Bài giảng Thiết kế PID bằng tay Zigles Nichols | Trường Đại học Nông Lâm thành phố Hồ Chí Minh
Bài giảng Thiết kế PID bằng tay Zigles Nichols | Trường Đại học Nông Lâm thành phố Hồ Chí Minh. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Mạng lưới cấp nước 12 tài liệu
Trường: Trường Đại học Nông Lâm thành phố Hồ Chí Minh 210 tài liệu
Tác giả:
Preview text:
PID Controller PID CONTROLLER 1 PID Controller
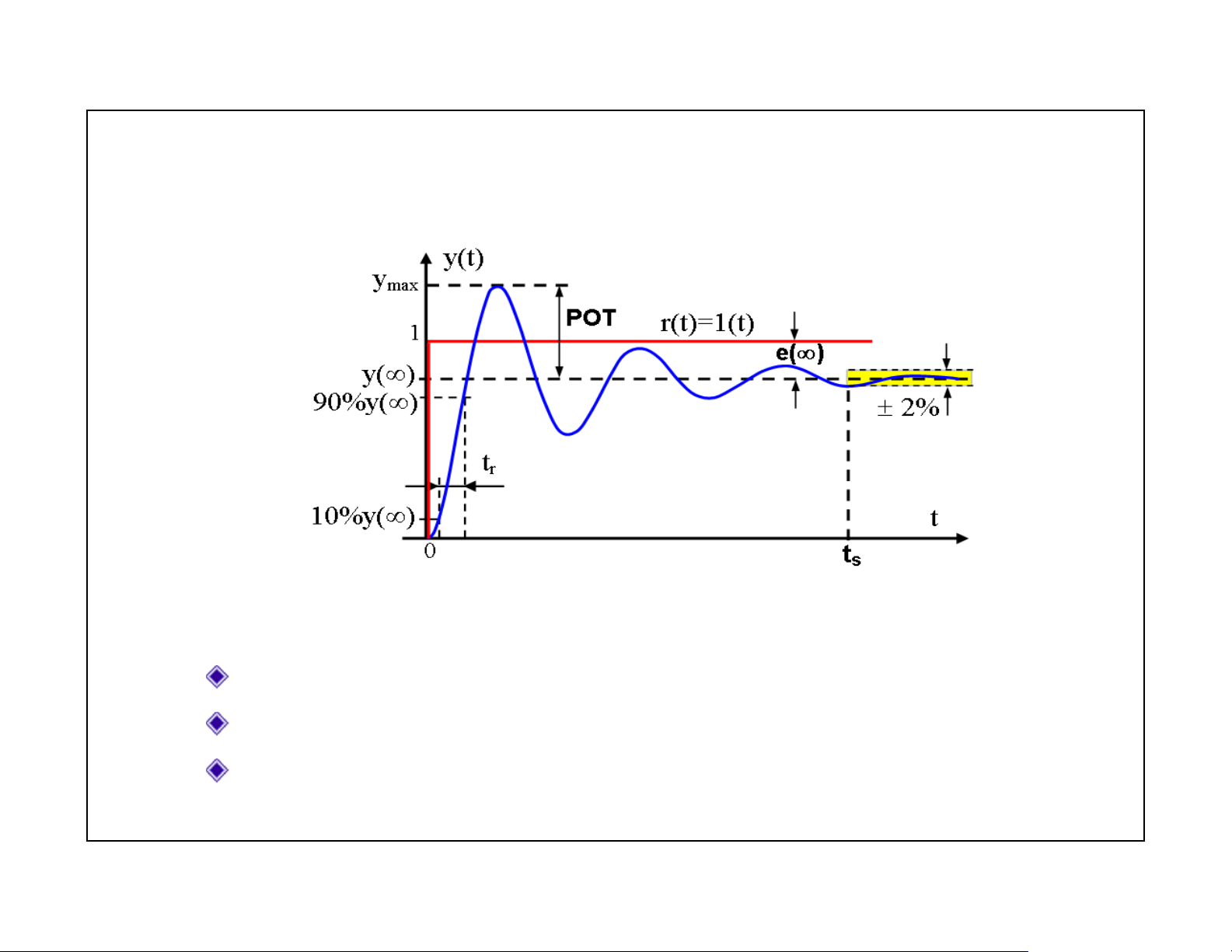
Mục tiêu ñiều khiển :
Triệt tiêu sai số xác lập.
