Báo cáo đồ án môn học hệ thống điều khiển tự động - Đề tài: Điều khiển PID số cho hệ bồn nước đơn | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Hiện nay, sự công nghiệp hóa hiện đại hóa ngày càng phát triển mạnh mẽ, sự tiếng bộ của khoa học kỹ thuật, trong đó kỹ thuật điều khiển tự động cũng góp phần rất lớn tạo điều kiện để nâng cao hiệu quả trong quá trình sản xuất.Trong các ngành công nghiệp sản xuất chất lỏng như hóa chất, nước uống đóng chai, sữa, dầu ăn,…vấn đề cần điều khiển mức,Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Tự động điều khiển (Automotive Engineerings) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:









Preview text:
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN TỰ ĐỘNG ĐIỀU KHIỂN
-----------------⸙∆⸙-----------------
BÁO CÁO ĐỒ ÁN MÔN HỌC
HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
Đề tài: Điều khiển PID số cho hệ bồn nước đơn
GVHD: TS. Ngô Văn Thuyên SVTH MSSV
Phan Hoàng Phát 20151534
Tp. Hồ Chí Minh tháng 6 năm 2023 MỤC LỤC
CHƯƠNG 1 TỔNG QUAN HỆ THỐNG ỔN ĐỊNH MỨC NƯỚC...................7
1.1 Sự cần thiết ổn định mức nước..................................................................7
1.2 Ứng dụng của hệ thống ổn định mức nước..............................................7
CHƯƠNG 2 CƠ SỞ LÍ THUYẾT.........................................................................7
2.1 Đặt bài toán điều khiển mức nước............................................................7
2.2 Mô hình toán học bồn chứa chất lỏng.......................................................9
CHƯƠNG 3 THIẾT KẾ PHẦN CỨNG................................................................9
3.1 yêu cầu thiết kế:.............................................................................................9
3.2 sơ đồ khối.....................................................................................................10
3.3 lựa chon thiết bị...........................................................................................11
3.3.1 lựa chon cảm biến.......................................................................................11
3.3.2 lựa chon nguồn...........................................................................................12
3.3.3 hiển thị........................................................................................................13 3.3.4
lựa chon cơ cấu chấp hành....................................................................14
a) Động cơ................................................................................................14
b) Mạch cầu H L298N..............................................................................15
3.3.5 lựa chon MCU............................................................................................16
3.4 Sơ đồ nối dây tổng thể.................................................................................18
CHƯƠNG 4 THIẾT KẾ PHẦN MỀM................................................................18
4.1 Yêu cầu thiết kế...........................................................................................18
4.2 Giải thuật......................................................................................................19
4.3 Chương trình...............................................................................................20
4.4 Bộ điều khiển PID rời rạc........................................................................22
CHƯƠNG 5 KẾT QUẢ THỰC NGHIỆM..........................................................23
5.1 Xây dựng mô hình.......................................................................................23 a)
Chuẩn bị vật liệu và linh kiện:..............................................................24 b)
Lắp ráp linh kiện:..................................................................................24 c)
Lập trình:..............................................................................................24 d)
Kiểm tra và điều chỉnh:........................................................................24
5.2 kết quả thực nghiệm.................................................................................25 5.2.1
Điều kiện thử nghiệm...........................................................................25
a) Điều kiện ban đầu:................................................................................25
b) Thử nghiệm chức năng cảm biến:........................................................25
c) Thử nghiệm chức năng điều khiển:......................................................25
d) Đánh giá hiệu năng:..............................................................................25 5.2.2
Kết quả..................................................................................................26
Tài liệu tham khảo..................................................................................................28 DANH MỤC Ả
Hình 2.1 Mô hình hệ thống bồn nước.......................................................................8
Hình 2.2 mô hình bồn chứa.......................................................................................9 Y
Hình 3.1 Sơ đồ tổng quan về bồn nước...................................................................11
Hình 3.2 cảm biến HC-SR04...................................................................................11
Hình 3.3 nguồn 12V5a............................................................................................12
Hình 3.4 LCD 2x16.................................................................................................13
Hình 3.5 bơm nước 365DC 12V.............................................................................14
Hình 3.6 Mạch cầu H L298.....................................................................................15
Hình 3.7 Arduino Mega2560...................................................................................16
Hình 3.8 Sơ đồ nối dây tổng thể..............................................................................18
Hình 4.1 Chương trình giải thuật............................................................................19
Hình 4.2 Hệ thống bộ điều khiển PID rời rạc..........................................................22
Hình 4.3 Khối thành phần bộ điều khiển PID rời rạc..............................................22
Hình 5.1 Mô hình thực tế........................................................................................23
Hình 5.2 kết quả 1..................................................................................................26
Hình 5.3 Kết quả 2..................................................................................................26
PHỤ LỤC CHƯƠNG TRÌNH #include #include #include
LiquidCrystal_I2C lcd(0x27,16,2); #define TRIG_PIN 7 #define ECHO_PIN 6 #define TIME_OUT 5000 int ena = 10; int in1 = 9; int in2 = 8; double h; double h_init;
double E,E1,E2,alpha,beta,gamma; double Kp,Kd,Ki; double T; volatile double Output = 0; double LastOutput=0; float GetDistance() { double duration, distance; digitalWrite(TRIG_PIN,LOW); delayMicroseconds(2); digitalWrite(TRIG_PIN,HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN,LOW);
duration = pulseIn (ECHO_PIN, HIGH, TIME_OUT);
distance = (duration / 2 / 29.412); return distance; } void PID() { double x = GetDistance(); h_init = 23.7 - x; E = h - h_init;
alpha = 2*T*Kp + Ki*T*T + 2*Kd;
beta = T*T*Ki - 4*Kd - 2*T*Kp; gamma = 2*Kd;
Output = (alpha*E + beta*E1 + gamma*E2 + 2*T*LastOutput)/ (2*T); LastOutput = Output; E2=E1; E1=E; //if(Output>255) //Output=255; //if(Output<0) //Output=0; if(h_init < h) { analogWrite(ena,255); digitalWrite(in1,HIGH); digitalWrite(in2,LOW); } if(h_init >= h) { analogWrite(ena, 0); digitalWrite (in1, LOW); digitalWrite (in2, LOW); } Serial.println(h_init); } void setup() { Serial.begin(9600); pinMode(TRIG_PIN, OUTPUT); pinMode(ECHO_PIN, INPUT); pinMode(ena, OUTPUT); pinMode (in1, OUTPUT); pinMode (in2, OUTPUT); lcd.begin(); lcd.backlight(); Kp=10; Kd=0.01; Ki=0.1; E=0; E1=0; E2=0;; h=6; T=0.1; Timer1.initialize(100000); Timer1.attachInterrupt(PID); } void loop() { lcd.setCursor(0,0); lcd.print("GIA TRI DAT:"); lcd.setCursor(13,0); lcd.print(h); lcd.setCursor(0,1); lcd.print("MUC NUOC:"); lcd.setCursor(11,1); lcd.print(h_init); }
CHƯƠNG 1 TỔNG QUAN HỆ THỐNG ỔN ĐỊNH MỨC NƯỚC
1.1 Sự cần thiết ổn định mức nước
Hiện nay, sự công nghiệp hóa hiện đại hóa ngày càng phát triển mạnh mẽ, sự
tiếng bộ của khoa học kỹ thuật, trong đó kỹ thuật điều khiển tự động cũng góp
phần rất lớn tạo điều kiện để nâng cao hiệu quả trong quá trình sản xuất.
