Báo Cáo Emerging Technologies nhóm 8 - Công nghệ thông tin | Đại học Hoa Sen
Báo Cáo Emerging Technologies nhóm 8 - Công nghệ thông tin | Đại học Hoa Sen được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem
Môn: Công nghệ thông tin (asf-1243) 109 tài liệu
Trường: Trường Đại học Hoa Sen 5.3 K tài liệu
Tác giả:






Preview text:
Nhóm 8
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC HOA SEN
KHOA CÔNG NGHỆ THÔNG TIN Emerging Technologies TÊN ĐỀ TÀI:
NHẬN DIỆN CÂY XƯƠNG RỒNG TỪ TRÊN CAO Giảng viên : Lê Thanh Tùng Lớp : TIN321DE01
Nhóm sinh viên thực hiện :
Trần Thị Xuân Mai - 2196991
Trần Quốc Bảo - 2190954
Trịnh Xuân An Bình - 2180760 Số nhóm : 8 THÁNG 05 / NĂM 2022 1. Nhóm 8 LỜI CQM ƠN
Chúng em xin chân thnh gư뀉i lơꄀi cm ơn đ Ān thầy Lê Thanh Tùng – ging viên d愃⌀y
môn Emerging Technologies. Thầy đ* luôn nhiê ,t t-nh ging d愃⌀y c.ng như l h0 trơꄣ
chúng em trong su Āt qu愃Ā tr-nh h漃⌀c lm đề ti. Đ* có lúc chúng em đ* mu Ān bỏ cuộc
nhưng thầy đ* hướng dẫn cho chúng em tận t-nh, giúp chúng em trong từng buổi h漃⌀c
v đ* gii đ愃Āp rất nhiều những thDc mDc trong qu愃Ā tr-nh ging d愃⌀y. Chính v- th Ā chúng
em đ* quy Āt tâm hon thnh đề ti một c愃Āch t Āt nhất để không phụ ơn thầy. Em nhóm
trưởng xin thay mặt c nhóm chúc thầy luôn dKi do sư뀁c khỏe v luôn trn đầy tâm
huy Āt để có thể gi愃Āo dục cho những th Ā hệ sau may mDn đươꄣc thầy ging d愃⌀y.
Chúng em xin chân thnh cm ơn. P a g e | 1 Nhóm 8 MỤC LỤC:
1. GIỚI THIỆU.........................................................................................................3
2. CÁC LOẠI CÔNG NGHỆ...................................................................................4 2.1 Công ngh cệ a FL
ủ YCAM ..........................................................................................................4 2.1.1
Khái niệm.......................................................................................................................4 2.1.2
Cấấu tạo...........................................................................................................................4 2.1.3 Phấn lo i
ạ ........................................................................................................................4 2.1.4 M t sôấ công d ộ ng c ụ a Flycam ủ
........................................................................................4 2.1.5 M t sôấ h ộ ng dấẫn qua ướ y Flycam đ có ể nh ch ả p và video chấất l ụ
ượ ng... .......................5 2.2 Công ngh DEEP ệ
LEARNING...................................................................................................5 2.2.1
Khái niệm.......................................................................................................................5 2.2.2
Deep Learning hay gi i quyếất nh ả ng vấấn đ ữ ếề nh thếấ nào? ư
............................................6 2.2.3 Có nh ng kyẫ thu ữ t Deep Learning nào? ậ
.........................................................................6 2.3
Convolu琀椀onal Neural Network...............................................................................................6 2.3.1
Khái niệm.......................................................................................................................6 2.3.2 Cấấu trúc c a m ủ ng CNN ạ
.................................................................................................7 2.4 Công ngh OpenCV ệ
................................................................................................................8 2.4.1
Khái niệm.......................................................................................................................8 2.4.2 OpenCV ra đ i khi nào? ờ
