Báo cáo thực tập hệ thống điều khiển tự động Bài số 1. Ứng dụng Matlab trong mô tả toán học hệ thống | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1. Tại sao phải đơn giản hàm truyền của hệ thống? Vì đối tượng điều khiển rất đa dạng và phong phú, có những bản chất vật lí khác nhau như nhiệt độ, tốc độ, lực…. để có cơ sở của toán học để phân tích , thiết kế được các hệ thống điều khiển có bản chất vật lí khác nhau. Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống tuyến tính có thể điều khiển bằng phương trình vi phân bậc cao, việc khảo sát bằng phương trình đó sẽ gây khó khăn. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Tự động điều khiển (Automotive Engineerings) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ BỘ MÔN TỰ ĐỘNG ĐIỀU KHIỂN
-----------------⸙∆⸙-----------------
Báo cáo thực tập hệ thống
điều khiển tự động
Bài số 1. Ứng dụng Matlab trong mô tả toán học hệ thống.
Biên soạn: Nguyễn Huỳnh Thanh Minh
Tp. Hồ Chí Minh, 2023 Mục lục
1. Báo cáo tìm hàm truyền thông qua hệ thống có sơ đồ hình 1.1 và hình 1.2.....2
1.1. Báo cáo tính toán lí thuyết...............................................................................2
1.2. Báo cáo sử dụng matlab...................................................................................5
2. Báo cáo về biễu diễn các hàm truyền bằng hệ phương trình biến trạng thái.11
2.1. Báo cáo kết quả viết phương trình trạng thái theo lí thuyết............................11
2.2. Báo cáo kết quả sử dụng matlab....................................................................13
3. Khi hàm truyền hệ thống hình 1.3 được tính toán theo các hàm matlab.......16
3.1. Giải thích qua các hàm matlab trong quá trình tính toán trên........................16
3.2. Sử dụng matlab cho hàm trên để tính toán kết quả ở hình 1.1 và hình 1.2.....18
4. Câu hỏi mở:.........................................................................................................24 1
