Xe 3 Bánh Điều Khiển Từ Xa Qua Bluetooth - Hướng Dẫn Chi Tiết. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
1. Fritzing (mô phỏng phần cứng)
- Ứng dụng Fritzing là phần mềm Tự động hóa Thiết kế Điện tử giá rẻdễ tiếp cận, phù hợp với nhu cầu của những người chế tạo và người đam mê. Nó cung cấp chế độ xem "bảng mạch" thực tế độc đáo và thư viện linh kiện với nhiều thành phần cấp cao thường dùng. Fritzing giúp bạn dễ dàng trao đổi về mạch điện cũng như biến chúng thành các bố cục PCB sẵn sàng cho sản xuất. Nó đặc biệt phổ biến trong số những người dùng Arduino và Raspberry Pi, và được sử dụng rộng rãi trong giáo dục và sáng tạo.
Xe 3 Bánh Điều Khiển Từ Xa Qua Bluetooth - Hướng Dẫn Chi Tiết. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
Tài liệu gồm 15 trang giúp bạn tham khảo, củng cố kiến thức và ôn tập đạt kết quả cao trong kỳ thi sắp tới. Mời bạn đọc đón xem!
Môn: Lý thuyết điều khiển tự động (UET) 17 tài liệu
Trường: Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội 804 tài liệu
Tác giả:







Preview text:
lOMoAR cPSD| 59735516
Xe 3 bánh điều khiển từ xa qua bluetooth A Giới thiệu chung: I Phần cứng
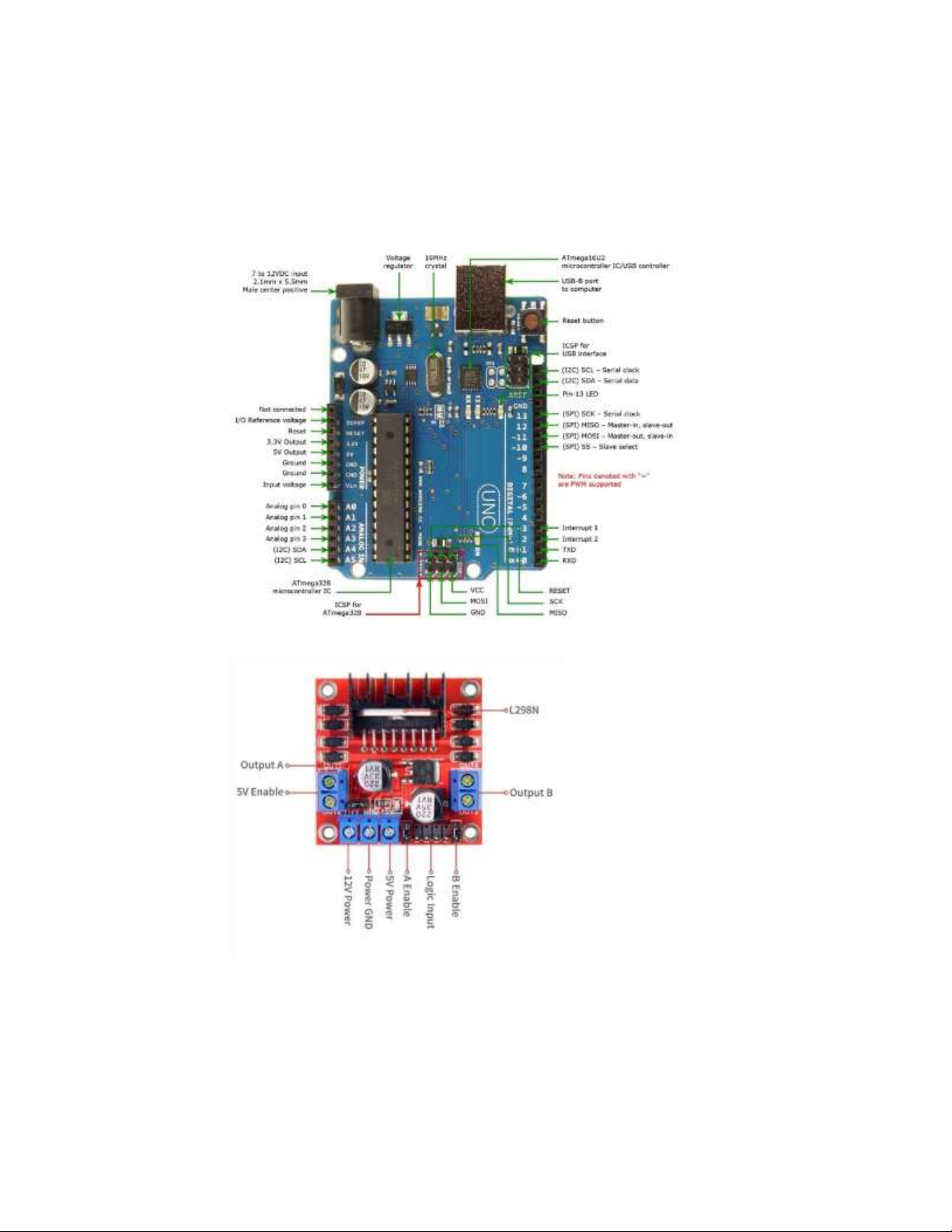
- Arduino Uno R3 chíp cắm Atmega328P
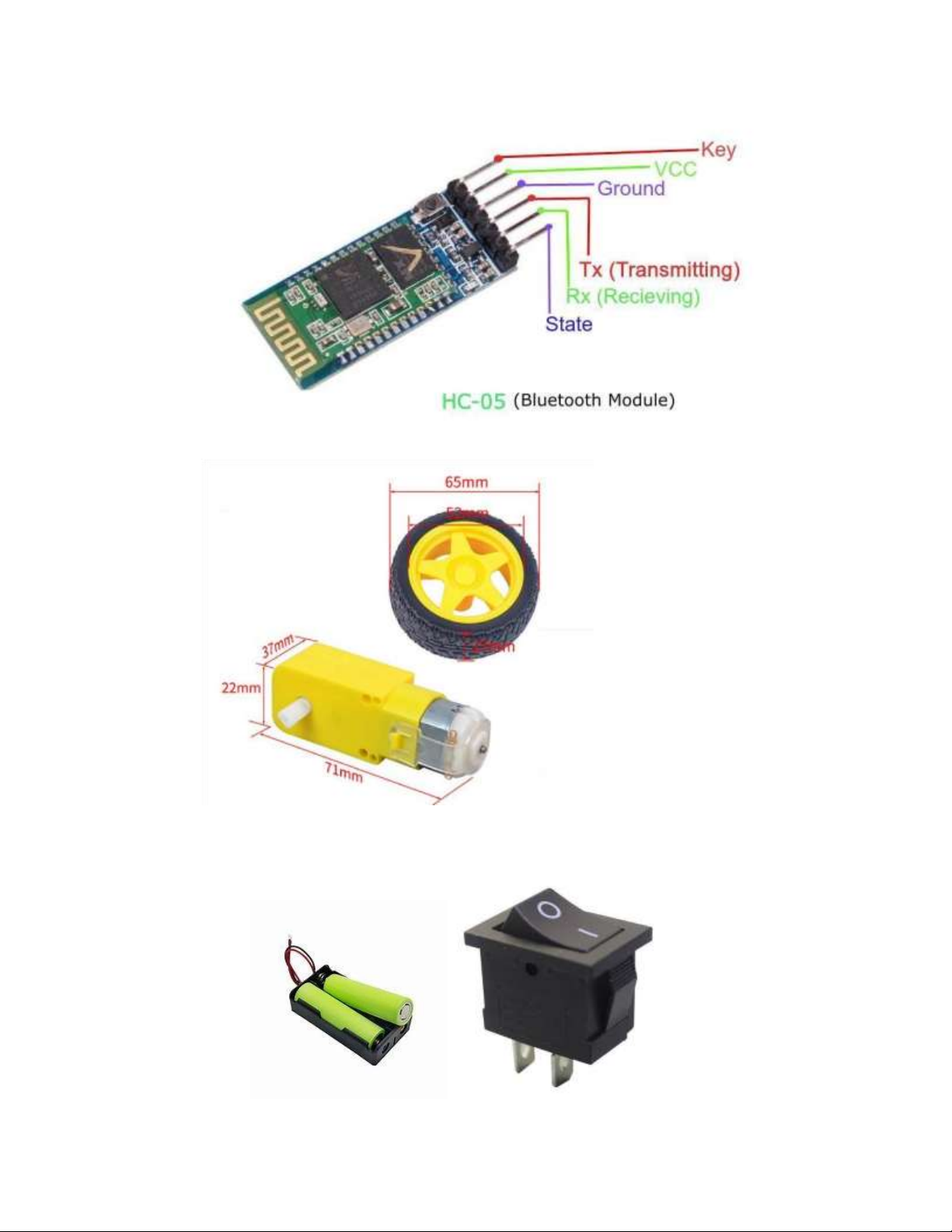
- Module điều khiển động cơ L298N - Module bluetooth HC-05 lOMoAR cPSD| 59735516 - Motor DC 3V-6V và bánh xe
- Nguồn ~ 9V: gồm 2 cell pin 18650 3,7V và công tắc bập bênh 6A 250V 2 chân lOMoAR cPSD| 59735516
- Dây cắm breadboard đực cái - Dây USB type B II Phần mềm
1. Fritzing (mô phỏng phần cứng) -
Ứng dụng Fritzing là phần mềm Tự động hóa Thiết kế
Điện tử giá rẻdễ tiếp cận, phù hợp với nhu cầu của những người chế
tạo và người đam mê. Nó cung cấp chế độ xem "bảng mạch" thực tế
độc đáo và thư viện linh kiện với nhiều thành phần cấp cao thường
dùng. Fritzing giúp bạn dễ dàng trao đổi về mạch điện cũng như biến
chúng thành các bố cục PCB sẵn sàng cho sản xuất. Nó đặc biệt phổ
