Tổng hợp bài giảng môn Thiết kế hệ thống cơ điện tử_Đặng Thái Việt| Bài giảng môn Thiết kế hệ thống cơ điện tử| Trường Đại học Bách Khoa Hà Nội
Tổng hợp bài giảng môn Thiết kế hệ thống cơ điện tử_Đặng Thái Việt| Bài giảng môn Thiết kế hệ thống cơ điện tử| Trường Đại học Bách Khoa Hà Nội. Tài liệu gồm 268 trang giúp bạn ôn tập và đạt kết quả cao trong kì thi sắp tới. Mời bạn đọc đón xem.
Môn: Thiết kế hệ thống cơ điện tử 13 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.4 K tài liệu
Tác giả:











Preview text:
ME3081: Mechatronic System Design Lecturer: PhD. Dang Thai Viet
Mechatronics Department, School of Mechanical Engineering, HUST Viet.dangthai@hust.edu.vn 2
Chương 1. Tổng quan hệ thống Cơ điện tử
ME3081: Mechatronic System Design Mục 1. Khái niệm
Mục 2. Định nghĩa Cơ điện tử
Mục 3. Quá trình thiết kế HTCĐT
Mục 4. Mục tiêu và ứng dụng 3 1.1. Khái niệm (1)
Hình 1.1 Thành phần cấu thành HT CĐT
• Cơ điện tử là một phương pháp được sử dụng cho việc thiết kế tối ưu các sản phẩm cơ - điện.
• Hệ thống cơ điện tử là đa ngành, bao gồm bốn thành phần cơ bản: Cơ khí, điện - điện tử, khoa
học máy tính và công nghệ thông tin. 4 1.1. Khái niệm (2)
• Physical System Modeling (Mô hình hóa hệ thống
vật lí): xây dựng các dạng biểu diễn toán học của các hệ thống vật lí.
• Signal and Systems (Tín hiệu và Hệ thống): truyền
dữ liệu, giá trị giữa các khối trong hệ thống, đảm bảo quan hệ vào ra.
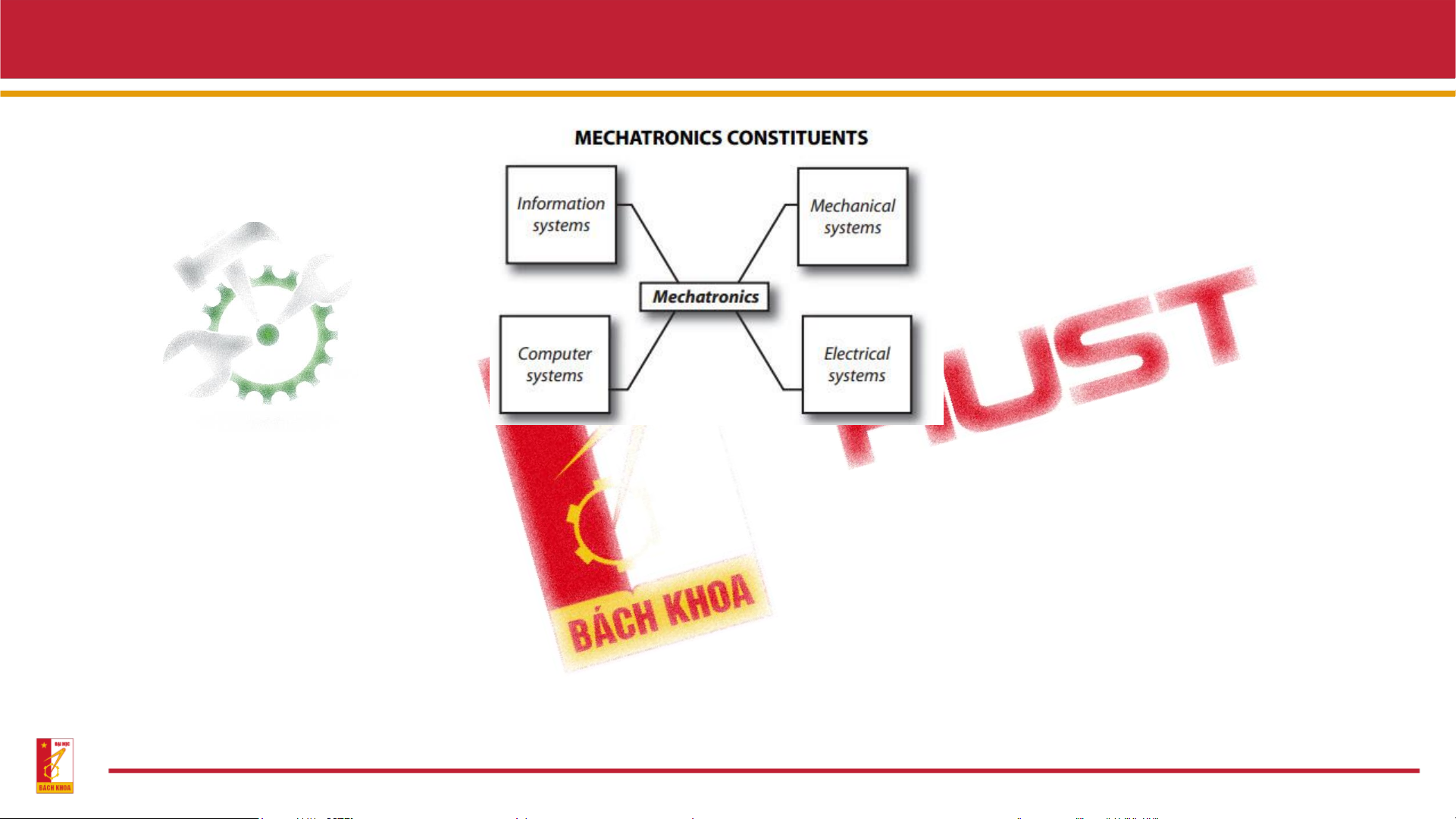
Hình 1.2 Mối quan hệ giữa các thành phần trong HT CĐT
• Computer and Logic System (Máy tính và hệ thống logic). Tính toán, thiết lập các thuật toán và
chương trình tính toán cho bộ điều khiển trong HTCĐT.