.................................................................................................8 2.4.3 OpenCV mang l i nh ạ ng l ữ i ích gì? ợ
................................................................................9 2.4.4 OpenCV đ c s ượ ử d n ụ g đ làm gì? ể
..................................................................................9 -
C愃Āc ho愃⌀t động xư뀉 lý h-nh nh................................................................................................9 - Xấy d ng GUI ự
.........................................................................................................................9
3. KẾT LUẬN.........................................................................................................10
TÀI LIÊUU THAM KHQO.........................................................................................11 P a g e | 2 Nhóm 8 2. GIỚI THIỆU
Công nghệ l sự ph愃Āt minh, sự thay đổi, việc sư뀉 dụng, v ki Ān thư뀁 về c c 愃Āc công
cụ, m愃Āy móc, kỹ thuật, kỹ năng nghề nghiệp, hệ th Āng, v phương ph愃Āp tổ chư뀁c, nhằm
gii quy Āt một vấn đề, ci ti Ān một gii ph愃Āp đ* tKn t愃⌀i, đ愃⌀t một mục đích, hay thực
hiện một chư뀁c năng cụ thể đòi hỏi hm lươꄣng chất x愃Ām cao. Công nghệ nh hưởng
đ愃Āng kể lên kh năng kiểm so愃Āt v thích nghi của con ngươꄀi c.ng như của những động
vật kh愃Āc vo môi trươꄀng tự nhiên của m-nh. Nói một c愃Āch đơn gin, công nghệ l sự
ư뀁ng dụng những ph愃Āt minh khoa h漃⌀c vo những mục tiêu hoặc sn phẩm thực tiễn v
cụ thể phục vụ đơꄀi s Āng con ngươꄀi, đặc biệt trong lĩnh vực công nghiệp hoặc thương
m愃⌀i. Thuật ngữ công nghệ có thể đươꄣc dùng theo nghĩa chung hay cho những lĩnh vực
cụ thể, ví dụ như "công nghệ xây dựng", "công nghệ thông tin". P a g e | 3 Nhóm 8
3. CÁC LOẠI CÔNG NGHỆ
3.1 Công nghệ của FLYCAM 3.1.1 Khái niệm
Flycam l vi Āt tDt của camera, Flycam l một thi Āt bị bay có gDn camera v đươꄣc
điều khiển từ xa để chụp nh, quay video. Như vậy Flycam hiểu đơn gin l một chi Āc
camera bay, chúng ta sư뀉 dụng để chụp nh v quay video từ trên cao, giúp chúng ta
lấy đươꄣc những h-nh nh rộng, bao qu愃Āt, ấn tươꄣng.
Flycam hiện nay l thi Āt bị phổ bi Ān trên th Ā giới, đươꄣc ư뀁ng dụng rất nhiều vo cuộc
s Āng. Ngươꄀi ta thươꄀng sư뀉 dụng, chụp nh, ghi l愃⌀i kỉ niệm v có ngươꄀi dùng vo công
việc quay phim, sn xuất phim nh, kh愃Ām ph愃Ā vị trí con ngươꄀi khó ti Āp cận để quay rõ
đươꄣc những cnh đẹp từ phía trên xu Āng. 3.1.2 Cấu tạo
Flycam có cấu t愃⌀o gKm 4 bộ phận chính: M愃Āy bay điều khiển, camera, gimbal (đây l
bộ phận khung giữ camera c Ā định), bộ điều khiển v nhận tín hiệu. Ngoi ra, vẫn còn
một s Ā bộ phận kh愃Āc để bộ trơꄣ cho sự ho愃⌀t động của m愃Āy.
Flycam thươꄀng đươꄣc lDp đặt bởi một camera chuyên dụng thay v- c愃Āc lo愃⌀i camera
thông thươꄀng. Do m愃Āy cần ho愃⌀t động dựa trên y Āu t Ā ch Āng rung khi bay trên không
v truyền tín hiệu xu Āng mặt đất. Việc truyền tín hiệu, đươꄣc thông qua bộ ph愃Āt sóng
5.8g hoặc 2.4g v chíp Iosd. Lo愃⌀i chíp ny, giúp ngươꄀi chụp lựa đươꄣc góc quay đẹp
nhất, thông qua thông s Ā h-nh nh v mn h-nh điều khiển dưới mặt đất. 3.1.3 Phân loại
Thi Āt bị Flycam gKm có 2 lo愃⌀i:1. Dòng Flying platform. - Flying platform
Dòng ny đươꄣc lDp đặt theo công thư뀁c chuẩn v quay phim chụp h-nh theo từng mục
đích chuyên dụng. Ưu điểm của lo愃⌀i ny l có thể bay rất xa v ho愃⌀t động trong điều
kiện thơꄀi ti Āt khDc nghiệt nhất. Do Flying platform có chất lươꄣng t Āt, nên nó đươꄣc ư뀁ng
rộng r*i trong c愃Āc ngnh như khoa h漃⌀c, quân sự, kinh t Ā, đặc biệt đươꄣc dùng quay
kh愃Ām ph愃Ā ở những địa điểm khó khăn như rừng rậm hay sa m愃⌀c. - Ready to fly:
Dòng ny đ* đươꄣc c愃Āc sư뀉 dụng rộng r*i trong hiện nay. thươꄀng đươꄣc ư뀁ng dụng trong
quay phim chụp h-nh teambuilding, sự kiện, công tr-nh, sn xuất v có thể sư뀉 dụng trong c nông nghiệp.