biến trong số những người dùng Arduino và Raspberry Pi, và được sử
dụng rộng rãi trong giáo dục và sáng tạo. - lOMoAR cPSD| 59735516
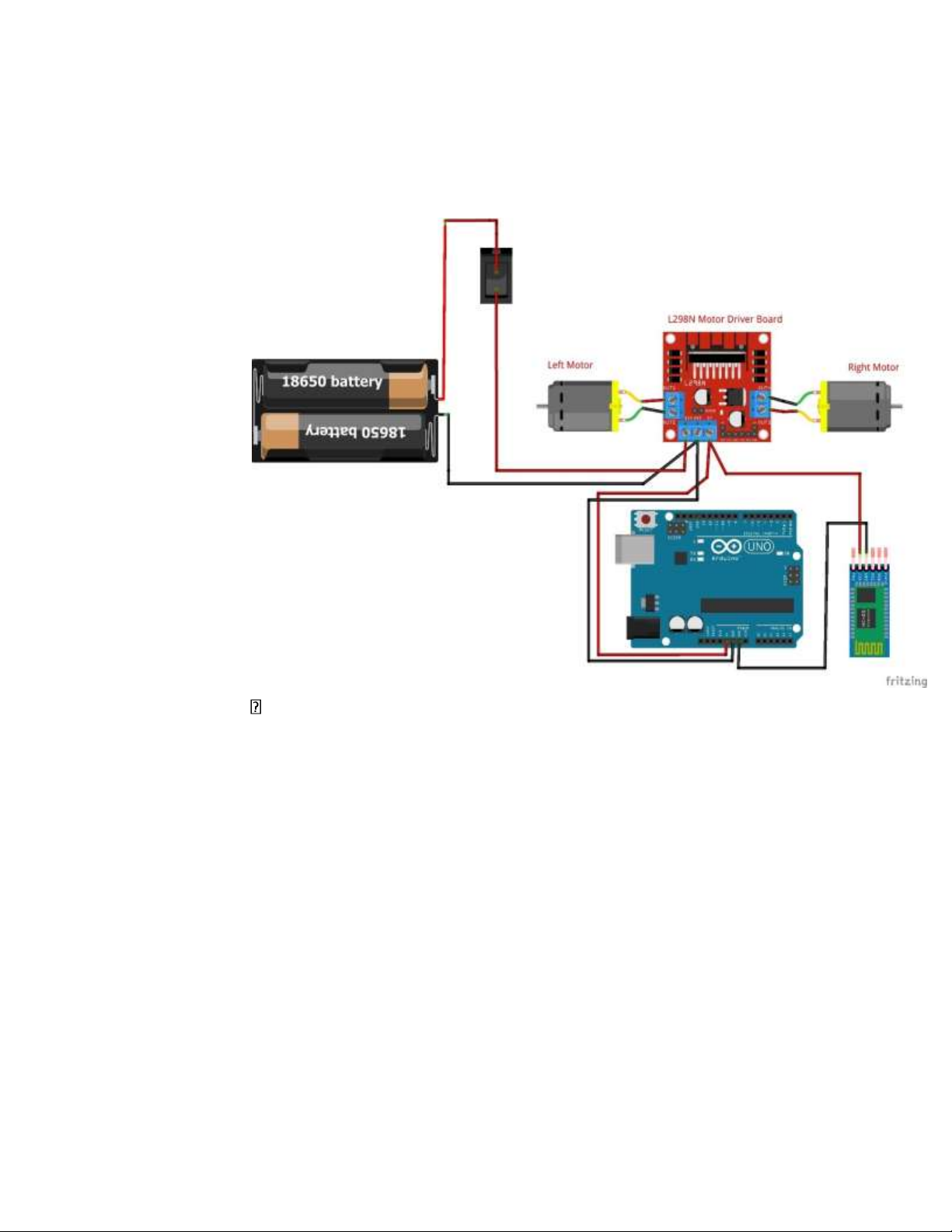
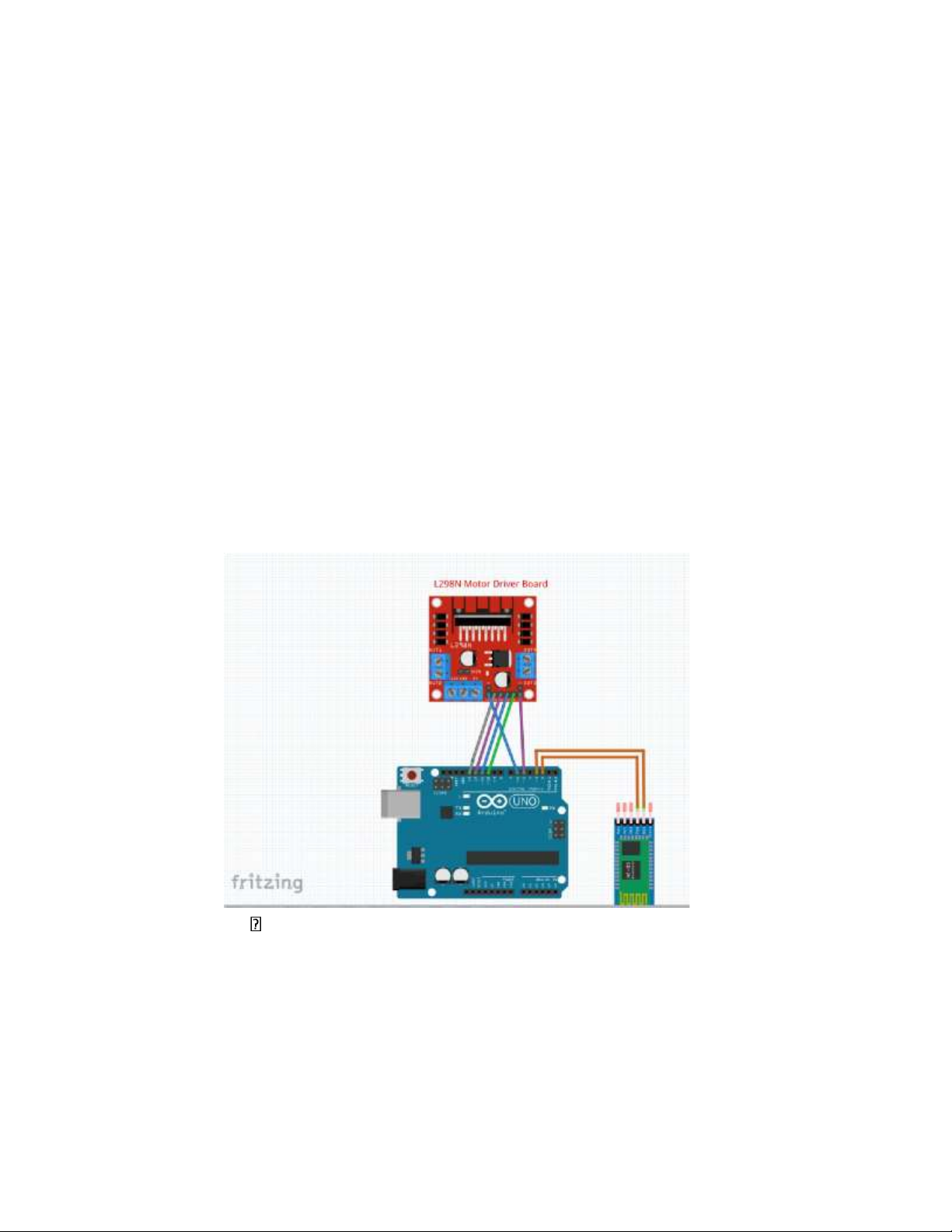
H1.1 Mô phỏng ghép nối phần cứng của hệ thống xe điều khiển trên fritzing
2.Dabble - Ứng dụng điều khiển -
Dabble là một ứng dụng đa năng dành cho điện thoại thông minh,
được thiết kế để điều khiển các bo mạch như Arduino Uno, Mega, Nano, ESP32 và
evive thông qua kết nối Bluetooth. Ứng dụng này biến điện thoại của bạn thành
một thiết bị I/O ảo, cho phép bạn điều khiển phần cứng, giao tiếp với nó và truy
cập các cảm biến tích hợp trên điện thoại như GPS, gia tốc kế, cảm biến tiệm cận
và nhiều tính năng khác. -
Các tính năng chính của Dabble:
+ Điều khiển độ sáng LED: Cho phép điều chỉnh độ sáng của
đèn LED và các chân kỹ thuật số/analog trên bo mạch.
+Terminal: Gửi và nhận các lệnh văn bản và giọng nói qua