• Software and Data Acquistion (Phần mềm và thu thập dữ liệu). Phần mềm hỗ trợ, thu thập,
truyền dữ liệu trong hệ thống và giao tiếp kết nối với các thiết bị và hệ thống bên ngoài 5 1.1. Khái niệm (3)
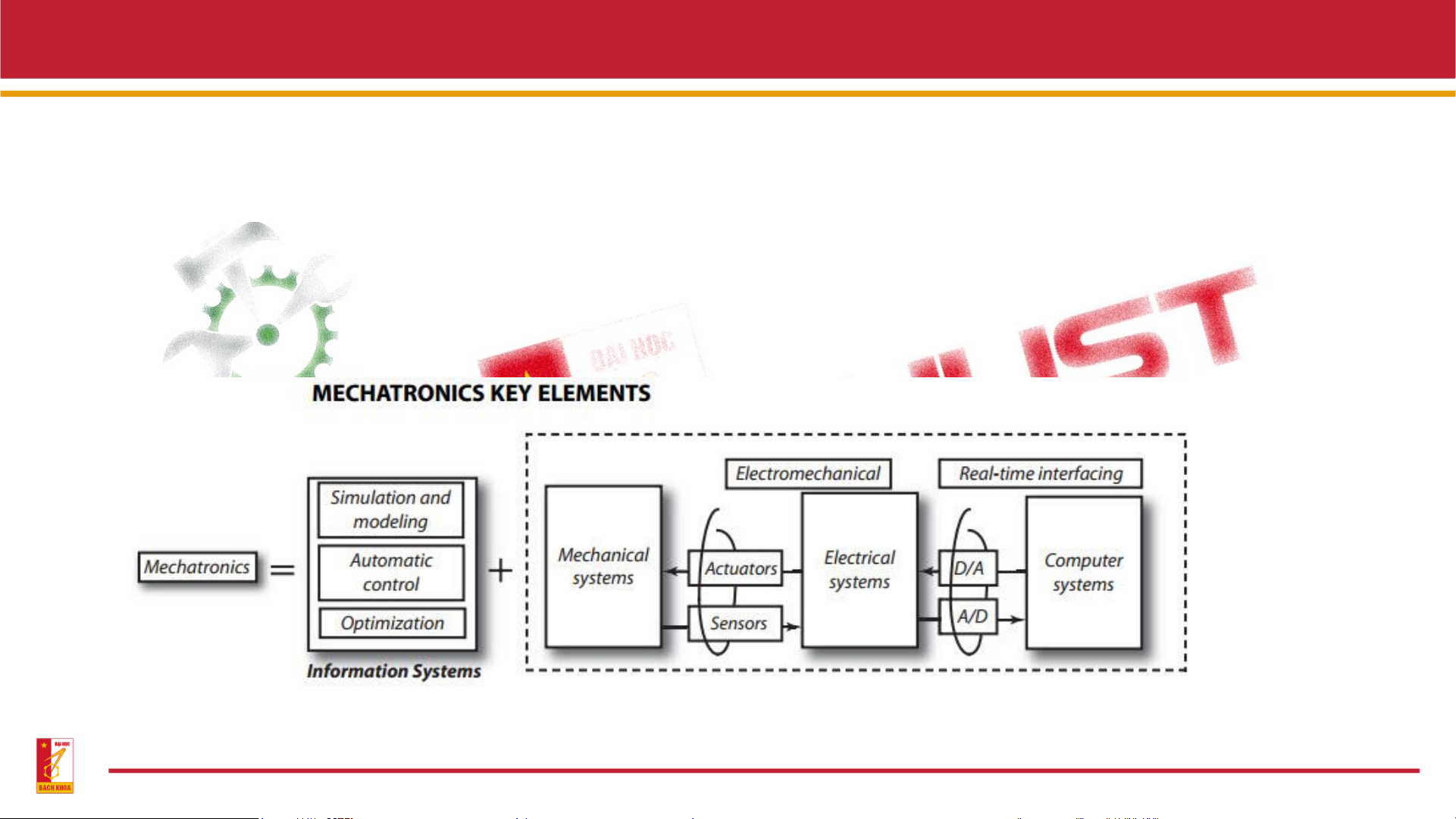
• Sensors and Actuators (Cảm biến và phần tử chấp hành). Đóng vai trò cơ cấu đo các giá trị và
các phần tử chấp hành các tín hiệu điều khiển tạo đáp ứng đầu ra như mong muốn. • Hệ thống bao gồm cơ khí, điện, và hệ thống máy tính
cũng như cơ cấu chấp hành, cảm biến, và giao diện thời gian thực.
