Bài báo cáo môn Hệ thống truyền động Servo đề tài "Matlab Simulation and PID Algorithm Servo Control"
Bài báo cáo môn Hệ thống truyền động Servo đề tài "Matlab Simulation and PID Algorithm Servo Control" của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:




Preview text:
lOMoARcPSD| 37054152
Ministry of Education and Training
HCMC University of Technology and Educatiton
Faculty of HighQuality Training Mechatronics Department COURSE REPORT
Subject: Drive Servo System
MATLAB SIMULATION AND PID ALGORITHM OF SERVO CONTROL Index
1. Simulation of 3 levels of velcoity for NL= 5 and NL=7 ................................................... 6
1.1 Situation 1: NL = 5........................................................................................................... 6
1.1.1 Low velocity which is equivalent to 1st order ............................................................ 6
1.1.2 Middle velocity which is equivalent to 2nd order ..................................................... 10
1.1.3 High speed which is equivalent to 4th order .............................................................. 12 1.2 Situation 1: NL =
7.......................................................................................................191.2.1 Low velocity
which is equivalent to 1st order ........................................................................................... 15
1.2.2 Middle velocity which is equivalent to 2nd order ..................................................... 18
1.2.3 High speed which is equivalent to 4th order..............................................................27
1.3 Position and velocity response comment for 3 velocity levels:..................................30
2. PID Algorithm.................................................................................................................31 lOMoAR cPSD| 37054152 Requirements:
Q1: Each group has to choose the load parameters including soft-coupling stiffness (KL), inertia moment (J
) to satisfy the condition: 3 ≤ L), and viscous damping (DL
𝑁𝑁 ≤ 10 and 0 ≤ 𝑁
≤ 0.02 (at least 2 different loads in this range)
1. Create a simulink block diagram for a single axis servo system
2. Calculate all necessary parameters including load parameters and controlparameters
3. Simulate position responses at 3 different speed levels: - High speed - Middle speed - Low speed
Q2: Each group uses the motor in question 1. Write the PID algorithm using m-file of Matlab