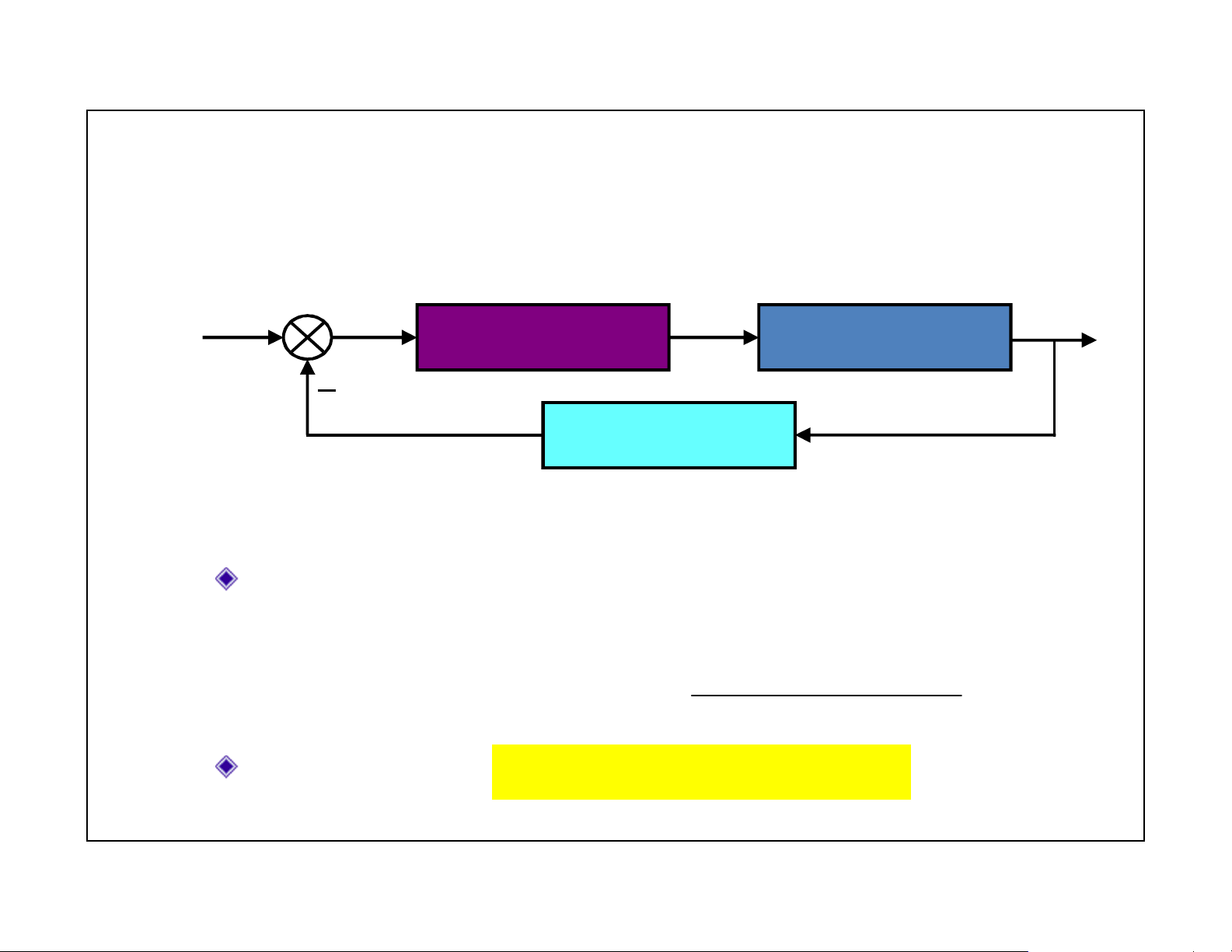
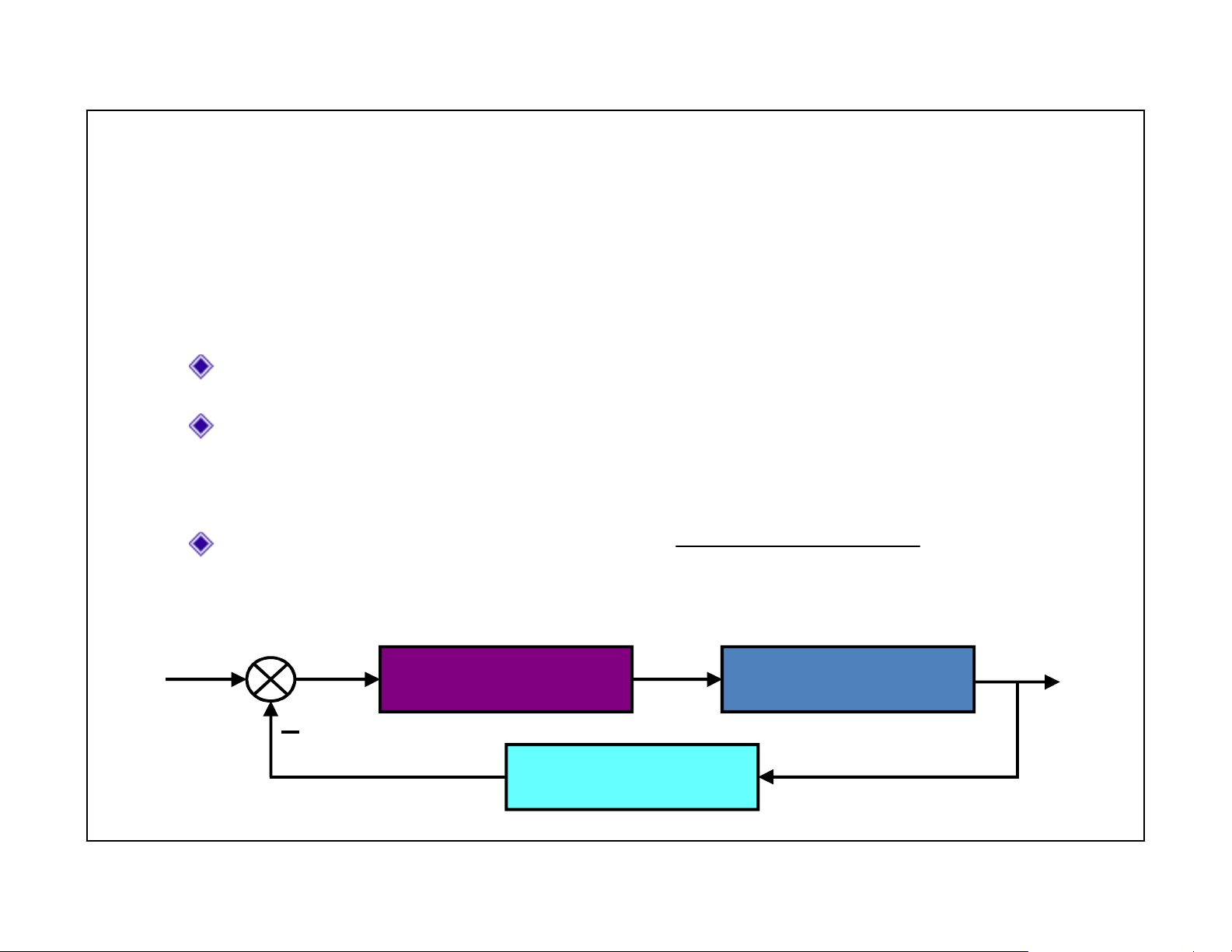
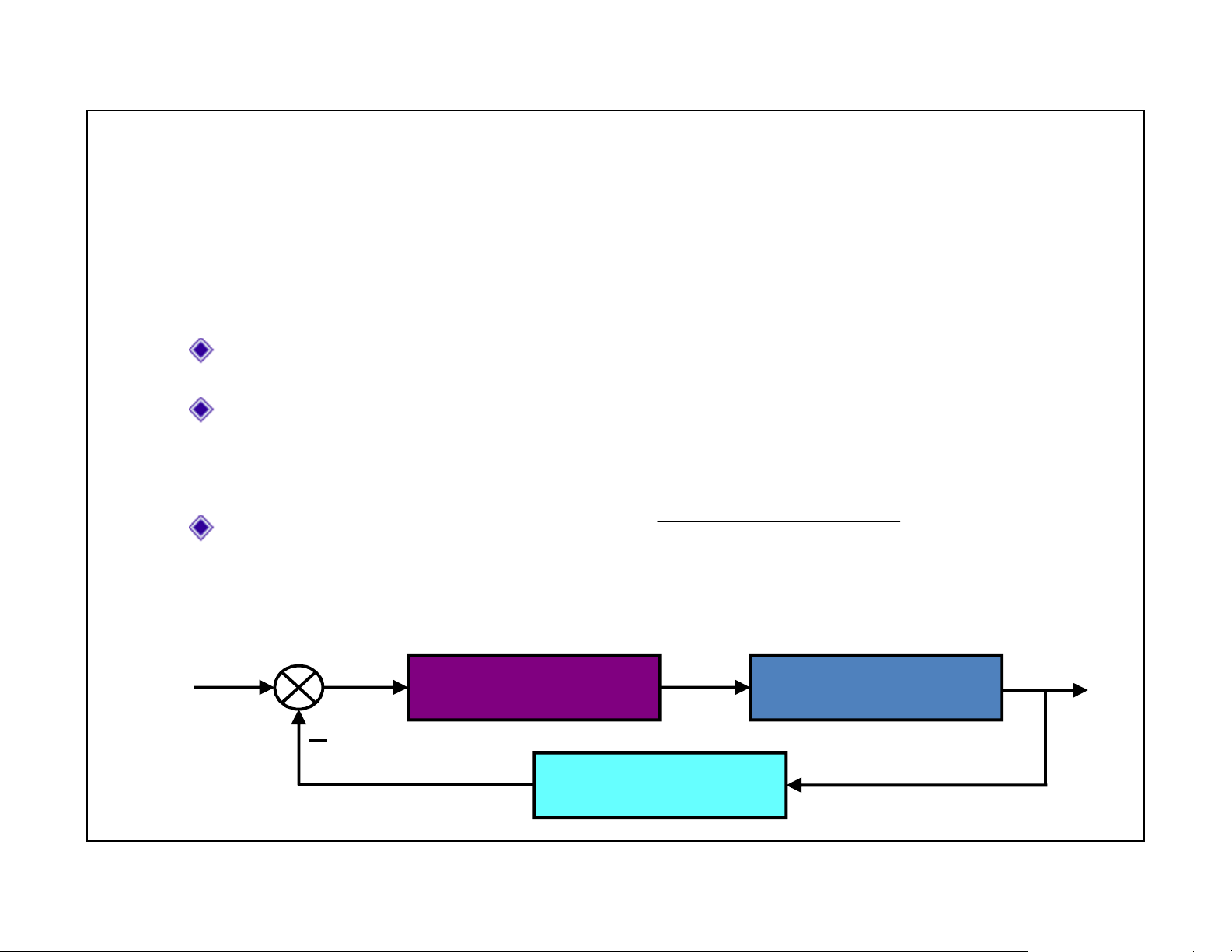
Giảm thời gian xác lập và ñộ vọt lố. Hạn chế dao ñộng. 2 PID Controller r(t) e(t) u(t) y(t) K(s) G(s) yht (t) H(s)
Chất lượng hệ thống : Sai số của hệ thống :
E (s) = R(s) − Y (s) H (s)
= R ( s) − E ( s) K ( s)G (s) H ( s) R (s)
⇒ E (s) = 1+ K (s)G(s)H (s) Sai số xác lập :
e(∞ ) = lim e(t) = lim s.E (s) t→ ∞ s→ 0 3 PID Controller Nhận xét :
Sai số xác lập không chỉ phụ thuộc vào cấu trúc và thông số của
hệ mà còn phụ thuộc vào tín hiệu vào.