Hình 1.3 Phần tử cơ bản hệ thống Cơ điện tử 6 1.1. Khái niệm (4) ➢ Ví dụ 1.1:
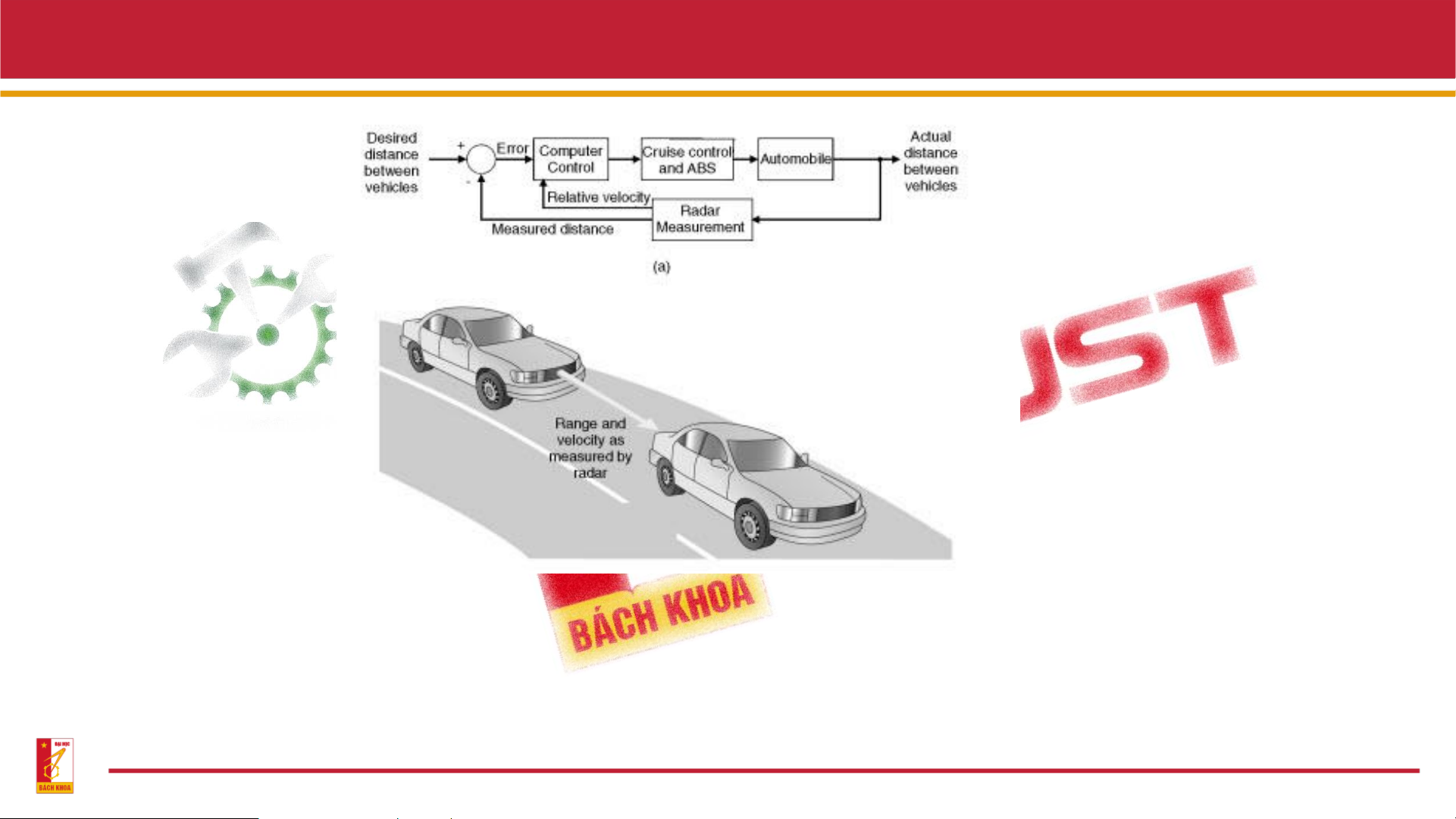
Hình 1.4 Hệ thống cơ điện tử trên ô tô
• Bài toán điều khiển vận tốc và giữ khoảng cách an toàn khoảng cách 2 xe khi di chuyển trên cao tốc. 7 1.2. Định nghĩa (1)
❑ Định nghĩa Cơ điện tử
• Tên gọi Cơ điện tử nguồn gốc năm 1969 do kỹ sư Tetsura Mori, tại
công ty Nhật Yasakawa Electric Company.