to simulate to velocity control of the motor. The algorithm has to include the derivative filter
for D-term and anti-windup for I-term. Illustrate the effect of anti-windup in your results? 1 lOMoARcPSD| 37054152 Drive Servo System
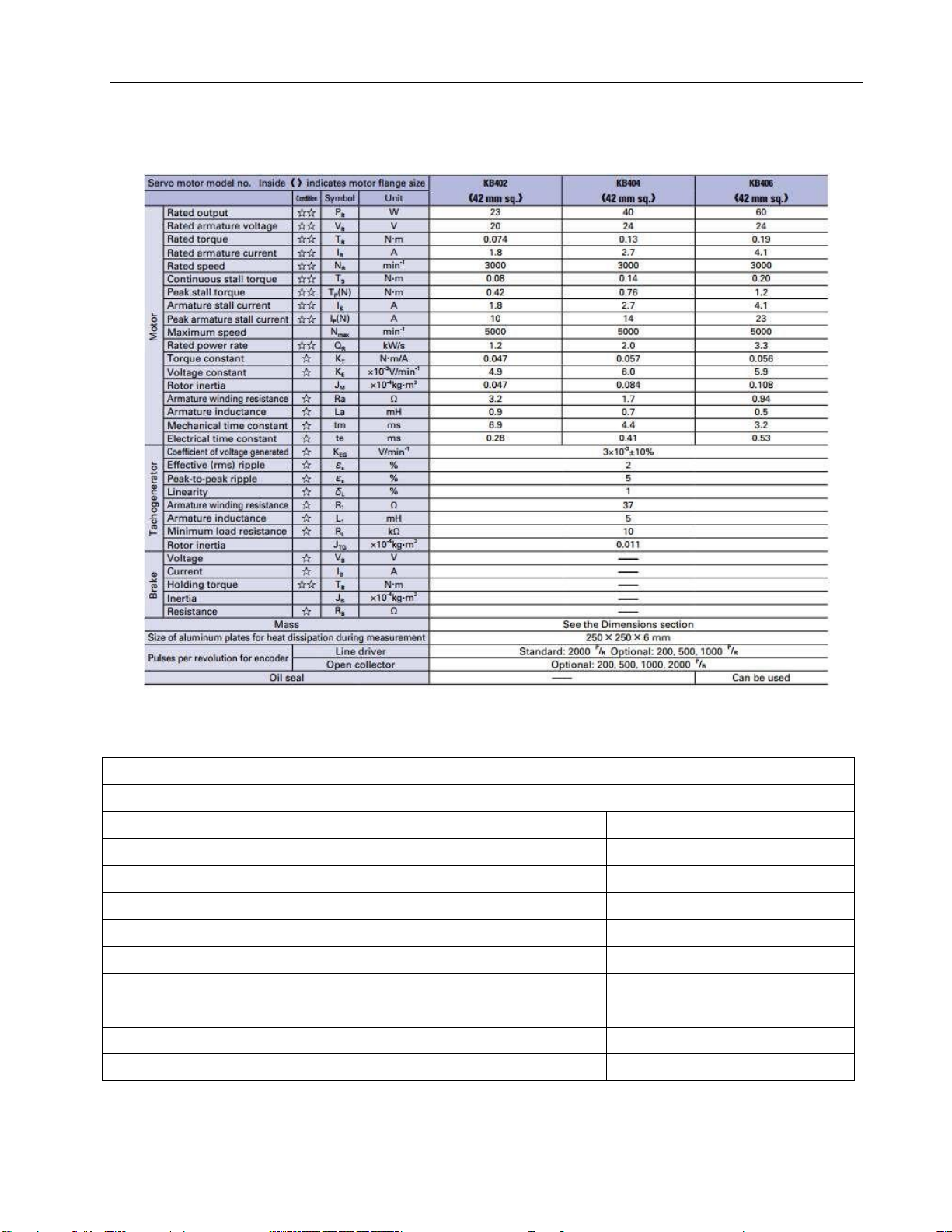
Figure 1. Datasheet of the motor KB404 Motor
Sanyo Denki – KB404 – 24VDC
Motor Characteristics Rated output (PR) W 40
Rated armature voltage (VR) V 24 Rated torque (TR) N.m 0.13
Rated armature current (IR) A 2.7 Rated speed (NR) min-1 3000
Continous stall torque (TS) N.m 0.14
Peak stall torque (TP(N)) N.m 0.76
Armature stall current (IS) A 2.7
Peak armature stall current (IP(N)) A 14 Maximum speed (Nmax) min-1 5000 lOMoAR cPSD| 37054152 Drive Servo System Rated power rate (QR) kW/s 2 Torque constrant (KT) N.m/A 0.057 Voltage constrant (KE) x10-3V/min-1 6.0 Rotor Inertia (JM) x10-4kg.m2 0.084
Armature winding resistance (Ra) Ω 1.7
Armature inductance (La) mH 0.7
Mechanical time constrant(tm) ms 4.4
Electrical time constrant(te) ms 0.41
Tachogenerator Option
Cofficient of votage generated (KEG) V/min-1 3x10-3 ± 10%
Effective (rms) ripple(ɛs) % 2
Peak-to-peak ripple (ɛs) % 5 Linearity(δL) % 1
Armature winding resistance(R1) Ω 37
Armature inductance(L1) mH 5
Minimum load resistance (RL) kΩ 10 Rotor inertia (JTG) x10-4kg.m2 0.011 Brake Voltage (VB) V Current (IB) A Holding torque (TB) N.m Inertia (JB) x10-4kg.m2 Resistance (RB) Ω
Encoder Specifications Items Unit Specifications Encoder type Incremental encoder Pulses per revolution P/R
Standard 2000 (Optional: 200, 500, 1000) Output circuit Line driver lOMoAR cPSD| 37054152 Drive Servo System Output phase difference
T2 to 6 = 1/4T0 ± 1/8T0 Zero-point signal T6 = T0 ± 0.4T0 Operating temperature oC 0 to +85 (inside the encoder) Inertia X10-4kgm2 0.005 Number of channels 3 Power supply VDC +5±5% Current consumption mA 160 max VDC VOH = 2.4 min., VOL = 0.5max. Output circuit voltage at I0 = ± 20 mA Output circuit current mA 20 max. Response frequency kHz 200 PWM duty cycle T1 = 1/2T0 ± 1/8T0 3
Table 1.1 Datasheet of the KB404 motor Rated ouput of motor kW 0.2 Rated torque of motor kgm 0.195 Rated velocity of motor rev/min 1000
Inertia moment of motor axis Jm kgm2 0.00224
Inertia moment of mechanism JL kgm2 0.00653
Natural angle frequency of mechanism part ωL rad/s 94.2
Damping rate of mechanism part xL 0.002 Encoder resoluion pulse/rev 2000