Sai số xác lập phụ thuộc vào số lượng khâu lí tưởng có trong hàm truyền hở G(s)H(s) :
Hệ không có khâu tích phân : luôn có sai số xác lập.
1 khâu tích phân : e = 0 với tín hiệu vào là hàm nấc. xl
2 khâu tích phân : e = 0 với hàm dốc và hàm nấc. xl 3 khâu tích phân : e
= 0 với hàm dốc,hàm nấc và hàm xl parabol.
Hệ có n khau tích phân lí tưởng gọi là hệ vi sai bậc n. Sai số xác lập : 4 PID Controller
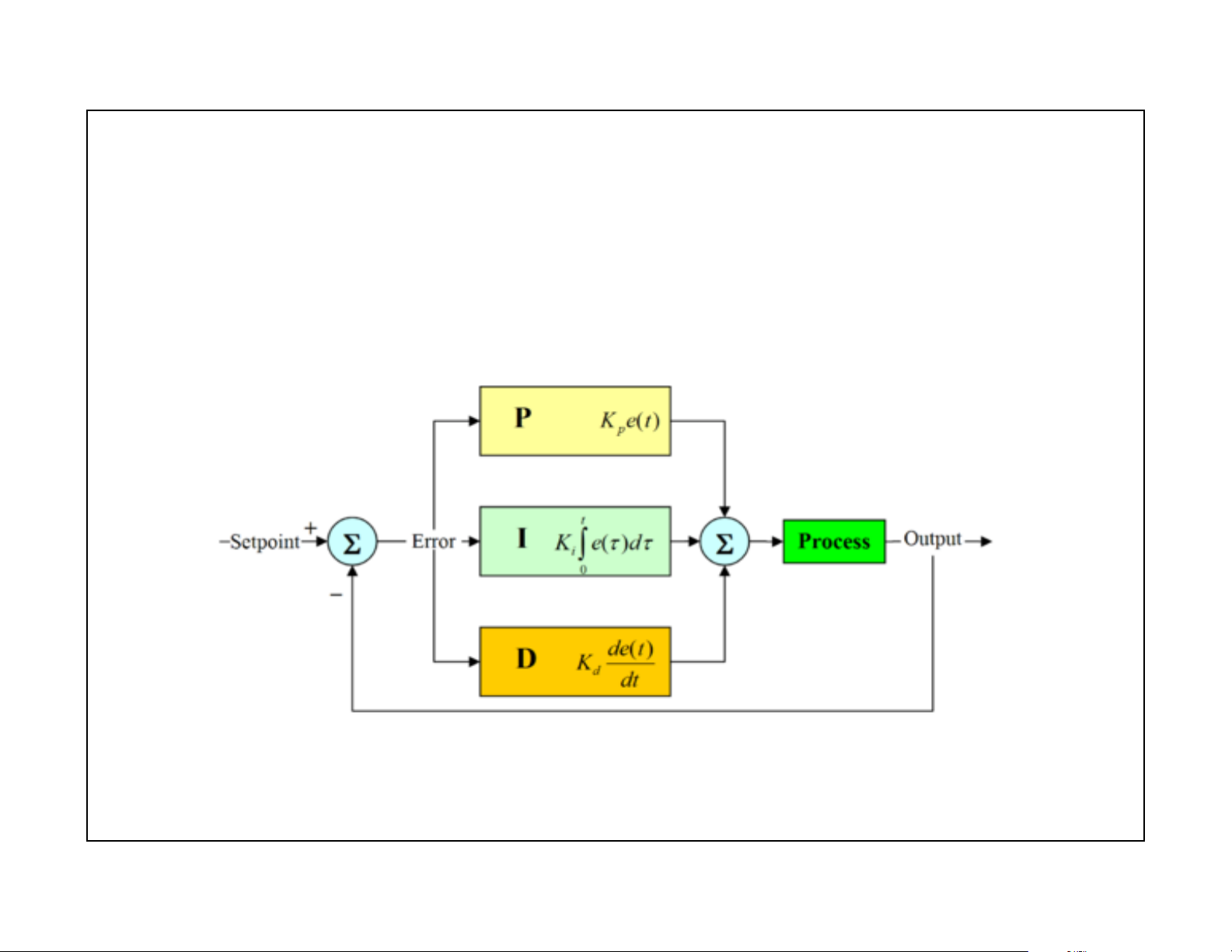
PID (Proportional Integral Derivative Controller ):
Bộ ñiều khiển hồi tiếp vòng kín ñược sử dụng nhiều nhất trong công nghiệp.
