Tự động hóa công nghệ xử lý nước thải tại toà nhà đô thị | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
Tóm tắt: Việc xử lý nước thải sinh hoạt trong các khu đô thị và tòa nhà cao tầng hiện nay là một vấn đề cấp thiết. Trạm xử lý nước thải (XLNT) có chức năng xử lý toàn bộ nước đen và nước xám đạt tiêu chuẩn của Bộ Tài nguyên môi trường (QCVN 14:2008/BTNMT) trước khi xả ra hệ thống thoát nước chung của thành phố. Tài liệu được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Xử lý nước thải đô thị (XLNTDT) 10 tài liệu
Trường: Trường Đại học Nông Lâm thành phố Hồ Chí Minh 210 tài liệu
Tác giả:
Preview text:
Thông tin khoa học công nghệ
TỰ ĐỘNG HÓA QUY TRÌNH CÔNG NGHỆ XỬ LÝ NƯỚC THẢI
TRONG CÁC TÒA NHÀ CAO TẦNG VÀ KHU ĐÔ THỊ
Đỗ Quảng Đại*, Khắc Trung Kiên, Lê Khánh Thành, Vũ Quốc Huy
Tóm tắt: Việc xử lý nước thải sinh hoạt trong các khu đô thị và tòa nhà cao
tầng hiện nay là một vấn đề cấp thiết. Trạm xử lý nước thải (XLNT) có chức năng
xử lý toàn bộ nước đen và nước xám đạt tiêu chuẩn của Bộ Tài nguyên môi
trường (QCVN 14:2008/BTNMT) trước khi xả ra hệ thống thoát nước chung của
thành phố. Hệ thống XLNT được tự động hóa sẽ đảm bảo được được các yêu cầu
về tham số công nghệ và các yêu cầu về quản lý, quan trắc dữ liệu, làm tăng hiệu
quả xử lý nước, giảm nhân công và chi phí vận hành. Bài báo này trình bày giải
pháp tự động hóa và một số thuật toán điều khiển được thực thi trên PLC
Siemens, thực hiện tự động hóa quy trình công nghệ XLNT hiện nay.
Từ khóa: Xử lý nước thải; Tự động hóa; PLC.
1. QUY TRÌNH CÔNG NGHỆ XỬ LÝ NƯỚC THẢI
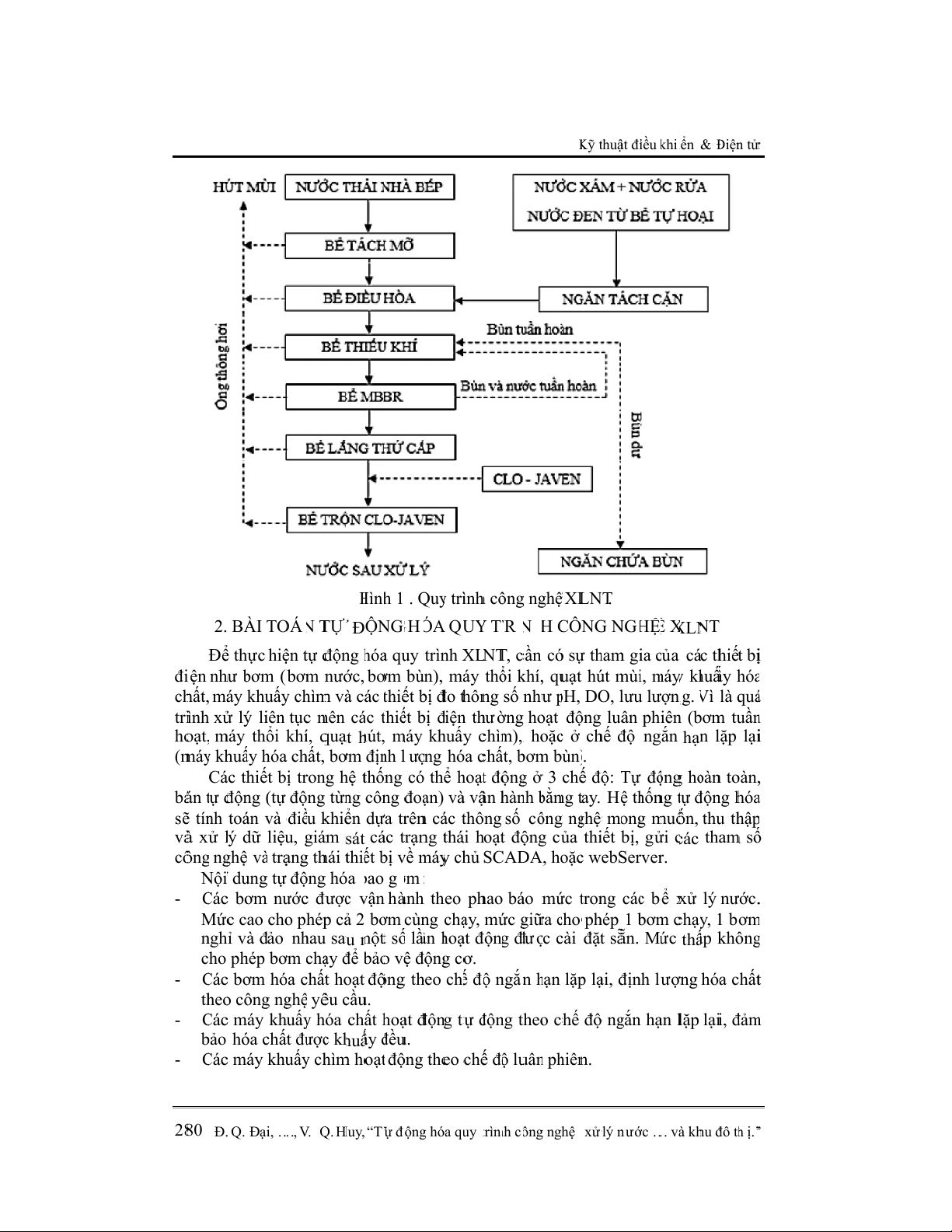
Trạm XLNT là một tổ hợp các thiết bị hợp khối có nhiệm vụ xử lý toàn bộ nước
đen và nước xám [1], [2], [3]. Nước đen (nước thải từ xí tiểu) có hàm lượng chất
hữu cơ rất cao, do vậy nước đen sẽ được xử lý sơ bộ bằng cách lên men yếm khí
nhằm làm giảm phần lớn lượng chất hữu cơ, chất lơ lửng trước khi được bơm sang
bể điều hòa thuộc công trình xử lý sinh học hiếu khí. Nước xám (nước thải từ nhà
bếp) có hàm lượng dầu mỡ cao sẽ được xử lý sơ bộ lắng cặn và tách mỡ tại bể tách
mỡ. Nước thải sau đó sẽ chảy tràn sang ngăn bơm và được bơm vào bể điều hòa (hình 1).
Tại bể điều hòa, nước thải được khuấy trộn đều đảm bảo các dòng nước thải
được pha trộn ổn định nồng độ chất ô nhiễm vào các bể xử lý sinh học phía sau.
Sau khi được khuấy trộn, nước thải sẽ được bơm sang bể thiếu khí.