Gear deceleration ratio NG 1 lOMoAR cPSD| 37054152 Drive Servo System
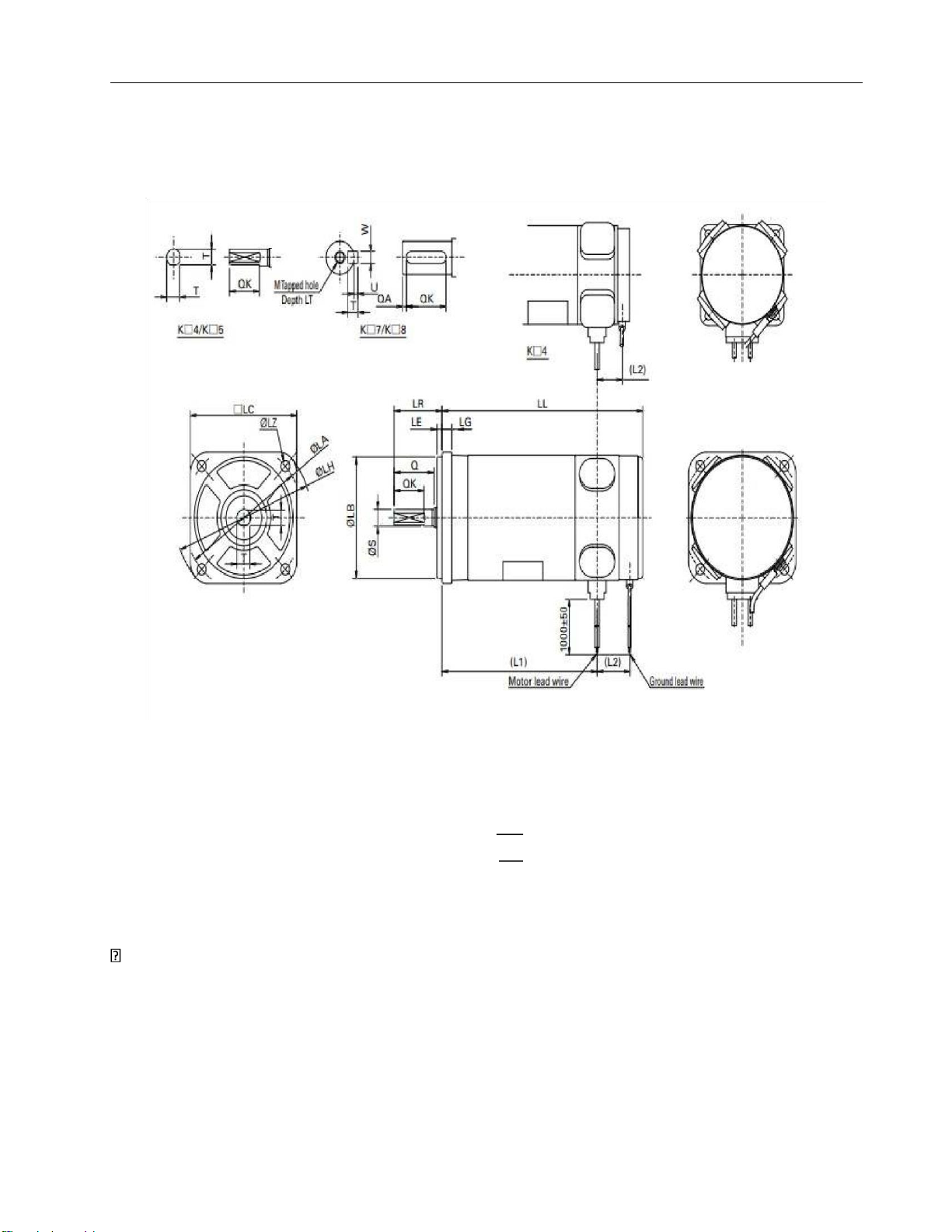
Figure 2. Sanyo Deiki KB404 Motor Drawing
Table 1.2 Lecture Slide
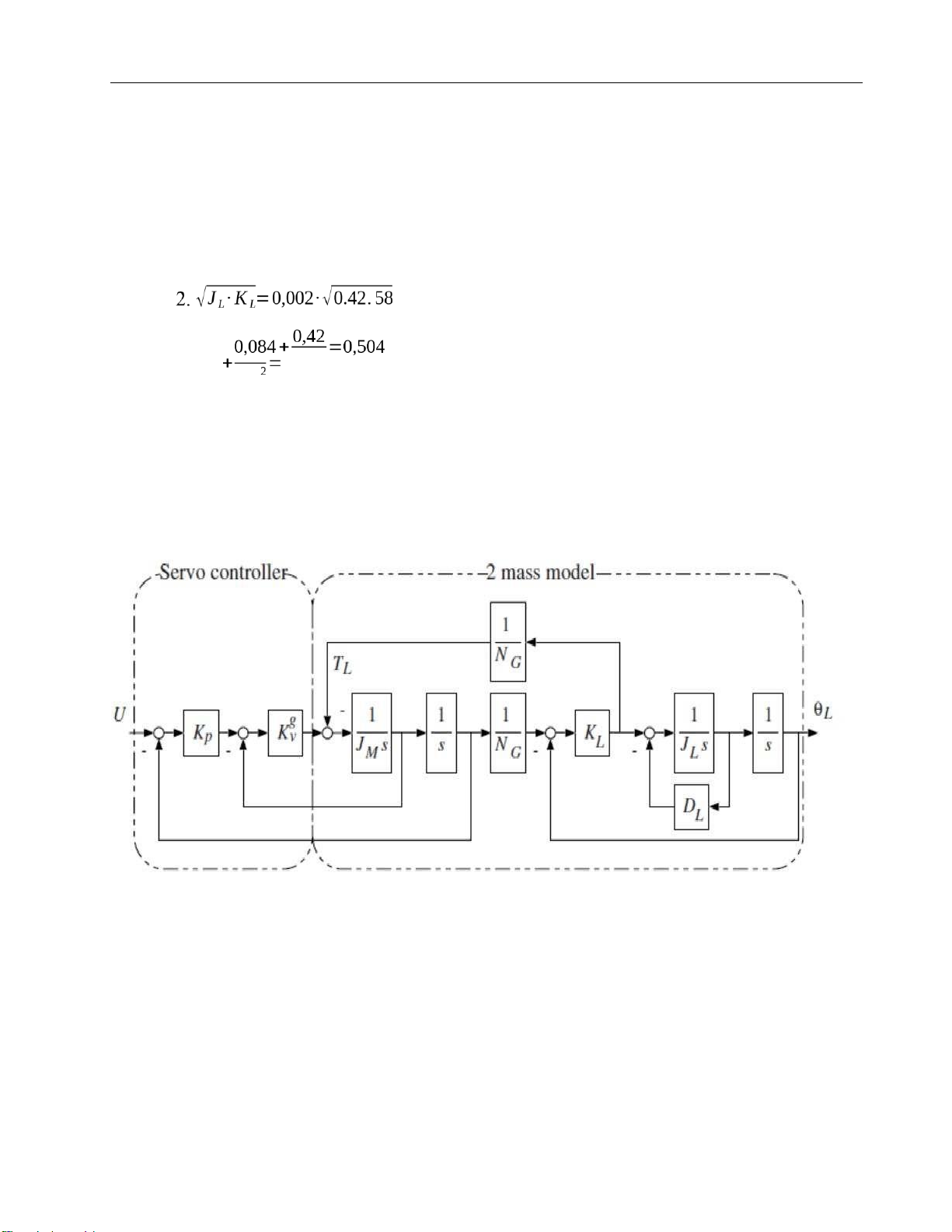
From the Table 1.2, we choose the hardness of solf joint KL √ ωL= JL K 2
L=ωL .JL=(94,2)2.0,00653=57,95 (N .m) lOMoARcPSD| 37054152 Drive Servo System
Thus, we choose the joint hardness KL=58(N .m)
The motor may have a gear box but in the simulation, we choose NG = 1
Q1 requires selecting at least 2 loads in the range from 3 to 10. Hence, we choosing NL = 5 and NL = 7
1. Simulation of 3 levels of velcoity for NL= 5 and NL=7 Power, P (W) 40 Max speed Nmax (rpm) 5000
Inertia JM (x 10-4kg.m2) 0.084
Damping rate if mechanism part xL 0.002
Spring constrant of mechanism part KL (N.m) 58
Gear deceleration ratio NG 1
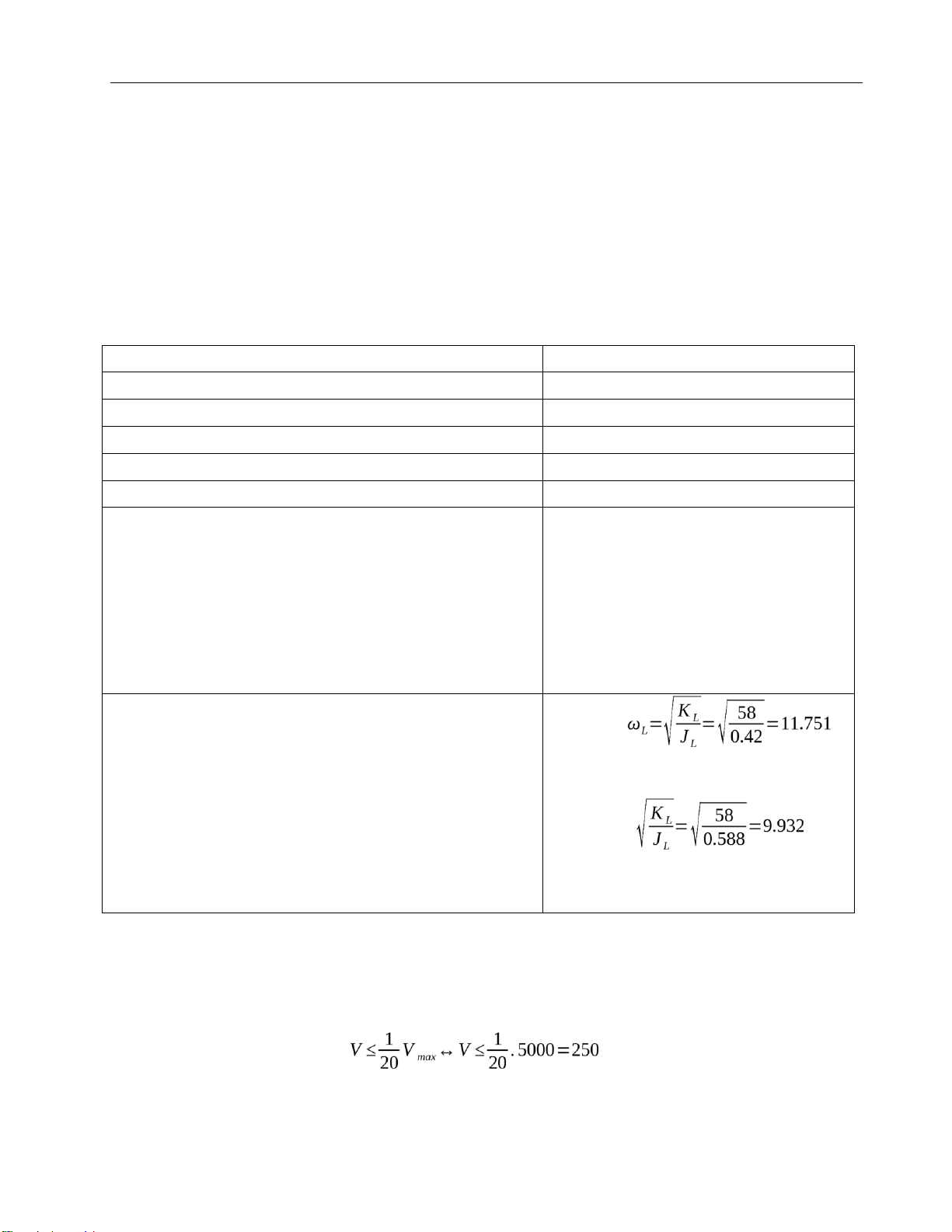
Inertia moment of mechanism part JL (x 10-4 + With NL =5 kgm2) J 2 L = NL.NG .JM = 5.1.0,084 = = 0.42 + With NL=7 J 2 L = NL.NG .JM = 7.1.0,084= = 0.588
Natural angle frequence of mechanism part ωL (rad/s) + With N L = 5 + With NL = 7 ωL=
*Note: In order to show clearly all reponses for whole velocity levels, our group decided to
select 200 rad for position to simulate the graph.
1.1 Situation 1: NL = 5
1.1.1 Low velocity which is equivalent to 1st order rpm
V ≤26,2rad/s = lOMoARcPSD| 37054152 Drive Servo System Choose V = 25 rad/s cp = 0,24; cv = 0,82
b0 = (1+NL) cpcv = (1+5).0,24.0,82=1,1808
b1 = (1+NL) (cv+2cpcvxL) = (1+5) (0,82 + 2.0,24.0,82.0,002) = 4,925 b0 1,1808
cp1=b1= 4,925 =0,24
Kp1=cp1.ωL=0,24.11.751=2.82024
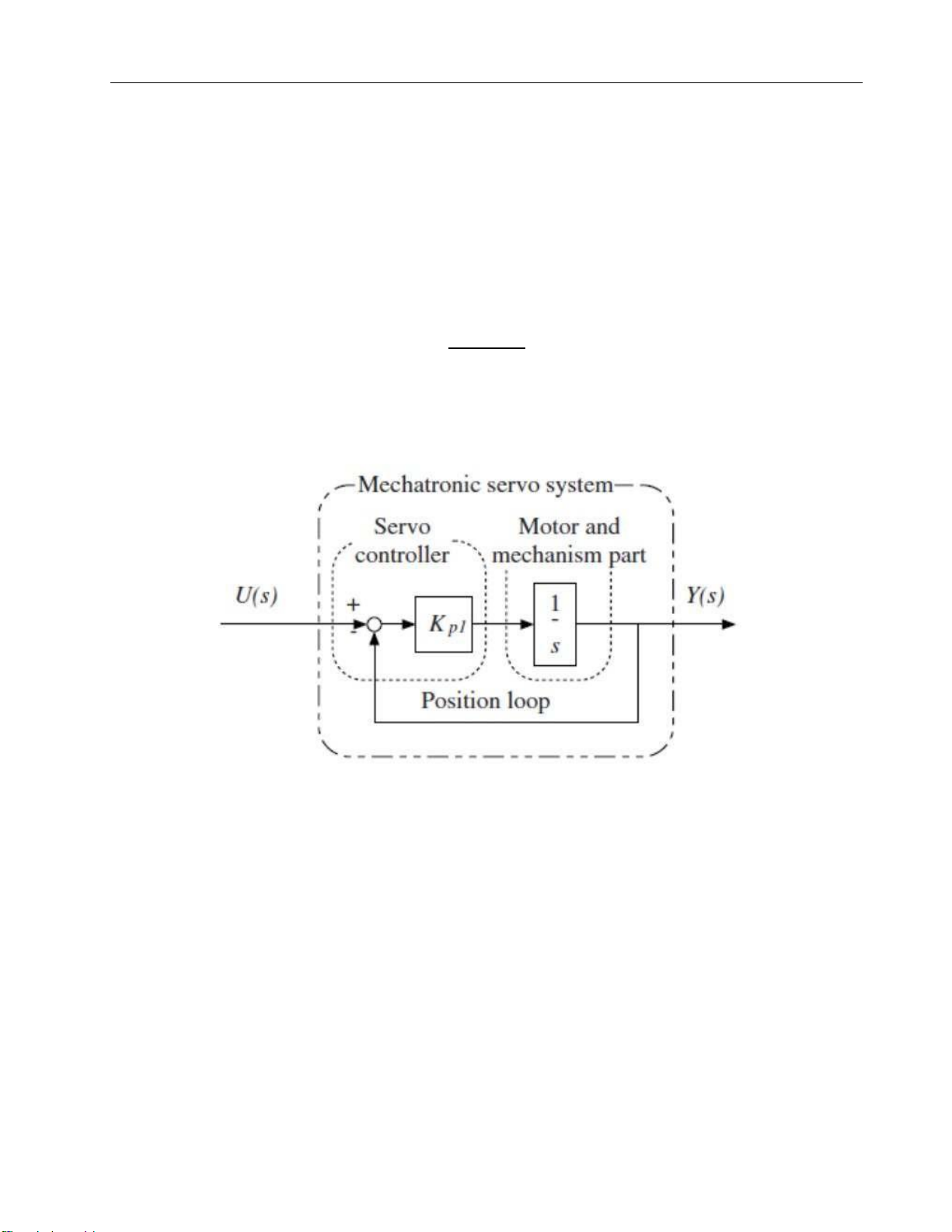
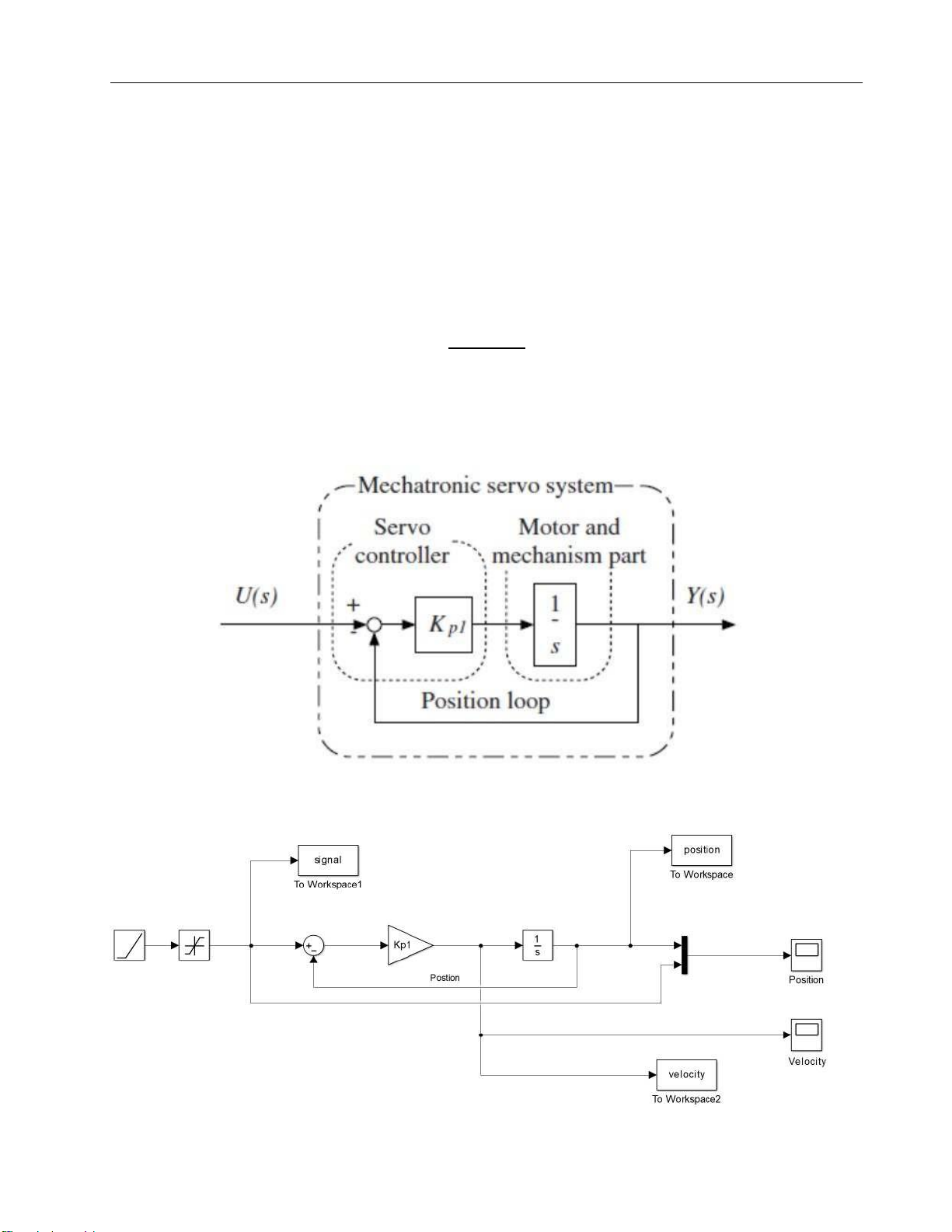
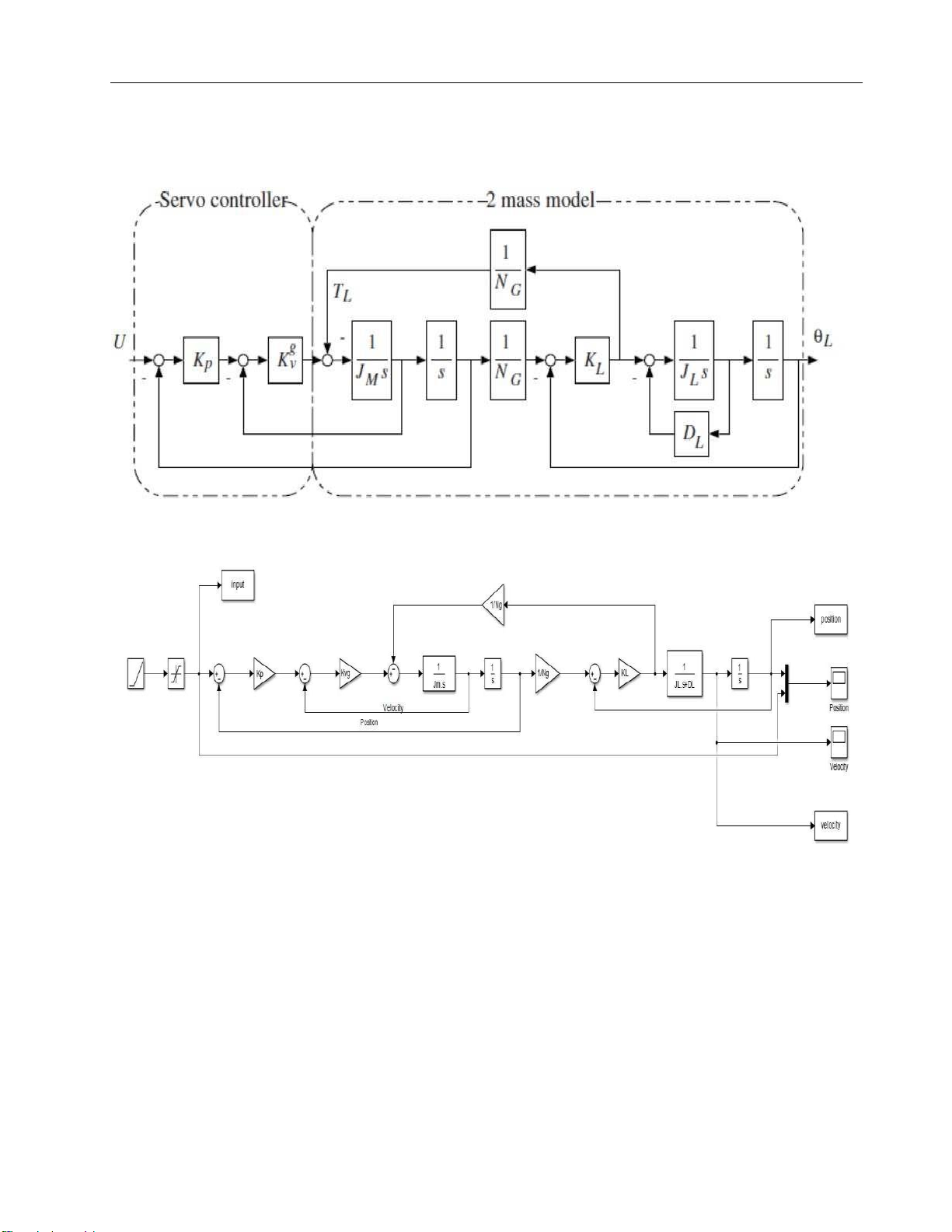
Figure 3. 1st order model of a servo system = lOMoARcPSD| 37054152 Drive Servo System
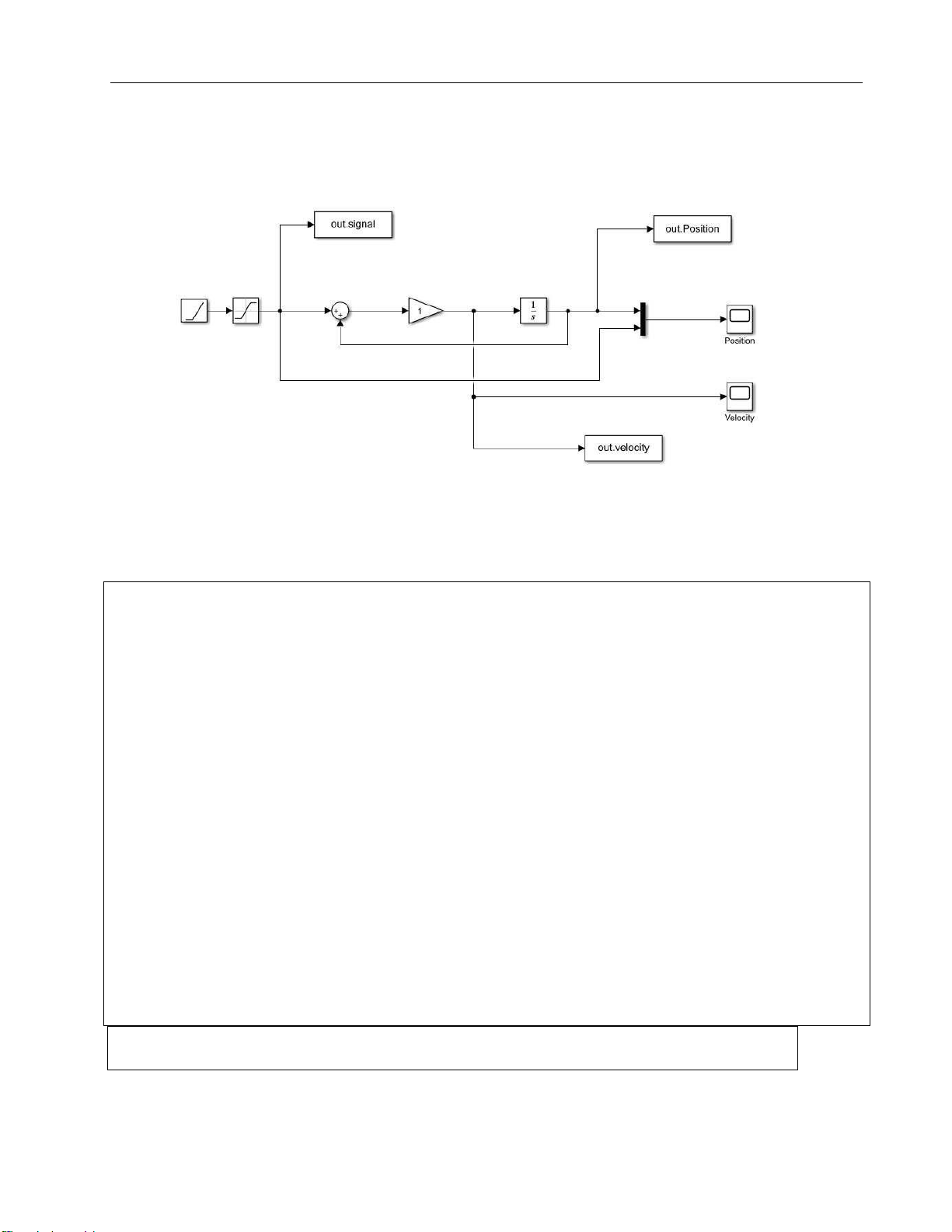
Figure 4. 1st order model modified in Matlab Simulink Code for simulation: clc clear all NL = 5; Ng = 1; Cp = 0.24; cv = 0.82; psi = 0.02; Jm = 0.084; KL = 58; % Formular JL = NL*Jm*(Ng^2); wL = sqrt(KL/JL); DL = 2*psi*sqrt(KL*JL); b0=(1+NL)*cp*cv; b1=(1+NL)*(cv+2*cp*cv*psi); cp1=b0/b1; Kp1 = cp1*wL; sim('Bac1_nl5') % matlab drawing hold on
plot(signal.Time, signal.Data, '--k', 'LineWidth',1) plot(position.Time, position.Data, '-r', 'LineWidth',1) legend('Input','Position')
%plot(velocity.Time, velocity.Data, '-r', 'LineWidth',1) grid on = lOMoARcPSD| 37054152 Drive Servo System