Mechatronics = Mechanism + electronics
Hình 1.5 Các lĩnh vực cơ bản tao nên Cơ điện tử
• Cùng với sự phát triển của khoa học công nghệ và yêu cầu của xã hội về việc đảm bảo năng
suất và giám sát chất lượng. Cơ điện tử được tạo thành từ 4 ngành Kỹ thuật cơ khí (ME), Điện-
Điện tử (EE), Công nghệ máy tính (CS) và Tự động hóa-Điều khiển tự động (AC). 8 1.2. Định nghĩa (2)
• Cơ điện tử không chỉ là tự động hóa các hệ thống kỹ thuật, mà là đỉnh cao của tự động hóa các
hệ thống kỹ thuật bởi sự hiện diện của điều khiển bằng máy tính và tích hợp công nghệ thông tin.
• Kỹ sư cơ điện tử có nhiệm vụ thiết kế phần cơ khí, tích hợp nó với các thiết bị điện – điện tử, tạo
ra phần cứng của hệ thống, tìm quy luật điều khiển, thiết kế phần mềm điều khiển và quản lý dữ liệu.
o Vai trò của ngành Cơ khí: thiết kế phần cơ cho máy móc thiết bị, đặc biệt các cơ cấu chính xác.
o Vai trò của ngành Điện-Điện tử: các thiết bị và cơ cấu chấp hành điện-điện tử. Cùng cơ khí
tạo thành phần cứng hệ thống.
o Vai trò của ngành Công nghệ thông tin: thiết lập các luật điều khiển, chương trình điều khiển và giám sát. 9
1.3. Thiết kế hệ thống CĐT (1)