Quá trình xử lý thiếu khí-hiếu khí có giá thể vi sinh di động (bể MBBR) sẽ xử
lý các chất hữu cơ và nitơ có trong nước thải. Giá thể vi sinh là nơi các vi khuẩn
trú ngụ, phát triển và tiêu thụ các chất dinh dưỡng có trong nước thải. Trong bể còn
có các thiết bị phân phối khí tạo điều kiện cho các vi khuẩn hiếu khí hoạt động.
Dòng nước sau khi được xử lý ở bể MBBR, amoni trong nước thải đã được chuyển hóa thành NO -
3 , sẽ được tuần hoàn về đầu bể thiếu khí để khử Nitơ.
Sau khi qua bể MBBR, nước thải vẫn còn hàm lượng chất rắn lơ lửng. Vì vậy,
nước thải sẽ được dẫn qua bể lắng. Bể lắng bao gồm ngăn phản ứng và ngăn lắng.
Trong giai đoạn đầu cần bổ sung chất keo tụ để tăng hiệu quả lắng. Bùn từ bể lắng
sẽ được thu sang ngăn thu bùn, hỗn hợp bùn nước sẽ được tuần hoàn về đầu bể
thiếu khí để bổ sung lượng vi sinh hoạt tính. Bùn dư sẽ được bơm về bể lắng bùn.
Nước thải sau khi qua bể lắng được dẫn qua bể trộn Clo diệt trùng. Hóa chất sử
dụng là dung dịch Clo-Javen. Sau khi được khử trùng bằng Clo, nước thải được
dẫn qua bể tiếp xúc. Sau một thời gian lưu nước, hầu hết các vi khuẩn gây bệnh
được tiêu diệt, nước thải đảm bảo yêu cầu chất lượng của Bộ Tài nguyên - Môi
trường và được bơm ra hệ thống cống thoát nước của thành phố.
Toàn bộ lượng khí phát sinh từ công trình sẽ được thu gom về hệ thống xử lý
khí mùi qua các ống thu gom (nhờ quạt hút) và được xử lý bằng hệ thống lọc than
hoạt tính trước khi nối với hệ thống thông hơi của tòa nhà.
Tạp chí Nghiên cứu KH&CN quân sự, Số Đặc san TĐH, 04 - 2019 279
Kỹ thuật điều khi ển & Điện tử H Hình 1 . Q Quy
y trììnhh côôngg ngghệXLLNT. 2. BÀ ÀI TO OÁN T TỰỰ ĐỘN NG HÓA A QUY Y TTR N H C CÔNG G N NGHỆỆ X XLN NT
Đểể thực hiệện ttự đđộnng h hóaa quuy trìnnh X
XLNTT, ccần cóó sựự thham
m giia ccủa các thhiết bịị điện như bbơm m (bơm
m nnướớc, bơơm bùn), máy thổổi kkhí,, quuạt húút m mùii, m máyy kh huấấy hhóa a
chhất, mááy khuuấyy chhìm
m vàà cáác thiếết bbị đđo thônng số nhưư p pH, DO O, llưuu lưượn g. V Vì là qquáá
trìình xửử lýý liiên tụcc nnên các thiếết bbị đ
điệnn thhư ờờng hooạt độộng luâân phiênn (bbơm m tuuần n hooạt, m
máy thổi khíí, qquạạt hhút, máy khhuấy cchìm
m),, hooặcc ở chhế đđộ ngắn hạn llặp lạii (m máy
y khhuấấy hhóaa chhất, bơơm địn nh ll ượ ợng hóóa cchất, bbơm m bùn)).
Các thhiết bị trrong hhệ tthống có thể hhoạtt độộngg ở 3 chếế độ: Tự độ ộngg ho oànn tooàn,,
báán ttự đđộnng ((tự động từn
ng cônng đoạạn) vàà vậận hhànnh b bằnng tay.. Hệ th
hốnng ttự đđộnng hhóaa
sẽẽ tínnh toáán vvà điề
ều kkhiểển dựa trrênn cáác tthông số côông ng ghệ mongg m muốốn, thuu thhậpp
vàà xửử lý ddữ liệuu, ggiám sát cáác ttrạnng tthái hhoạtt độộngg của thiiết bị, gửửi ccác tham sốố côông g ngghệ và
à trạạngg thhái tthiếết bbị vvề m máyy chhủ SC CAD DA, hooặcc webSSerrverr. N
Nội duungg tựự độộngg hóóa bao gồm: - C
Cácc bơơm nưướcc đưượcc vvận hàành thheo phhao bááo mứ
ức ttronng cácc bbể xxử lý nưước.. M
Mứcc cao choo phépp cảả 2 bơ
ơm cùnng chạạy, mứức ggiữữa ccho phhép 1 bbơm m cchạy, 11 bơm m nnghỉ và đ đảo nhhau sau m mộtt số ố lầần h hoạạt đđộng đư ợ
ợc ccài đặtt sẵẵn. Mức thấấp kkhôôngg
ccho phhép bơơm chạạy đđể bảoo vệệ độngg cơơ. - C
Cácc bơơm hóóa cchấtt hooạt độộng theo chế độ nngắn h
hạn lặpp lạại, đđịnnh lượng hóa cchấtt
thheoo côôngg ngghệệ yêêu ccầuu. - C
Cácc máy khuấyy hóa chất hhoạạt đđộng tự đ
độnng ttheoo chế độ nggắnn hạạn llặp lạii, đđảm m bbảo hóóa cchất đư
ượcc khhuấấy đđềuu. - C Cácc máy khuuấyy chhìm
m hooạtđộộng theeo chếế độ ộ luuân n phhiênn. 2880 Đ
. Q. Đại, …, V. Q. Huy,“Tự động hóa quy trìn h công nghệ xử lý nước … và khu đô th ị.”
Thông tin kh oa học công nghệ
- CCác bơơm bùn lắắngg hooạt độ ộng theeo chếế độ
ộ ngắnn hạạn lặpp lại.