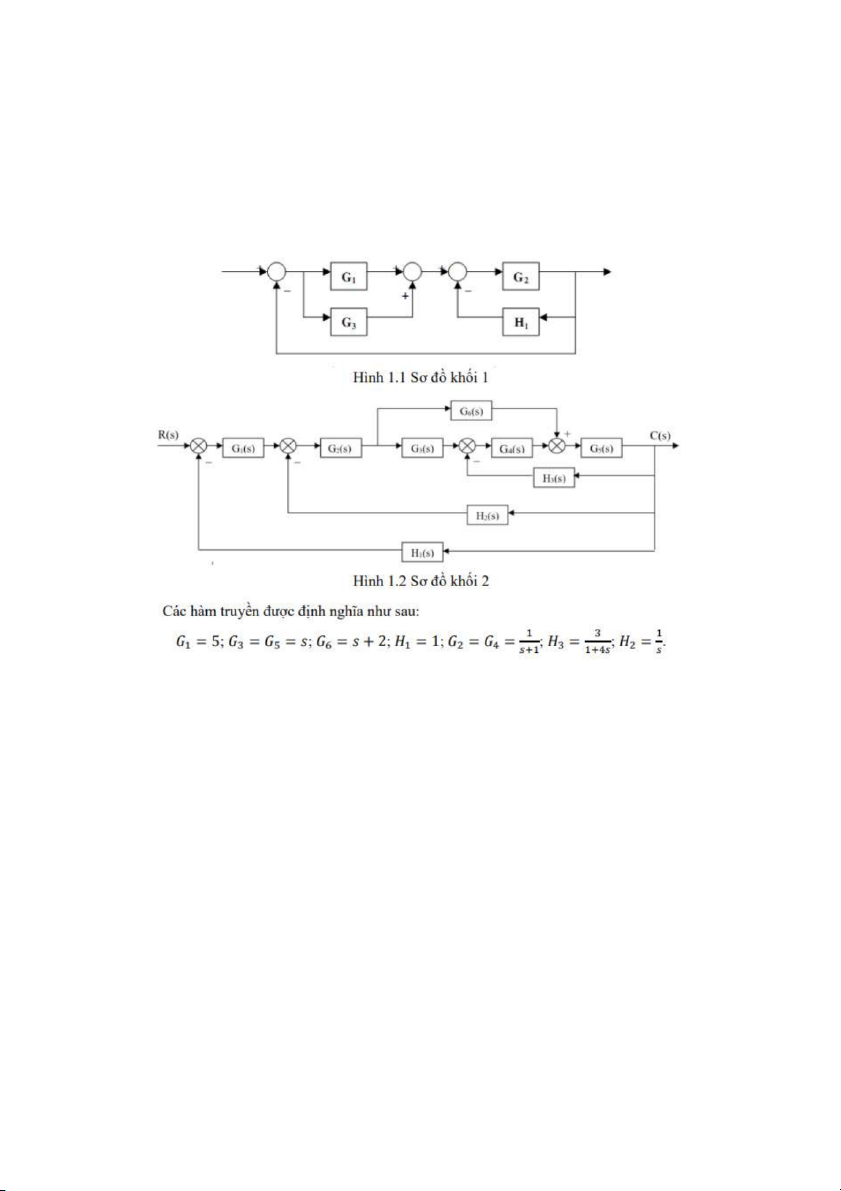
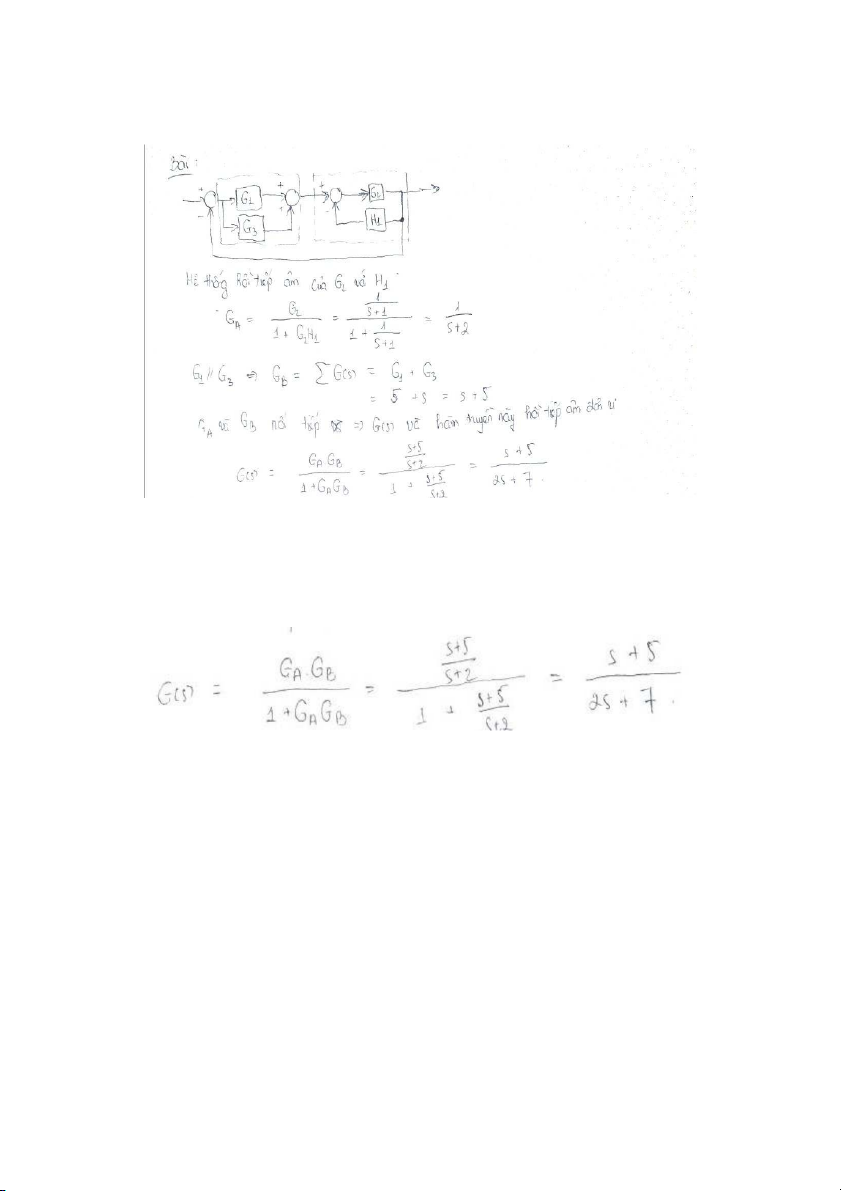
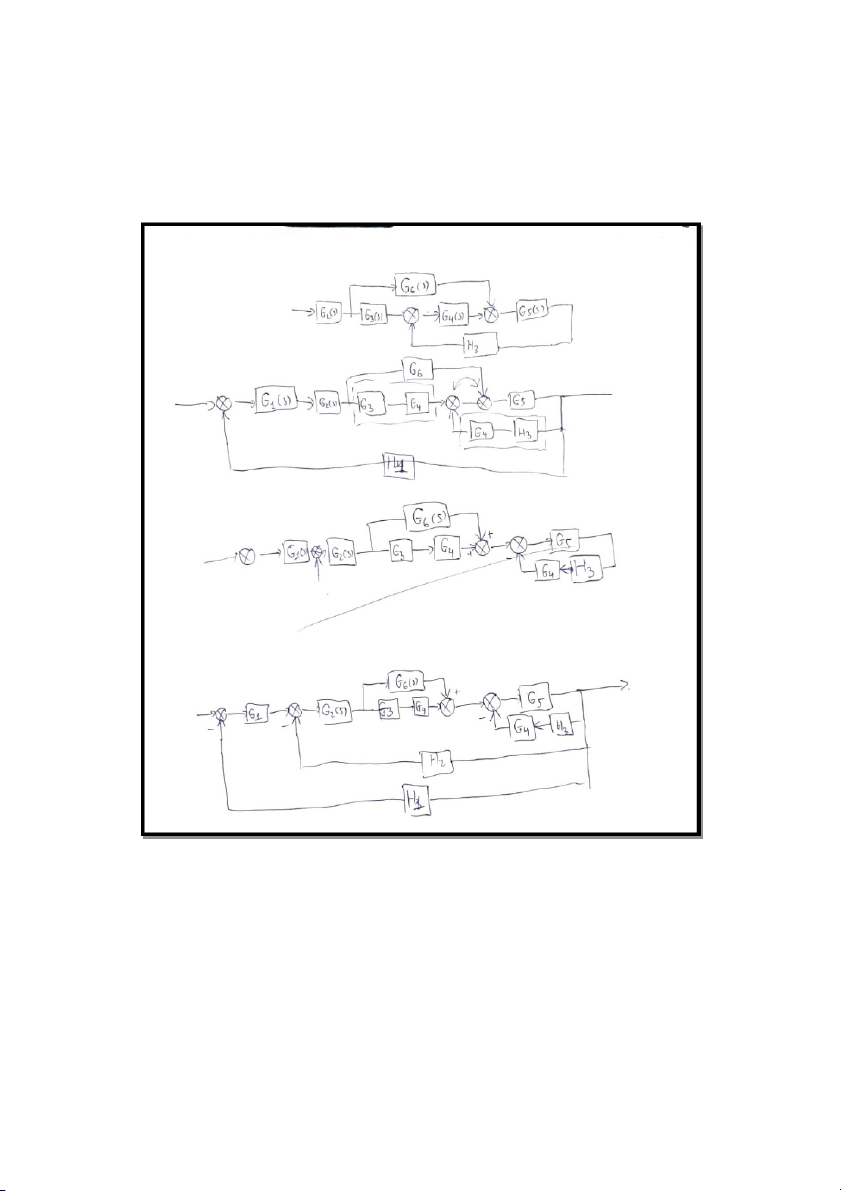
1. Báo cáo tìm hàm truyền thông qua hệ thống có sơ đồ hình 1.1 và hình 1.2. 1.1.