Trong các ngành công nghiệp sản xuất chất lỏng như hóa chất, nước uống
đóng chai, sữa, dầu ăn,…vấn đề cần điều khiển mức, lưu lượng dòng chảy cần
đáp ứng với độ chính xác cao để phục vụ quá trình xuất đặt hiệu quả tốt hơn, đảm
bảo quá trình sản xuất các chất lỏng không bị gián đoạn, tang tuổi thọ thiết bị.
Người vận hành không cần phải trược tiếp kiểm tra trong các bồn chứa hoặc đóng
mở bơm liên tục, vấn đề bị cạn hay tràn trong bồn chứa chất lỏng hoàn toàn được
khắc phục cho dù đầu ra thay đổi. Chính vì vậy chúng ta cần thiết phải “ Ổn định mức nước ”.
1.2 Ứng dụng của hệ thống ổn định mức nước
Hệ thống ổn định mức nước được ứng dụng nhiều trong các lĩnh vực công
nghiệp, nông nghiệp, ở nhiều công ty, xí nghiệp và các nhà máy như: công
nghiệp hóa lọc dầu, công nghiệp hóa chất, công nghiệp xử lý nước, sản xuất giấy,
sản xuất điện năng, bể chứa nước thải…Ứng dụng kiểm soát mức nước điều
chỉnh mức nước trong bể để giảm lượng nước thừa trong bể. Ngoài ra hệ thống
này còn tăng khả năng điều chỉnh của bể, để đảm bảo đầu ra ổn định tới hệ thống
nước thải và xử lí nước thải.
Có nhiều phương pháp để giám sát và quản lý chất lỏng như: phương pháp thủ
công, phương pháp tự động hóa. Và hiện nay phần lớn đều sử dụng phương pháp
tự động hóa nhằm giảm bớt lao động con người, tăng hiệu quả sản xuất về kinh
phí cũng như độ chính xác
Hệ thống ổn định mức nước được ứng dụng trong một số ứng dụng cụ thể như sau:
- Lĩnh vực sản xuất điện Nhiệt điện Điện hạt nhân Thủy điện
- Lĩnh vực xử lí nước thải
- Nhà máy sản xuất nước
- Công nghiệp lọc hóa dầu, tháp nước tự động, trạm bơm nước lớn
CHƯƠNG 2 CƠ SỞ LÍ THUYẾT
2.1 Đặt bài toán điều khiển mức nước
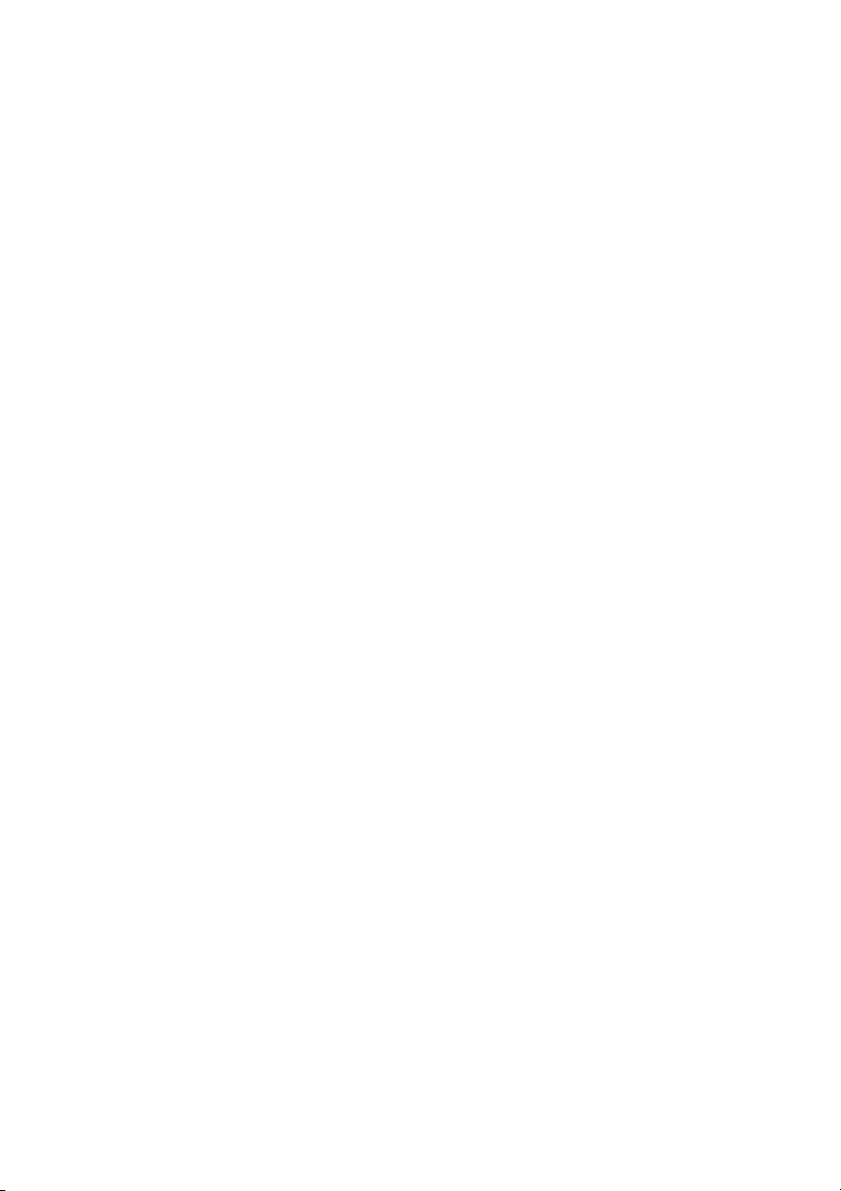
Cấu trúc của hệ thống ổn định mức nước nghiên cứu trong đề tài như hình vẽ sau:
Hình 2.1 Mô hình hệ thống bồn nước
Nguyên lý làm việc của mô hình là: Nước từ bồn chứa được động cơ bơm vào
bồn điều khiển, lưu lượng nước được thay đổi qua van điều chỉnh đầu vào. Mức
nước trong bồn được cảm biến mức do và đưa thông tin tới bộ điều khiển. Đầu
ra của bồn điều khiển là van xả chất lỏng ra bên ngoài có thể điều chỉnh góc mở
thể hiện mức độ tiêu thụ là luôn thay đổi và không cố định. Bộ điều khiển có
nhiệm vụ điều chỉnh góc mở van xả chất lỏng vào sao cho giữ được mức nước
trong bồn điều khiển ổn định theo giá trị đặt sẵn.
Hệ thống phải được lập trình sao cho mức nước trong bồn luôn ổn định mà
không phụ thuộc vào lượng tiêu thụ.
Xây dựng chương trình và đánh giá hiệu quả của các bộ điều khiển bằng
phần mềm Arduino IDE cho hệ thống bồn nước.