Là sự kết hợp của 3 bộ ñiều khiển : tỉ lệ, tích phân và vi phân.
Có khả năng làm triệt tiêu sai số xác lập, tăng tốc ñộ ñáp
ứng, giảm ñộ vọt lố nếu thông số của bộ ñiều khiển ñược lựa chọn thích hợp. 5 PID Controller
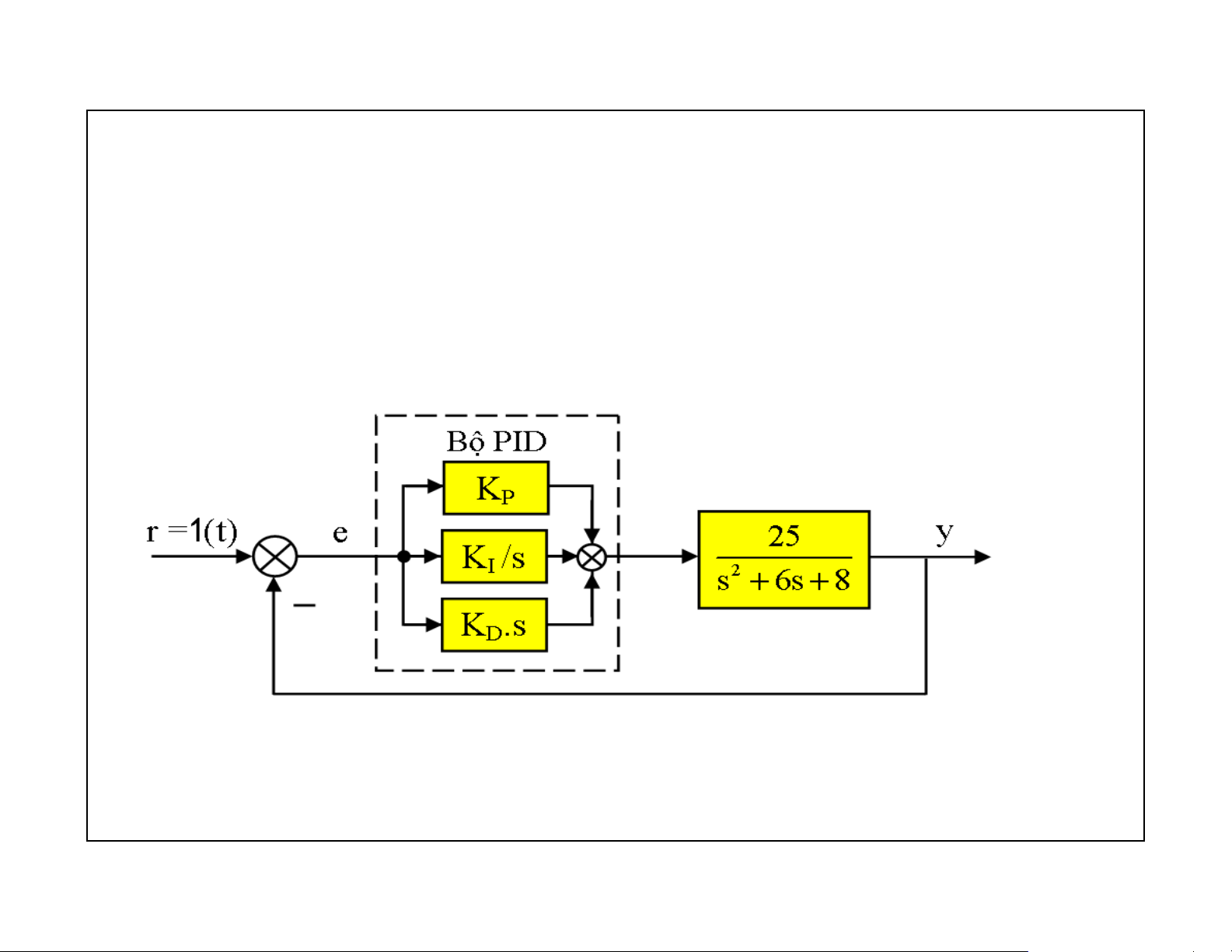
Bộ ñiều khiển PID liên tục : 6 PID Controller
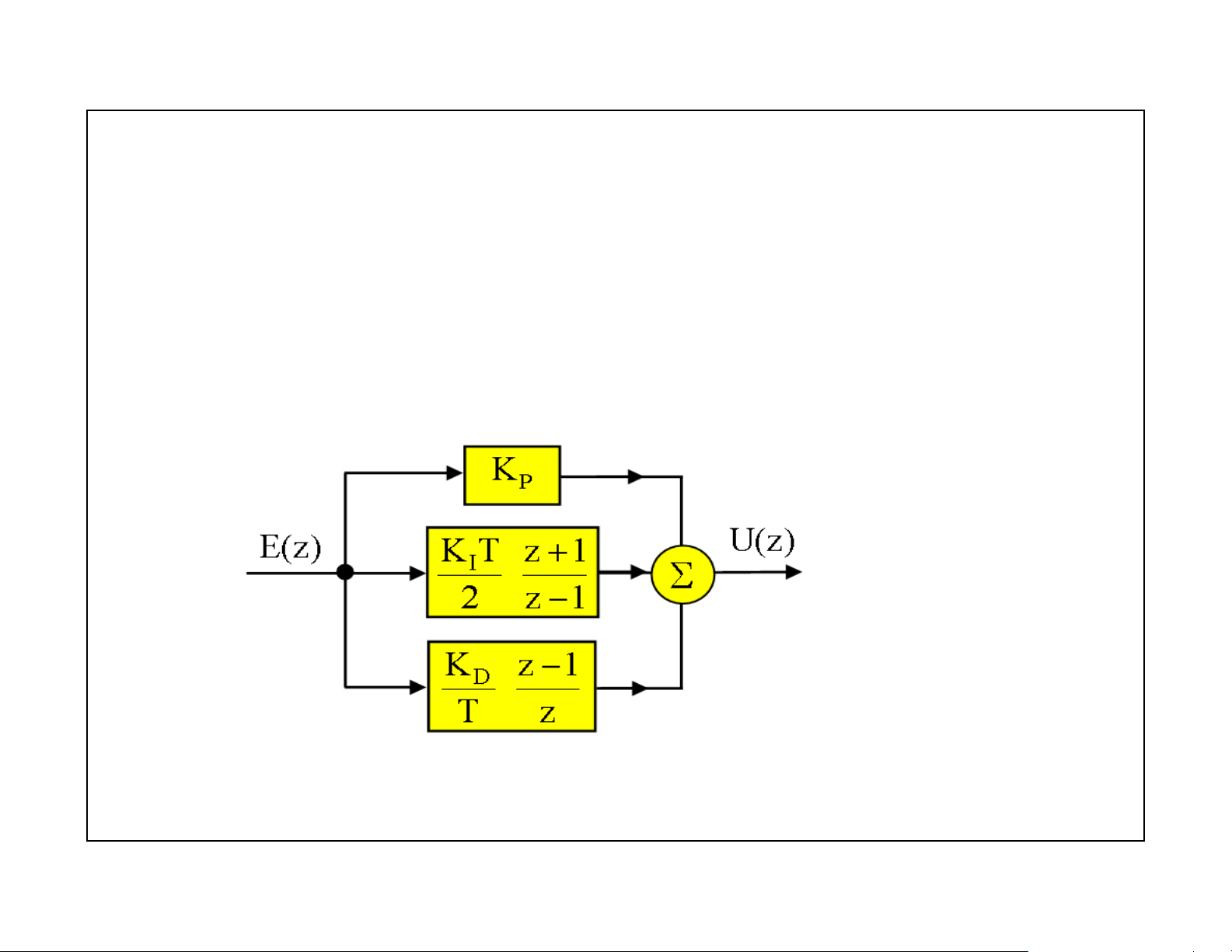
Bộ ñiều khiển PID số (rời rạc) : 7 PID Controller
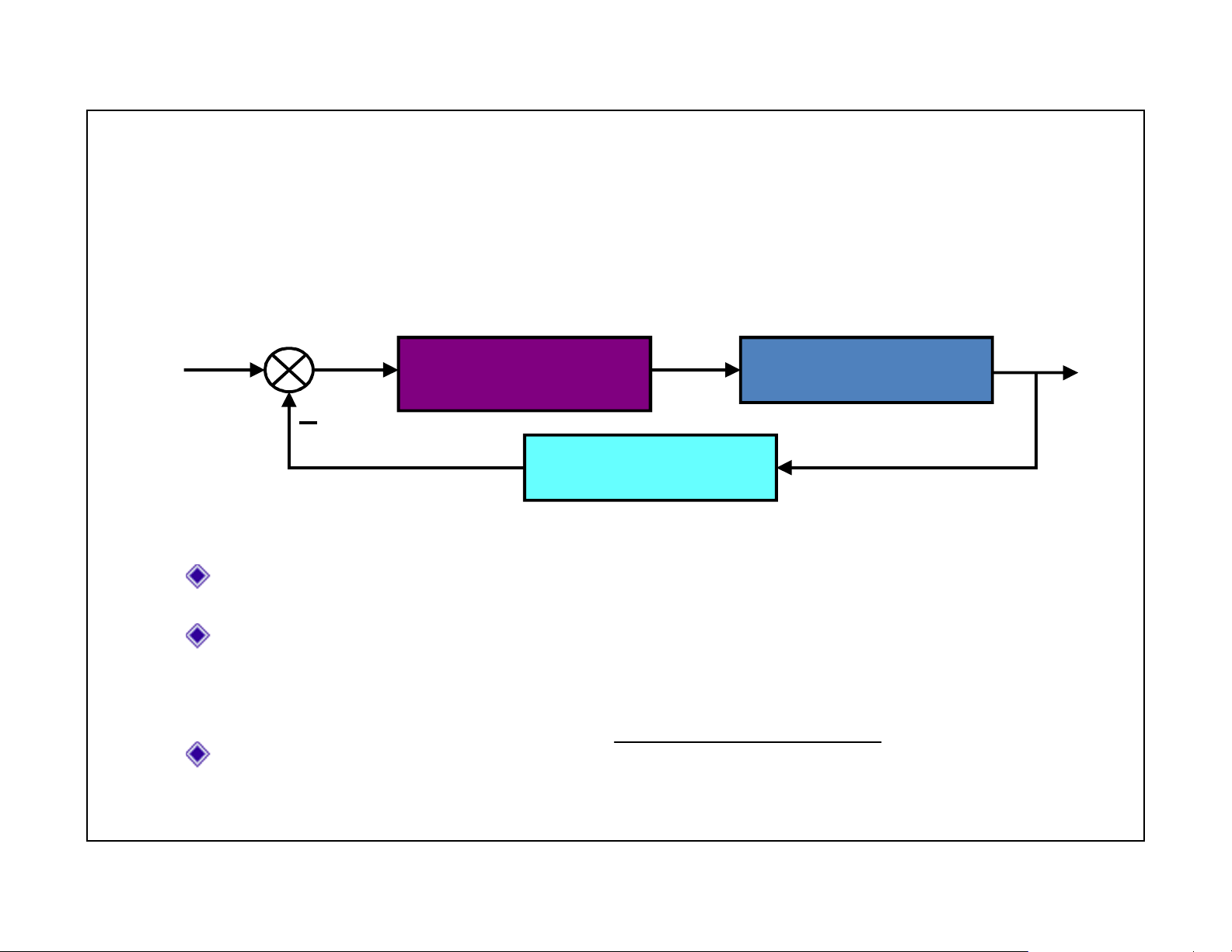
Khâu tỉ lệ (Proportional) : Hàm truyền : K(s) = K . P
ðặc tính thời gian : Y(s) = K .G(s).E(s). p R (s) Sai số hệ thống :
E ( s) = 1+ K G P (s)H ( s) r(t) e(t) u(t) y(t) K G(s) P yht (t) H(s) 8 PID Controller Nhận xét :
Kp càng lớn thì tốc ñộ ñáp ứng càng nhanh.
Kp càng lớn thì sai số xác lập càng nhỏ (nhưng không thể triệt tiêu).
Kp càng lớn thì các cực của hệ thống có xu hướng di chuyển
ra xa trục thực => Hệ thống càng dao ñộng và ñộ vọt lố càng cao.