Báo cáo tính toán lí thuyết. Theo sơ đồ khối 1: 2
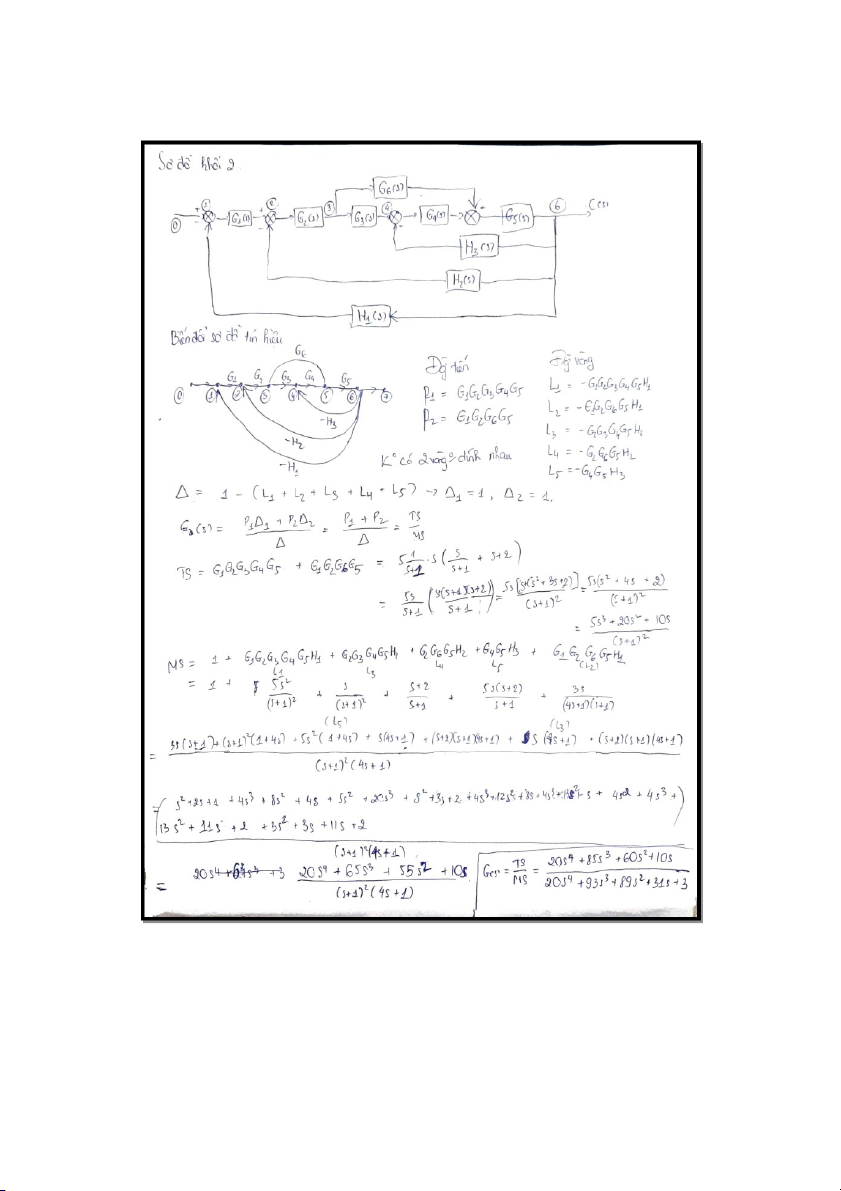
Kết quả theo lí thuyết: Theo sơ đồ khối 2: 3 4
Kết quả hàm truyền sơ đồ khối 2:
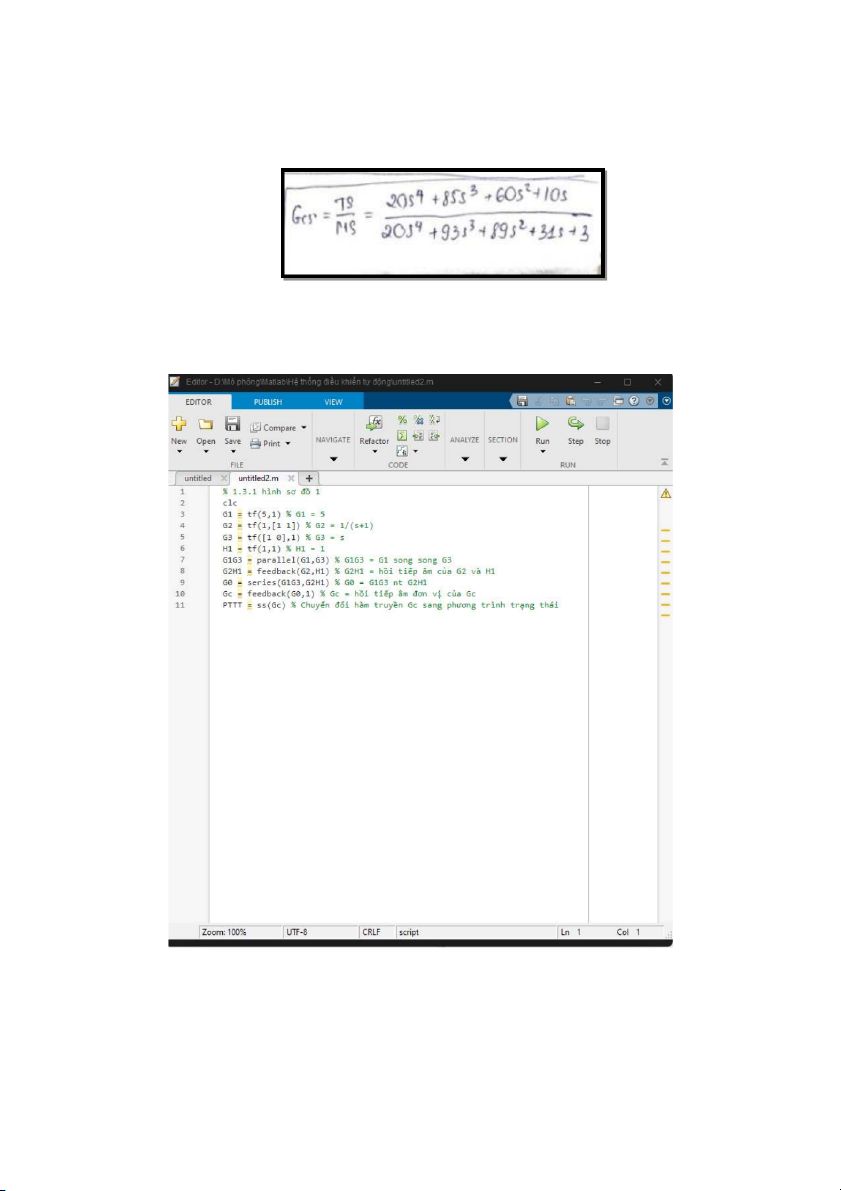