❑ Quá trình thiết kế Hệ thống Cơ điện tử
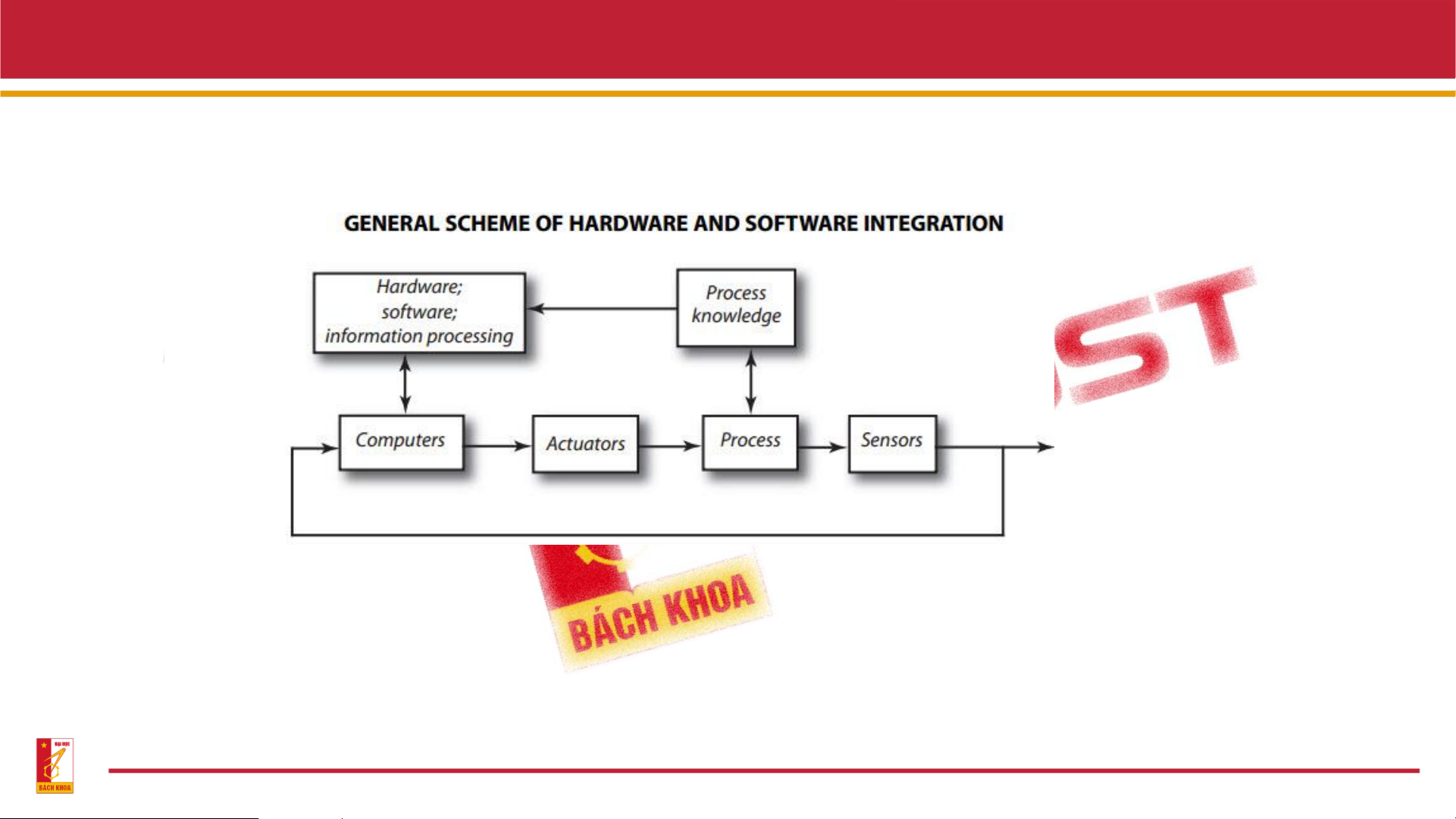
Hình 1.6 Sơ đồ tổng quát của sự tích hợp phần cứng và phần mềm trong HT Cơ điện tử
• Tích hợp phần cứng từ việc thiết kế hệ thống cơ điện tử như là một hệ thống tổng thể với việc
đưa các cảm biến, bộ truyền động và máy vi tính vào hệ thống cơ khí. 10
1.3. Thiết kế hệ thống CĐT (2)
• Tích hợp phần mềm chủ yếu dựa trên các chức năng điều khiển tiên tiến từ việc thiết kế luật điều
khiển, thu thập, truyền dữ liệu và chương trình điều khiển.
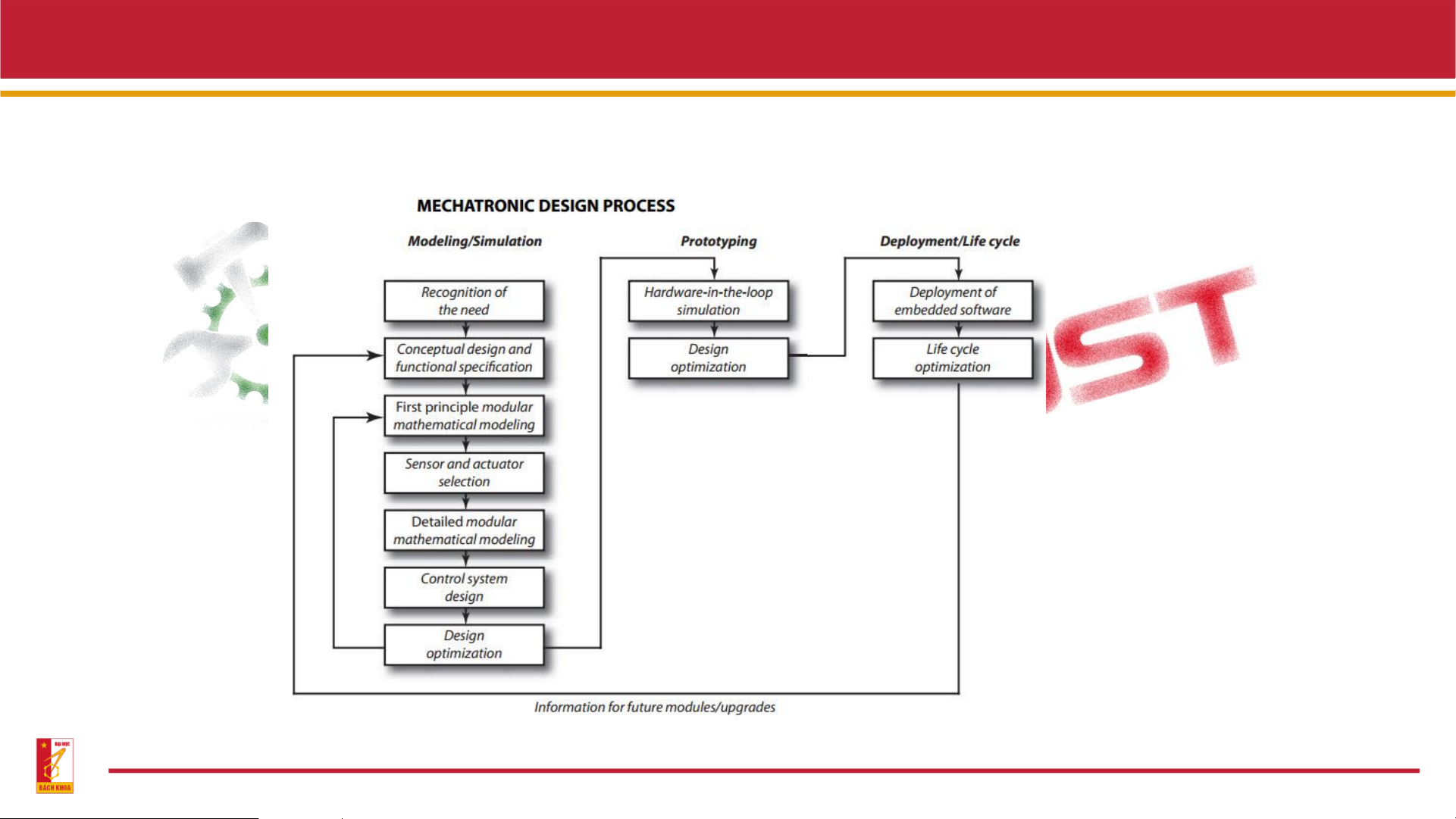
Hình 1.7 Quá trình thiết kế hệ thống Cơ điện tử 11
1.3. Thiết kế hệ thống CĐT (3)
• Quá trình thiết kế HT CĐT bao gồm 3 pha chính: Modeling and Protyping Deployment simulation
Hình 1.8 Các bước thiết kế hệ thống Cơ điện tử
• Modeling: Mô hình hóa hệ thống vật lý biểu diễn mối quan hệ vào ra của hệ thống dưới dạng sơ
đồ khối (Hàm quan hệ toán học)
• Simulation: Mô phỏng là quá trình được hỗ trợ bởi máy tính và phần mềm mô phỏng, biểu diễn
lại quan hệ vào ra của mô hình thông qua các hàm quan hệ toán học, dưới sự đáp ứng các yêu cầu kỹ thuật đặt ra. 12
1.3. Thiết kế hệ thống CĐT (4)