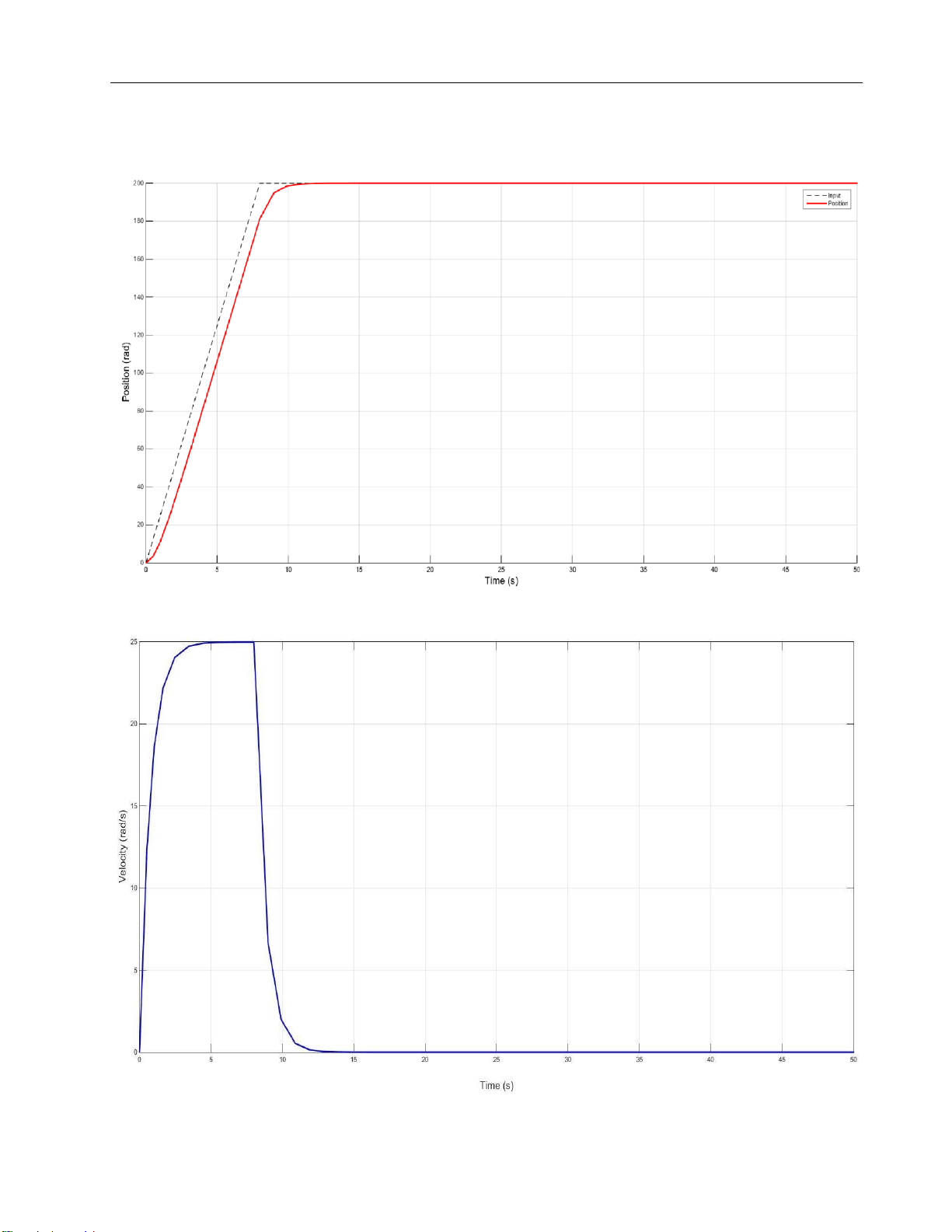
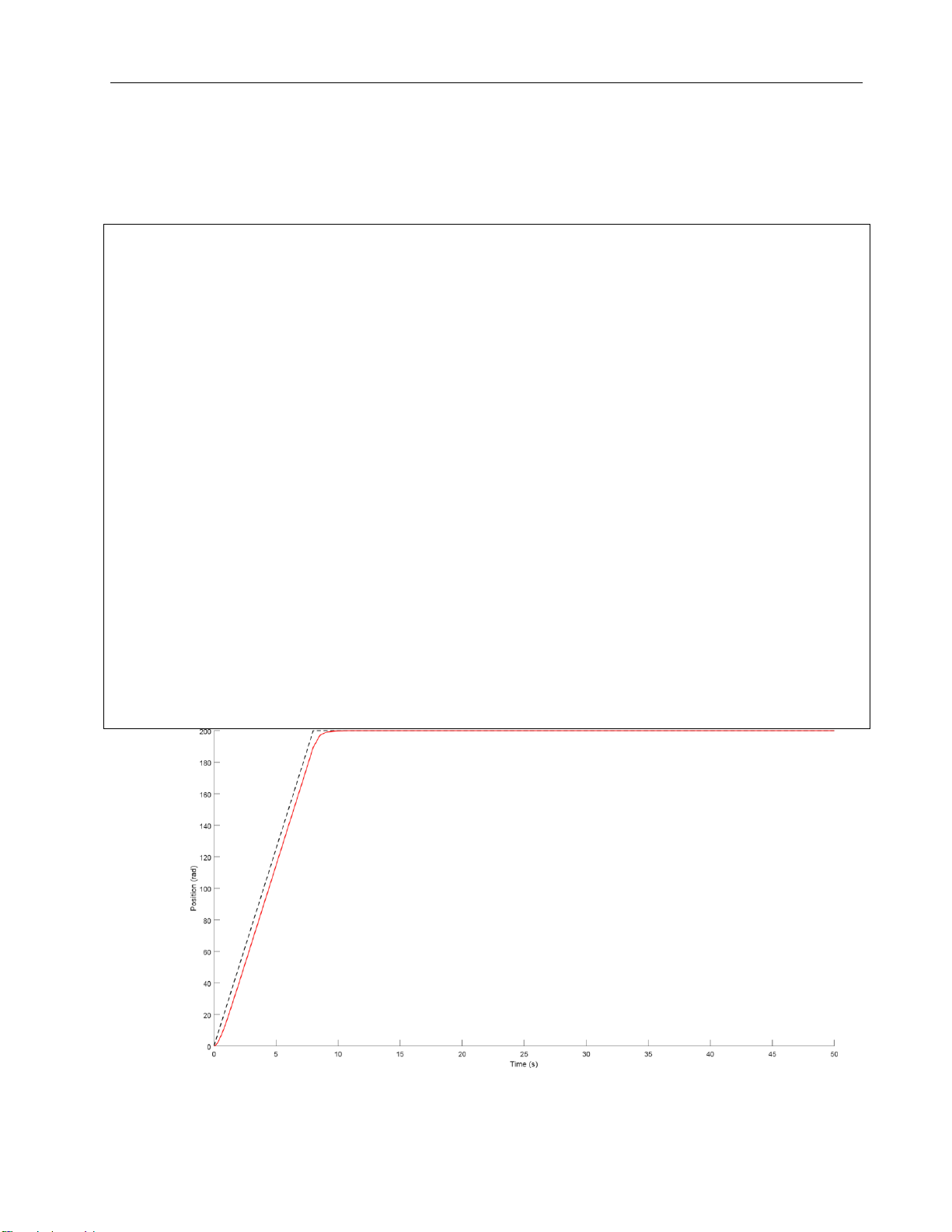
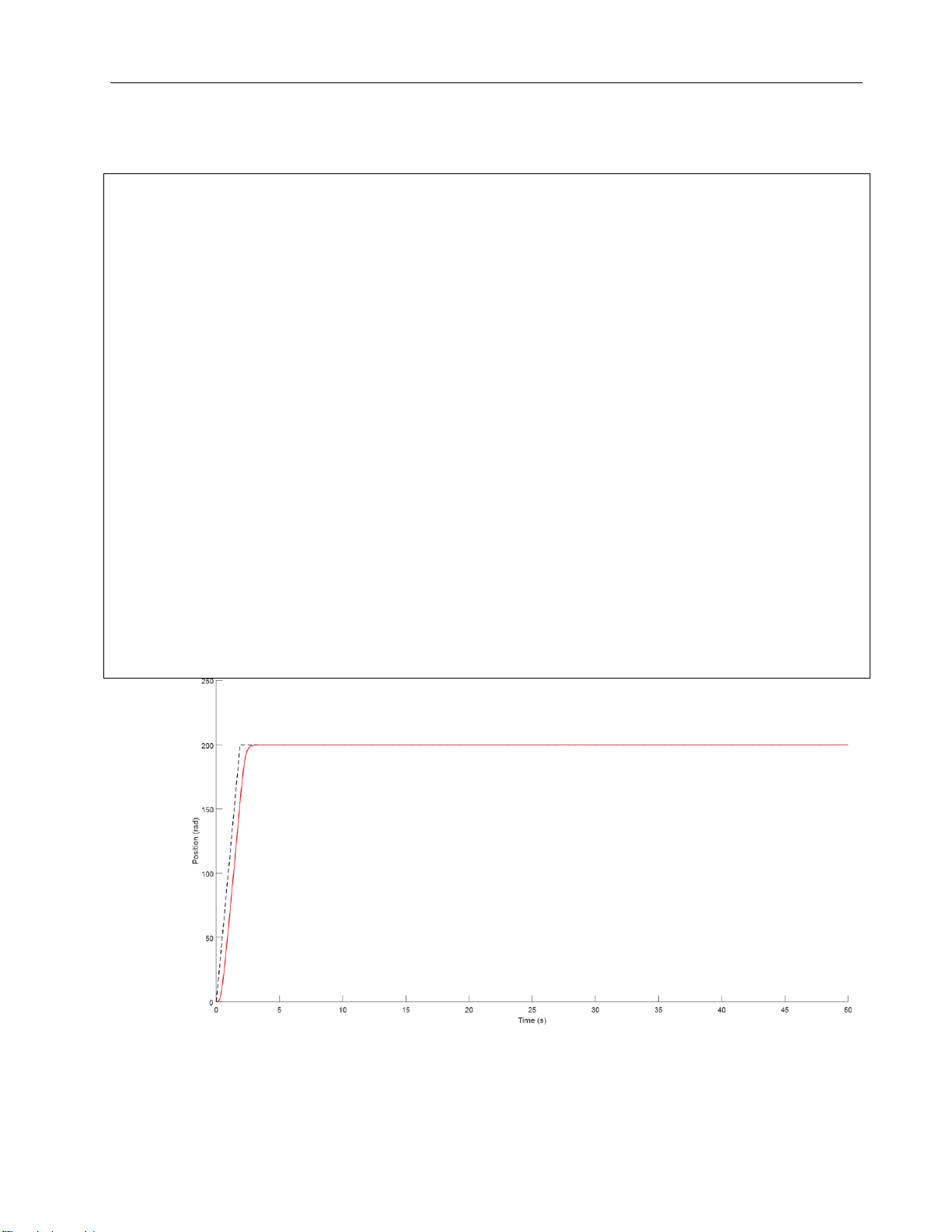
Figure 5. Graph of position in 1st order at position = 200 rad
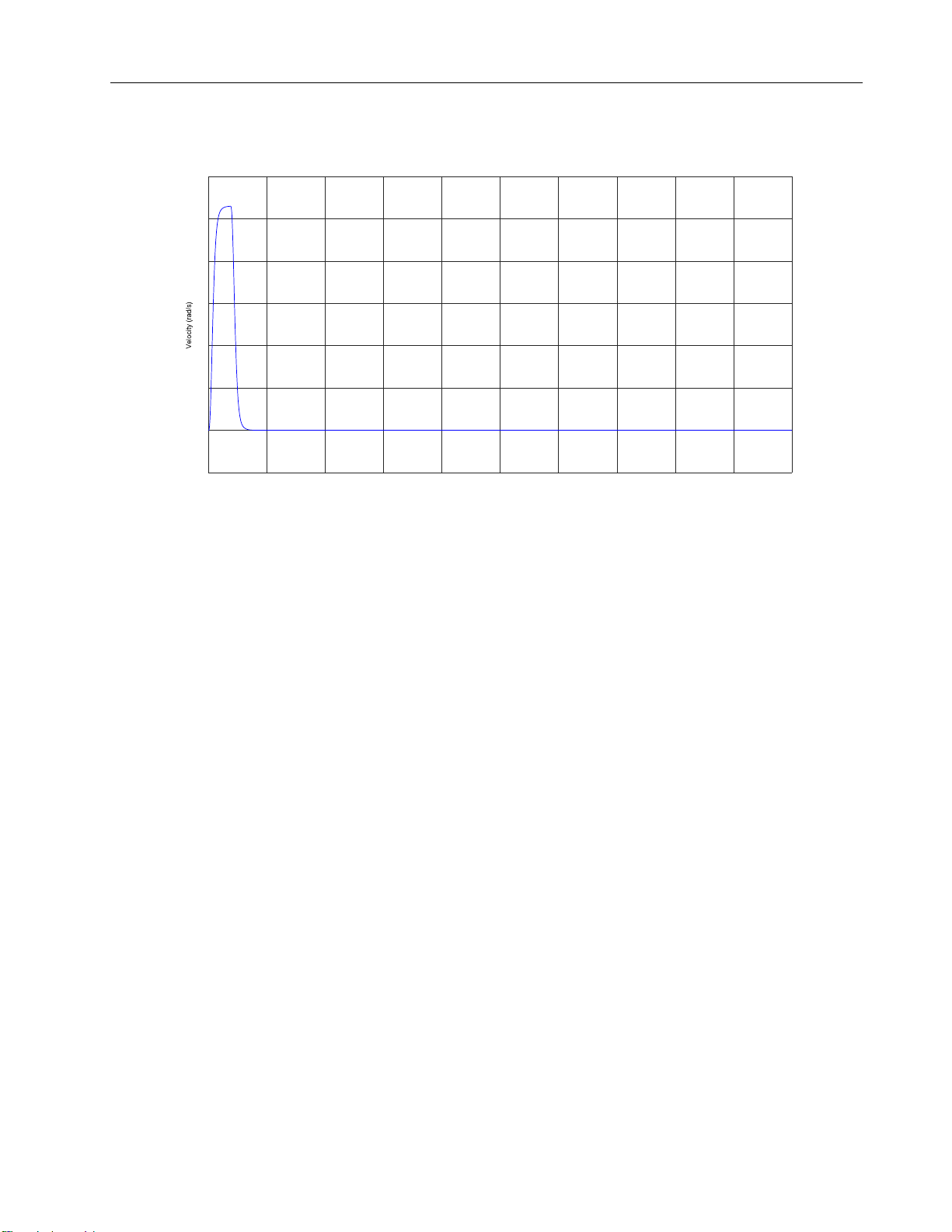
Figure 6. Graph of velocity in 1st order = lOMoARcPSD| 37054152 Drive Servo System
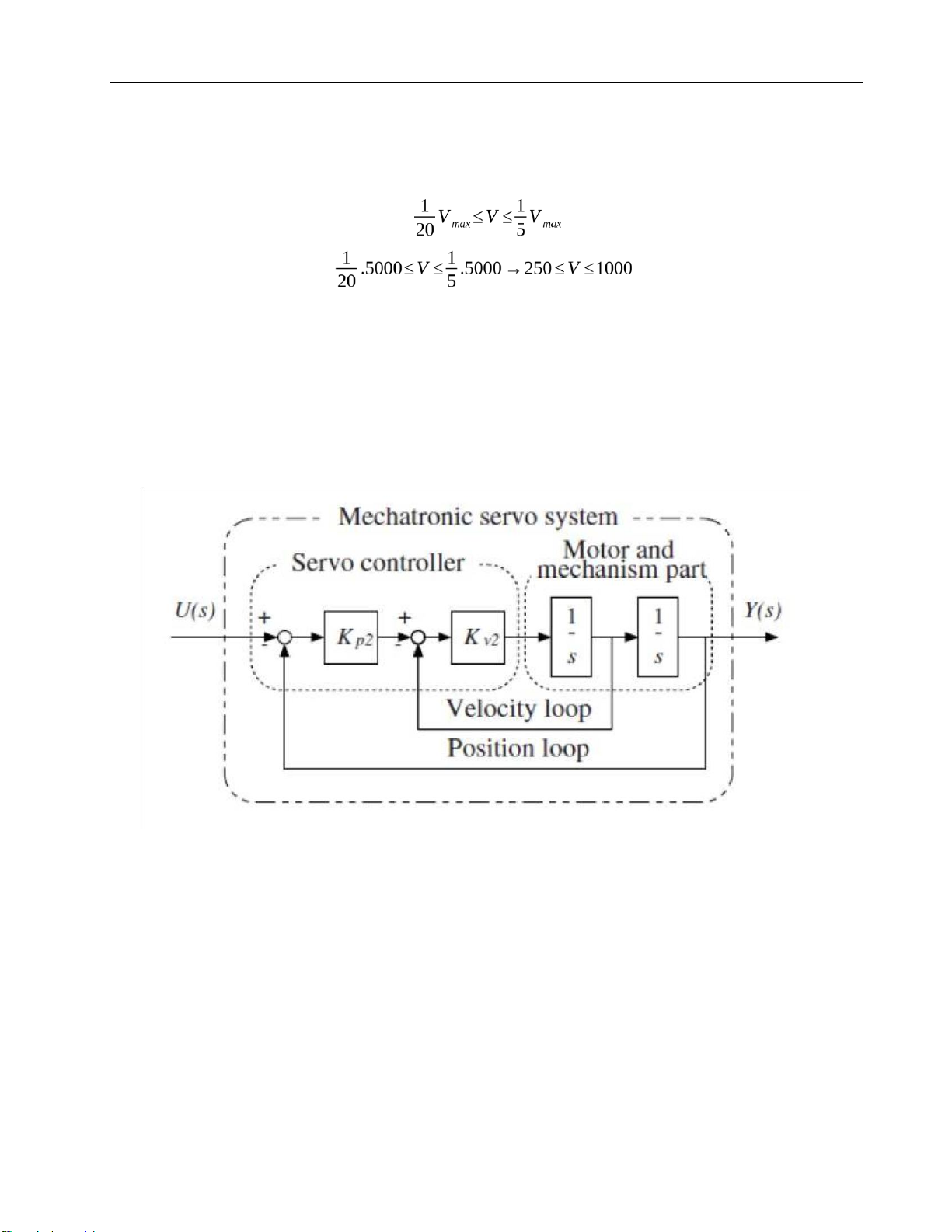
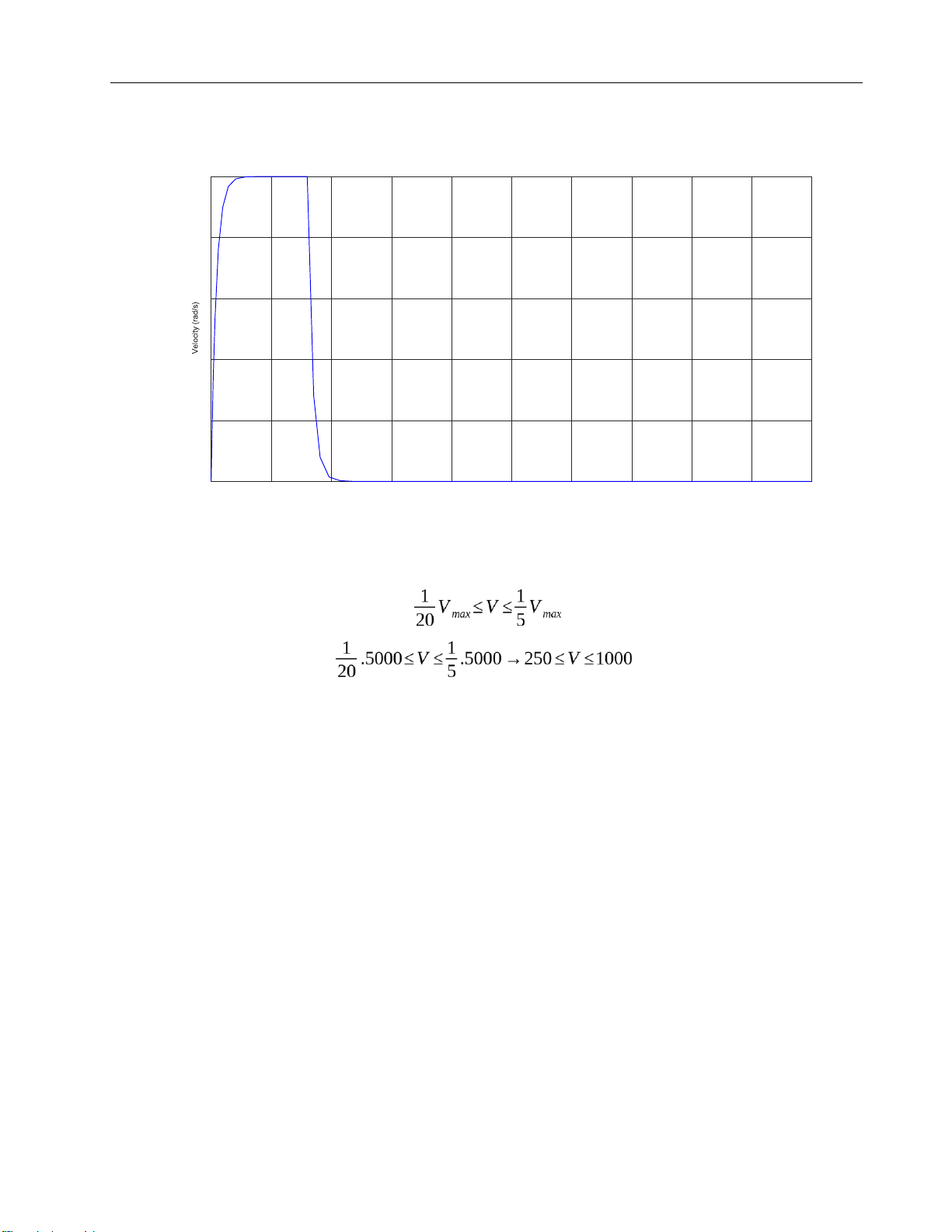
1.1.2 Middle velocity which is equivalent to 2nd order → rpm
→26,2≤V≤104,7rad/s Choose V = 100 rad/s
We have cp2 = 0,24; cv2 = 0,96
Kp2 = ωL.cp2= 0,24. 11,751 = 2,82024
Kv2 =ωL.cv2=¿0,96. 11,751 = 11,281
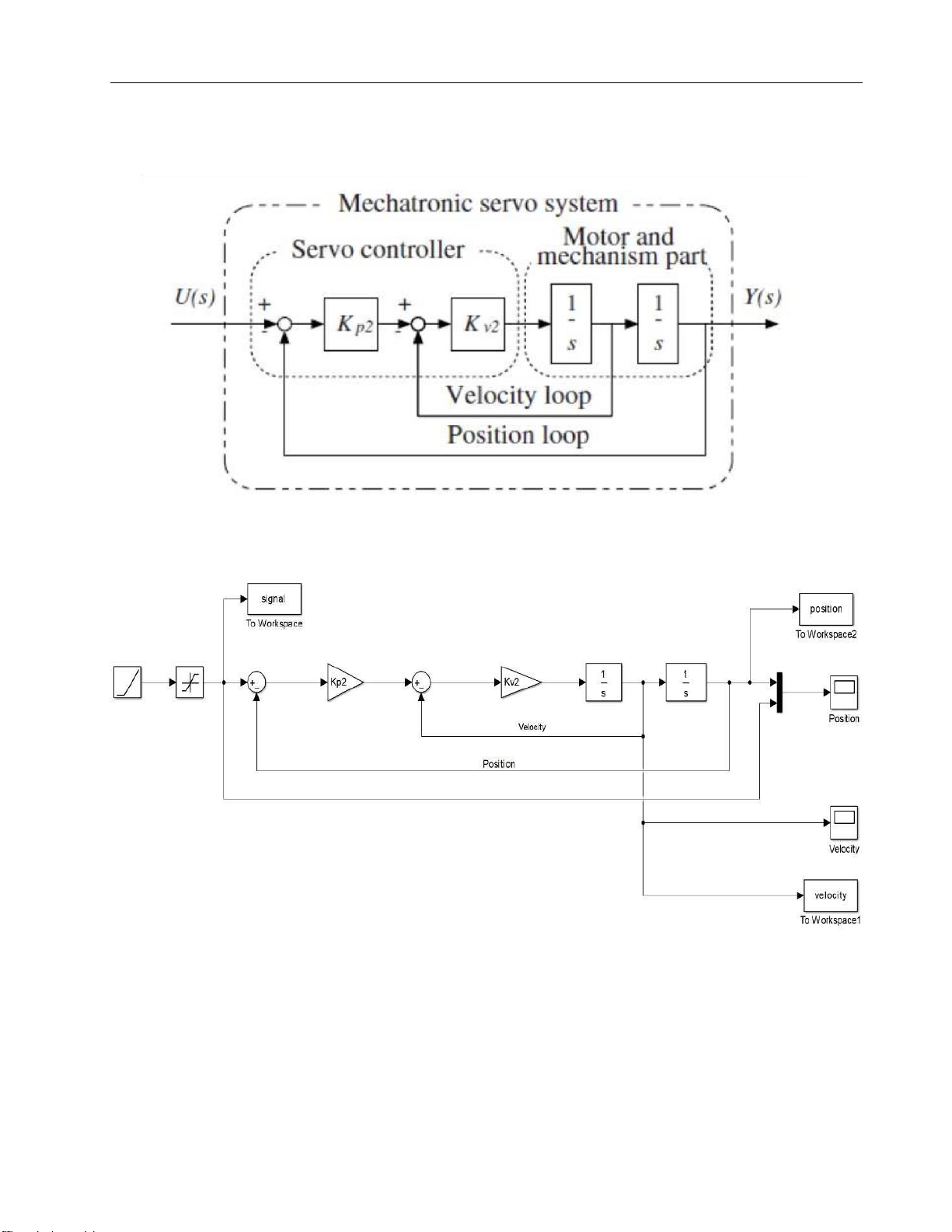
Figure 7. 2nd order model of a servo system = lOMoARcPSD| 37054152 Drive Servo System
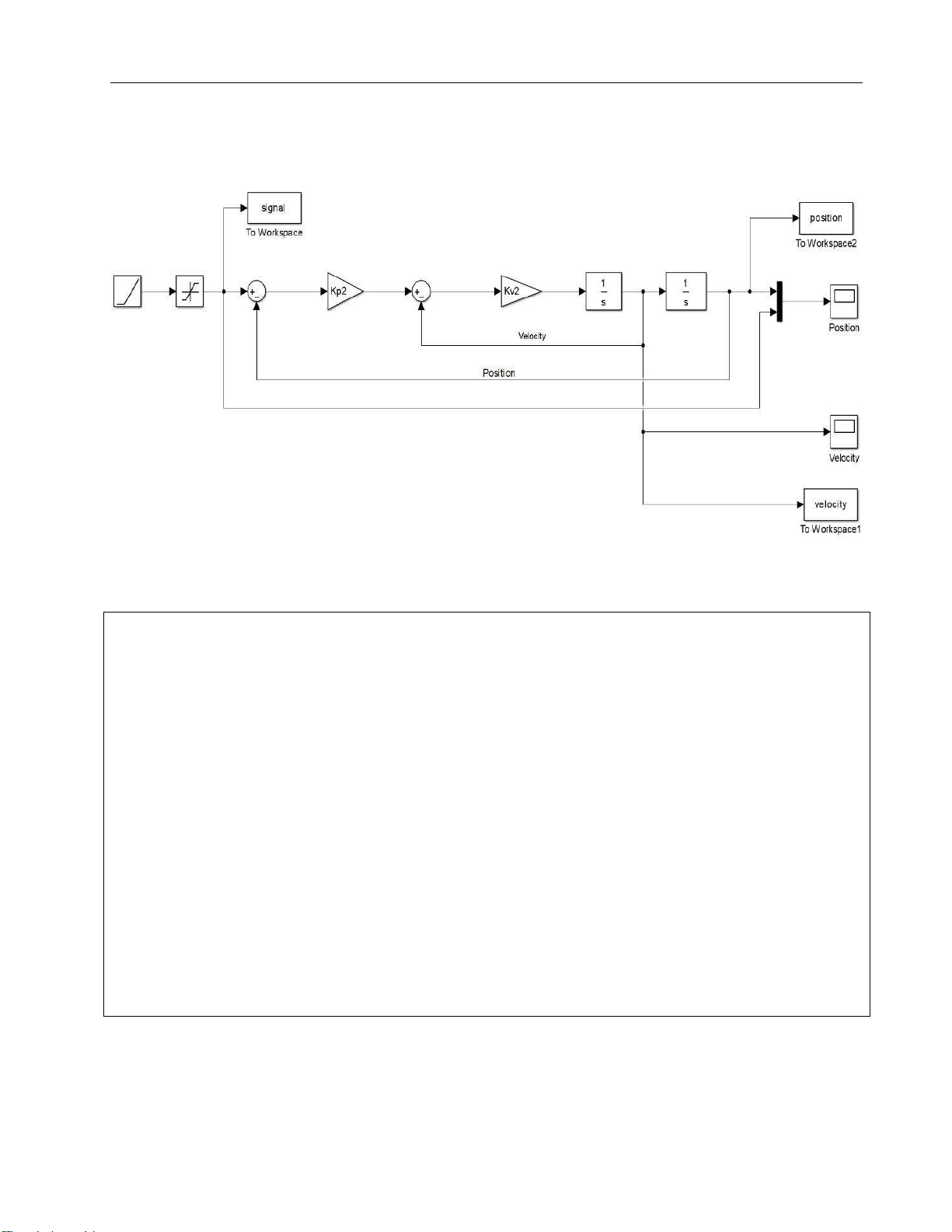
Figure 8. 2nd order model modified in Matlab Simulink Code for simulation: clc clear all cp2=0.24; cv2=0.96; KL=58; NL=5; Jm=0.084; Ng=1; JL = NL*Jm*(Ng^2); wL = sqrt(KL/JL); Kp2=cp2*wL; Kv2=cv2*wL; sim('Bac2_NL5') %ve do thi matlab hold on
plot(signal.Time, signal.Data, '--k', 'LineWidth',1) plot(position.Time, position.Data, '-r', 'LineWidth',1) legend('Input','Postion')
%plot(velocity.Time, velocity.Data, '-b', 'LineWidth',1) grid on = lOMoARcPSD| 37054152 Drive Servo System Time (s)
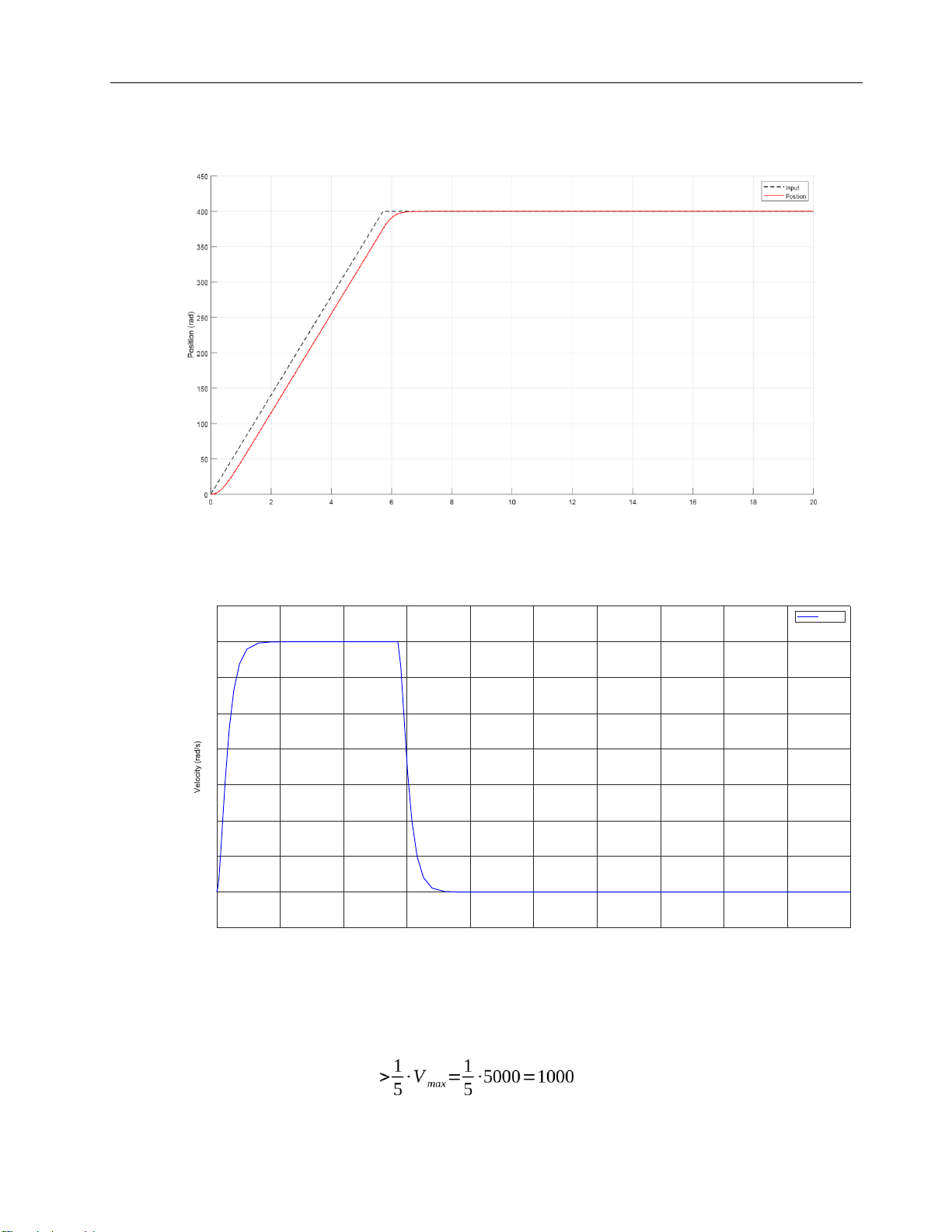
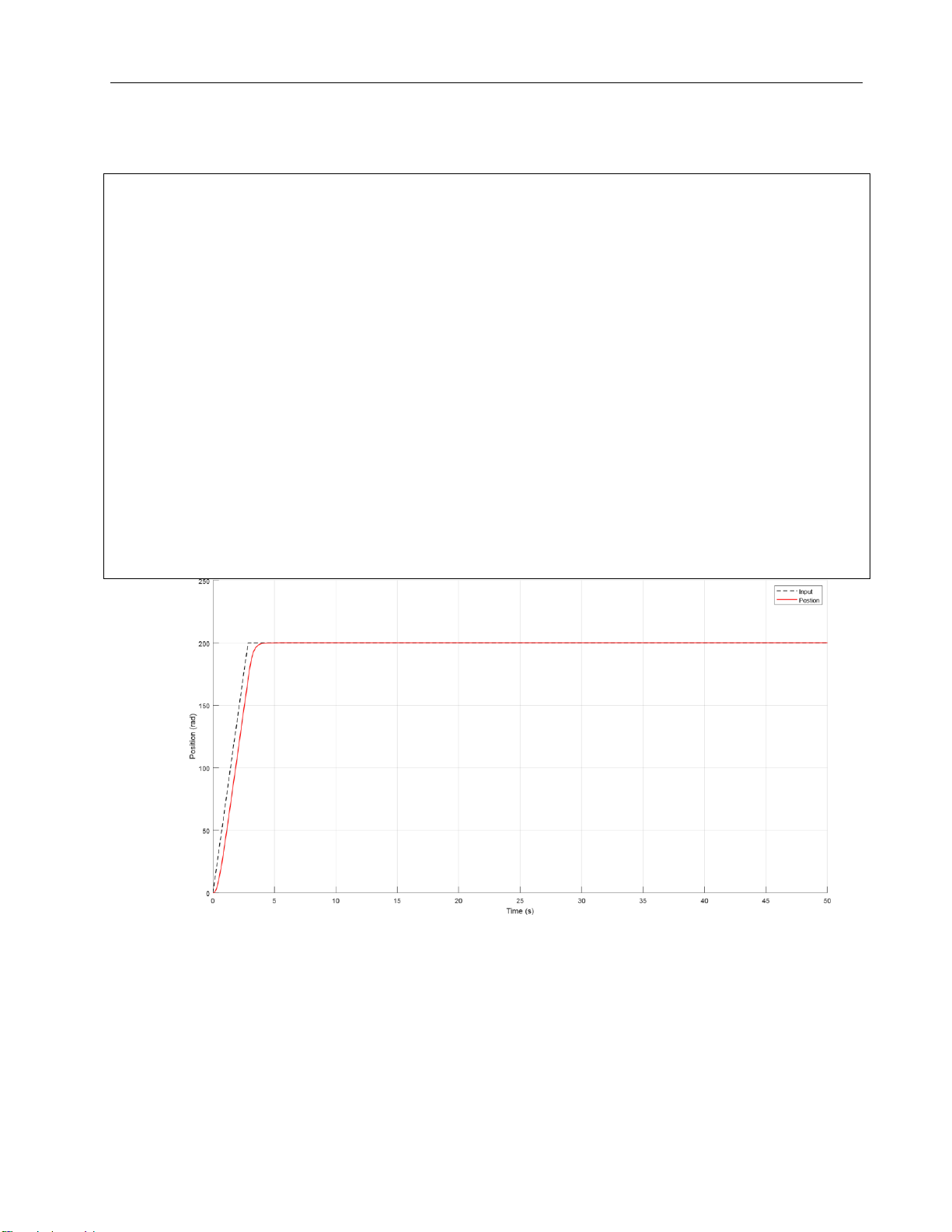
Figure 9. Graph of position in 2nd order at position = 400 rad 80 Velocity 70 60 50 40 30 20 10 0 -10 0 2 4 6 8 10 12 14 16 18 20 Time (s)
Figure 10. Graph of velocity in 2nd order
1.1.3 High speed which is equivalent to 4th order V rpm
→V>104,7rad/s = lOMoARcPSD| 37054152 Drive Servo System Choose V = 106 rad/s cp = 0,24; cv = 0,82 J 2
L = NL.NG .JM = 5.1. 0,084 = 0,42 DL = xL. = 0,0098 JL JT = JM NG 1
Kp = cp ∙ωL = 0,24. 11,751 = 2,82024
Kv = cv ∙ωL = 0,82. 11,751 = 9,63582
Kvg = Kv. JT = 9,63582. 0,504 = 4,856
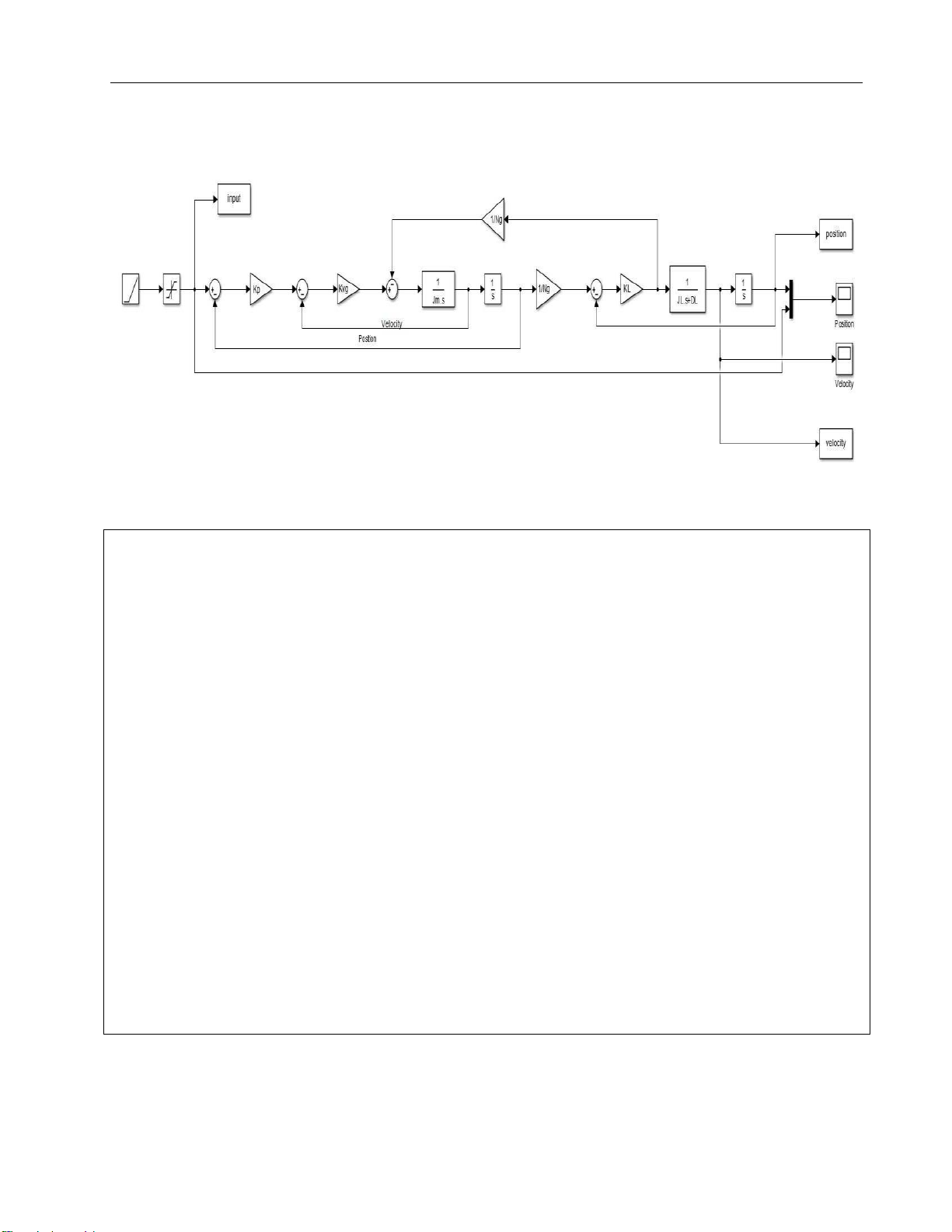
Figure 11. 4th order model of a servo system = lOMoARcPSD| 37054152 Drive Servo System
Figure 12. 4th order model modified in Matlab Simulink Code for simulation: clc clear all cp=0.24; cv=0.82; KL=58; Ng=1; Jm=0.084; psi=0.002; NL=5; %cong thuc cho bac 4 JL = NL*Jm*(Ng^2); wL = sqrt(KL/JL); DL=psi*2*sqrt(JL*KL); JT=Jm+(JL/(Ng^2)); Kp=cp*wL; Kv=cv*wL; Kvg=Kv*JT; sim('Bac4_NL5') %ve do thi matlab hold on
plot(input.Time, input.Data, '--k', 'LineWidth',2) plot(position.Time, position.Data, '-r', 'LineWidth',2) legend('Input','Position')