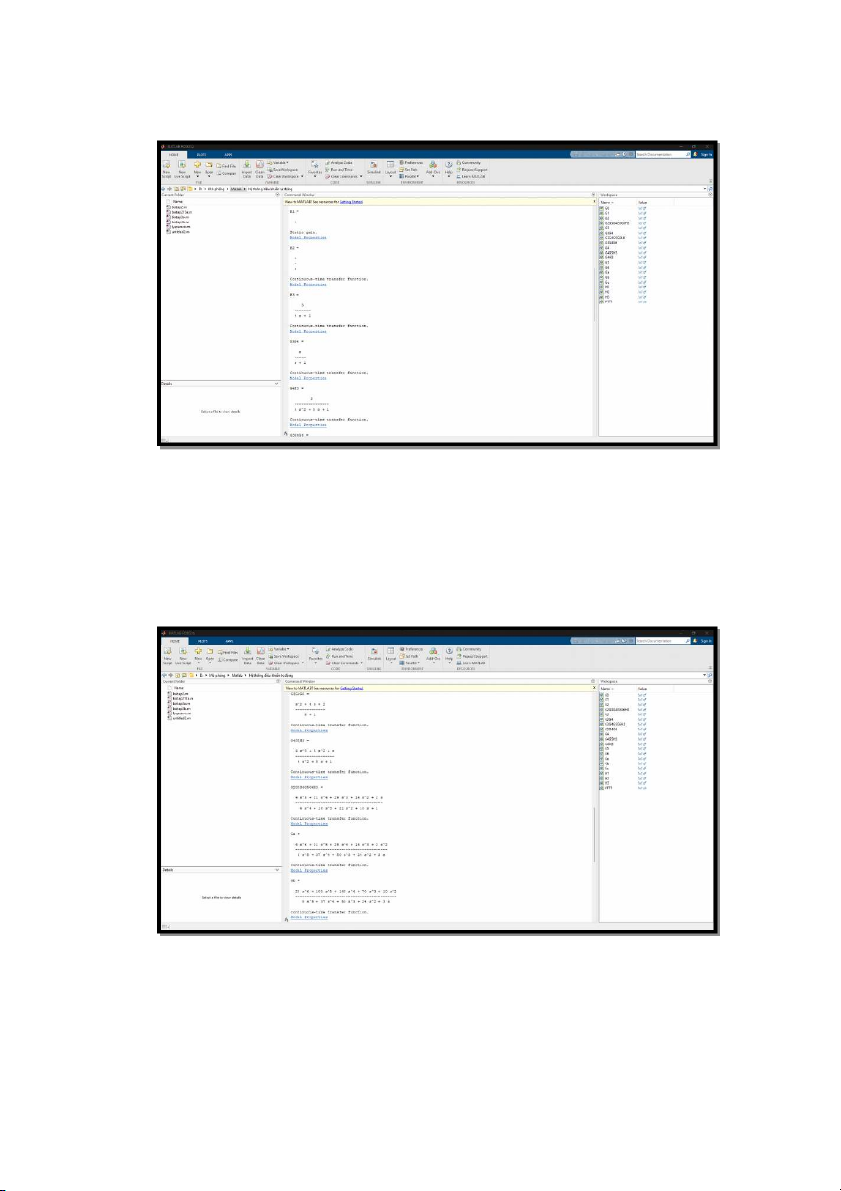
1.2. Báo cáo sử dụng matlab. Theo sơ đồ khối 1:
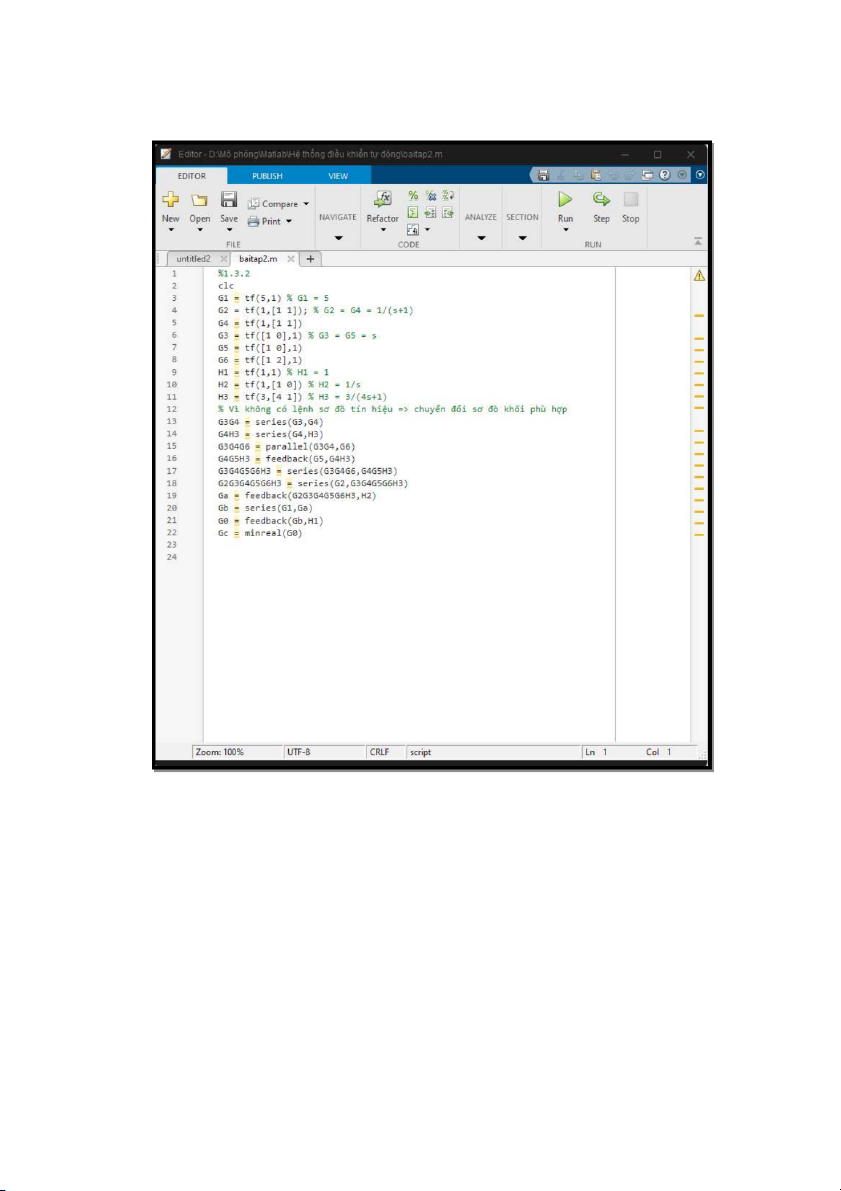
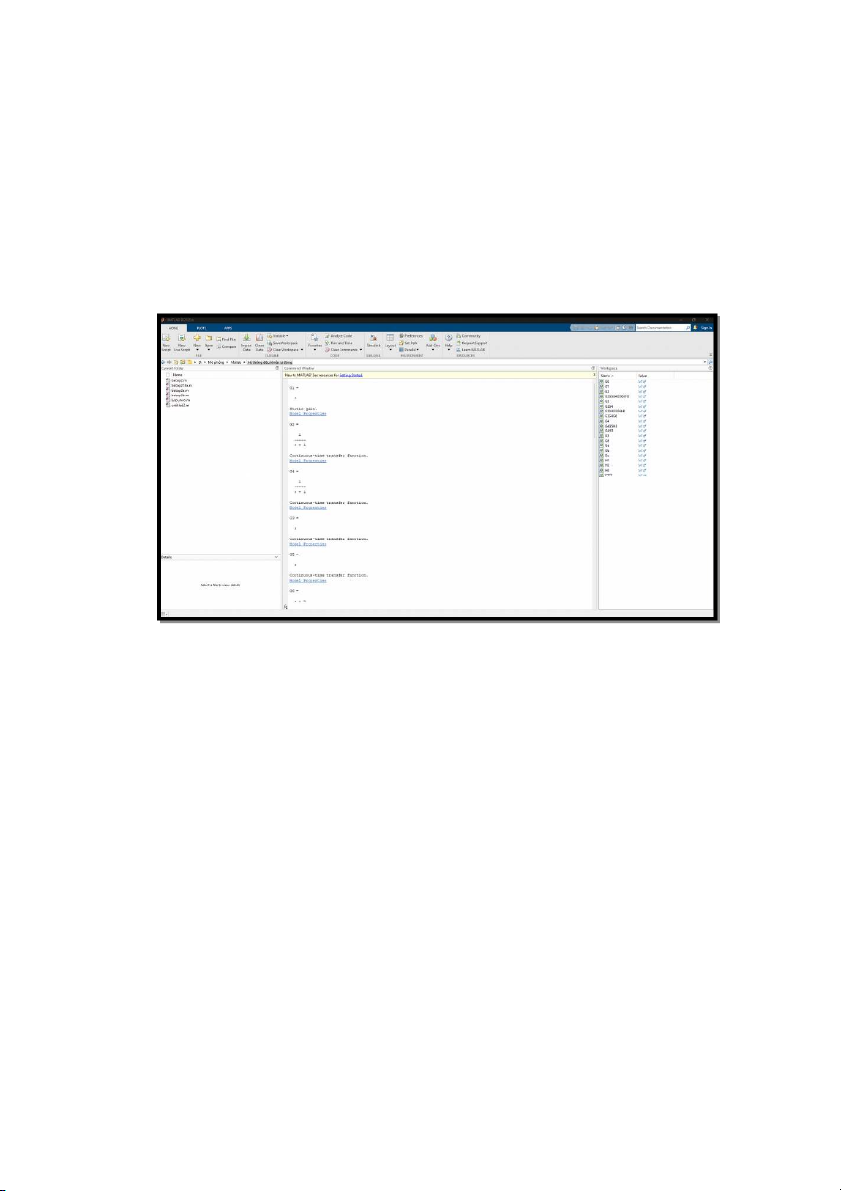
- Nhập lệnh theo sơ đồ khối 1:
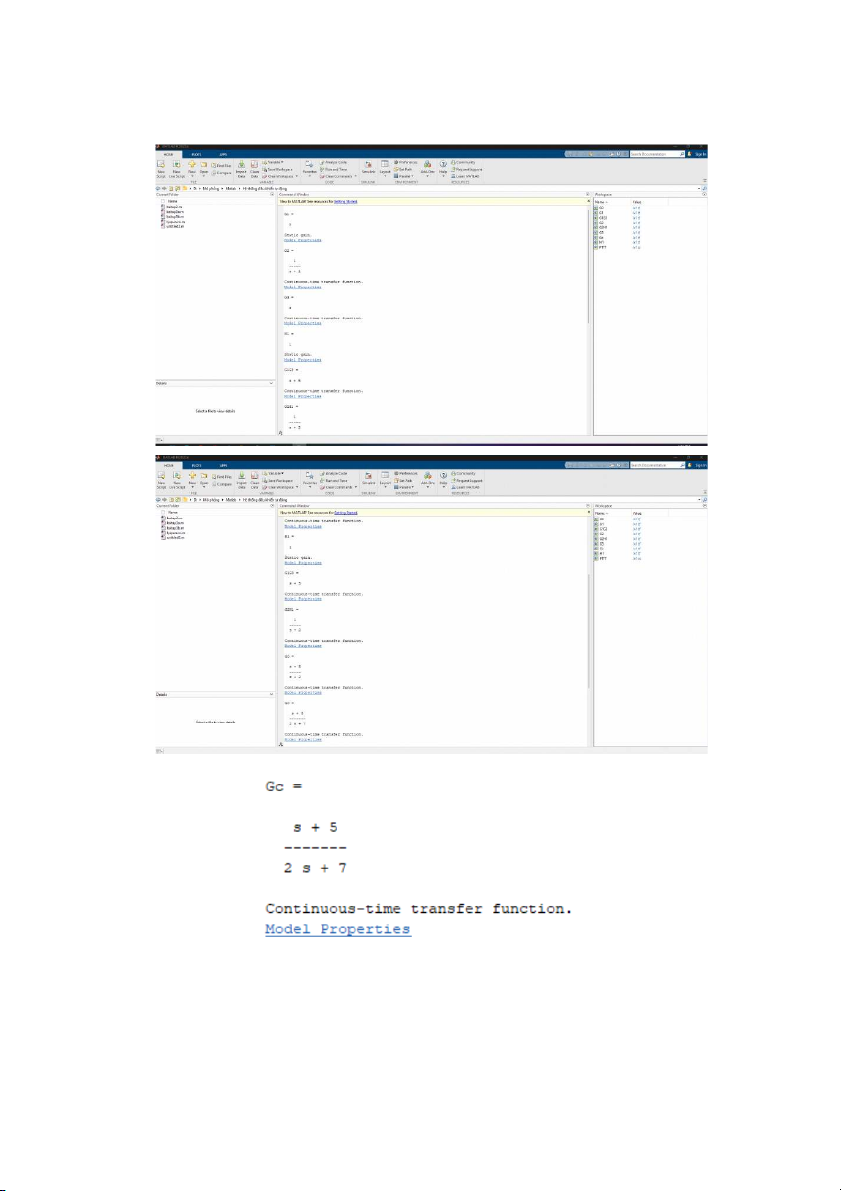
- Và kết quả hiển thị : 5 Theo sơ đồ khối 2: 6
- Trước khi nhập lệnh, chuyển đổi giữa các khối và cục bộ tổng:
+ Chuyển bộ tổng âm ra sau khối G4 khi đó nhánh H3.
+ Chuyển vị trí 2 bộ tổng dương ra trước bộ âm G5.