Bluetooth, giúp giao tiếp hai chiều giữa điện thoại và bo mạch.
+Gamepad: Biến điện thoại thành bộ điều khiển với các chế độ analog lOMoAR cPSD| 59735516
(Joystick), kỹ thuật số và gia tốc kế, phù hợp cho việc điều khiển
robot hoặc các thiết bị khác.
+Pin State Monitor: Giám sát trạng thái trực tiếp của các chân
trên bo mạch, hỗ trợ việc gỡ lỗi và theo dõi hoạt động của thiết bị.
+Phone Sensor: Truy cập các cảm biến trên điện thoại như gia
tốc kế, con quay hồi chuyển, cảm biến tiệm cận, từ kế, cảm biến ánh
sáng, âm thanh, GPS, nhiệt độ và áp suất, mở ra nhiều khả năng cho
các dự án DIY và ứng dụng IoT.
- Dabble tương thích với các module Bluetooth như HC-05, HC-06,
HM-10 và AT-09, giúp kết nối dễ dàng với các bo mạch vi điều
khiển. Bạn có thể lập trình bo mạch bằng Arduino IDE hoặc sử
dụng các nền tảng lập trình đồ họa như PictoBlox dựa trên Scratch
3.0, giúp việc phát triển dự án trở nên dễ dàng và thân thiện với người mới bắt đầu.