Nếu Kp tăng quá giá trị giới hạn thì hệ thống sẽ dao ñộng
không tắt dần => mất ổn ñịnh. 9 PID Controller
Khâu tích phân (Integration) : Hàm truyền : K(s) = K /s. I
ðặc tính thời gian : Y(s) = K .G(s).E(s)/s. I s.R(s) Sai số hệ thống :
E (s) = s + K G I (s)H (s) r(t) e(t) u(t) y(t) K /s G(s) I yht (t) H(s) 10 PID Controller Nhận xét :
Tín hiệu ngõ ra ñược xác ñịnh bởi sai số.
K càng lớn thì ñáp ứng quá ñộ càng chậm. I
K càng lớn thì sai số xác lập càng nhỏ. ðặc biệt hệ số I
khuếch ñại của khâu tích phân bằng vô cùng khi tần số bằng
0 => triệt tiêu sai số xác lập với hàm nấc.
K càng lớn thì ñộ vọt lố càng cao. I 11 PID Controller
Khâu vi phân (Derivative) : r(t) e(t) u(t) y(t) KD.S G(s) yht (t) H(s) Hàm truyền : K(s) = K s. D.
ðặc tính thời gian : Y(s) = K .G(s).E(s).s. D R (s) E s = Sai số hệ thống : ( ) 1 + s.K G D (s)H (s) 12 PID Controller Nhận xét :