- CCác thôngg số về llưuu lưượng nnướ ớc, hàm m llượ
ợng oxxy hhòaa taan ttronng nước (DO) vàà
ppH đượợc ổn địnnh ttự đđộn
ng ttheo ggiá ttrị cài đặặt trrướớc. - CCác thhông ssố ccôn
ng nnghhệ vvà trạạng tháái ccủaa thhiếtt bịị đưượcc lưưu trữ troongg th hiếtt bịị đđiều u khhiển trunng ttâm m dưới dạạngg w webSerrver. K
Khii đưượcc k ết nnốii interrnett, d dữ lliệuu đđo đ đạcc vàà trạngg th
hái củủa hhệ tthố ng sẽ dễ dààngg đưượcc giiám
m sáát từ xxa ttại nhàà đ điềuu hhành
h, hhoặặc tại SSở Tài ngguyyên n môi ttrường g củủa Thànhh phố.. Tron ng các nnội du
ung saau đđâyy, ttự đđộnng hóaa quy trìnhh cô ôngg nghệệ X XLN NT đưượcc nh hóm m táác g
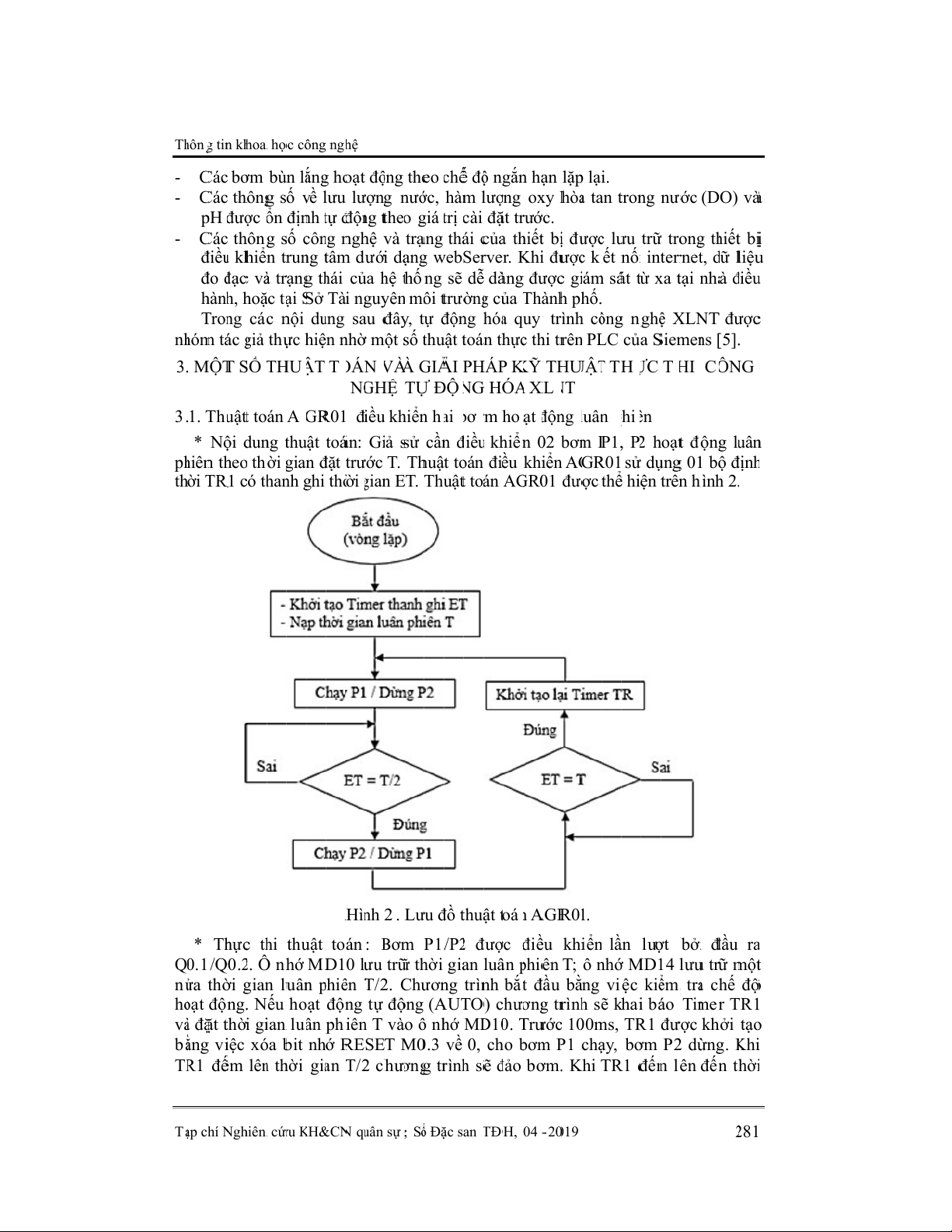
giả thựực hhiệện nnhờờ một ssố tthuuật ttoán thhựcc thhi trrên n PL LC của SSiem men ns [[5].. 3.. M MỘTT S SỐ TH HUẬT TOÁN VÀÀ G GIẢ ẢI PH HÁP P KKỸ TH HU UẬT T THỰC T HI CÔN NG NG GH HỆ TỰ Ự Đ ĐỘNG G HÓA A X XLNT 3.1. T Thuậtt toán A GR
R011 điềuu khhiểnn hai bơơm ho ạt độnng luân phiên
* Nộội ddunng tthuật toáán: Giiả ssử cầnn điều u khhiển 002 bơm
m PP1,, P2 hhoạtt độngg lu uânn ph hiênn thheo
o thời gian đđặt trưước T. Thhuật tooán điều khiiển AG GR
R01 sửử dụụngg 011 bộộ đđịnh h thời T
TR1 ccó thannh gghi thờời g giann E ET. Thuậtt toán AG
GR001 đượợc thểể hiện trênn hìnhh 2. Hìn
nh 2 . Lưu đđồ tthuậật toán A AGRR01.
* Thhựcc thhi thuuật toán : B Bơm m P1/P2 2 đượ
ợc điềều khiiển lầần lượợt bởi đđầu raa Q0.1/Q0.2 2. Ô