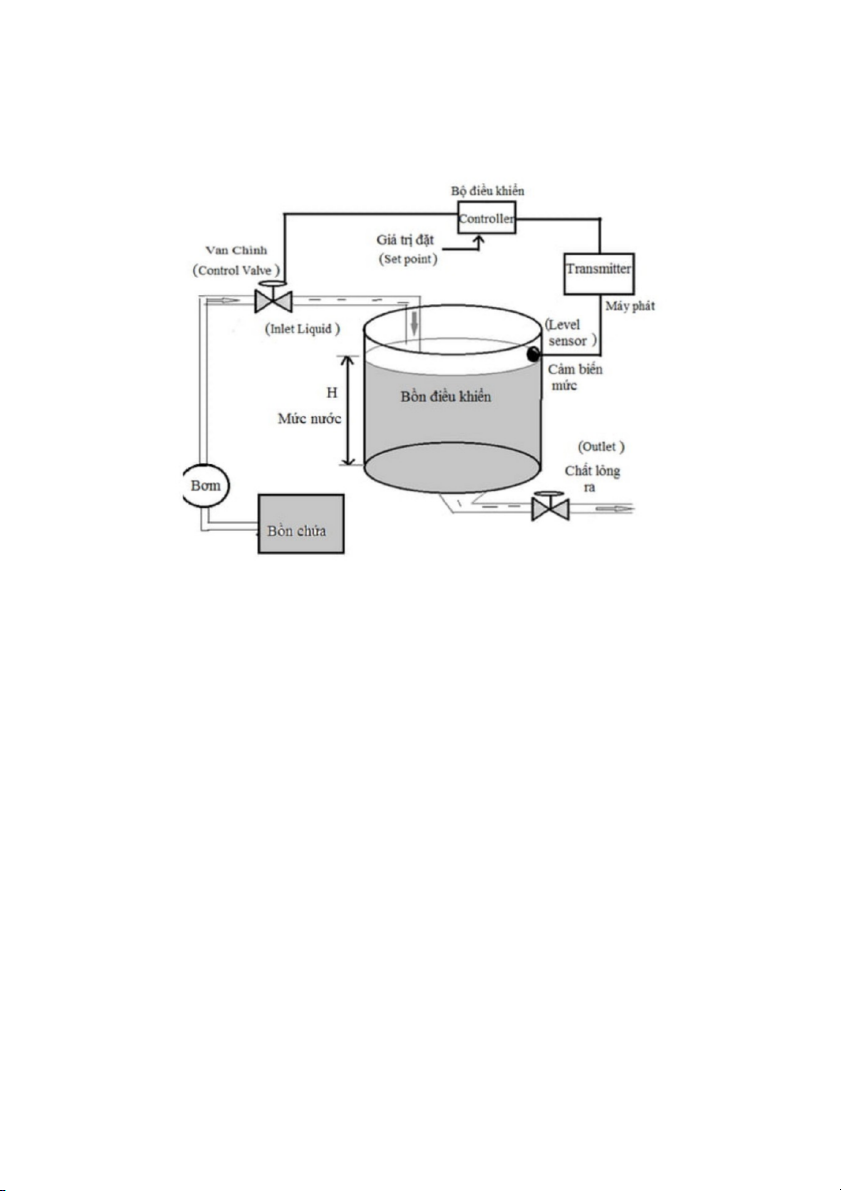
2.2 Mô hình toán học bồn chứa chất lỏng
Hình 2.2 mô hình bồn chứa
d Ah(t) q
(t) q (t) in out
Phương trình cân bằng: dt q (t) k u(t) Dòng vào : in 2 2 2 2 q (t) a C p(t) out D Dòng ra: Trong đó:
A: tiết diện ngang bồn chứa a: tiết diện van xả
k: hệ số tỉ lệ với công suất máy bơm ( p t) g ( h t) C 0 .6 D
Phương trình vi phân mô tả hệ thống bồn nước đơn. 1
h(t) ku(t) aC 2gh(t) D A
CHƯƠNG 3 THIẾT KẾ PHẦN CỨNG
3.1 yêu cầu thiết kế: Dung tích:
Bể chứa nước 15x15x25 = 5,5 (đơn vị: lít). Dung tích dựa trên nhu cầu sử
dụng và không gian có sẵn. Ứng dụng:
Hệ thống sử dụng để duy trì mức nước ổn định trong một không gian nhất định.
Mục tiêu chính của hệ thống là giữ cho mức nước trong khoảng giới hạn giá
trị đặt đã xác định và ngăn chặn sự tràn hoặc thiếu nước.
Hệ thống phải có khả năng duy trì mức nước ổn định trong suốt quá trình sử
dụng và đối phó với các yếu tố bên ngoài như thời tiết hay tác động từ người sử dụng. Sai số:
Sai số trong việc duy trì mức nước phải được giữ ở mức tối thiểu và không
vượt quá ngưỡng cho phép. sai số cho phép trong khoảng từ 0.2cm đến 0.5cm.
Hệ thống phải đáp ứng các yêu cầu chính xác về mức nước được xác định
trước đó và không được vượt quá ngưỡng sai số ở trên. Công suất:
Hệ thống cần có công suất đủ để duy trì mức nước ổn định trong dung tích đã đề ra (5,5 lít)
tốc độ duy trì mức nước mong muốn: 2-3 lít / phút
Công suất của hệ thống được tính toán dựa trên mức tiêu thụ nước và tốc độ
duy trì mức nước mong muốn. Điều khiển:
Hệ thống cần được trang bị các cảm biến và bộ điều khiển để giám sát và điều chỉnh mức nước.
Cảm biến nước được đặt trong hồ chứa hoặc không gian chứa nước để theo
dõi mức nước hiện tại và cung cấp thông tin cho bộ điều khiển.
Bộ điều khiển sẽ đọc dữ liệu từ cảm biến và điều chỉnh hệ thống, bao gồm
việc bơm nước vào hoặc ra khỏi hệ thống để duy trì mức nước ổn định. 3.2 Sơ đồ khối
Hình 3.1 Sơ đồ tổng quan về bồn nước
Mô tả sơ đồ khối của hệ thống ổn định mức nước bao gồm 5 phần:
- Máy tính giao tiếp với khối điều khiển:
Máy tính chịu trách nhiệm thu thập thông tin và giao tiếp với hệ thống.
Nó có thể là một máy tính trung tâm hoặc một vi điều khiển thông minh
được lập trình để điều khiển các phần khác của hệ thống.
- Khối điều khiển:
Đây là trung tâm điều khiển của hệ thống ổn định mức nước.
Nhiệm vụ của khối điều khiển là nhận tín hiệu từ máy tính và các cảm biến
để quản lý hoạt động của hệ thống.
Nó điều khiển các hoạt động của bơm và xử lý dữ liệu từ cảm biến để duy trì
mức nước ổn định trong bồn nước. - Bơm:
Bơm được sử dụng để bơm nước vào bồn nước để điều chỉnh mức nước.
Hoạt động của bơm được điều khiển bởi khối điều khiển.
Khi mức nước quá thấp, bơm sẽ được kích hoạt để bơm nước vào bồn. - Bồn nước:
Bồn nước là nơi chứa nước trong hệ thống.
Mức nước trong bồn được đo bằng cảm biến siêu âm và truyền dữ liệu về
khối điều khiển để đánh giá và điều chỉnh mức nước.
- Cảm biến siêu âm:
Cảm biến siêu âm được sử dụng để đo mức nước trong bồn.
Nó phát ra tín hiệu siêu âm và nhận lại tín hiệu phản xạ từ bề mặt nước.