K càng lớn thì ñáp ứng quá ñộ càng nhanh. D
K càng lớn thì ñộ vọt lố càng nhỏ. D
Hệ số khuếch ñại tại tần số cao là vô cùng lớn nên khâu hiệu
chỉnh D rất nhạy với nhiễu tần số cao.
Khâu vi phân không thể sử dụng một mình mà phải dùng kết
hợp với các khâu P hoặc I. 13 Control System
Bộ ñiều khiển PID :
Kết hợp của ba khâu thành phần. Biểu diễn : Cách 1 : K s = K + K s + K s ( ) / . P I D Cách 2 : K (s) = K + + P 1 [
1 /(TI .s) TD .s] K Cách 3 : K (s) R = 1 ( + T .s 1 )( + T .s) 1 2 s 14 Control System
Các phương pháp tìm thông số PID (Kp, Ki, Kd) : Chỉnh ñịnh bằng tay.
Phương pháp Ziegler – Nichols.
Chỉnh ñịnh dùng phần mềm. Cohen-Coon. 15 Control System
Chỉnh ñịnh bằng tay :
ðặt Ki = Kd = 0. Tăng Kp ñến khi hệ thống dao ñộng tuần hoàn.
ðặt thời gian tích phân bằng chu kỳ dao ñộng .
ðiều chỉnh lại giá trị Kp cho phù hợp.
