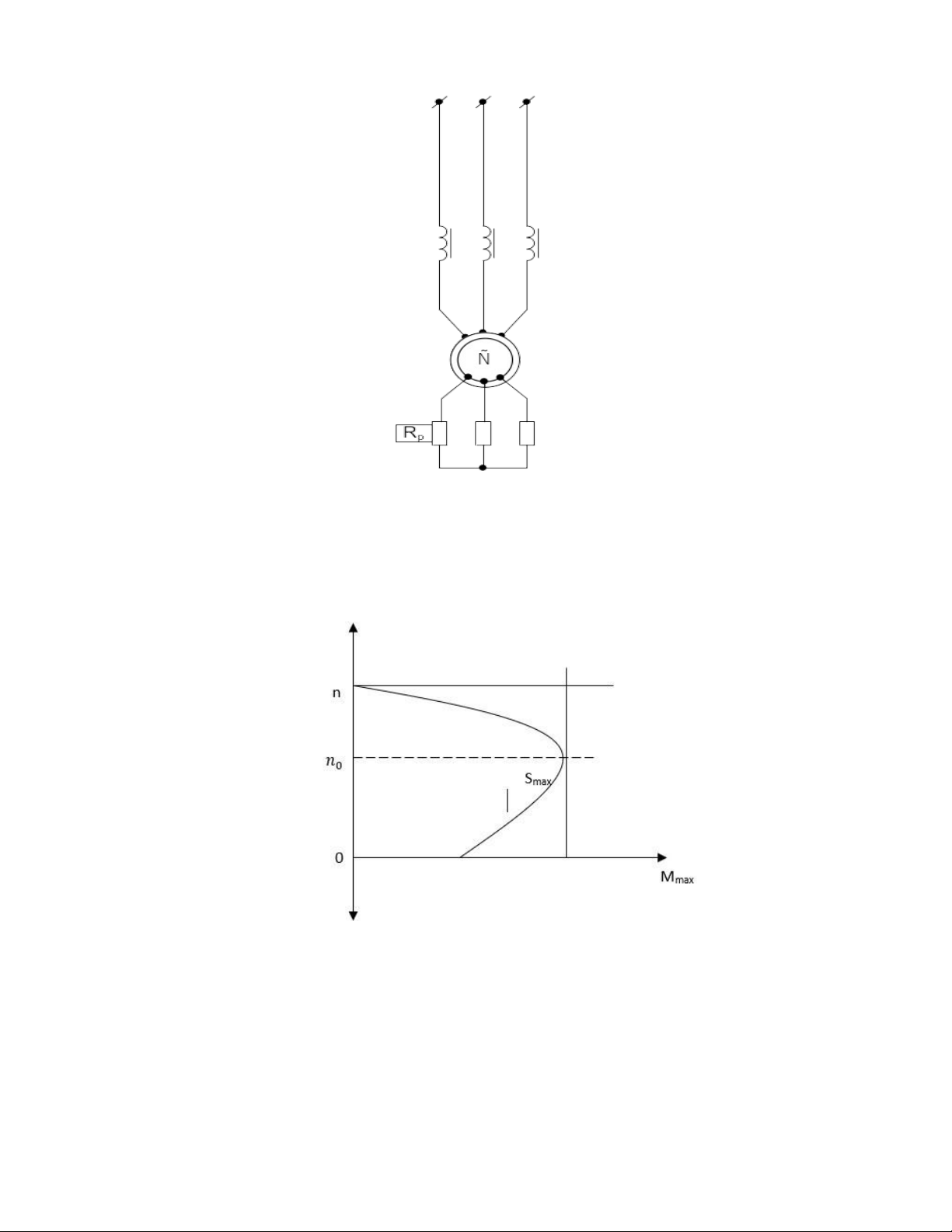
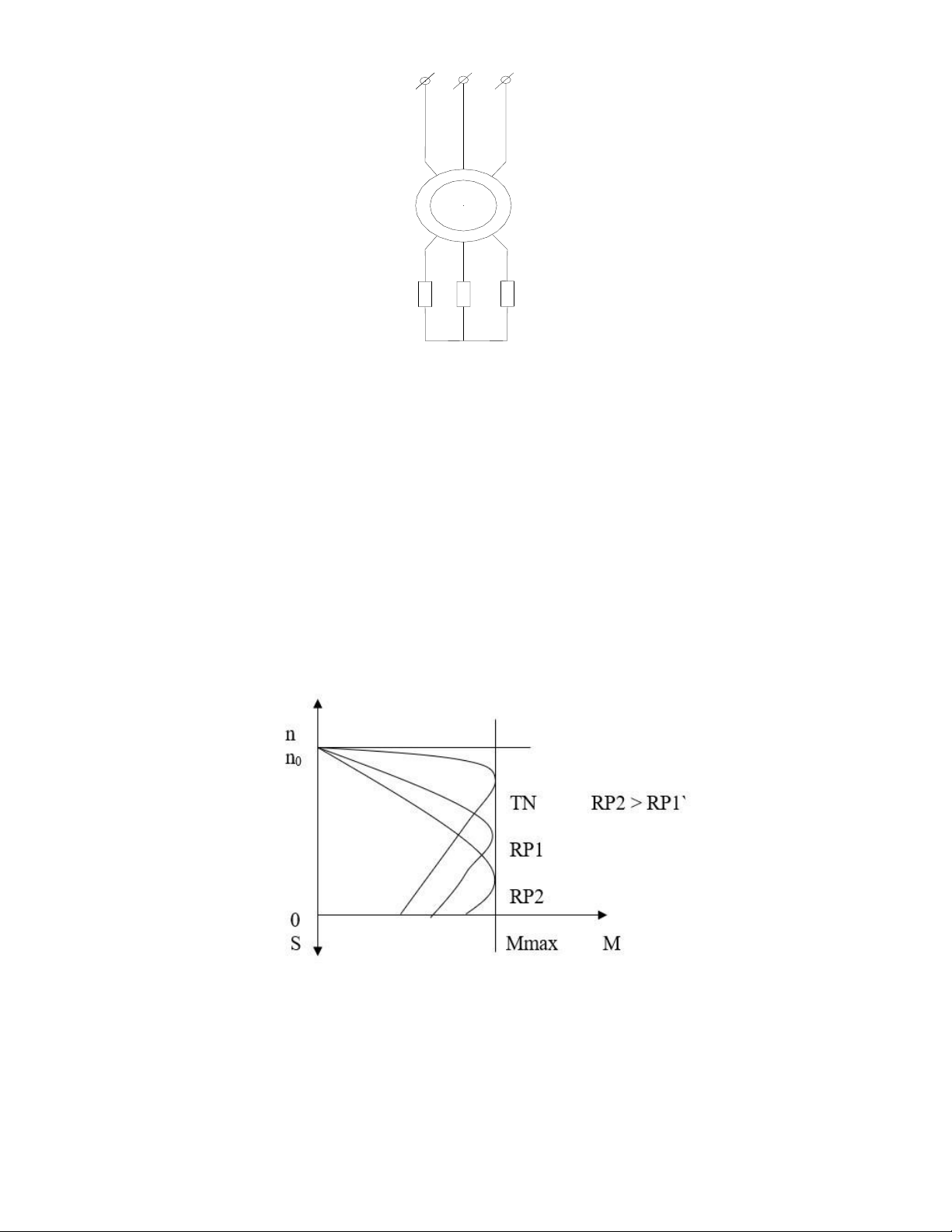
3) Ảnh hưởng của điện trở phụ nối tiếp vào dây quấn Rotor L1 L2 lOMoAR cPSD| 58794847 L3 Rp
Hình 4.5 ĐC KĐB 3 pha khi thêm điên trở phụ ṇ ối tiếp vào dây quấn Rotor.
- Đông cơ không đ ̣ ồng bô Rotor ḷ ồng sóc (hay rotor ngắn mạch) không thể thay đổi
được điên trở ṃ ạch rotor .Viêc thay đổi chỉ ṣ ử dụng đối với đông cơ không đ ̣ ồng bô rotoṛ
dây quấn vì mạch rotor có thể nối với điên trở ngọ ài qua hê vòng trượt -chổi than.(nhự hình vẽ)
- Dễ thấy ,điên trở ṃ ạch rotor R2-do đó điên trở quy đổi R2'-chỉ c ̣ ó thể thay đổi về phía
tăng .Khi R2'tăng thì đô trượt ṭ ới hạn tăng ,còn tốc đô đ ̣ ồng bô ṿ à môment tới hạn giữ nguyên.
Hình 4.6 Đăc ṭ ính cơ khi thêm điên trở phụ ṇ ối tiếp vào dây quấn Rotor.