Dựa vào thời gian mà tín hiệu siêu âm đi và trở lại, cảm biến có thể tính toán
được khoảng cách từ mặt nước đến cảm biến, từ đó xác định mức nước hiện tại trong bồn. 3.3 Lựa chon thiết bị
3.3.1 Lựa chon cảm biến
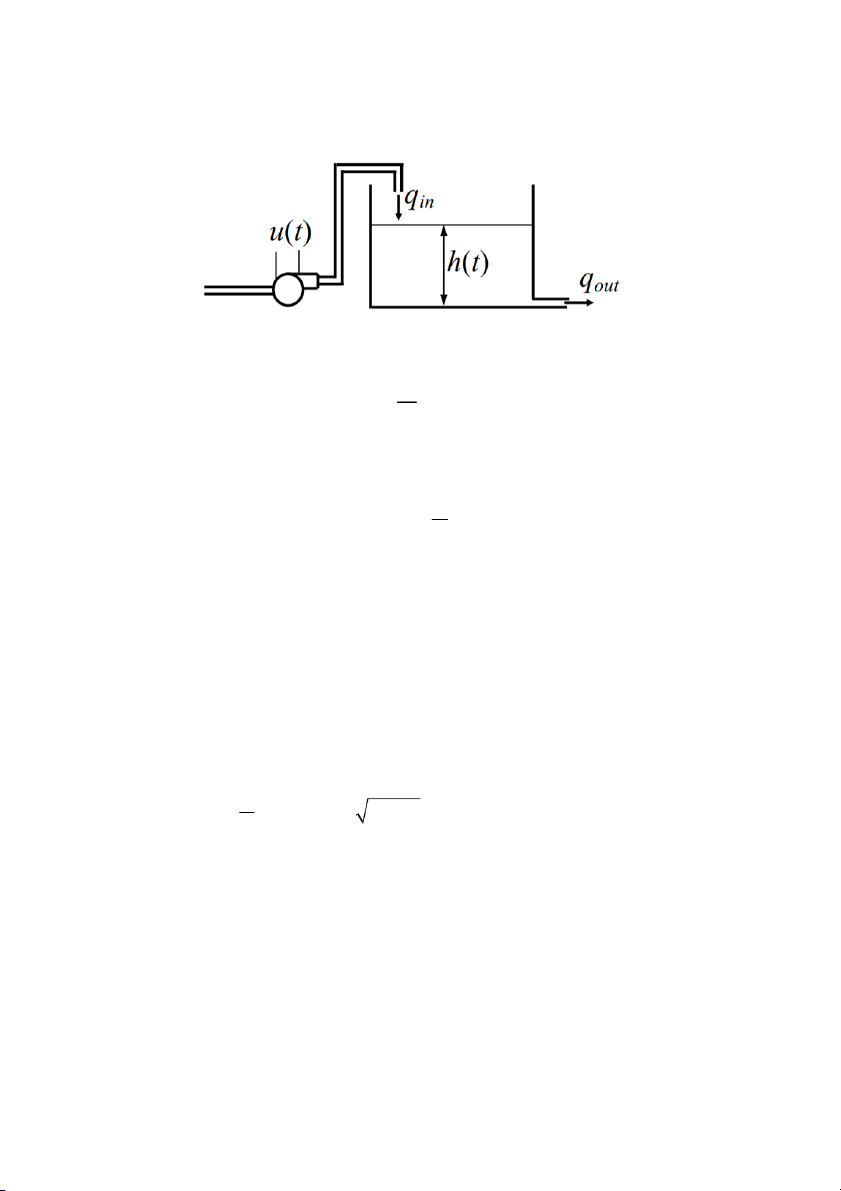
Hình 3.2 cảm biến HC-SR04
Từ yêu cầu thiết kế cảm biến siêu âm được sử dụng là HC-SR04 dựa theo các tiêu chí quan trọng sau đây:
Kích thước nhỏ gọn:
Cảm biến HC-SR04 có kích thước nhỏ gọn, điều này giúp dễ dàng tích hợp
vào hệ thống ổn định mức nước mà không chiếm quá nhiều không gian.
Điều này rất quan trọng trong các ứng dụng có không gian hạn chế, như
trong bể nước hoặc các hệ thống tưới cây.
Sử dụng điện áp 5V:
Cảm biến HC-SR04 hoạt động với điện áp 5V, điều này tương thích với hầu
hết các hệ thống điện tử thông dụng hiện có.
Việc sử dụng điện áp 5V giúp đơn giản hóa việc cung cấp điện cho cảm biến
và tích hợp nó vào hệ thống một cách dễ dàng.
Sai số trong khoảng từ 0.2cm đến 0.5cm:
Cảm biến HC-SR04 có sai số là 0.3, có nghĩa là kết quả đo của cảm biến có độ chính xác khá cao.
Sai số nhỏ giúp đảm bảo rằng mức nước được đo và kiểm soát trong hệ
thống sẽ gần như chính xác, đồng thời giảm thiểu khả năng xảy ra sai sót và
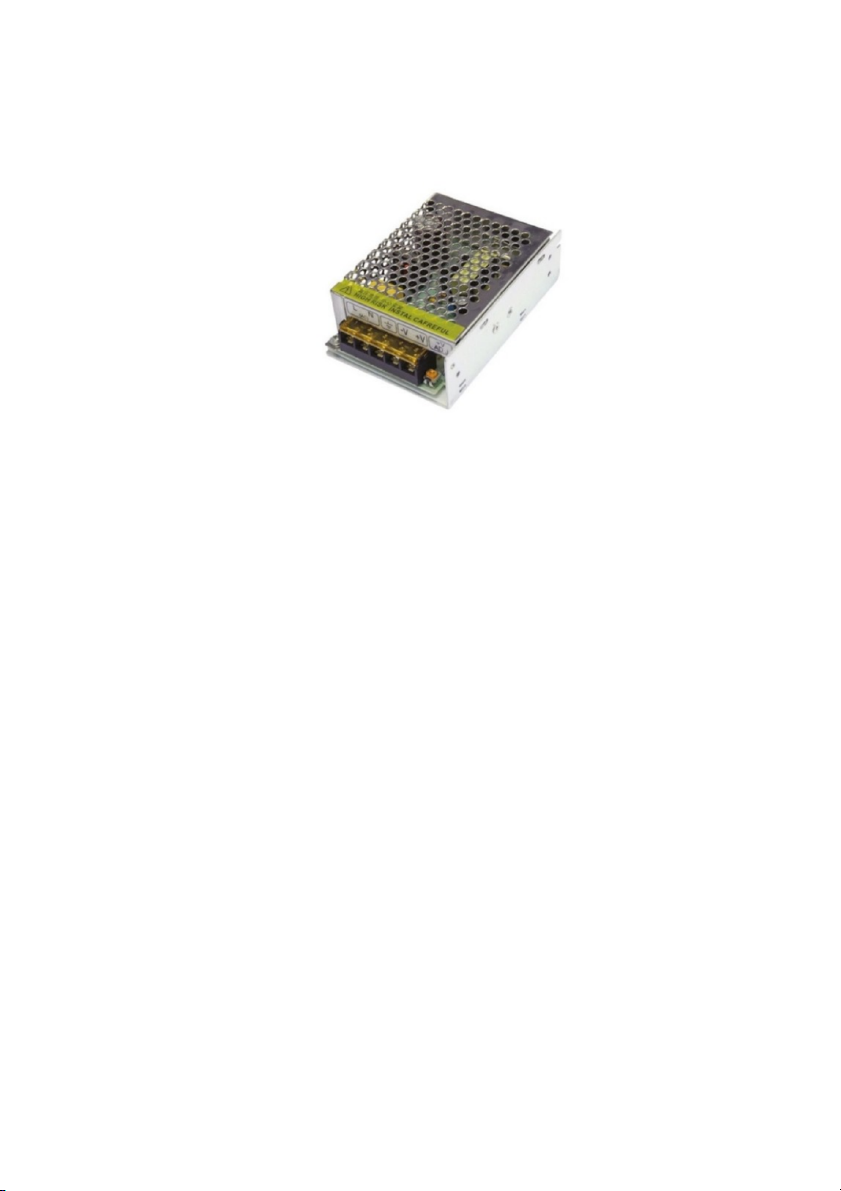
các vấn đề liên quan đến đo lường. 3.3.2 Lựa chọn nguồn Hình 3.3 nguồn 12V5A
Lựa chọn nguồn tổ ong 12V5A cho hệ thống ổn định mức nước dựa trên các lí do sau đây:
Điện áp làm việc: Chỉnh lưu từ lưới điện xoay chiều thành điện 1 chiều. Nguồn tổ
ong 12V5A cung cấp điện áp ra12VDC, phù hợp với yêu cầu điện áp của hệ thống.