plot(velocity.Time, velocity.Data, '-b', 'LineWidth',2) grid on = lOMoARcPSD| 37054152 Drive Servo System
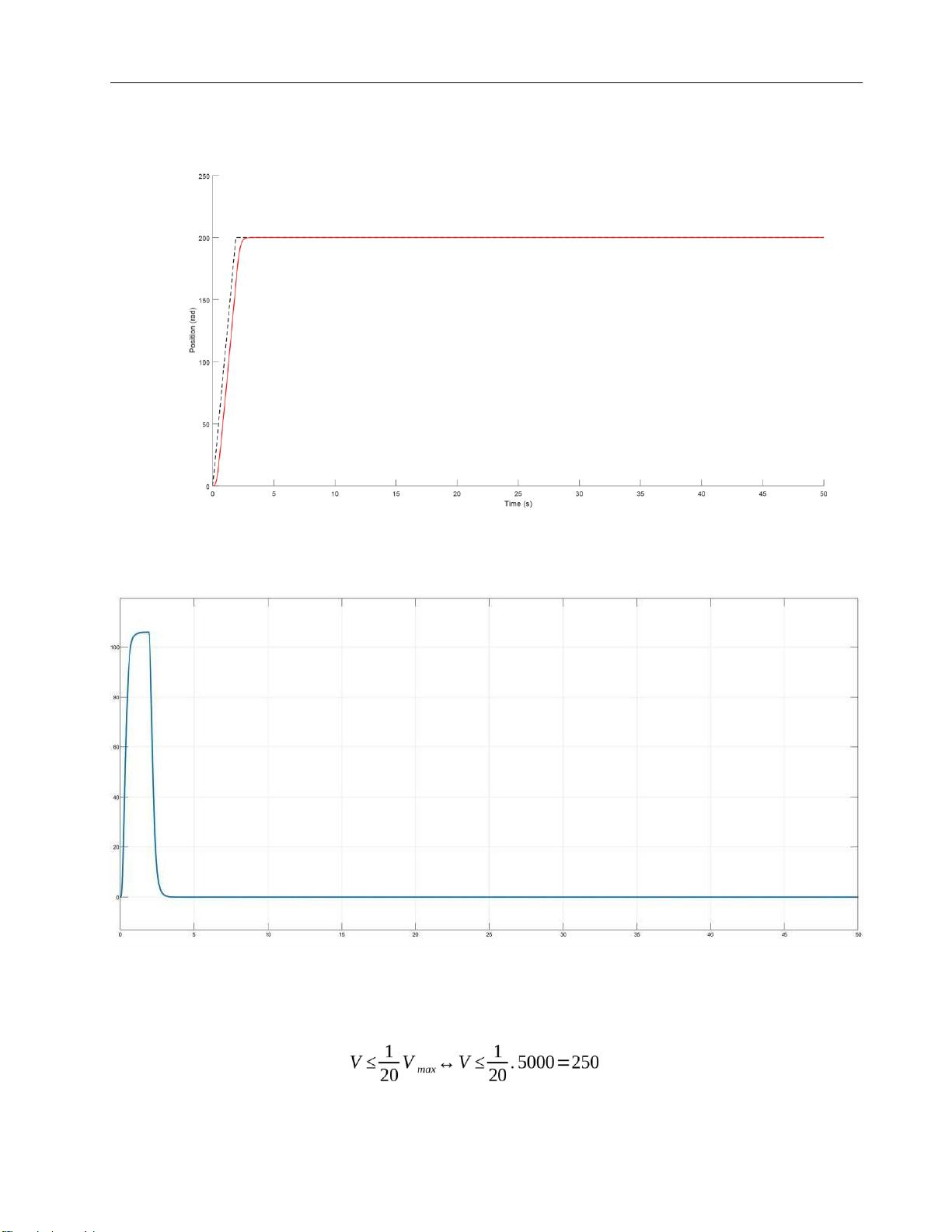
Figure 13. Graph of position in 4th order at position = 200 rad
Figure 14. Graph of velocity in 4th order
1.2 Situation 1: NL = 7
1.2.1 Low velocity which is equivalent to 1st order rpm
V ≤26,2rad/s = lOMoARcPSD| 37054152 Drive Servo System Choose V = 25 rad/s cp = 0,24 ; cv = 0,82
b0 = (1+NL)cpcv = (1+7).0,24.0,82=1,5744
b1 = (1+NL)(cv+2cpcvxL) = (1+7)(0,82 + 2.0,24.0,82.0,002) = 6,566 b0 1,5744
cp1=b1= 6,566 =0,24
Kp1=cp1.ωL=0,24.9,932=2,38368
Figure 15. 1st order model of a servo system = lOMoARcPSD| 37054152 Drive Servo System
Figure 16. 1st order model modified in Matlab Simulink Code for simulation: clc clear all NL=7; Ng=1; cp=0.24; cv=0.82; psi=0.02; Jm=0.084; KL=58; % Calculate the coefficents JL = NL*Jm*(Ng^2); wL = sqrt(KL/JL); DL = 2*psi*sqrt(KL*JL); b0=(1+NL)*cp*cv; b1=(1+NL)*(cv+2*cp*cv*psi); cp1=b0/b1; Kp1 = cp1*wL; sim('Bac1_NL5') % Plot hold on
plot(signal.Time, signal.Data, '--k', 'LineWidth',1) plot(position.Time, position.Data,
'-r', 'LineWidth',1) legend('Input','Position')
%plot(velocity.Time, velocity.Data, '-r', 'LineWidth',1) grid on
Figure 17. Graph of position in 1st order at position = 200 rad = lOMoARcPSD| 37054152 Drive Servo System 25 20 15 10 5 0 0 5 10 15 20 25 30 35 40 45 50 Time (s)
Figure 18. Graph of velocity in 1st order
1.2.2 Middle velocity which is equivalent to 2nd order → rpm
→26,2≤V≤104,7rad/s Choose V = 100 rad/s
We have cp2 = 0,24 ; cv2 = 0,96
Kp2 = ωL.cp2= 0,24 . 9,932 = 2,38368
Kv2 =ωL.cv2=¿0,96 . 9,932 = 9,53472 = lOMoARcPSD| 37054152 Drive Servo System
Figure 19. 2nd order model of a servo system
Figure 20. 2nd order model modified in Matlab Simulink Code for simulation: = lOMoARcPSD| 37054152 Drive Servo System clc clear all cp2=0.24; cv2=0.96; KL=58; NL=7; Jm=0.084; Ng=1; JL = NL*Jm*(Ng^2); wL = sqrt(KL/JL); Kp2=cp2*wL; Kv2=cv2*wL; sim('Bac2_NL5') % Plot hold on
plot(signal.Time, signal.Data, '--k', 'LineWidth',1) plot(position.Time, position.Data, '-
r', 'LineWidth',1) legend('Input','Postion')
% plot(velocity.Time, velocity.Data, '-b', 'LineWidth',1) grid on
Figure 21. Graph of position in 2nd order at position = 200 rad = lOMoARcPSD| 37054152 Drive Servo System 80 70 60 50 40 30 20 10 0 -10 0 5 10 15 20 25 30 35 40 45 50 Time (s)
Figure 22. Graph of velocity in 2nd order
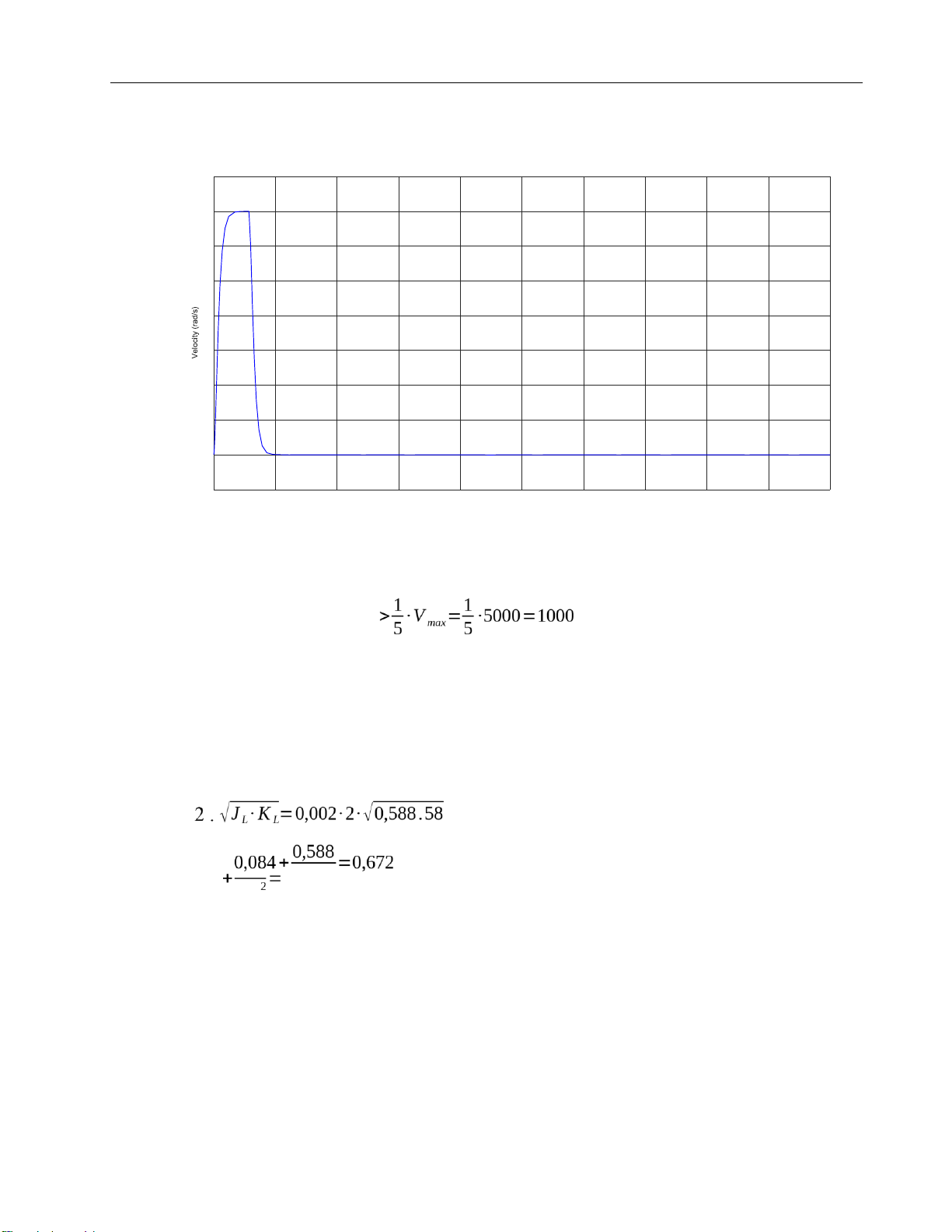