- Ứng dụng Dabble có sẵn trên cả hai nền tảng Android và iOS, bạn
có thể tải về từ Google Play Store và Apple App Store. Với
Dabble, việc tạo ra các dự án DIY, điều khiển robot, hoặc phát
triển các ứng dụng IoT trở nên đơn giản và hiệu quả hơn, tận dụng
tối đa các tính năng của điện thoại thông minh để mở rộng khả
năng của các bo mạch vi điều khiển. 3.Aduino IDE
- Arduino IDE (Integrated Development Environment) là một môi
trường phát triển tích hợp mã nguồn mở, được thiết kế để viết, biên dịch và tải mã
nguồn lên các bo mạch Arduino. Phần mềm này hỗ trợ các hệ điều hành như
Windows, macOS và Linux, cho phép người dùng dễ dàng phát triển các ứng dụng điện tử tương tác.
- Các ưu điểm của Arduino IDE: lOMoAR cPSD| 59735516
+ Giao diện thân thiện: Arduino IDE cung cấp một giao diện đơn
giản, dễ sử dụng, phù hợp cho cả người mới bắt đầu và các lập
trình viên chuyên nghiệp.
+ Hỗ trợ ngôn ngữ C/C++: Phần mềm sử dụng ngôn ngữ lập trình
C/C++, giúp người dùng dễ dàng viết mã và tương tác với phần cứng Arduino.
+ Thư viện phong phú: Arduino IDE tích hợp nhiều thư viện hỗ
trợ, giúp người dùng dễ dàng triển khai các chức năng phức tạp mà
không cần viết lại từ đầu.
+ Hỗ trợ đa nền tảng: Phần mềm tương thích với nhiều hệ điều
hành, bao gồm Windows, macOS và Linux, giúp người dùng linh
hoạt trong việc lựa chọn môi trường làm việc.
+ Cộng đồng lớn: Với một cộng đồng người dùng rộng lớn,
Arduino IDE nhận được sự hỗ trợ mạnh mẽ, cung cấp nhiều tài
liệu, hướng dẫn và giải pháp cho các vấn đề kỹ thuật. lOMoAR cPSD| 59735516 B Sơ đồ và nguyên lý I Sơ đồ phần cứng 1. Sơ đồ nguồn điện
Mô tả sơ đồ nguồn điện:
- Nguồn cấp chính (Pin 18650):
+ Sử dụng 2 pin 18650 để cung cấp năng lượng cho toàn bộ hệ thống.
+ Pin được kết nối qua một công tắc nguồn, cho phép bật/tắt hệ thống dễ dàng.
+Dòng điện từ pin 18650 được cấp đến Motor Driver L298N
thông qua các đầu nối 12V và GND. - Motor Driver L298N:
+ Nhận nguồn điện chính từ pin qua chân +12V và GND.
Chân 5V của L298N được kích hoạt và cấp nguồn điện cho
Arduino Uno qua chân 5V và GND trên bo mạch Arduino.
+ Motor Driver đồng thời cung cấp năng lượng cho hai động cơ DC (trái và phải). lOMoAR cPSD| 59735516 - Động cơ DC:
+ Hai động cơ DC được cấp nguồn từ cổng OUTPUT của L298N. + Cổng OUTPUT bao gồm:
OUT1 & OUT2: Kết nối với động cơ trái.
OUT3 & OUT4: Kết nối với động cơ phải. - Arduino Uno:
+ Nhận nguồn điện 5V từ L298N thông qua chân 5V.
+ Arduino không cấp điện trực tiếp cho động cơ mà chỉ gửi tín
hiệu điều khiển đến L298N. - Bluetooth Module HC-05:
+Module Bluetooth HC-05 lấy nguồn 5V từ L298N qua chân
5V và GND từ Arduino.Điều này đảm bảo module Bluetooth hoạt
động ổn định trong việc truyền tín hiệu. 2. Sơ đồ tín hiệu
Mô tả sơ đồ tín hiệu
- Chân tín hiệu từ Arduino đến motor driver:
+ IN1 (L298N) → Chân số 13 (Arduino): Điều khiển hướng quay động cơ trái.
+IN2 (L298N) → Chân số 12 (Arduino): Điều khiển hướng quay động cơ trái. lOMoAR cPSD| 59735516
+IN3 (L298N) → Chân số 11 (Arduino): Điều khiển hướng quay động cơ phải.
+IN4 (L298N) → Chân số 10 (Arduino): Điều khiển
hướng quay động cơ phải. -
Chân điều chỉnh tốc độ:
+ ENA (L298N) → Chân số 6 (Arduino): PWM điều chỉnh tốc độ động cơ trái.
+ ENB (L298N) → Chân số 5 (Arduino): PWM điều chỉnh tốc độ động cơ phải.
- Chân tín hiệu từ Arduino đến Bluetooth module:
+ TX (HC-05) →Chân số 2: Dữ liệu từ Bluetooth đến Arduino.
+ RX (HC-05) →Chân số 3: Dữ liệu từ Arduino đến Bluetooth.