Điều này đảm bảo khớp nối tương thích giữa nguồn điện và các thiết bị trong hệ thống.
Công suất và dòng điện: Nguồn tổ ong 12V5A có công suất 60W và dòng điện tối
đa là 5A. Điều này cung cấp đủ công suất và dòng điện để cung cấp năng lượng
cho động cơ bơm nước và các thành phần khác trong hệ thống.
Nhỏ gọn và dễ lắp đặt: Nguồn tổ ong có thiết kế nhỏ gọn, tiết kiệm không gian và
dễ dàng lắp đặt trong hệ thống. Điều này giúp tiết kiệm không gian và thuận tiện
cho việc gắn kết và kết nối với các thành phần khác.
Ổn định và bảo vệ: Nguồn tổ ong 12V5A thường được thiết kế với các tính năng
cung cấp dòng áp đủ tranh trường hợp sụt áp, dòng ảnh hưởng tới mạch. Điều này
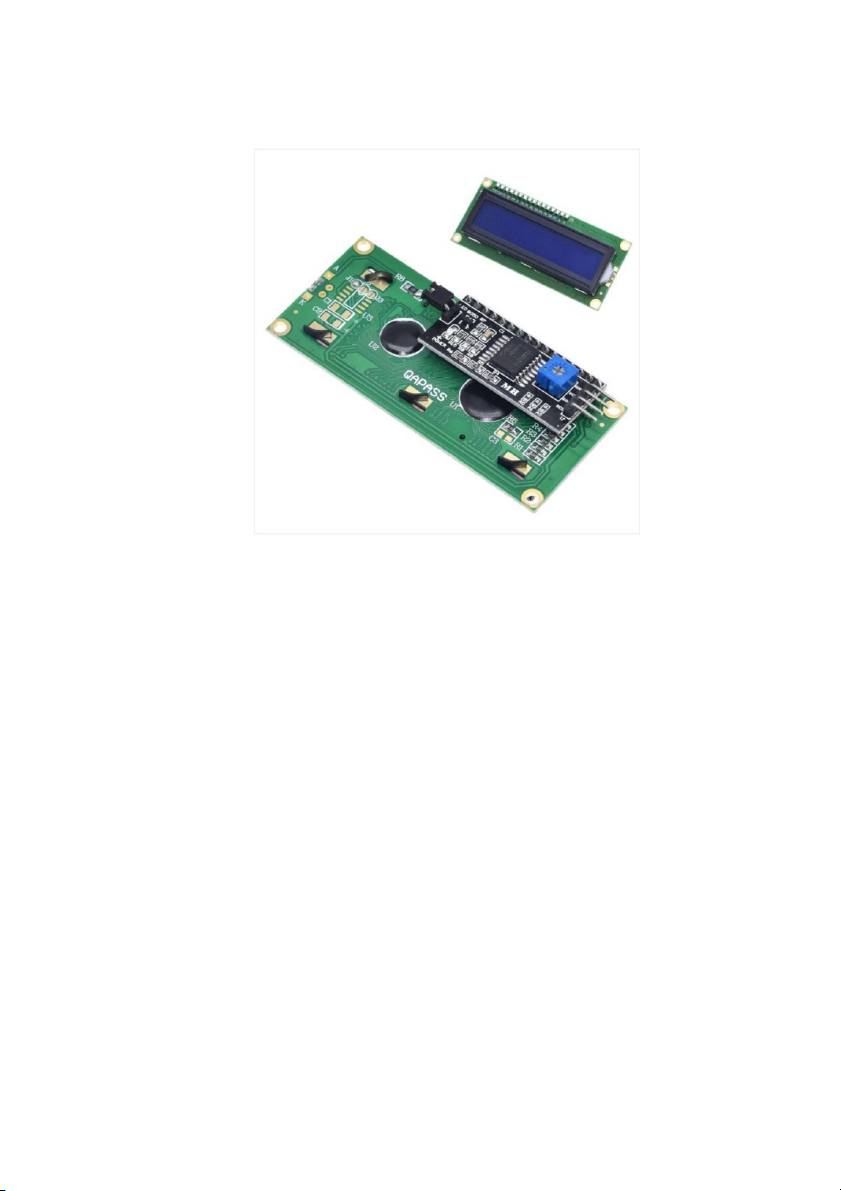
giúp bảo vệ hệ thống khỏi những nguy cơ hỏng hóc và sự cố bất ngờ. 3.3.3 Hiển thị Hình 3.4 LCD 2x16
Lựa chọn LCD 2x16 tích hợp I2C cho hệ thống ổn định mức nước được đưa ra
dựa trên các tiêu chí quan trọng sau đây:
Hiển thị giá trị đặt:
LCD 2x16 cho phép hiển thị đồng thời 2 dòng và 16 ký tự trên mỗi dòng, đủ
để hiển thị giá trị đặt cho mức nước trong hệ thống.
Điều này cho phép người dùng cài đặt giá trị mức nước mong muốn và nhìn
thấy giá trị đó trên LCD một cách rõ ràng.
Hiển thị mực nước hiện tại:
LCD 2x16 cũng cho phép hiển thị mực nước hiện tại trong hệ thống.
Bằng cách sử dụng các ký tự và biểu tượng tương ứng, người dùng có thể
theo dõi mức nước hiện tại trong bồn nước một cách dễ dàng. Tích hợp I2C:
LCD 2x16 tích hợp I2C có giao tiếp I2C sẵn có, giúp giảm số lượng chân
kết nối và đơn giản hóa việc tích hợp vào hệ thống.
Giao tiếp I2C cung cấp tốc độ truyền thông nhanh và khả năng kết nối, làm
cho việc giao tiếp với LCD trở nên dễ dàng và tiết kiệm tài nguyên.
LCD 2x16 tích hợp I2C dựa trên tiêu chí hiển thị được giá trị đặt và mực nước
hiện tại là lựa chọn hợp lý cho hệ thống ổn định mức nước. LCD này cung cấp khả
năng hiển thị thông tin một cách rõ ràng và dễ dàng quan sát, đồng thời giúp đơn
giản hóa việc tích hợp và giao tiếp với hệ thống chung.