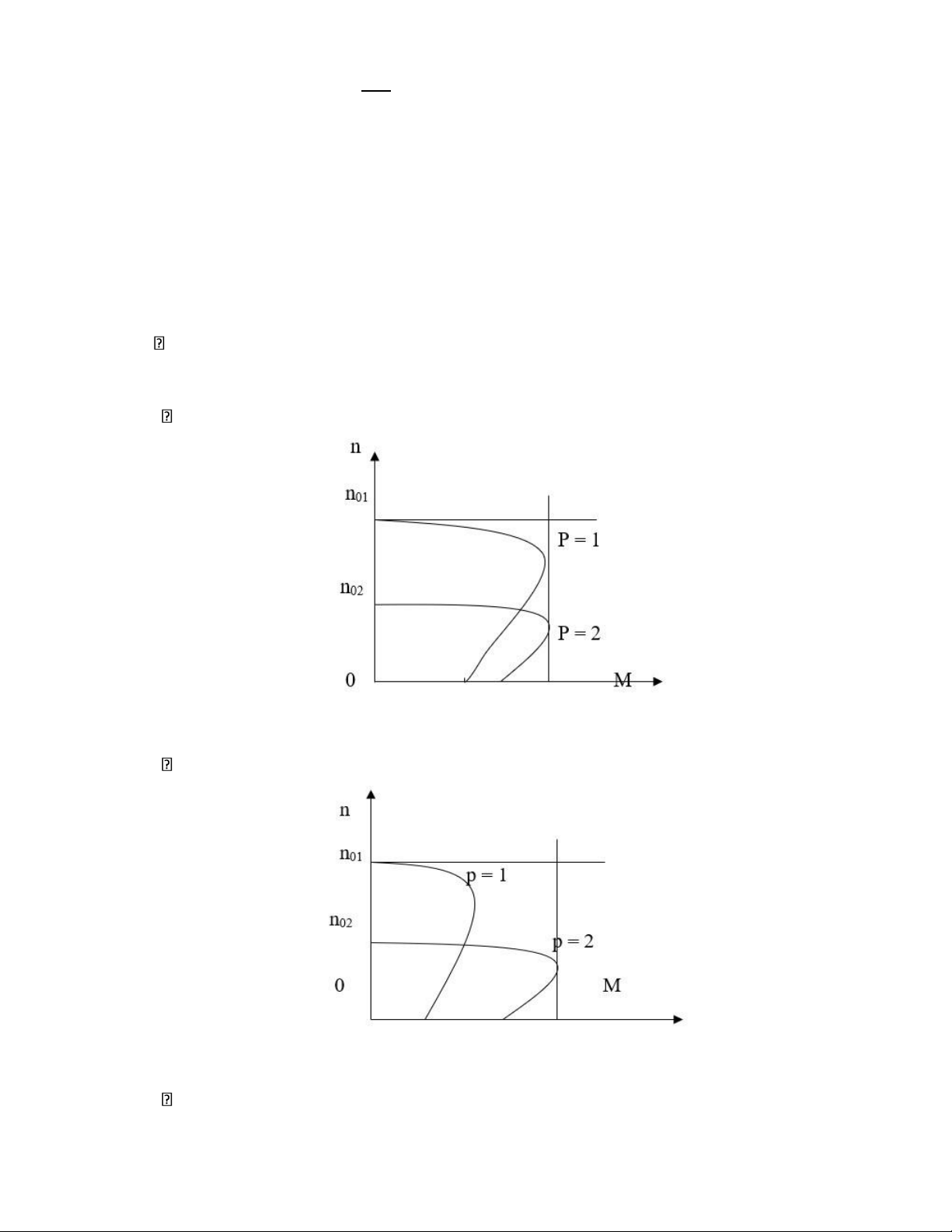
4) Ảnh hưởng của số đôi cặp từ P: lOMoAR cPSD| 58794847 60.f
Ta có : n=n0 (1−s)= P (1−s)
- Khi tăng (giảm) số đôi cực từ p thì tốc đô đ ̣ ồng bô n0 giảm (tăng) nên ṭ ốc độ
quay của Rotor giảm (tăng). Còn Smax không phụ thuôc ṿ ào p nên không thay đổi, nghĩa
là đô cứng của đặ c ṭ ính cơ vẫn giữ nguyên. Nhưng khi thay đổi số đôi cực từ sẽ phải thay
đổi cách đấu dây ở Stator đông cơ nên mộ t ṣ ố thông số như R1, X1 có thể thay đổi và do
đó tuỳ trường hợp sẽ ảnh hưởng khác nhau đến moment tới hạn Mmax của đông cơ.̣
Dạng của đăc ṭ ính cơ khi thay đổi số đôi cực từ p còn phụ thuôc ṿ ào yêu cầu của viêc đổi ṭ ốc :
Đổi tốc đô đảm bảo moment không đổị ( Δ/YY ) Hình 4.7
Đổi tốc đảm bảo công suất không đổi (YY / Δ) Hình 4.8
Đổi tốc đảm bảo moment và công suất không đổi (YY /Y )
Tài liệu liên quan:
-

Thiết kế hệ truyền động điện cho băng tải sử dụng động cơ không đồng bộ 3 pha trong việc vận chuyển thùng táo từ khâu sát khuẩn vào kho lưu trữ trong nhà máy sản xuất khẩu táo | Đồ án Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
163 82 -

Tính Toán & Thiết Kế Truyền Động Điện Cho Cầu Trục | Môn Truyền động điện 1 - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
101 51 -

Chương 1 Môn Truyền động điện 1 | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
96 48 -

Trình bày các chỉ tiêu và các phương pháp điều chỉnh tốc độ trong truyền động điện | Đồ án môn Truyền động điện trường Đại học sư phạm kỹ thuật TP Hồ Chí Minh
389 195