3.1.4 Một số công dụng của Flycam
- Quay, chụp từ góc nh-n trên cao
Đây l công dụng phổ bi Ān nhất của Flycam m ai c.ng bi Āt. Những m愃Āy nh truyền
th Āng bị h愃⌀n ch Ā bởi góc chụp nhưng Flycam th- kh愃Āc. Nó cho những h-nh nh, thước
phim với góc chụp từ trên cao vô cùng độc đ愃Āo. Giơꄀ đây, những ngươꄀi yêu công nghệ
sẽ đươꄣc thỏa sư뀁c s愃Āng t愃⌀o ở m漃⌀i độ cao, m漃⌀i góc chụp nhơꄀ Flycam.
- Gi愃Ām s愃Āt động vật hoang d* P a g e | 4 Nhóm 8
Sư뀉 dụng flycam bay từ trên cao có thể gi愃Ām s愃Āt, quan s愃Āt đươꄣc động vật hoang d* m
không lm chúng kinh sơꄣ. Đây vừa l gii ph愃Āp ti Āt kiệm chi phí vừa tr愃Ānh nguy hiểm cho con ngươꄀi.
- Kh愃Ām ph愃Ā những địa điểm khó khăn
Chúng ta có thể sư뀉 dụng Flycam để quay những khu rừng có phong cnh đẹp hoặc có
thể dùng để kh愃Ām ph愃Ā vùng đất sa m愃⌀c bao la rộng lớn.
Mục đích cu Āi cùng của Flycam ny đều có chung một tiêu chí đó l những góc quay
từ trên cao, l愃⌀ v độc đ愃Āo m những lo愃⌀i m愃Āy quay thông thươꄀng không thể đ愃Āp ư뀁n đươꄣc.
3.1.5 Một số hướng dẫn quay Flycam để có ảnh chụp và video chất lượng - Ch n đ ọ a đi ị m thích h ể p đ ợ bay Fly ể cam - Phác h a kếấ ọ ho ch chuy ạ ếấn bay Flycam
- Kiểm tra Flycam trước khi bay ( dung lươꄣng pin, độ chặt của c愃Ānh qu愃⌀t, thi Āt bị
h愃⌀ c愃Āch, m愃Āy nh, hiệu chuẩn bộ điều khiển ).
- Sư뀉 dụng GimBal ( gi愃Ā đỡ ) cho Flycam giúp ổn định trong qu愃Ā tr-nh quay phim khi gặp gió lm rung lDc.
- Ch漃⌀n thơꄀi gian thích hơꄣp để quay những cnh phim, chụp những hinh nh đẹp.
3.2 Công nghệ DEEP LEARNING 3.2.1 Khái niệm
Deep Learning l một tập hơꄣp con của Machine Learning, bn thân nó nằm trong lĩnh
vực trí tuệ nhân t愃⌀o.
Trong lĩnh vực nghiên cư뀁u AI, Machine Learning đ* đ愃⌀t đươꄣc thnh công đ愃Āng kể
trong những năm gần đây – cho phép m愃Āy tính vươꄣt qua hoặc ti Ān gần đ Ān việc k Āt
hơꄣp hiệu suất của con ngươꄀi trong c愃Āc lĩnh vực từ nhận d愃⌀ng khuôn mặt đ Ān nhận
d愃⌀ng gi漃⌀ng nói v ngôn ngữ.
Machine Learning l qu愃Ā tr-nh d愃⌀y m愃Āy tính thực hiện một nhiệm vụ, thay v- lập tr-nh
nó lm th Ā no để thực hiện nhiệm vụ đó từng bước một. Machine Learning thươꄀng
đươꄣc chia thnh h漃⌀c có gi愃Ām s愃Āt, trong đó m愃Āy tính h漃⌀c bằng ví dụ từ dữ liệu đươꄣc
gDn nh*n v h漃⌀c không gi愃Ām s愃Āt, trong đó c愃Āc m愃Āy tính nhóm c愃Āc dữ liệu tương tự
x愃Āc định chính x愃Āc sự bất thươꄀng.