3.3.4 Lựa chon cơ cấu chấp hành a) Động cơ -
Hình 3.5 bơm nước 365DC 12V
Lựa chọn động cơ bơm nước 365DC 12V cho hệ thống ổn định mức nước được
đưa ra dựa trên các lí do sau đây:
Điện áp làm việc:
Động cơ bơm nước 365DC 12V hoạt động với điện áp 12VDC, phù hợp với
điện áp điều khiển có sẵn trong hệ thống.
Điều này đảm bảo khớp nối tương thích giữa mạch cầu H điều khiển động
cơ bơm nước, giúp đảm bảo hoạt động ổn định và hiệu suất tối ưu.
Lưu lượng tối đa:
Động cơ bơm nước 365DC 12V có khả năng cung cấp lưu lượng tối đa 2-3 lít/phút.
Với yêu cầu của hệ thống là duy trì mức nước ổn định trong dung tích bể
chứa là 5,5 lít, lưu lượng tối đa của động cơ bơm nước này phù hợp với nhu
cầu và đảm bảo khả năng duy trì mức nước mong muốn.
Hiệu suất và độ tin cậy:
Động cơ bơm nước 365DC 12V được đánh giá cao về hiệu suất và độ tin cậy.
Với công suất và thiết kế ổn định, động cơ này có khả năng hoạt động liên
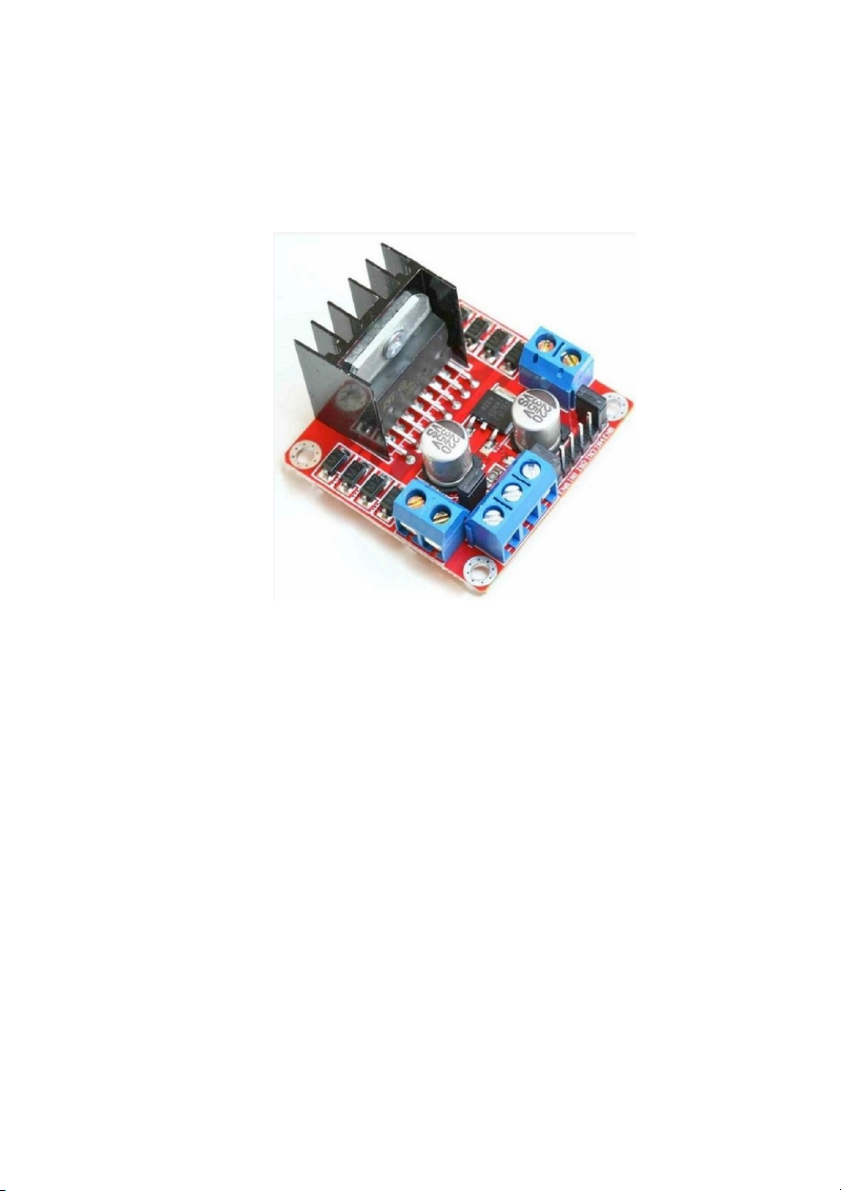
tục tuổi thọ làm việc 2-3 năm b) Mạch cầu H L298N -
Hình 3.6 Mạch cầu H L298
Lựa chọn mạch cầu điều khiển motor cho hệ thống ổn định mức nước được đưa
ra dựa trên tiêu chí quan trọng sau đây:
Điện áp điều khiển:
Mạch cầu điều khiển motor được chọn hỗ trợ điện áp điều khiển từ +5V đến +12V.
Điều này phù hợp với nguồn điện có sẵn trong hệ thống và cho phép linh
hoạt trong việc cung cấp điện cho mạch điều khiển motor.
Phù hợp với động cơ 12V:
Mạch cầu điều khiển motor được lựa chọn phù hợp với động cơ 12V.
Điều này đảm bảo khớp nối tương thích giữa mạch điều khiển và động cơ,
đồng thời giúp đảm bảo hiệu suất và hiệu quả trong việc điều khiển động cơ.
Hiệu suất và khả năng đáp ứng:
Mạch cầu điều khiển motor L298N được biết đến với hiệu suất cao và khả năng đáp ứng tốt.