1.2.3 High speed which is equivalent to 4th order V rpm
→V>104,7rad/s Choose V = 106 rad/s cp = 0,24 ; cv = 0,82 J 2
L = NL . NG . JM = 7 . 1 . 0,084 = 0,588 DL = xL . = 0,023 JL JT = JM NG 1
Kp = cp ∙ωL = 0,24 . 9,932 = 2,38368
Kv = cv ∙ωL = 0,82 . 9,932 = 8,14424
Kvg = Kv . JT = 8,14424 . 0,672 = 5,473 = lOMoARcPSD| 37054152 Drive Servo System
Figure 23. 4th order model of a servo system
Figure 24. 4th order model modified in Matlab Simulink Code for simulation: = lOMoARcPSD| 37054152 Drive Servo System clc clear all cp=0.24; cv=0.82; KL=58; Ng=1; Jm=0.084; psi=0.002; NL=7;
% Formula for the 4 order JL =
NL*Jm*(Ng^2); wL = sqrt(KL/JL); DL=psi*2*sqrt(JL*KL); JT=Jm+(JL/(Ng^2)); Kp=cp*wL; Kv=cv*wL; Kvg=Kv*JT; sim('Bac4_NL5') % Plot hold on
plot(input.Time, input.Data, '--k', 'LineWidth',1) plot(position.Time, position.Data,
'-r', 'LineWidth',1) legend('Input','Position')
%plot(velocity.Time, velocity.Data, '-b', 'LineWidth',1) grid on
Figure 25. Graph of position in 4th order at position = 200 rad = lOMoARcPSD| 37054152 Drive Servo System 120 100 80 60 40 20 0 -20 0 5 10 15 20 25 30 35 40 45 50 Time (s)
Figure 26. Graph of velocity in 4th order
1.3 Position and velocity response comment for 3 velocity levels: -
The velocity in 3 cases corresponds to each speed level: "Low, medium, high" is 25,
70,106 rad/s respectively. The higher the velocity, the faster the desired position of 200 rad is
achieved. In all 3 cases, we can see there is no overshoot occuring. Hence, it is true to
necessary requirements of the Sevro engine. -
For NL=5 and NL=7 we can see no difference between 3 velocity levels : "Low,
medium, high". Obviously the parameters of the engine can meet in case 3≤NL≤10. Thus, it
satisfies the theoretical basis we have learned = lOMoARcPSD| 37054152 Drive Servo System 2. PID Algorithm
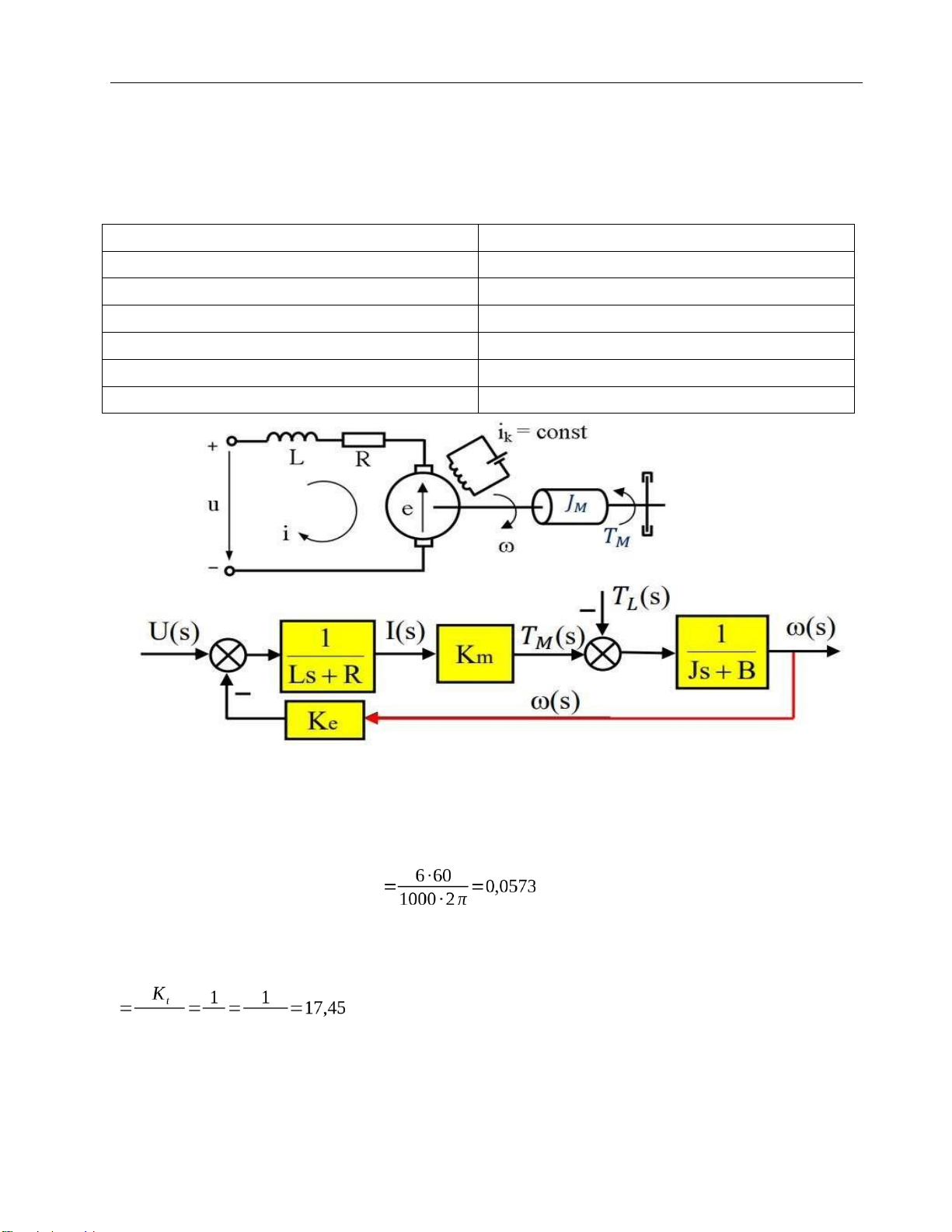
Table 2.1 Necessary parameter for Q2 Motor
Sanyo Denki KB404 – 24V
Vontage constant, Ke (x10-3V/min-1) 6,0
Torque Const., Kt (Nm/A) 0,057
Armature winding resistance, Ra (Ω) 1,7
Armature Inductance, La (mH) 0,7
Rotor Inertia, JM (x 10-4kg.m2) 0,084 Viscous Cofficient (b) 0
Figure 27. The block diagram of a DC motor
Converting the unit of Ke from 10-3V/min-1 into V/rad/s Ke V /rad/s
Notice that Ke = Kt which is right for the theory learnt
K-factor of DC motor drive function K Kt ∙ Ke K e 0,057 Response time = lOMoARcPSD| 37054152 Drive Servo System Ra∙J M
1,7∙0,084∙10−4 τ= = =0,0044(s)