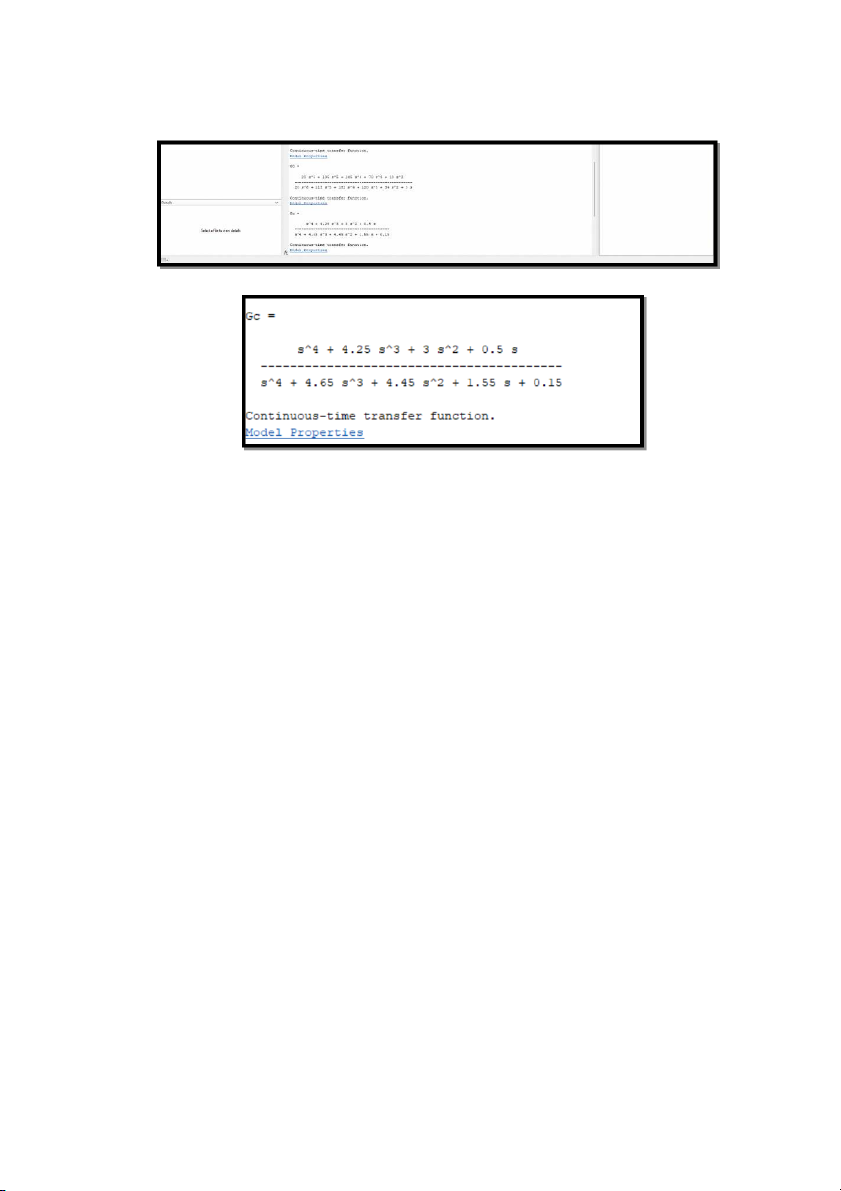
- Nhập lệnh theo sơ đồ khối: 7 Kết quả hiện thị: 8 9 10 Kết quả cuối cùng:
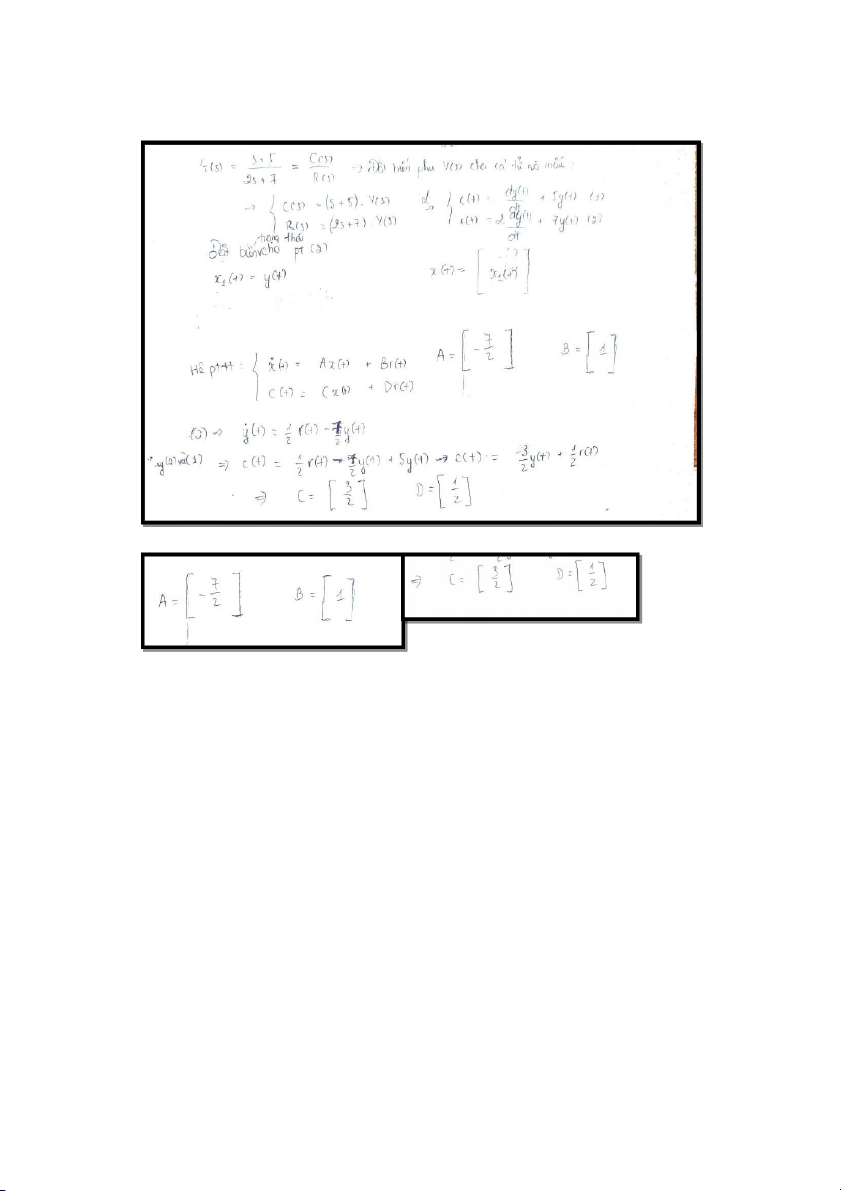
2. Báo cáo về biễu diễn các hàm truyền bằng hệ phương trình biến trạng thái. 2.1.
Báo cáo kết quả viết phương trình trạng thái theo lí thuyết. Theo sơ đồ khối 1: 11
Kết quả của sơ đồ khối 1: Theo sơ đồ khối 2: 12
Kết quả của sơ đồ khối 2:
2.2. Báo cáo kết quả sử dụng matlab Theo sơ đồ khối 1: 13
- Nhập lệnh theo sơ đồ khối 1:
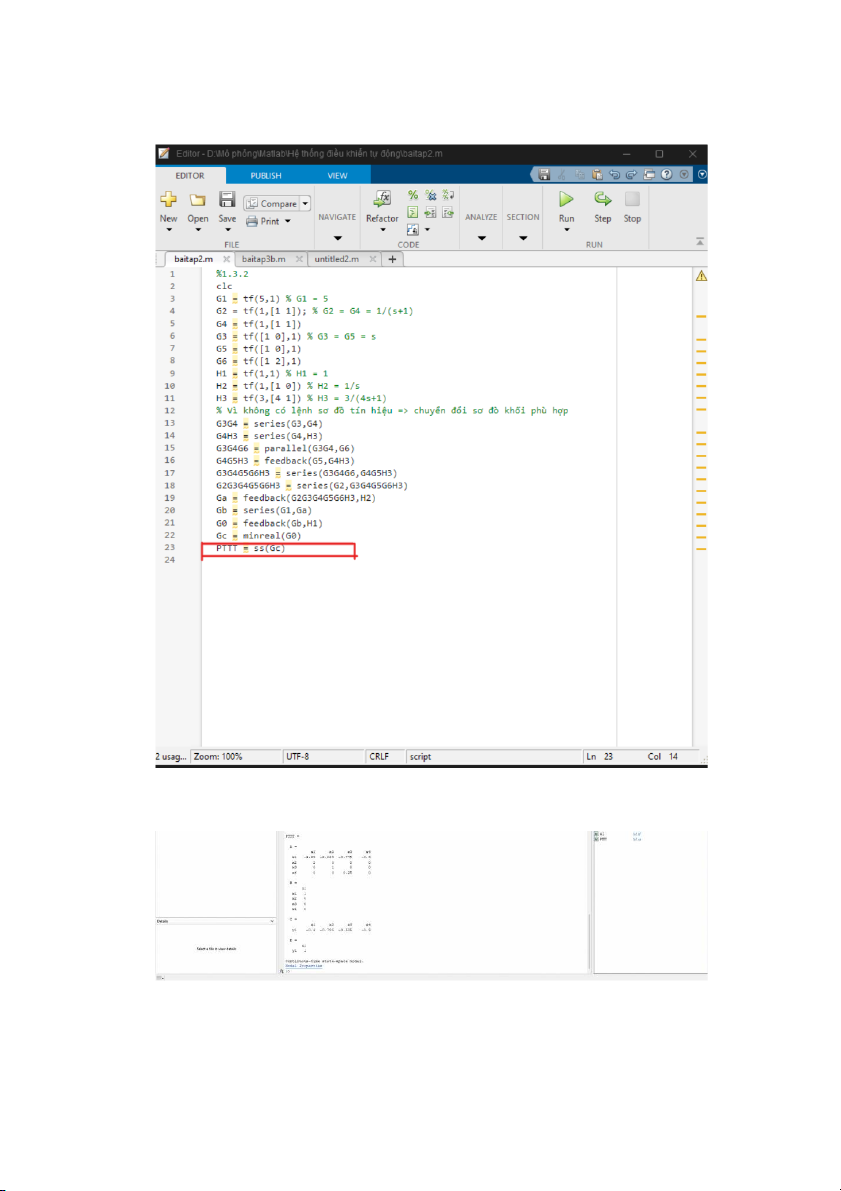
- Và kết quả hiện thị: 14 Theo sơ đồ khối 2:
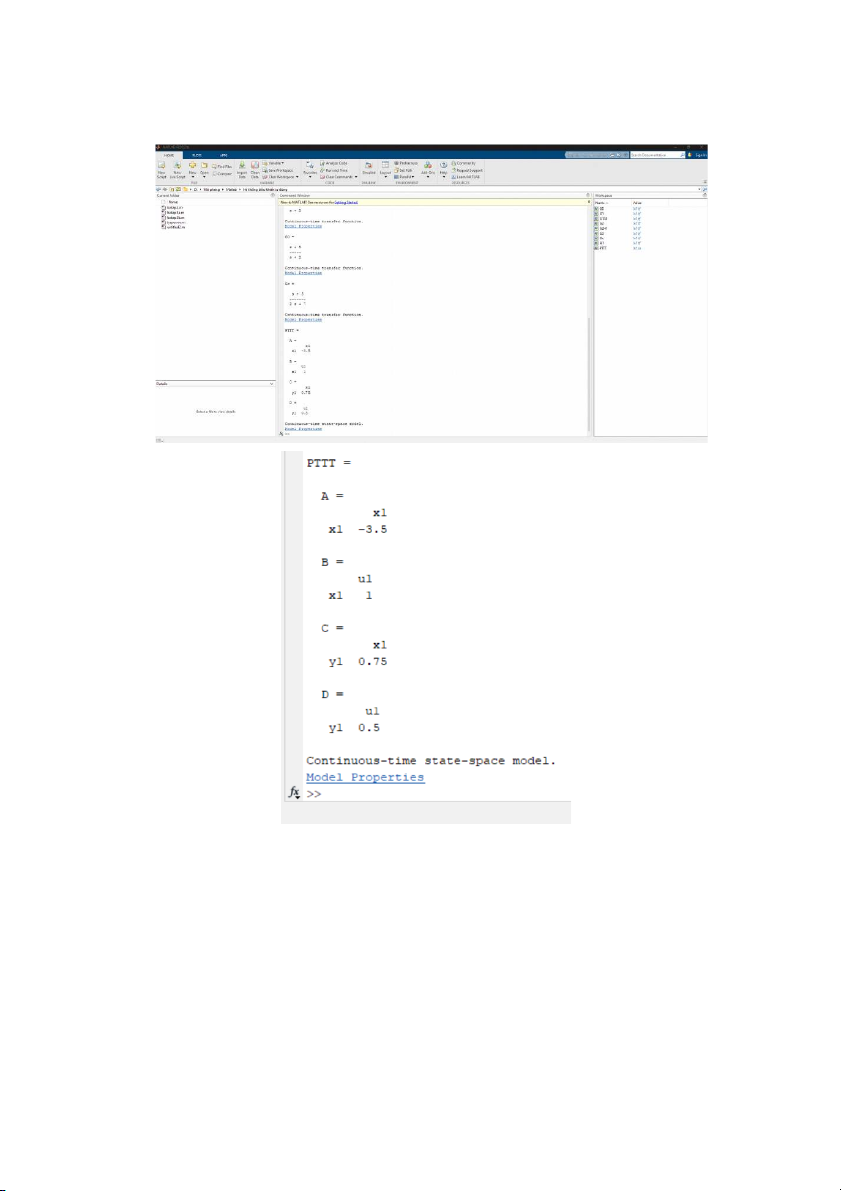
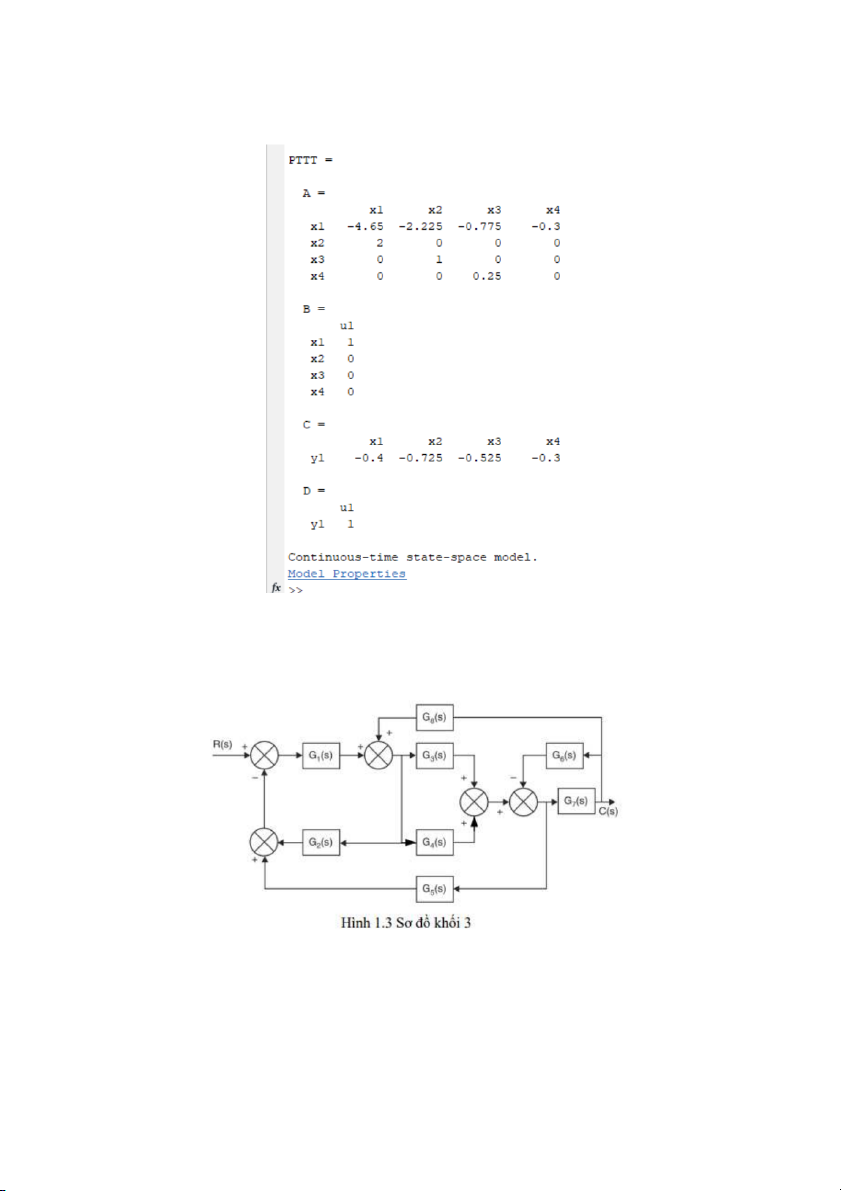
- Nhập lệnh ss để biến đổi trạng thái: 15
Và kết quả hiển thị: 16
3. Khi hàm truyền hệ thống hình 1.3 được tính toán theo các hàm matlab.
3.1. Giải thích qua các hàm matlab trong quá trình tính toán trên. 17
Nhập đúng các chức năng truyền lệnh từ 1 đến 8. Vì sơ đồ khối phức tạp nên ta
sử dụng lệnh connect để tìm chức năng truyền tải trên sơ đồ như hình vẽ đặt thêm Q9 = 1 tại ngõ vào R(s).
Sử dụng ma trận Q để chỉ ra sơ đồ khối 3 trên hình 1.3:
• G1 có đầu vào các khối là -G2, -G5, G9 thì hàng 1 sẽ là 1 -2 -5 -9.
• G2 có đầu vào các khối là G1, G8 thì hàng 2 sẽ là 2 1 8 0.
• G3 có đầu vào các khối là G1, G8 thì hàng 3 sẽ là 3 1 8 0.
• G4 có đầu vào các khối là G1, G8 thì hàng 4 sẽ là 4 1 8 0.
• G5 có đầu vào các khối là G3, G4, -G6 thì hàng 5 sẽ là 5 3 4 -6.