Ô nhớ MD10 lưu trữữ thhời giaan luâân p phiêên T; ô nnhớớ M MD114 lưuu trữ m mộtt nử ửa thờời giann luuânn p phiêên T/22. C
Chưươnng trìnnh bắt đầu bằng viiệc kiểểm traa chế độộ ho oạt động.. N
Nếu hoạt động tự độộng (A AUT TO) chươngg trrìnhh sẽ k khaii bááo Tim mer T TR1
vàà đặặt tthời giian luân ph iênn T vào ôô nhhớ MD D10. Trưướcc 1000m ms, TR R1 đưược khhởi tạoo
bằằngg viiệc xóóa bit nhớ R RESET M M00.3 về 0, cho bbơm
m P1 chạạy, bơơm P22 dừừngg. K Khii TR R1 đếếm lên n thhời giaan T/22 chươ
ơngg trrìnhh sẽẽ đảo bơơm.. Khi TR R1 đđếm m lên đến thờii
Tạp chí Nghiên cứ u KH&CN quân sự , Số Đặc san TĐ H, 04 - 2019 2 281
Kỹ thuật điều khi ển & Điện tử
gian T, chương trình sẽ đặt ô nhhớ R
RESET llên 1 để khởi ttạo lạii Timer, sau đó ttiếp p
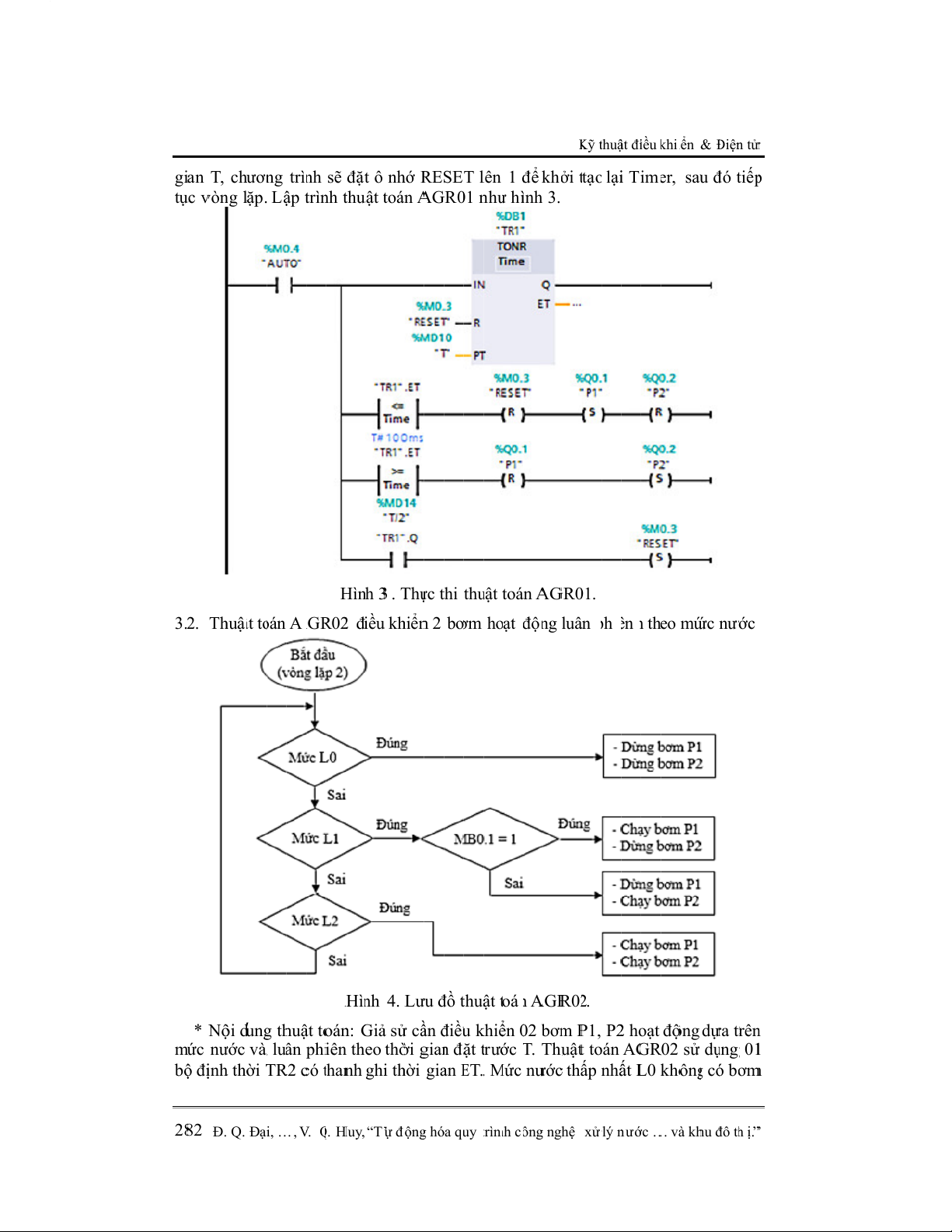
tục vvòng lặp. Lậập ttrìnnh tthuật ttoán A AGR001 nnhư ư hìình 3. H Hìn nh 33 . T Thự ực tthi thu uật toáán A AG GR001. 3.2. Thhuậật to oán AAGR
R022 điềuu khhiểnn 2 bơơm hoạt động luâân ph ênn theo mứức nước Hìn
nh 4. Lưu đđồ tthuậật toán A AGRR02 2.
* Nộội dungg thhuậật tooánn: G
Giảả sửử cầần đđiều kkhiểển 002 bơm
m PP1, P22 hooạt độộng dựựa trênn mức nư
ước và luân phiiênn theo thờời ggian
n đặt ttrướớc T. Thuậtt tooán AG GR02 sử dụ ụng 011 bộộ địịnh thời T
TR2 ccó tthannh ghii thhời giaan E ET.. M
Mức nưước thấấp nhấất L L0 khôông g cóó bơm m 2882 Đ