Kt ∙K e 0,057∙0,057 Desired
response time: τc=0,002(s) Comment:
In the simulation of the PID algorithm, the group choose to skip the D stage in sevro DC K
motor control. The motor characteristic has the formula τM s+1 of the first order, so there is no
need to use the D stage. Therefore in the simulation, the group exclusively uses the PI control due to D is 0.
* However in the simulation, our group still program filter for D in order to meet the
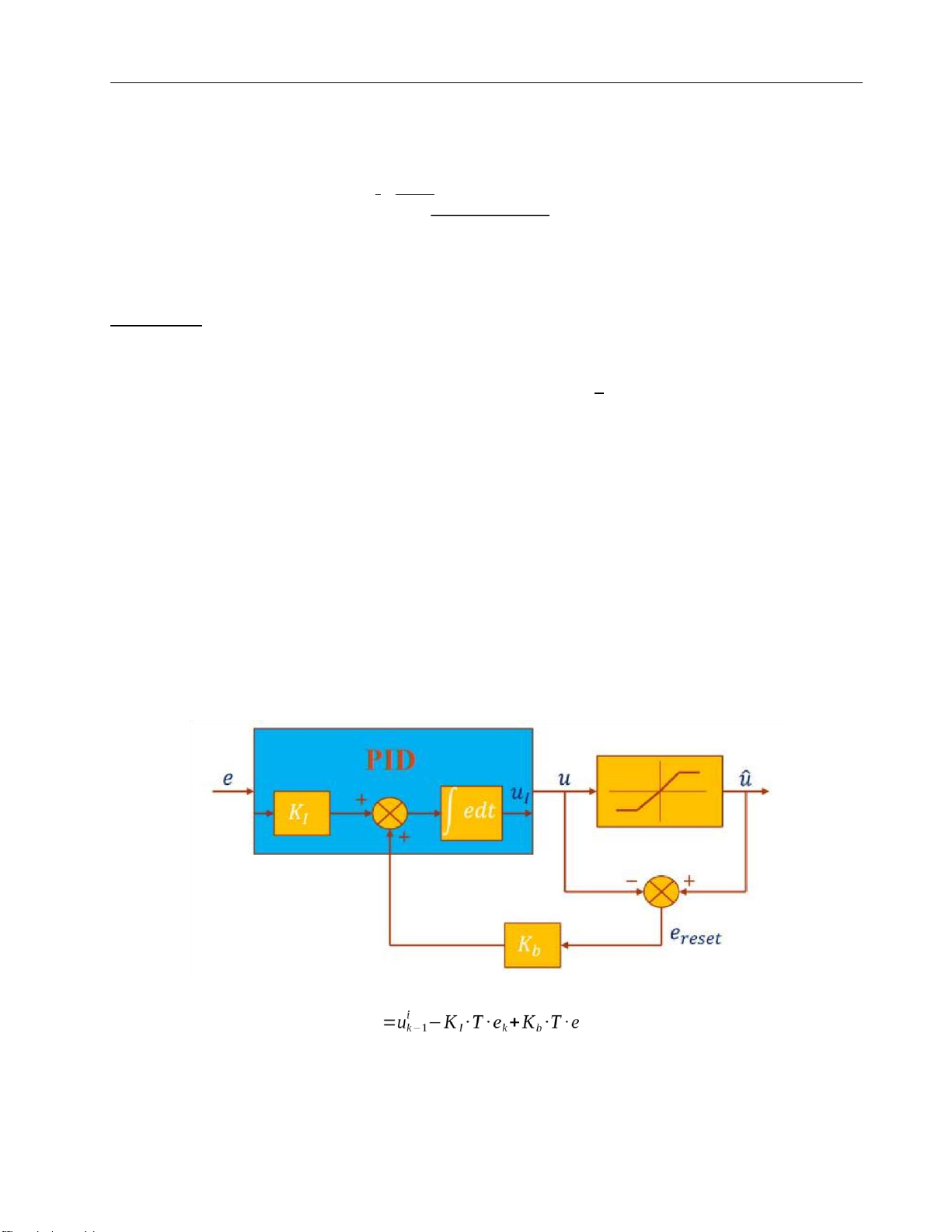
requirement P-term calculation: ukp=Kp∙ek Anti-windup:
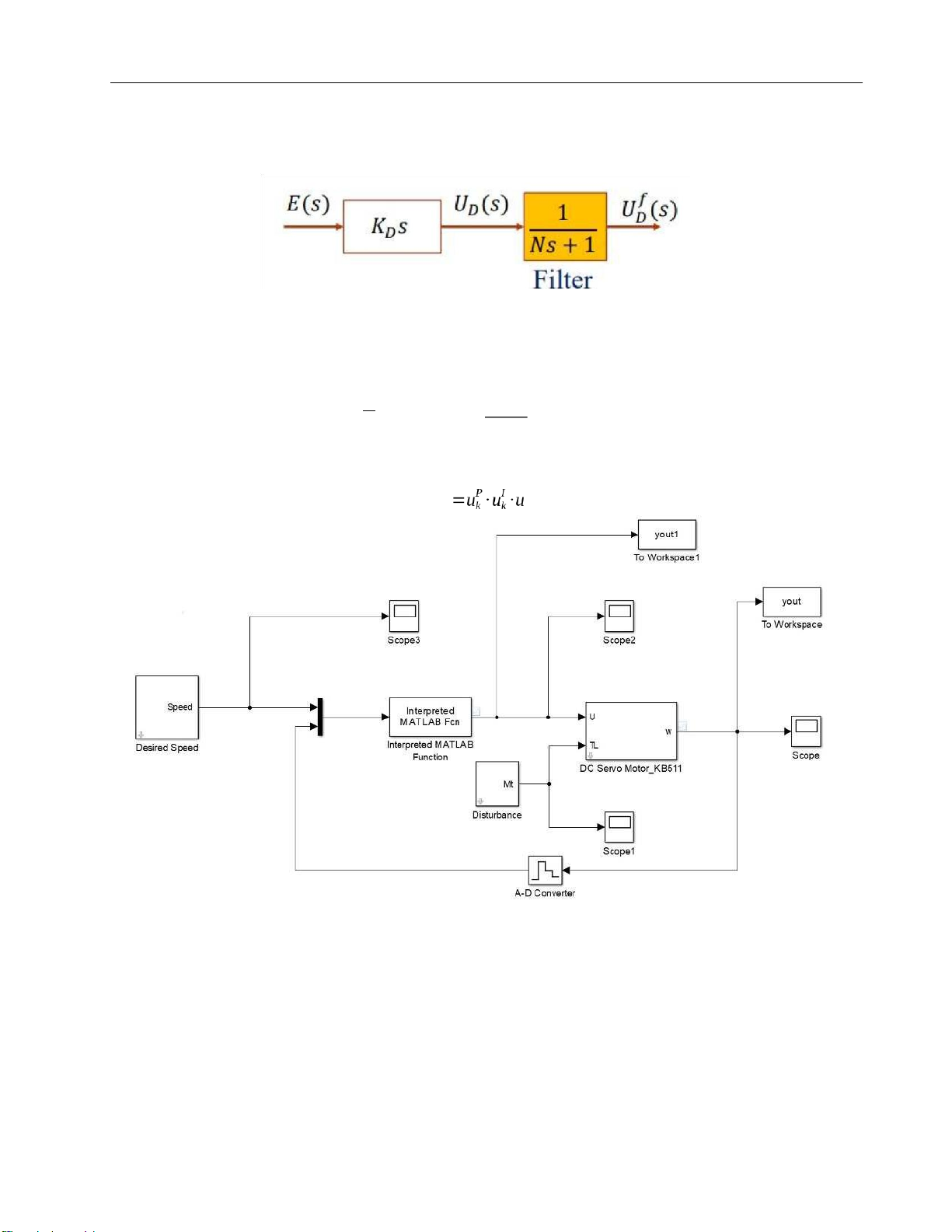
Figure 28. The anti-windup scheme for I-term uik resetk Low pass filter: = lOMoARcPSD| 37054152 Drive Servo System Figure 29. D- term low pass filter uD N K
f (k )= N +T ∙uDf ( k−1)+
N +DT ∙(e(k)−e(k−1))
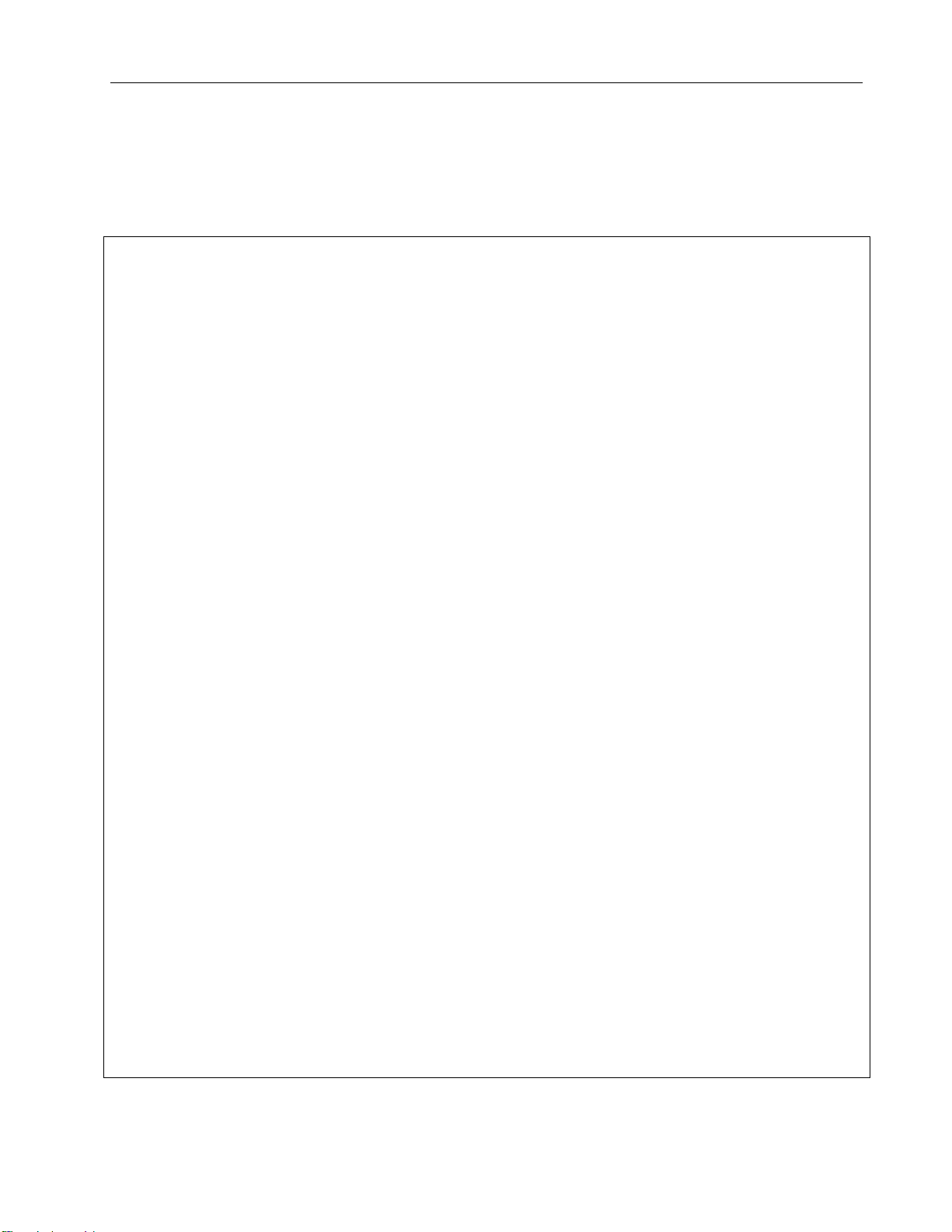
PID control’s paramenter including anti-windup for I-term and low pass filter D-term uk Dk
Figure 30. Model in Matlab Simulink = lOMoAR cPSD| 37054152 Drive Servo System Code: PID control: %Parameter Declaration %L, R, Km, Jm, b, Ke
global Ts Kb Kp Ki Kd err_previous e_reset yi_previous yd_f_previous alpha L = 0.3*10^-3; R = 0.44; Km = 0.06; Jm = 0.37*10^-4; b = 0; Ke = 0.06; %Ke = Kt = 0.58 K = 20; tau = 0.0045; % ~0.005 tauc = 0.02; Ts = 0.01; alpha = 0.9;
%Controller Specs: Kp, Kd, Ki, Kb Kp = tau/(K*tauc); Ki = Kp/tau; Kd = 0; Kb = 200; %Anti-windup err_previous = 0; e_reset = 0; yi_previous = 0; yd_f_previous = 0; sim('Simulation2'); %Graph = lOMoARcPSD| 37054152 Drive Servo System
figure(1); plot(yout.Time, yout.Data, '- r','LineWidth', 2) grid on
figure(2); plot(yout1.Time, yout1.Data, '- b','LineWidth', 2) grid on = lOMoARcPSD| 37054152 Drive Servo System PID function: function y = PID_Function(u)
global Ts Kb Kp Ki Kd err_previous e_reset yi_previous yd_f_previous alpha wd = u(1); wf = u(2); err = wd - wf; %Calculating P-term yp = Kp * err; %Low pass filter D-term yd = Kd * (err - err_previous)/Ts;
yd_f = (1 - alpha) * yd_f_previous + alpha * yd; %Anti-windup I-term
yi = yi_previous + Ki * err * Ts + Kb * e_reset * Ts; %Output value calculation yk = yp + yi + yd_f; err_previous = err; yi_previous = yi; yd_f_previous = yd_f; %Upper and Lower limits if yk > 24 e_reset = 24 - yk; yk = 24; elseif yk < -24 e_reset = -24 - yk; yk = -24; else e_reset = 0; end y = yk; end = lOMoARcPSD| 37054152 Drive Servo System
In this simulation, we divided into 3 cases: - System with no load.