• G6 có đầu vào khối là G7 thì hàng 6 sẽ là 6 7 0 0.
• G7 có đầu vào các khối là G3, G4, -G6 thì hàng 7 sẽ là 7 3 4 -6.
• G8 có đầu vào khối là G7 thì nên treo 8 sẽ là 8 7 0 0.
Ngõ ra là 7 vì sau G7 là 1 điểm chiến đấu ra cũng là C(s) => đầu ra lệnh = 7. Và
ngõ vào là 9 vì từ R(s) vào tổng cộng nên có thể đặt G9(s) = 1 center local with the
path to R(s) => đầu ra lệnh = 9.
Lệnh kết nối sẽ lấy thông tin từ ma trận Q được tiến hành kết nối chéo với hệ
thống tạo khối thành 1 với các ngõ vào (G9) và ngõ ra (G7) được chọn bởi các đầu
vào và đầu ra biến thể.
Cuối cùng, sử dụng lệnh tf để tạo chức năng truyền thông từ hệ thống được
thiết lập bởi lệnh connect. 18
3.2. Sử dụng matlab cho hàm trên để tính toán kết quả ở hình 1.1 và hình 1.2 Theo sơ đồ 1: = 19
Tài liệu liên quan:
-

BÁO CÁO THỰC HÀNH MÔN CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
62 31 -

Trắc nghiệm 1, 2, 4, 5 - Điều khiển tự động và Hàm truyền | Môn Tự động điều khiển - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
156 78 -

Báo cáo 5 bài thí nghiệm thực tập môn tự động điều khiển | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
351 176 -

Báo cáo đồ án môn học hệ thống điều khiển tự động - Đề tài: Điều khiển PID số cho hệ bồn nước đơn | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.5 K 743