• Protyping: Tạo mẫu bao gồm quá trình phân tích (Analyse) và tổng hợp (synthesize) các số liệu
mô tả hệ thống vật lý. Trên cơ sở đó thiết lập được quan hệ vào ra vào hệ thống và tiến hành quá
trình mô hình hóa hệ thống.
• Deployment: Trên cơ sở của mô hình mẫu tiến hành thiết kế và đánh gái chất lượng của hệ thống
thiết kế theo các yêu cầu kỹ thuật đặt ra.
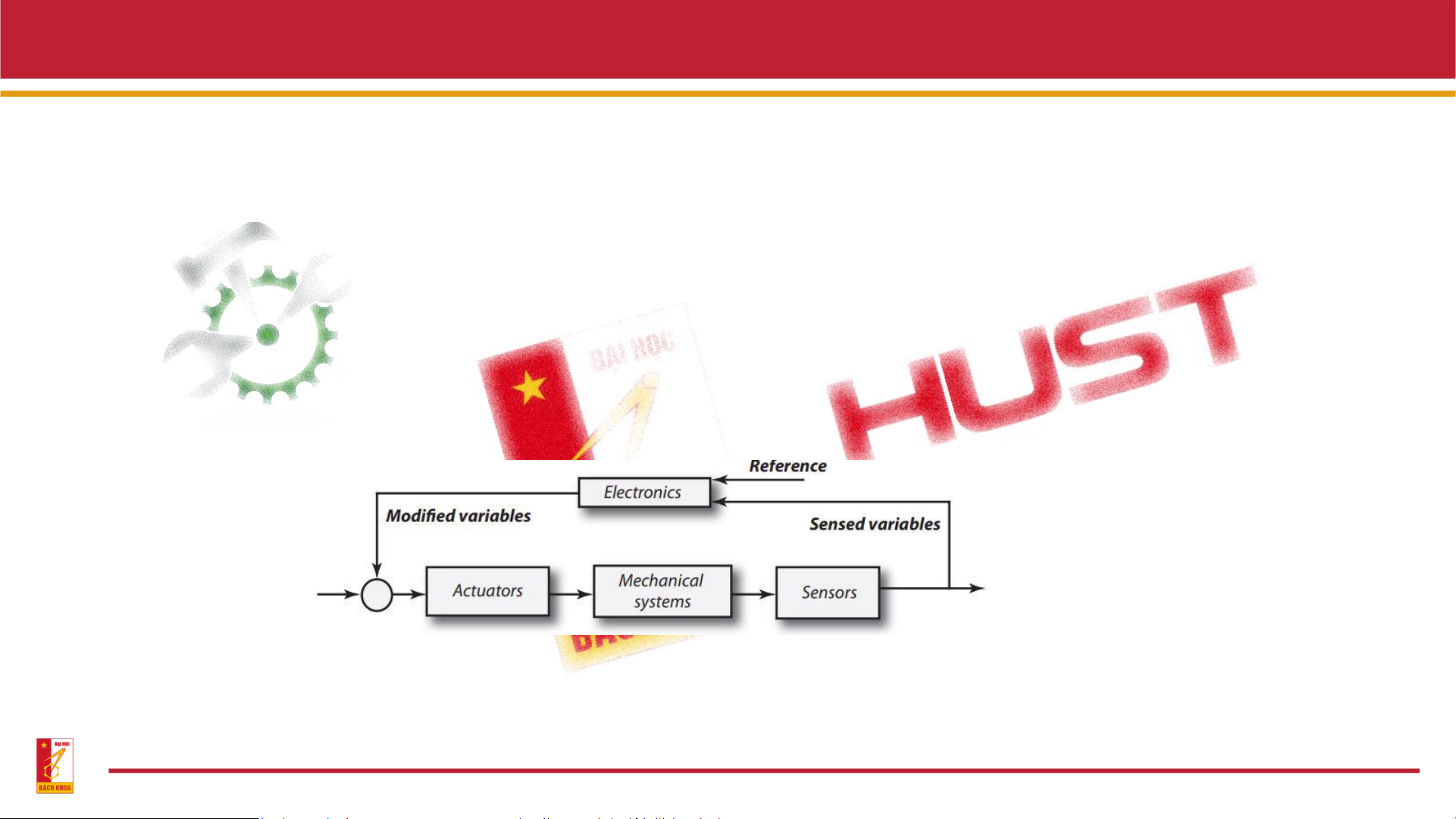
Hình 1.9 Phần tử cơ bản trong sơ đồ khối HT CĐT 13
1.4. Mục tiêu và ứng dụng (1)
❑ Mục tiêu và ứng dụng
• Sản phẩm cơ điện tử rất đa dạng, tuy nhiên hai sản phẩm chủ yếu là robot công nghiệp và máy
công cụ điều khiển số CNC.
• Các sản phẩm yêu cầu cao về cơ khí chính xác, thiết bị điều khiển, cảm biến và phần mềm điều
khiển nhằm đáp ứng cơ bản về tự động hóa là nhanh và chính xác.
• Hai bài toán điều khiển chính là tốc độ và vị trí.
• Các sản phẩm cơ điện tử ngày càng có công nghệ tiên tiến đem lại nhiều tiện ích, tăng sức cạnh
tranh cho sản xuất công nghiệp và cho các lĩnh vực khác. 14
1.4. Mục tiêu và ứng dụng (2)
• Cơ điện tử có mặt đóng vai trò quan trọng trong tất cả các lĩnh vực từ trước khi khái niệm Cơ điện tử ra đời:
o Khoa học vũ trụ: Nghiên cứu chế tạo các tàu thám hiểm vũ trụ, các vệ tinh, robot thám
hiểm, thiết bị bay và các hệ thống phòng thủ trong vũ trụ.
o Quân sự: Chế tạo các loại vũ khí, khí tài hiện đại, các máy bay tên lửa và các hệ thống
phòng không, các hệ thống tấn công các loại vũ khí hiện đại dung cho bộ binh, pháo binh, tàu chiến,… 15
1.4. Mục tiêu và ứng dụng (3)
• An ninh: Các hệ thống bảo mật, các hệ thống giám sát, hệ thóng đảm bảo an ninh mạng, hệ
thống bảo vệ khu vực trọng yếu,…
• Giao thông vận tải: Các hệ thống lái tự động, thiết bị không người lái, hệ thống giám sát, điều
hành tự động, các thiết bị tự động dung cho máy bay, tàu chiến, tàu thủy, tàu hỏa, ô tô, xe tự hành,…
• Công nghiệp: Các máy công cụ điều khiển số CNC, các robot công nghiệp, AGV, các băng tải
và thiết bị tự động khác,…
• Y sinh: Robot phẫu thuật, thiết bị y sinh kỹ thuật cao, thiết bị phân tích hóa nghiệm tự động và chính xác cao. 16
1.4. Mục tiêu và ứng dụng (4)
• Những năm 80, robot công nghiệp phát triển mãnh mẽ trong thám hiểm không gian và công
nghiệp ô tô. Sau đó, các thành tựu được ứng dụng phổ biến trong nhiều lĩnh vực công nghiệp vào đầu nhưng năm 90.