Nguyên lý hoạt động tín hiệu: - Bluetooth HC-05:
+ Nhận tín hiệu từ ứng dụng điều khiển (như Dabble) qua kết nối không dây.
+ Gửi tín hiệu qua chân TX và nhận tín hiệu phản hồi qua chân RX. - Arduino Uno:
+ Xử lý tín hiệu từ Bluetooth để xác định lệnh điều khiển (tiến,
lùi, rẽ trái, rẽ phải).
+ Gửi tín hiệu điều khiển đến motor driver L298N qua các chân IN1, IN2, IN3, IN4.
+ Điều chỉnh tốc độ động cơ bằng tín hiệu PWM qua các chân ENA và ENB. - Motor Driver L298N:
+ Nhận tín hiệu điều khiển từ Arduino.
+ Thay đổi hướng quay và tốc độ của các động cơ DC tương
ứng để thực hiện lệnh.
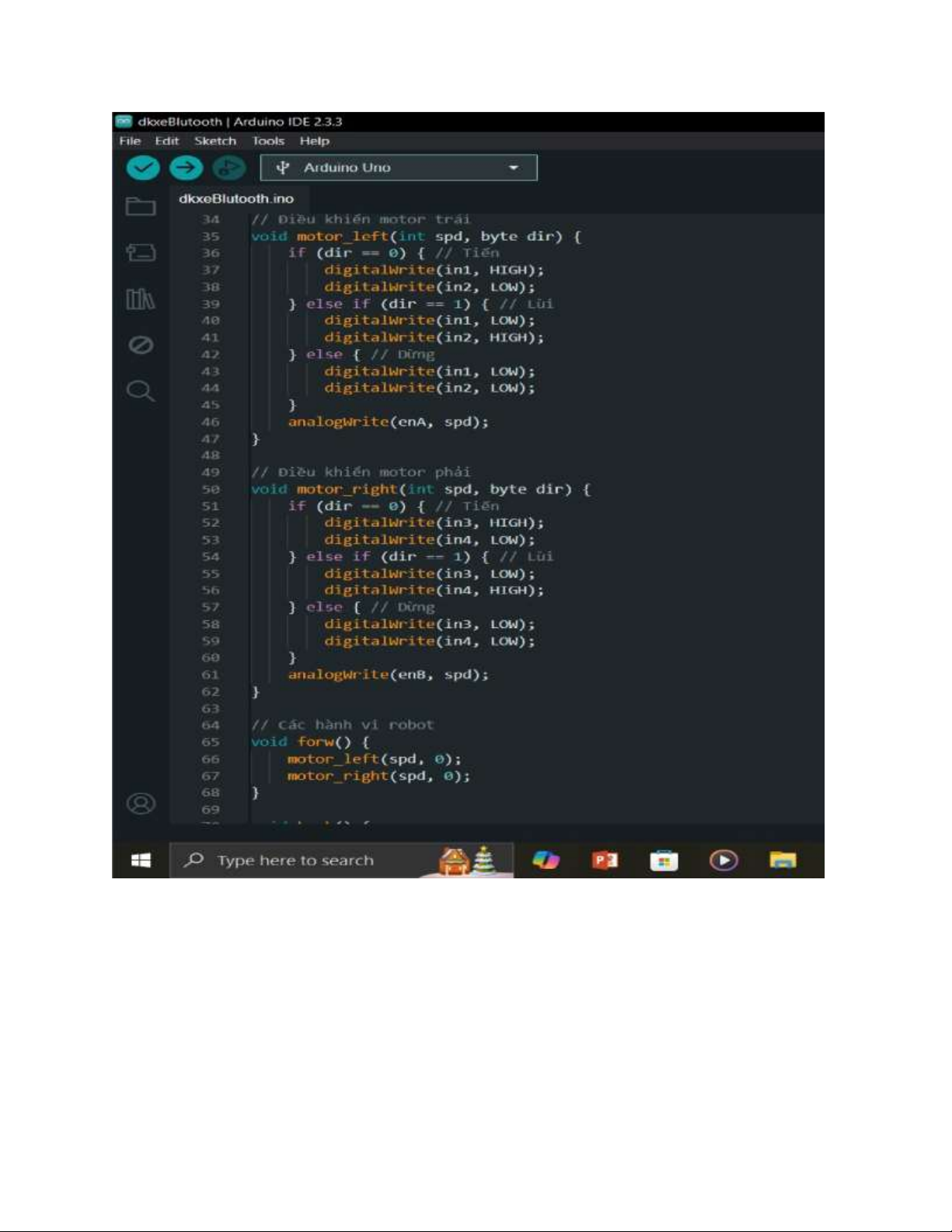
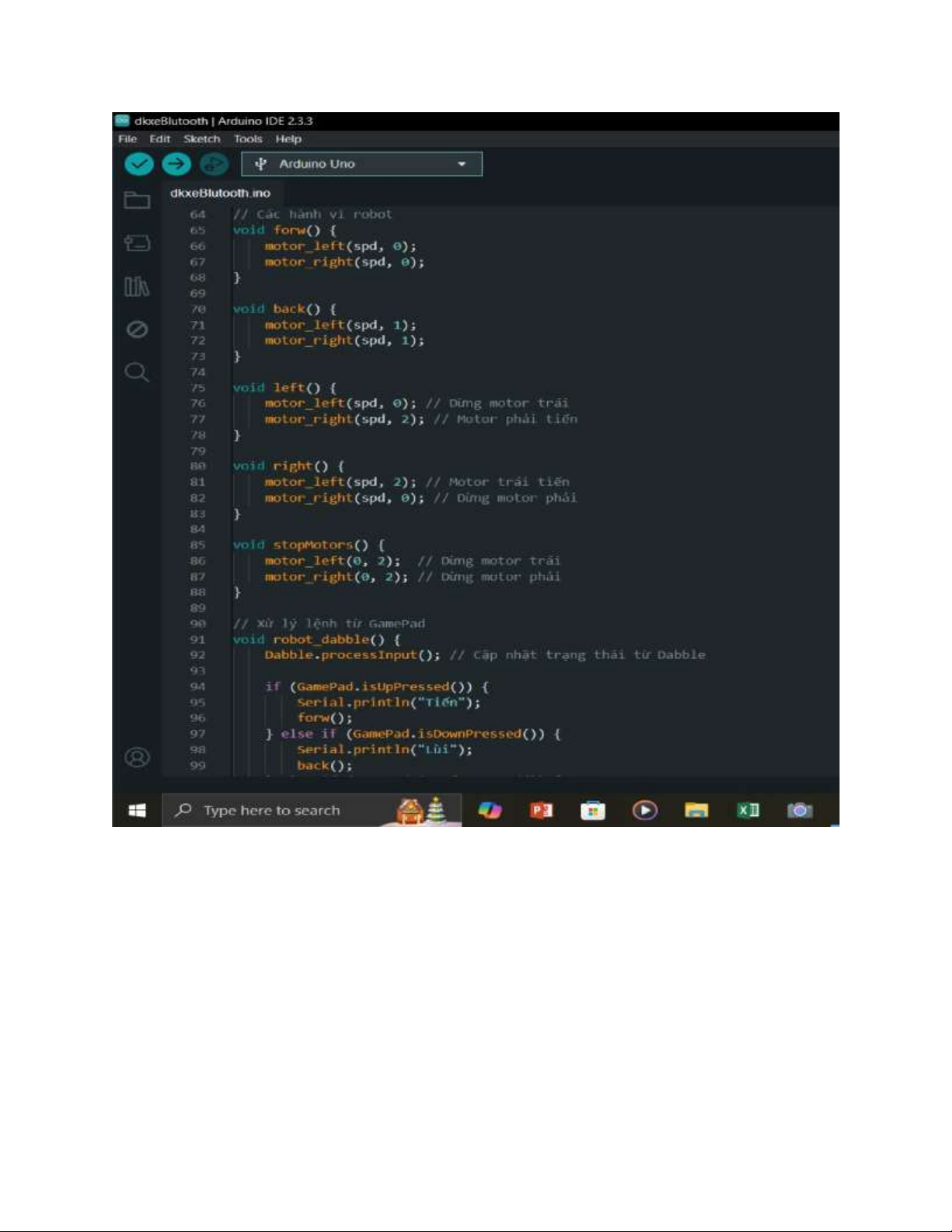
II Nguyên lý hoạt động của hệ thống(sơ đồ phần mềm) Code trên Arduino IDE: lOMoAR cPSD| 59735516 lOMoAR cPSD| 59735516 lOMoAR cPSD| 59735516 lOMoAR cPSD| 59735516
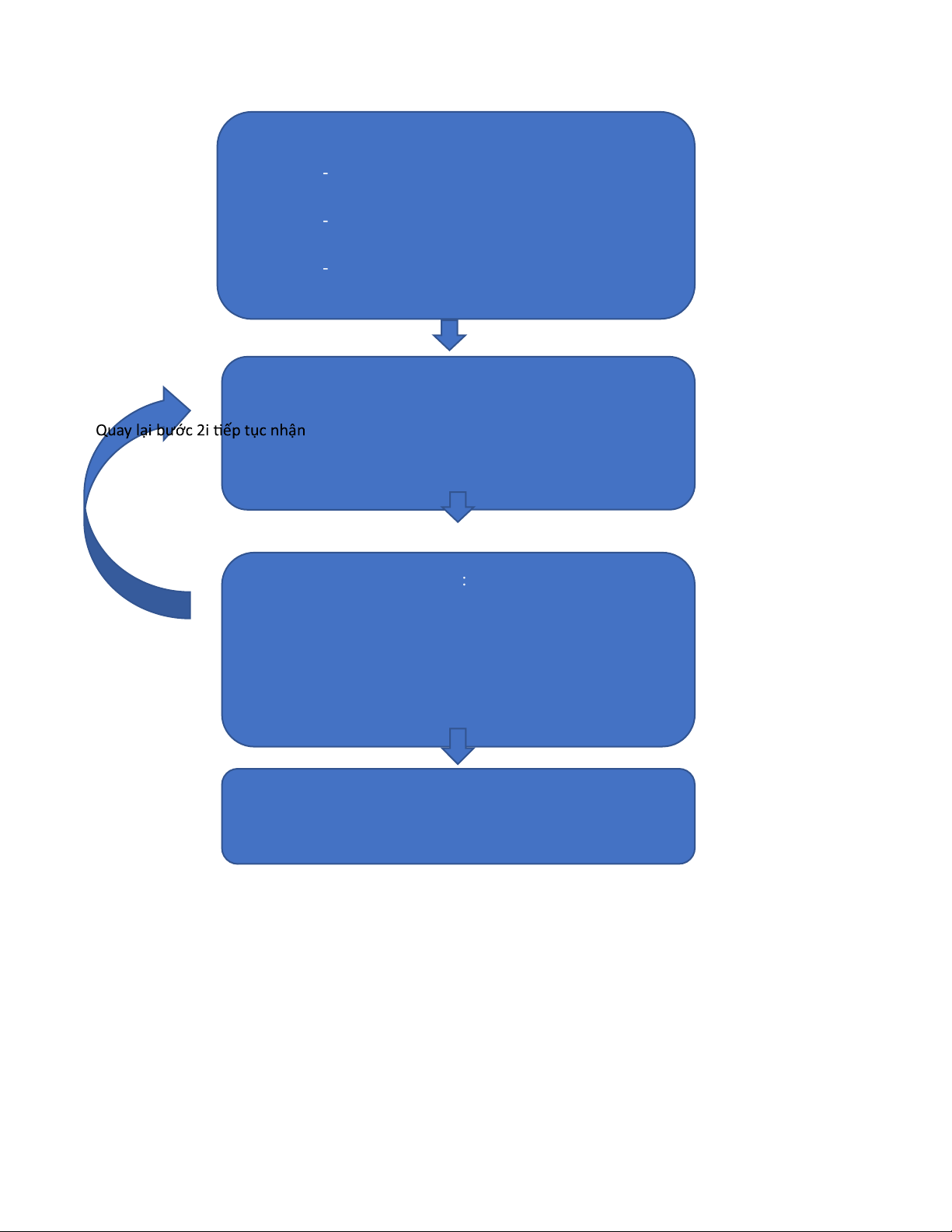
Sơ đồ nguyên lý hoạt động lOMoAR cPSD| 59735516 1. Khởi tạo hệ thống:
Khởi tạo các chân điều khiển động cơ ( IN , IN 1 2, IN 3, IN 4, ENA, ENB )
Thiết lập giao tiếp Bluetooth qua SoftwareSerial
Khởi tạo thư viện Dabble và kết nối GamePad Module
2 . Kiểm tra tín hiệu từ GamePad : lệnh
Ví dụ: - Lệnh “Up”: xe tiến lên .
3 Thực hiện lệnh điều khiển :
- Xuất tín hiệu đến L298N để điều khiển động cơ theo lệnh.
- Nếu cần điều chỉnh tốc độ và hướng, áp dụng giá trị PWM phù hợp. END
C Lắp ráp và thử nghiệm I Lắp giáp lOMoAR cPSD| 59735516
- Khung xe được đặt sẵn trên mạng nên bỏ qua được bước gia công tạo hình cho khung
- Đằng trước được lắp bánh đa hướng giúp cho xe chuyển động dễ dàng hơn
- Hàn dây nguồn dương với công tắc trước rồi mới hàn đến dây vào motor
- Dùng băng dính hai mặt cố định nguồn ,arduino và motor driver
Kết nối dây nguồn và cắm các dây tín hiệu như 2 sơ đồ ở phần trên
II Nạp code và chạy thử kiểm tra lỗi Video1:
- Lúc đầu do cố định nguồn ở đuôi xe nên xe xuất hiện tình trạng rung lắc ở đuôi
- Code cũng xuất hiện vấn đề khiến cho việc rẽ trái phải lẫn lộn Video2:
- Sau khi cố định lại nguồn lên giữa xe mặt dưới và sửa lại tín hiệu
ra của động cơ xe đã chạy đúng như mong đợi D Hướng phát triển thêm cho tương lai -
Tài liệu liên quan:
-

Bài 12 - Ví dụ về Mô phỏng SIMULINK và Tín hiệu trong Hệ thống. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
74 37 -

Bài tập tuần 1 - Môn Kỹ thuật điều khiển hệ thống. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
63 32 -

Bai9ltdktd - giải bài tập. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
66 33 -

Btvntuan 3 - Đáp án Bài Tập Lý Thuyết Điều Khiển TD 2023. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
68 34 -

Bài tập LTĐK Tuần 13: Phân Tích Hệ Thống và Biểu Đồ Bode. Môn Lý thuyết điều khiển tự động (UET) | Trường Đại học Công nghệ, Đại học Quốc gia Hà Nội.
68 34