. Q. Đại, …, V. Q. Huy,“Tự động hóa quy trìn h công nghệ xử lý nước … và khu đô th ị.”
Thông tin kh oa học công nghệ
nàào hhoạạt đđộng, mứức nướớc ttrunng bìn nh L L1 sẽ cóó một bơm m hhoạạt đđộnng, mứ ức nướớc ccaoo L2 2 sẽẽ có cả 22 bơ ơm cùùngg ho oạt động.. Trronng A AG
GR002 ccó 2 vvòng lặp. Vòòng g lặặp 11 thhựcc hiện nhhiệm m v vụ nnhư ư trrong A
AGR001, khác ở cchỗỗ thhay vì điềều khiểnn bơ ơm P1/P2 trựcc
tiếếp thì vòòng lặặp n
nàyy thhực hiiện bậật m mộtt bíít nnhớ M
MB00.1 lênn 1, xxóa bítt nhớ M0.22 xu uốnng 00 kkhi bơm P1 ch hạy/bơ
ơm P22 dừừngg và nngưược lại. V
Vònng lặpp 2 kiểểm traa m mứcc nư ướcc ch
ho pphéép vvà rra qquyyết địnnh đđiềuu khiểển b bơm
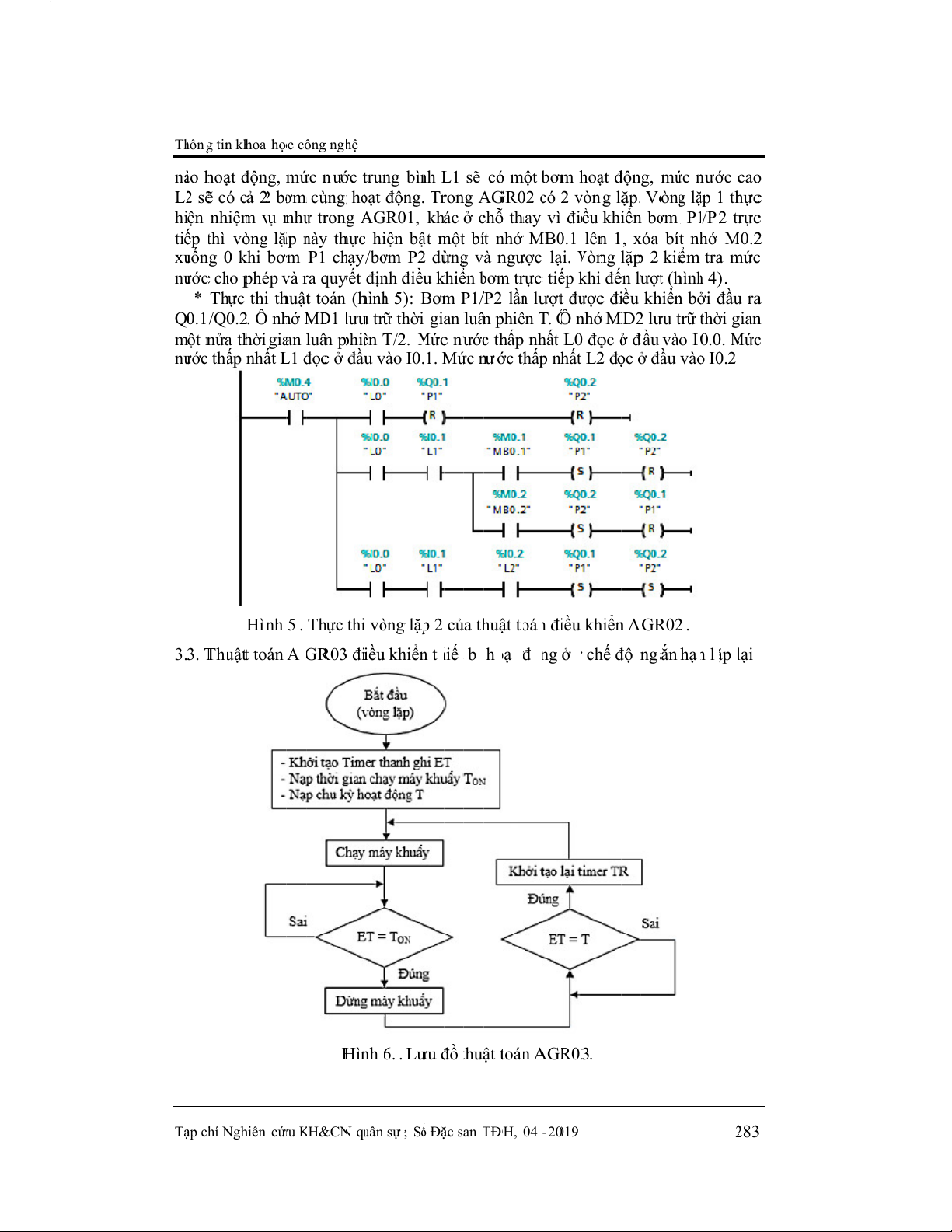
m trrựcc tiếếp kkhi đến lượtt (hhình h 4)). * Th
hực thii thhuật tooán (hhình h 5)): B Bơm m P P1//P2 lần n lưượtt đư
ượcc điiều khhiểnn bởởi đđầuu raa Q0.1/Q00.2. Ô Ô nhhớ M MD D1 lưuu trữ
ữ thhời giaan luân pphiêên T. Ô Ô nnhớ ớ M
MD22 lưưu ttrữ thờời ggiann
một nnửaa thhời giaan lluân pphiê ên T T/22. M
Mứcc nướcc thhấpp nhhất L00 đọọc ở ở đầu vàoo I0.00. M Mứcc nư ước thấp nhấất L
L1 đđọcc ở đầuu vào I0..1. M
Mứức nư ớớc thấpp nhhất L2 đọọc ởở đầu vàoo I00.2
Hình 5 . Thực thii vòòng lặp 2 củủa thuậật toán điều khhiểnn A AGR R022 . 3.3. TThuậtt toán A GR
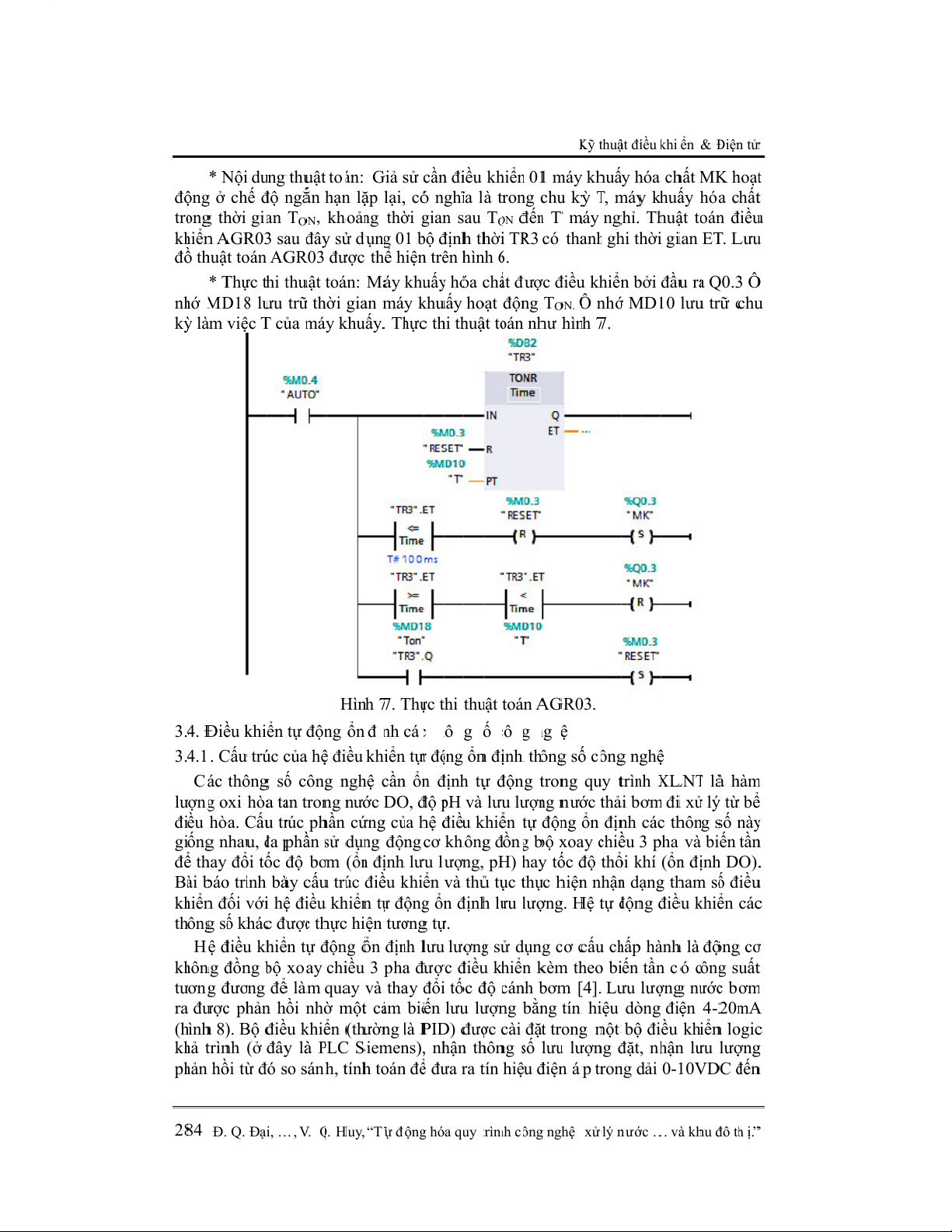
R033 điiềuu khhiểnn thiết b hoạ đ ng ở ở chhế đđộ ngắắn hạn lặp lại H
Hìnnh 6. . Lưưu đđồ tthuật ttoán A AGR033.