Hình 1.10 Dây chuyền tự động sản xuất ô tô 17
1.4. Mục tiêu và ứng dụng (5)
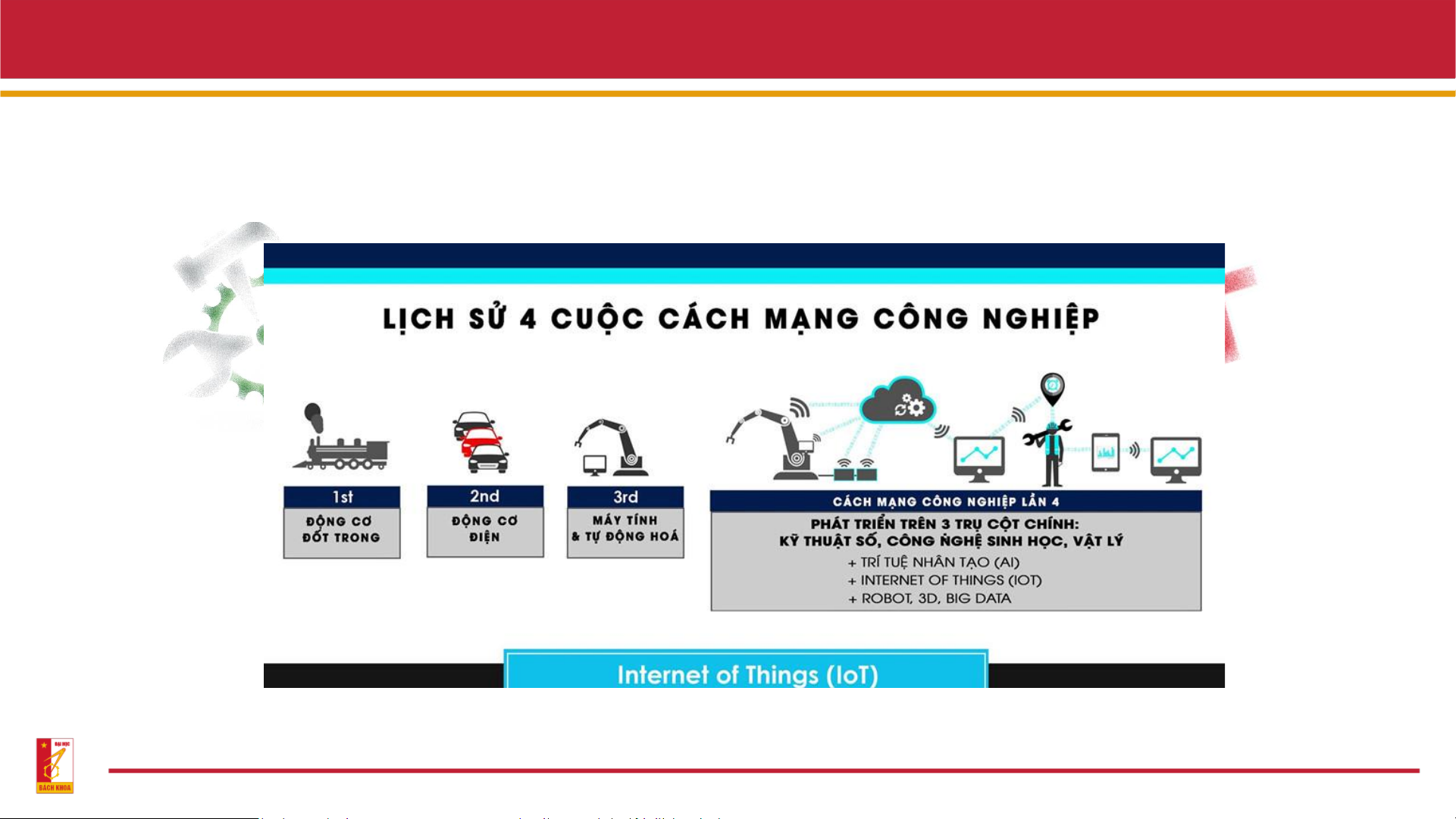
• Trong thế kỷ 20 và 21, con người chế tạo những robot thám hiểm đại dương và vươn ra ngoài
vũ trụ, robot, xử lý dữ liệu lớn, trí tuệ nhân tạo,…
Hình 1.11 Cuộc cách mạng công nghiệp trong lịch sử 18
1.4. Mục tiêu và ứng dụng (6)
Hình 1.12 Các ứng dụng công nghệ cao của Cơ điện tử 19 THANK YOU 20
Tài liệu liên quan:
-

Đề cương ôn tập cuối kỳ hệ thống cơ điện tử | Đại học Bách khoa Hà Nội
34 17 -
Đồ án Thiết kế Hệ Thống Phân Loại Sản Phẩm Theo Chiều Cao | Môn Thiết kế hệ thống cơ điện tử - Đại học Bách Khoa Hà Nội
43 22 -

Hướng dẫn và báo cáo thí nghiệm Môn Thiết kế hệ thống cơ điện tử | Đại học Bách Khoa Hà Nội
48 24 -

Đồ án Phân loại sản phẩm môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
103 52 -

Đồ án môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
81 41