Mạch này có khả năng cung cấp dòng điện lớn và hỗ trợ điều khiển đa chiều
(forward, reverse), đáp ứng nhu cầu điều khiển chính xác và linh hoạt của hệ thống. 3.3.5 Lựa chon MCU
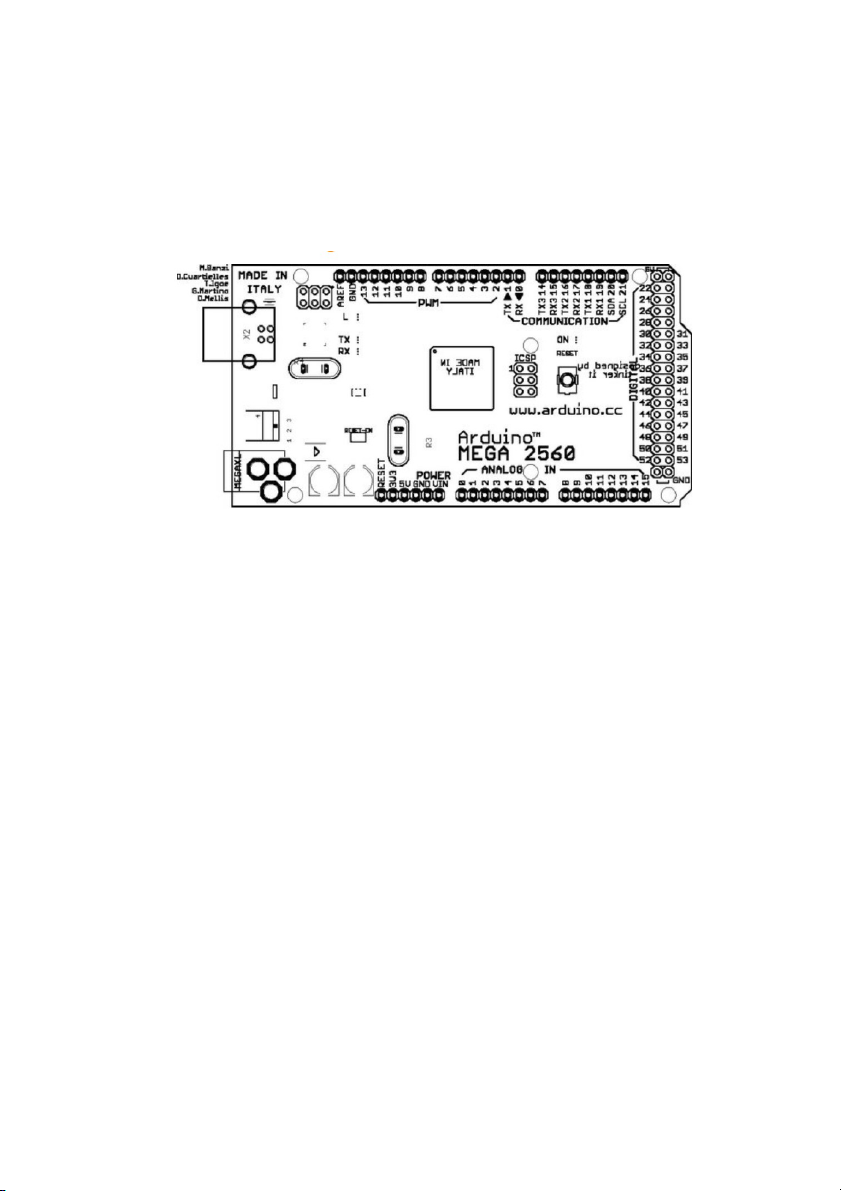
Hình 3.7 Arduino Mega2560
Lựa chọn Arduino Mega2560 cho hệ thống ổn định mức nước được đưa ra dựa trên các lí do sau đây:
Hiệu suất và khả năng xử lý:
Arduino Mega2560 có bộ xử lý mạnh mẽ với vi xử lý ATmega2560, có tốc
độ xử lý nhanh và khả năng xử lý dữ liệu phức tạp.
Điều này cho phép hệ thống xử lý các tác vụ phức tạp như đọc dữ liệu từ
cảm biến, điều khiển động cơ và hiển thị thông tin một cách hiệu quả.
Số lượng chân I/O:
Arduino Mega2560 cung cấp một số lượng lớn chân I/O kết hợp với khả
năng mở rộng thông qua các chân GPIO.
Điều này cho phép kết nối và điều khiển nhiều thiết bị ngoại vi như cảm
biến, mạch điều khiển motor và màn hình hiển thị một cách thuận tiện và linh hoạt. Bộ nhớ lưu trữ:
Arduino Mega2560 có bộ nhớ lưu trữ lớn, bao gồm 256KB bộ nhớ Flash
cho việc lưu trữ chương trình và dữ liệu.
Điều này cho phép lưu trữ và thực thi chương trình phức tạp và lưu trữ các
giá trị dữ liệu quan trọng trong hệ thống.
Tóm tắt thông số chính sơ đồ chân của Arduino Mega2560: 5 Chân GND 3 chân 5V 1 chân 3.3v 1 nút reset 16 chân analog 4 chân UART
54 Chân digital trong đó có 15 chân chúng ta có thể sử dụng như PWM 6 Chân lập trình ISP
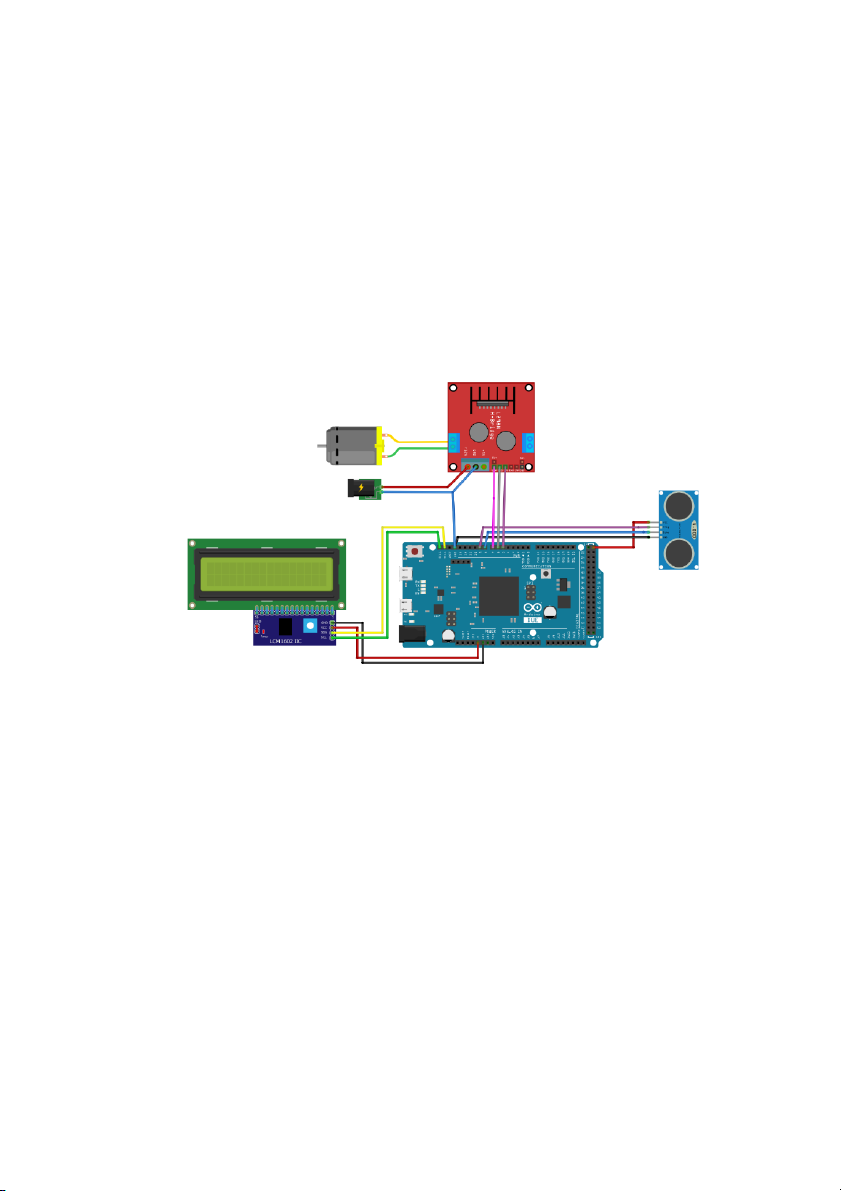
3.4 Sơ đồ nối dây tổng thể
Hình 3.8 Sơ đồ nối dây tổng thể
CHƯƠNG 4 THIẾT KẾ PHẦN MỀM 4.1 Yêu cầu thiết kế
Yêu cầu chức năng:
Đo mức nước: Hệ thống cần có khả năng đo chính xác mức nước trong bồn chứa
sử dụng các cảm biến đo mức nước phù hợp với Arduino.
Giám sát mức nước: Phần mềm cần hiển thị thông tin về mức nước hiện tại trên
giao diện người dùng, bao gồm cả số liệu và đồ thị biểu diễn.