Tạp chí Nghiên cứ u KH&CN quân sự , Số Đặc san TĐ H, 04 - 2019 2 2833
Kỹ thuật điều khi ển & Điện tử * N Nội du
ung thuuật toán: Giả ssử cầnn điiều khhiển n 011 m
máyy khhuấấy hhóa chhất MK K hhoạtt
độộngg ở chế đđộ nngắắn hạnn lặặp lại,, cóó nghĩĩa llà tronng cchuu kỳỳ T, m
máyy khuấấy hóa cchấtt tro ongg thhời gian TON, khoản
ng thờời ggiann sau TON đđến
n T máy ngghỉ. Thhuậật toánn đđiềuu kh hiểnn A AGR
R033 saau đâyy sửử dụng 01 bbộ đđịnhh thhờii TR R3 có thaanh h ghhi thờii giian ET T. LLưuu đồồ thhuật tooán AG GR
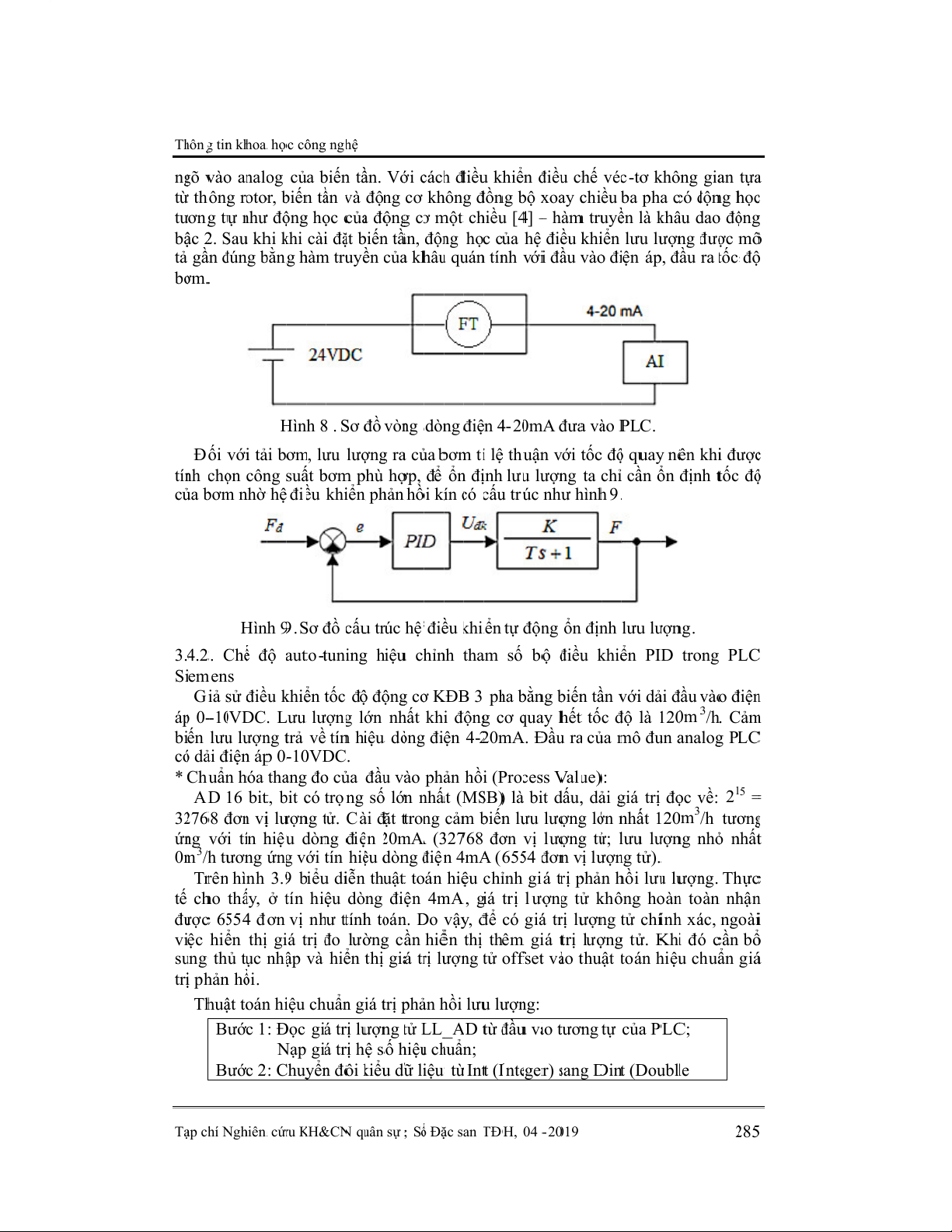
R03 đưược thể hiệnn trêên hhìnnh 6 6. * T Thự
ực thi tthuuật toáán: Mááy khuuấy
y hóóa cchấất đđượợc đđiềuu khhiển bbởi đầuu raa Q Q0.33 Ô Ô nh hớ MD D188 lưưu trữ ữ thhời giaan m
máy kkhuuấy hooạt độnng TON. Ô Ô nnhớ ớ M MD10 lưuu trrữ cchuu
kỳỳ lààm việệc T củủa máy kkhuấy. Th hựcc thhi thhuậật to oánn nhhư hìn nh 77. H Hìn nh 77. T Thự ực tthi thu uật toáán A AG GR003. 3.4. Đ
Điềều kkhiển tự động ổn đ nh các hông ố cô g ng ệ 3.4.1. C
Cấu trúúc ccủaa hệệ điiều khiểnn tựự độ
ộng ổnn địịnhh thôngg sốố côngg nghệệ
Các thôôngg sốố công nnghhệ ccầnn ổnn đđịnhh tựự đđộnng ttronng quy ttrìn nh X XLLNT T làà hhàm m
lượng ooxi hòaa taan ttronng nnướớc DO O, đđộ p pH và lưuu lưượn ng nnướớc tthảải bơm m đii xử ử lýý từừ bểể điều hòa. C
Cấuu trrúc phhần cứứngg củ
ủa hhệ đđiều kkhiểển tự độnng ổn địnnh cácc thhôn ng ssố nnày y giốngg nnhauu, đ đa pphầần ssử dụn
ng độnng cơ khhôngg đồng bbộ xxoaay cchiềều 3 ppha vàà biến tầnn
đểể thhay đổổi tốốc độ bơm (ổn n địịnh lưu lượng, pH
H) hayy tốốc đđộ thổổi kkhí (ổnn địnhh DO)..
Bàài bbáoo trìình bàày ccấuu trú
úc điềều khiển và thủủ tụục tthự ực hhiệnn nhận n dạngg thham m số ố đđiềuu kh
hiểnn đối vớii hệệ điiều khhiểnn tự
ự độngg ổn đđịnhh lư ưu lượợngg. H Hệ ttự đ
độnng đđiềều kkhiểển cácc thôngg số ố khácc được c thhựcc hiện tươ ơngg tự ự.
Hệ đđiềuu khhiển tự đđộnng ổổn địn nh llưu lượng
g sửử ddụng cơ ccấuu ch
hấpp hàànhh là độộng cơ ơ kh hônng đđồnng b
bộ xoay chiiều 3 phaa được đđiềuu kh hiển kkèm
m thheoo biiến tầnn c ó công suấtt tương đđươ
ơng đểể lààm quaay và thaay đổii tốốc đđộ ccánnh bbơm m [[4]. Lưưu lượ ợngg nư ướcc bơm m
ra đưượcc phhảnn hồi nhờờ m
mộtt cảảm biếến lưuu lưượnng bằnng tín hiiệu dòòng điện 4-220m mA A (hìnhh 8)). B
Bộ đđiều kkhiểển ((thườnng là PPID D) đđượ ợc ccài đặt trrongg m
một bộộ điều khiểnn loogicc kh
hả ttrìnnh (ở đâyy làà P PLC C SSiem
menns),, nhhậnn thhônng ssố llưu
u lưượnng đđặt,, nhậnn lư ưu lượợngg ph
hản hồồi từừ đđó sso ssánh, ttínhh tooánn đểể đư
ưa rra ttín hiệệu đđiệnn á p trronng ddải 0-110V VDC đ đếnn 2884 Đ
. Q. Đại, …, V. Q. Huy,“Tự động hóa quy trìn h công nghệ xử lý nước … và khu đô th ị.”