- Sytem with small load that it’s still responding.
- System with big enough (high) load that its cannot responses.
The load will be applied in 2s, from 2s to 4s: = lOMoARcPSD| 37054152 Drive Servo System
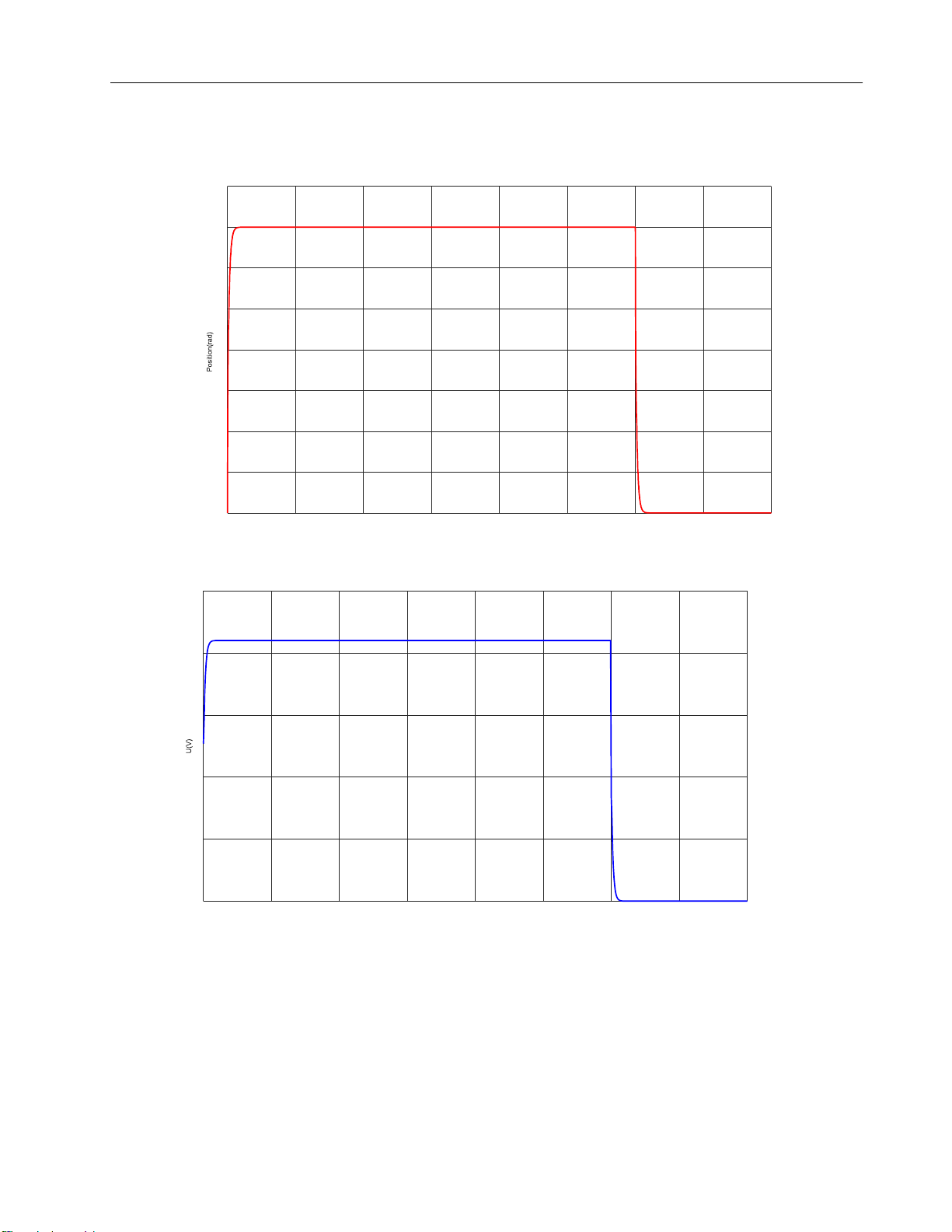
The output speed of position control 400 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 7 8 Time(s)
Output voltage of PID Controller 25 20 15 10 5 0 0 1 2 3 4 5 6 7 8 Time(s) Figur
e 31: System with no load
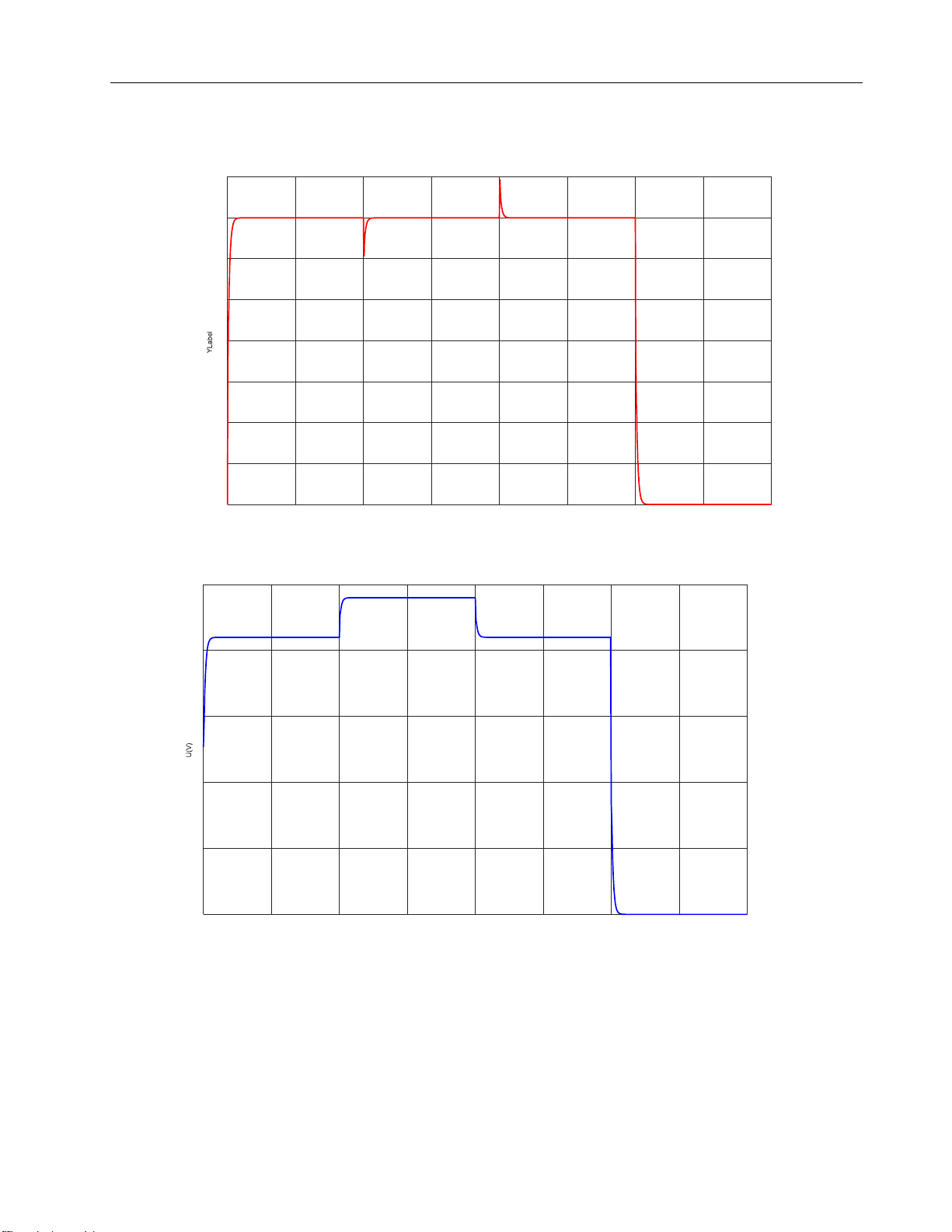
The output speed of posotion control = lOMoARcPSD| 37054152 Drive Servo System 400 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 7 8 Time(s)
Output voltage of PID Controller 25 20 15 10 5 0 0 1 2 3 4 5 6 7 8 Time(s) Figur
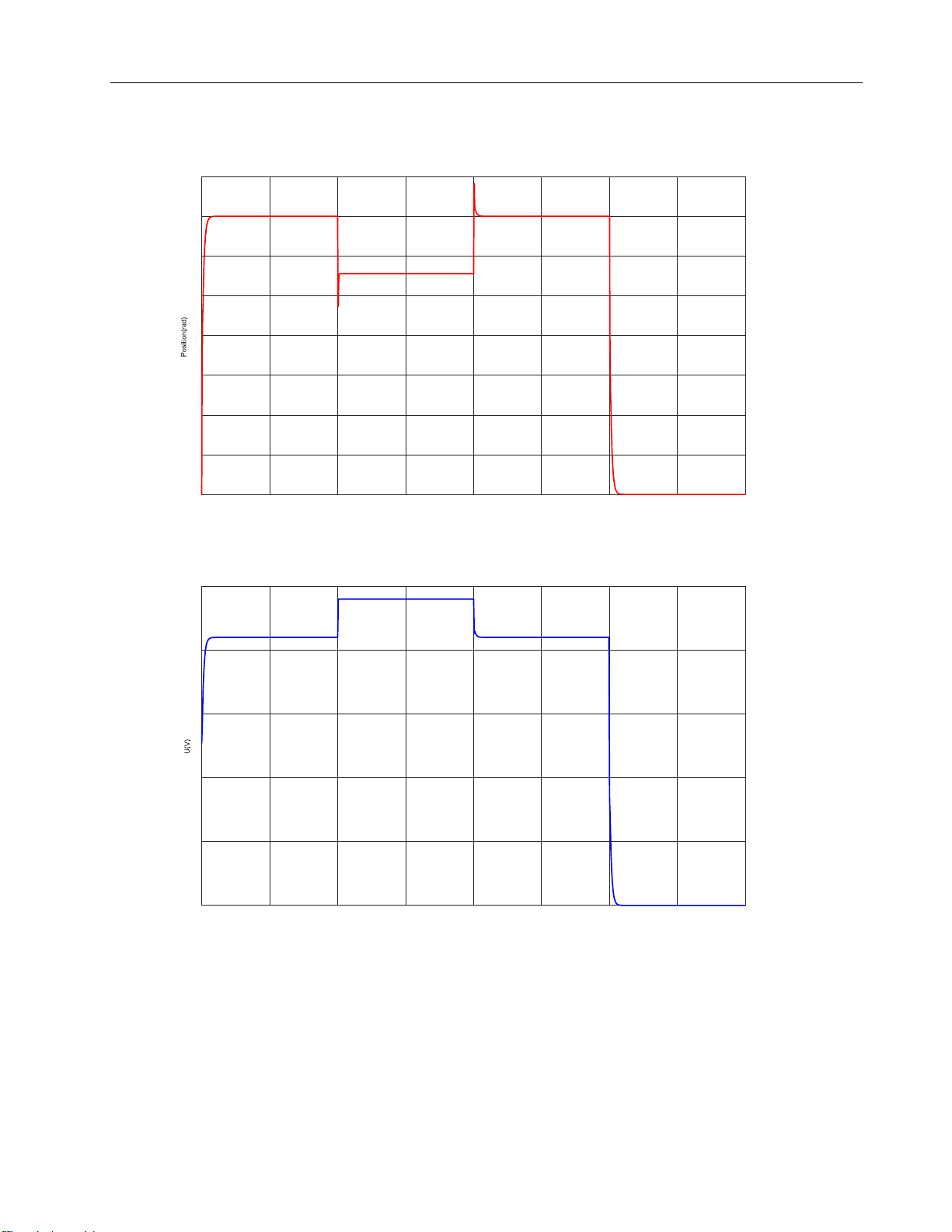
e 32: System with small load Title = lOMoARcPSD| 37054152 Drive Servo System 400 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 7 8 Time(s)
Output Voltage of PID Controller 25 20 15 10 5 0 0 1 2 3 4 5 6 7 8 Time(s)
Figure 33: System with high load Comment: Figure 32:
When the magnitude of the noise is small, the graph noise is still deflected down, but
in a short period of time, the graph can still return to its original position. The magnitude of = lOMoAR cPSD| 37054152 Drive Servo System
the noise is less or not much greater than the moment of the engine, it will immediately return to its original position. Figure 33:
Because the load parameter is too large than the moment of the engine, when there is
an impact load for a period of 2 to 4 seconds, the engine cannot return to its original position like Figure 32 =
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
142 71 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
107 54 -
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
136 68 -

Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
130 65