Điều khiển mức nước: Phần mềm cần cho phép người dùng điều khiển mức
nước trong bồn, bao gồm cả việc bật/tắt bơm nước hoặc thực hiện các hành động điều khiển khác.
Yêu cầu hiệu năng:
Phần mềm cần có hiệu năng tốt, đảm bảo thời gian phản hồi nhanh chóng khi
đo, giám sát và điều khiển mức nước.
Cần tối ưu hóa tài nguyên và bộ nhớ để đảm bảo hoạt động ổn định trên nền tảng Arduino.
Yêu cầu về tương thích:
Phần mềm cần tương thích với các phiên bản phần cứng và phần mềm Arduino
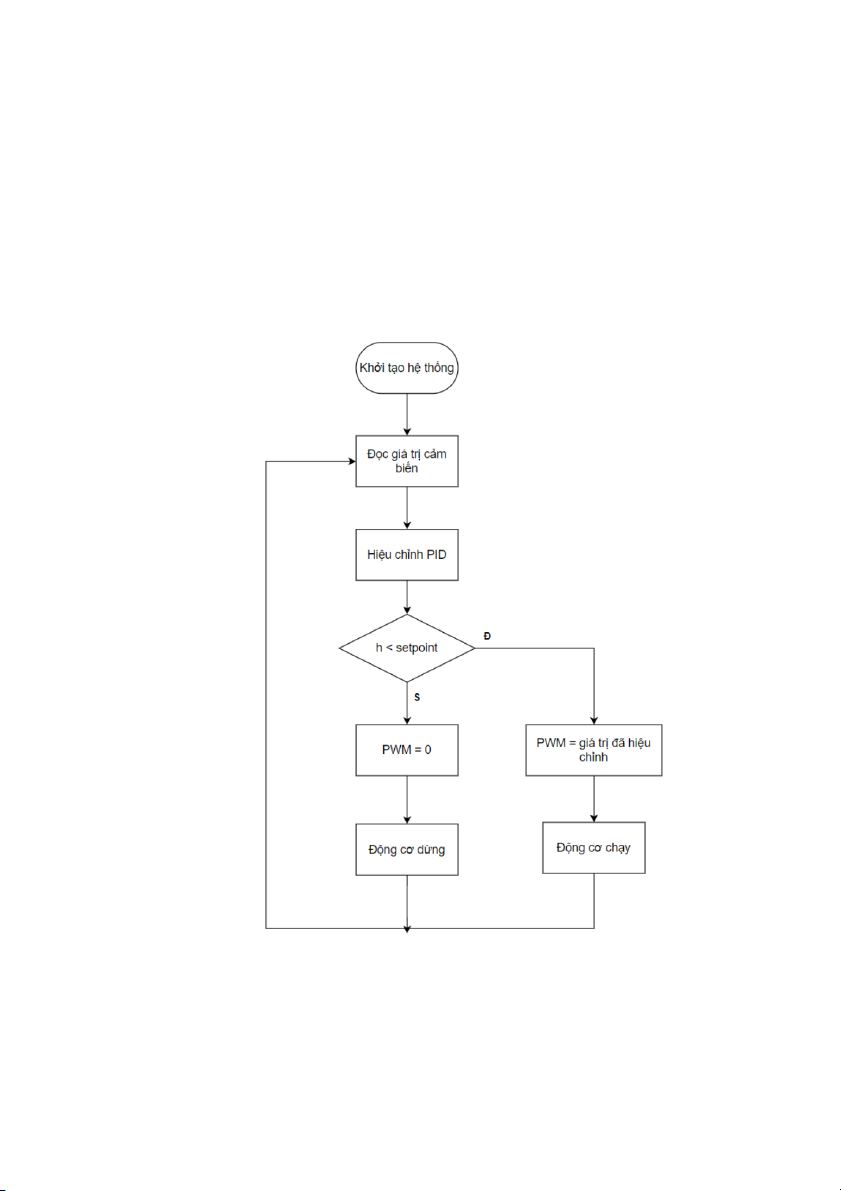
hiện có để đảm bảo tính tương thích và dễ dàng điều khiển. 4.2 Giải thuật
Hình 4.1 Chương trình giải thuật
Bước 1. Khởi tạo hệ thống: Bước này đảm bảo rằng tất cả các thành phần của hệ
thống, bao gồm cả cảm biến, bộ điều khiển PID và động cơ, được khởi động và sẵn sàng hoạt động.
Bước 2. Đọc giá trị cảm biến: Trong bước này, hệ thống đọc giá trị từ cảm biến
mức nước. Cảm biến siêu âm được sử dụng để đo khoảng cách từ mặt nước đến
cảm biến và chuyển đổi thành giá trị số.
Bước 3. Hiệu chỉnh PID: Bước này liên quan đến việc điều chỉnh bộ điều khiển
PID. PID là một thuật toán điều khiển phản hồi tự động, được sử dụng để điều
chỉnh tín hiệu điều khiển đến động cơ để duy trì mức nước ở mức mong muốn
(setpoint). Trong bước này, các thông số PID như hệ số tỷ lệ, hệ số tích phân và hệ
số đạo hàm được hiệu chỉnh để đạt được phản hồi tốt và ổn định trong việc duy trì mức nước.
Bước 4. hhơn mức đặt (setpoint) hay không. Nếu điều kiện này đúng, tức là mức nước thấp
hơn mức đặt, tiếp tục bước 5. Nếu điều kiện này sai, tức là mức nước đạt hoặc vượt
quá mức đặt, hệ thống chuyển sang bước 6.
Bước 5. Động cơ chạy và PWM = giá trị đã hiệu chỉnh: Trong bước này, động
cơ được kích hoạt và bắt đầu hoạt động để bơm nước vào bồn. Tín hiệu điều khiển
(PWM) được thiết lập thành giá trị đã được hiệu chỉnh từ bước 3. PWM được sử
dụng để điều chỉnh tốc độ và công suất của động cơ, từ đó điều chỉnh lượng nước được bơm vào bồn.
Bước 6. Động cơ dừng và PWM = 0: Trong bước này, động cơ được tắt và
ngừng hoạt động. Giá trị PWM được thiết lập thành 0, đảm bảo rằng không có tín
hiệu điều khiển nào được gửi đến động cơ. Điều này đảm bảo rằng không có nước
được bơm vào bồn nước vì mức nước đã đạt mức đặt hoặc vượt quá mức đặt. 4.3 Chương trình
Chương trình hàm đọc cảm biến //hàm đọc cảm biến float GetDistance() { double duration, distance;
//Phát xung từ chân trig, có độ rộng là 10ms
digitalWrite(TRIG_PIN,LOW); //Tắt chân trig delayMicroseconds(2);
digitalWrite(TRIG_PIN,HIGH); //bật chân trig để phát xung
delayMicroseconds(10); //Xung có độ rộng là 10 microsecond digitalWrite(TRIG_PIN,LOW);
//Chân echo sẽ nhận xung phản xạ lại
Tài liệu liên quan:
-

BÁO CÁO THỰC HÀNH MÔN CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
62 31 -

Trắc nghiệm 1, 2, 4, 5 - Điều khiển tự động và Hàm truyền | Môn Tự động điều khiển - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
156 78 -

Báo cáo thực tập hệ thống điều khiển tự động Bài số 1. Ứng dụng Matlab trong mô tả toán học hệ thống | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
633 317 -

Báo cáo 5 bài thí nghiệm thực tập môn tự động điều khiển | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
351 176