Thông tin kh oa học công nghệ ng gõ vvàoo an
nalog của bbiếnn tầần. Vớới ccách đđiềuu khiểển đđiềuu chế véc-tơơ kkhôông giaan tựaa
từừ thôngg rotor, bbiếnn tầần và độn
ng cơ khhông đđồnng bbộ xxoaay cchiều ba pha ccó đ độnng hhọcc tương tựự n
nhưư độộngg họọc ccủaa độộngg cơ m mộtt chhiềuu [44] – hàm
m truuyềền llà kkhââu ddaoo độộngg bậậc 22. S Sauu khhi k
khi càii đặặt bbiếnn tầần, độn
ng học của hệ điềều khiiển lưuu lưượnng đượ ợc môô tả gầần đ đúnng bbằng hhàm m truyềền củaa khhâu
u quuánn tínnh vớii đầầu vvàoo điiện ápp, đầầu ra ttốc độộ bơ ơm.. H Hìnnh 88 . S Sơ đđồ vòn ng dònng điệện 44-20 0mA đđưaa vàào PPLC. Đối vớii tải bơm
m, lưưu lượợngg raa củủa bbơm
m tỉỉ lệệ thuậnn với ttốcc độ
ộ quuayy nêên khii đưượcc tín
nh chọọn cônng suấất bbơm
m pphù hợợp, để ổnn địịnh lưu lưượnng ta chỉỉ cầần ổổn địnnh ttốc độ ộ củủa bbơm
m nnhờ hệ điều khiiển phhản hồồi kín ccó cấuu trúc như hhìnhh 9. H Hìnnh 99. S
Sơ đđồ cấuu trrúc hệ điềều khiiển tự động ổn địnnh lưuu lư ượnng. 3.4.22. C
Chếế đđộ autto-ttuningg h
hiệuu chỉnnh thaam số bộộ đ
điềuu kkhiểển PID troong PLC C Siemens
Giả ssử điềều kkhiểển ttốc độộ độộngg cơ ơ K KĐB B 3 ph
ha bbằnng bbiếnn tầần vvớii dảải đđầu vàoo đđiệnn áp p 0--10 0VD DC. L
Lưu lưượng lớn nhhất khi độngg ccơ q
quaay hhết tốc đđộ llà 11200m 3/h. C Cảm m
biến lưuu lưượnng ttrả về tínn hiiệu dò òngg điện 4-220m mA A. Đ Đầuu raa củủa m mô đuun aanaalogg PLC C có
ó dảải đđiệnn ápp 0-100VD DC C.
* Chuẩnn hóa thaangg đoo củủa đầuu vào phản hồi (P Processs Value)):
AD 16 bitt, bbit ccó trọ ng số lớn nnhấất (MS
SB)) làà biit ddấu,, dảải ggiá trị đọọc vvề: 215 = = 32 27668 đđơn
n vịị lưượnng ttử. Càài đặt ttron ng cảm
m bbiếnn lưưu lượợngg lớ
ớn nnhấất 11200m3/h tươơng g ứn
ng với tíín hhiệu ddònng điện 2 20m mA
A (3327768 đơơn vị lượợngg tử ử; llưuu lư ượnng nnhỏỏ nnhấtt 0m m3/h tưươnng ứng
g với tín hiệệu ddònng đ điện 44mA A (655
54 đơnn vị lưượnng ttử).. Trrên
n hình 3.9 biểuu diiễn thuậtt tooán hiệệu chỉỉnh giá trị pphản hhồi lưu u lưượnng. Thhựcc
tế chho thấấy, ở ttín hiệệu dòng điện 4m mA, giá trị l ượng
g tử kkhôông hooànn tooànn nhhậnn đư ượcc 65 5544 đơn vị nh hư ttínhh to oánn. D
Do vậyy, đđể có giáá trrị lưượnng tử chíínhh xáác, ngoàii
việc hiểển thị giiá trị đ
đo lườờngg cần hiểển thị thêm
m giiá ttrị lượợngg tửử. K Khii đóó ccần bổổ su
ung thủ tục nhập và hiểển thị giáá trrị lưượnng tử offfsett vàào thuuật toáán hhiệuu chuẩẩn giáá trịị phhảnn hồ ồi.
Thhuậật tooánn hiiệu chhuẩnn giá ttrị pphảản hhồi lưuu lưượnng: Bước 1: Đ
Đọc giá trrị lưượnng tử L LL__AD ttừ đ đầuu và ào ttương tự củaa PPLC C; N
Nạp giá trrị hệ ssố hhiệu u ch huẩẩn; Bước 2: C Chuyểnn đôôi k
kiểuu dữ liiệu từIntt (Inte egerr) ssang D Dint (D Douublle
Tạp chí Nghiên cứ u KH&CN quân sự , Số Đặc san TĐ H, 04 - 2019 2 2855
Kỹ thuật điều khi ển & Điện tử In nteggerr); B Bỏ đ đi g giá trị lưượn ng tử offfsett (g
giá trịị lưượnng ttử ứngg vvới dòng đii ện phản n hồi 44mA);; Bước 3: C Chuyểnn đổổi k
kiểuu dữ liiệu từDIInt san ng Real ; Bước 4: N Nhân ggiá trị lượ ợngg tửử vớới h
hệ ssố hhiệuu chuẩẩn; Bước 5: H
Hiểnn thhị ggiá trị lưuu lưượnng ((giáá trị đo lưườnng); Bước 6: Q Quay vvề B B ướớc 1 1;
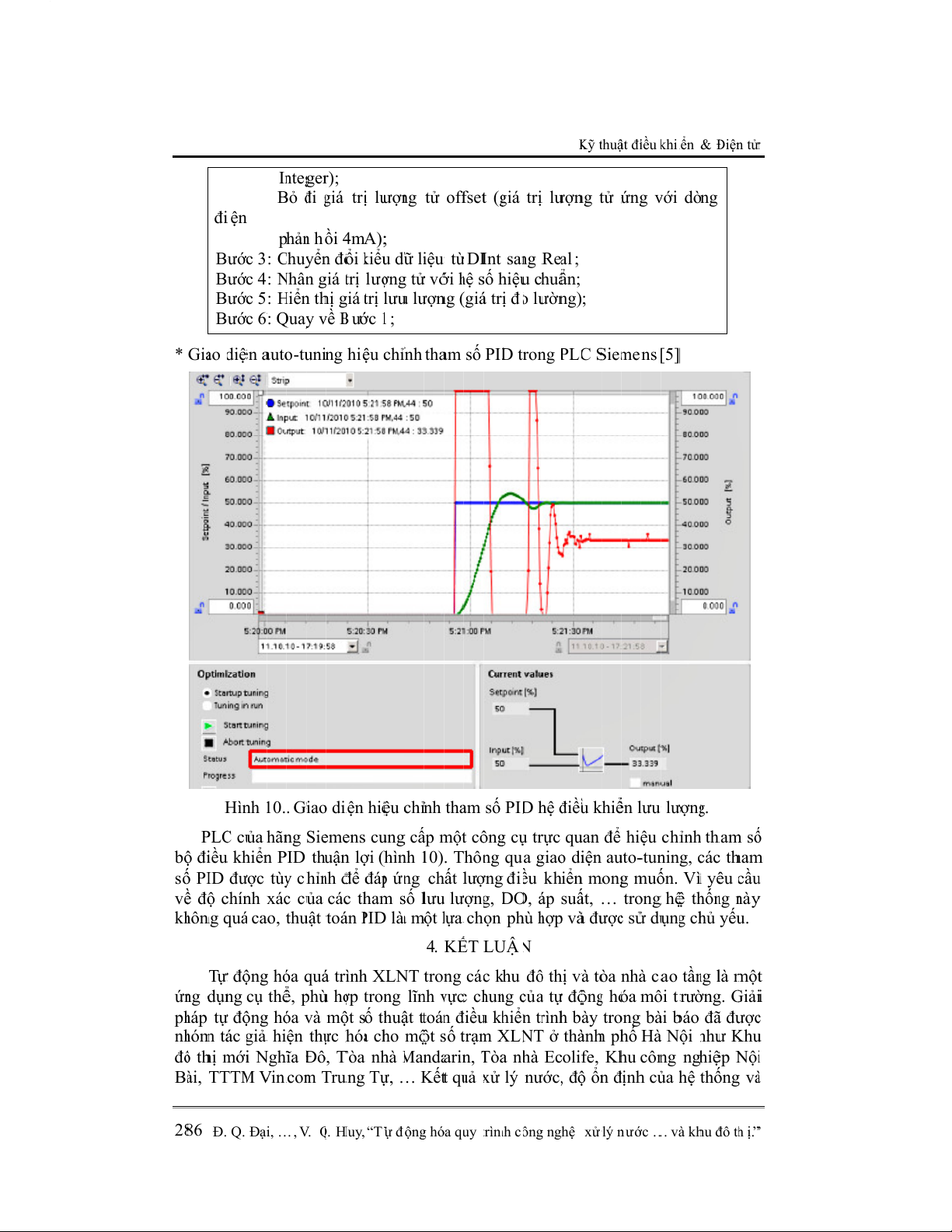
* Giaao diệện aautoo-tuuning hiệệu cchỉnh thaam số PID tronng PLC SSiemens [5]] H
Hìnnh 10.. Giaoo diiện hiệệu cchỉnh thaam số PID hhệ đđiều kkhiểển llưu lượng g. P PLC
C củủa hãnng Sieemeenss cuung cấấp m
mộtt côôngg cụụ trrực quuan để hiệu chỉỉnh h tham m sốố
bộộ điiều khhiểnn PID thu
uậnn lợợi (hìnnh 110). T
Thông quua ggiaoo diiệnn auuto--tunning, ccácc thham m sốố PIID được tùy y c hỉn nh đđể đáp
p ứng chất lượợng điều khiểnn mongg m
muốốn. Vìì yêêu cầuu
vềề độộ cchínnh xácc củủa cácc thham m ssố llưu lưượng, DO