Nếu có ñao ñộng thì ñiều chỉnh giá trị Kd. 16 Control System
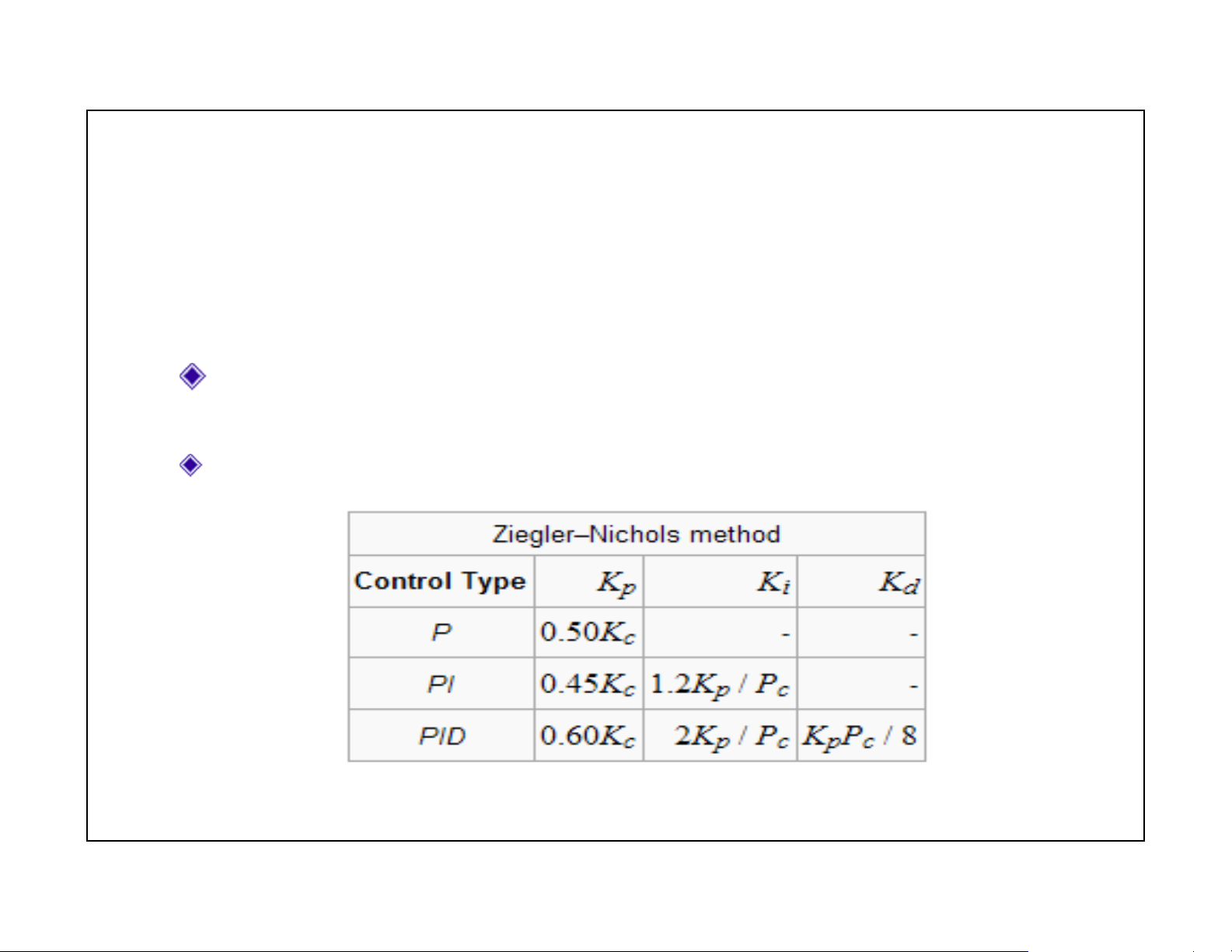
Phương pháp Ziegler-Nichols :
ðặt Ki = Kd = 0. Tăng Kp ñến khi hệ thống dao ñộng tuần hoàn. ðặt giá trị Kp này = Kc ðo chu kì dao ñộng Pc. 17 Control System
Chỉnh ñịnh bằng phần mềm :
Dùng phần mềm ñể tự ñộng chỉnh ñịnh thông số PID (thực hiện
trên mô hình toán, kiểm nghiệm trên mô hình thực).
Ví dụ dùng giải thuật di truyền (GA) ñể tìm thông số sao cho sai
số ño ñược nhỏ hơn giá trị yêu cầu. 18
Tài liệu liên quan:
-

Hệ Thống Mật Thư Cùng Với Giải Mật Thư: Kỹ Năng Truyền Tin
58 29 -
Tiêu chuẩn Thiết Kế Cấp Nước - Mạng Lưới & Công Trình | Mạng lưới cấp nước | Đại học Nông Lâm Thành phố Hồ Chí Minh
150 75 -

Môn học đồ án mạng lưới cấp thoát nước | Mạng lưới cấp nước | Đại học Nông Lâm Thành phố Hồ Chí Minh
66 33 -

Cấp thoát nước trong nông nghiệp: Hiện Trạng và Phân Loại Hệ Thống | Mạng lưới cấp nước | Đại học Nông Lâm Thành phố Hồ Chí Minh
80 40