O, ááp suấất, … troong hệệ thhốn ng n nàyy kh
hônng qquáá caao, thuuật toáán P PID
D làà một llựa chọn phhù h
hợpp vàà đưượcc sửử dụụng g chhủ yếuu. 4. KẾ ẾT LU UẬN
Tự độộngg hóóa qquáá trìnhh XLN
NT trong các khu đôô thhị và tòòa nhàà cao tần ng llà m mộtt ứn
ng dụnng cụ thểể, pphùù hợ ợp trong lĩnnh v vựcc ch hun ng ccủaa tự ự độộng
g hóóa môôi t rườờngg. G Giảii ph
hápp tựự độộngg hóóa vvà mộột số thuậật ttoán n đđiềuu kh
hiển trrìnhh bày troongg bàài bbáo đãã đưượcc nh hóm m táác giảả hiện thự ực hóa a chho mộột số ttrạm m X XLNT
T ở thàànhh phhố Hàà Nội nhưư K Khuu đô ô thhị m mớii N Nghĩa Đôô, TTòa nhhà M Mandaarinn, T
Tòaa nhà Eccolife, Khhu cônng nghiệệp N Nộii Bàài, TT TTM M Vinncom m Truung Tựự, … … K Kếtt qu
uả xử lý nước,, độộ ổnn đđịnhh củủa hệ thốốngg vàà 2886 Đ
. Q. Đại, …, V. Q. Huy,“Tự động hóa quy trìn h công nghệ xử lý nước … và khu đô th ị.”
Thông tin khoa học công nghệ
chi phí vận hành cho thấy việc ứng dụng công nghệ tự động hóa trong lĩnh vực xử
lý môi trường mang lại hiệu quả thiết thực. Ngoài việc ứng dụng trực tiếp vào hệ tự
động hóa quy trình XLNT, một số thuật toán đề xuất còn có thể được áp dụng để
điều khiển thiết bị điện trong các hệ thống tự động hóa khác. TÀI LIỆU THAM KHẢO
[1]. Quy chuẩn kỹ thuật Quốc gia về nước thải sinh hoạt (2008) - QCVN 14:
2008/BTNMT, Tổng cục môi trường, Bộ Tài nguyên môi trường.
[2]. Trịnh Xuân Lai (2009), “Tính toán thiết kế các công trình xử lý nước thải”, NXB Xây dựng.
[3]. Lâm Minh Triết, Nguyễn Thanh Hùng, Nguyễn Phước Dân (2008), “Xử lý
nước thải đô thị và công nghiệp – Tính toán thiết kế công trình”, Nhà xuất bản
Đại học Quốc gia TP Hồ Chí Minh.
[4]. Đào Hoa Việt (2005), “Phân tích và tổng hợp hệ thống truyền động điện tự
động”, Học viện KTQS.
[5]. Siemens, “Teleservice of a S7-1200 with Telecontrol Server Basic V3 and CP
1242-7 GPRS V2 (Set 33)”, Application example, Entry ID: 56720905, Entry date: 10/26/2016. ABSTRACT
TECHNOLOGY PROCESS AUTOMATION OF WASTE WATER
TREATMENT IN HIGH-RISE BUILDINGS AND URBAN AREAS
The treatment of domestic wastewater in urban areas and high-rise buildings
today is an urgent issue. Wastewater treatment station (WTP) handles all black
and gray water to meet the standards of Ministry of Natural Resources and
Environment (QCVN 14: 2008 / BTNMT) before discharging into the city's
general drainage system. The automated wastewater treatment system will
ensure technological parameter requirements and management and data
monitoring requirements, increasing water treatment efficiency, reducing labor
and operating costs. This paper presents automation solutions and some control
algorithms implemented on Siemens PLC, automating the current process of
wastewater treatment technology.
Keywords: Waste water treatment; Automation; PLC.
Nhận bài ngày 15 tháng 01 năm 2019
Hoàn thiện ngày 22 tháng 02 năm 2019
Chấp nhận đăng ngày 15 tháng 3 năm 2019
Địa chỉ: Viện Tự động hóa KTQS. *Email: maihuyvu@gmail.com.
Tạp chí Nghiên cứu KH&CN quân sự, Số Đặc san TĐH, 04 - 2019 287
Tài liệu liên quan:
-

Đồ án xử lý nước thải Thiết kế hệ thống xử lý nước thải sinh hoạt | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
235 118 -

Báo cáo môn Học: Xử lý Nước Thải Đô Thị | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
123 62 -

Đánh giá hiệu quả xử lý độ màu nước thải dệt nhuộm bằng Chlorella vulgaris | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
102 51 -

Đồ án xử lý nước thải Thiết kế hệ thống xử lý nước thải sinh hoạt | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
237 119 -

Thiết kế Hệ Thống Xử Lý Nước Thải Nhà Máy Giết Mổ Heo | Xử lý nước thải đô thị | Đại học Nông Lâm Thành phố Hồ Chí Minh
123 62