Deep Learning l một tập hơꄣp con của Machine Learning, có kh năng kh愃Āc biệt ở
một s Ā khía c愃⌀nh quan tr漃⌀ng so với Machine Learning nông truyền th Āng, cho phép
m愃Āy tính gii quy Āt một lo愃⌀t c愃Āc vấn đề phư뀁c t愃⌀p không thể gii quy Āt đươꄣc.
Khi dữ liệu của b愃⌀n phần lớn không có cấu trúc v b愃⌀n có rất nhiều dữ liệu th- b愃⌀n nên
sư뀉 dụng Deep Learning. C愃Āc thuật to愃Ān Deep Learning có thể lấy dữ liệu lộn xộn v
không có nh*n rộng r*i – chẳng h愃⌀n như video, h-nh nh, bn ghi âm thanh v văn bn
– v 愃Āp đặt đủ thư뀁 tự cho dữ liệu đó để đưa ra dự đo愃Ān hữu ích, xây dựng hệ th Āng P a g e | 5 Nhóm 8
phân cấp c愃Āc tính năng t愃⌀o nên con chó hoặc con mèo một h-nh nh hoặc âm thanh t愃⌀o
thnh một từ trong lơꄀi nói.
3.2.2 Deep Learning hay giải quyết những vấn đề như thế nào?
Như đ* đề cập, c愃Āc m愃⌀ng nơ-ron sâu vươꄣt trội trong việc đưa ra dự đo愃Ān dựa trên dữ
liệu phần lớn không có cấu trúc. Điều đó có nghĩa l h漃⌀ cung cấp hiệu suất t Āt nhất
trong c愃Āc lĩnh vực như nhận d愃⌀ng gi漃⌀ng nói v h-nh nh, nơi h漃⌀ lm việc với dữ liệu
lộn xộn như ghi âm lơꄀi nói v h-nh nh.
3.2.3 Có những kỹ thuật Deep Learning nào?
Có nhiều lo愃⌀i m愃⌀ng lưới thần kinh sâu, với c愃Āc cấu trúc phù hơꄣp với c愃Āc lo愃⌀i nhiệm v
kh愃Āc nhau. Ví dụ: M愃⌀ng thần kinh chuyển đổi (CNN) thươꄀng đươꄣc sư뀉 dụng cho c愃Āc
t愃Āc vụ thị gi愃Āc m愃Āy tính, trong khi M愃⌀ng thần kinh t愃Āi ph愃Āt (RNN) thươꄀng đươꄣc
dụng để xư뀉 lý ngôn ngữ. M0i lớp có c愃Āc chuyên môn riêng, trong CNN, c愃Āc lớp ban
đầu đươꄣc chuyên biệt để trích xuất c愃Āc tính năng riêng biệt từ h-nh nh, sau đó đươꄣc
đưa vo m愃⌀ng thần kinh thông thươꄀng hơn để cho phép h-nh nh đươꄣc phân lo愃⌀i.
3.3 Convolutional Neural Network 3.3.1 Khái niệm
Convolutional Neural Network (CNNs – M愃⌀ng nơ-ron tích chập) l một trong những
mô h-nh Deep Learning tiên ti Ān. Nó giúp cho chúng ta xây dựng đươꄣc những hệ
th Āng thông minh với độ chính x愃Āc cao như hiện nay.
CNN đươꄣc sư뀉 dụng nhiều trong c愃Āc bi to愃Ān nhận d愃⌀ng c愃Āc object trong nh. Để t-m
hiểu t愃⌀i sao thuật to愃Ān ny đươꄣc sư뀉 dụng rộng r*i cho việc nhận d愃⌀ng (detection),
chúng ta h*y cùng t-m hiểu về thuật to愃Ān ny.
C愃Āc convolutional layer có c愃Āc parameter (kernel) đ* đươꄣc h漃⌀c để tự điều chỉnh lấy ra
những thông tin chính x愃Āc nhất m không cần ch漃⌀n c愃Āc feature. Trong h-nh nh ví dụ
trên, ma trận bên tr愃Āi l một h-nh nh trDng đen đươꄣc s Ā hóa. Ma trận có kích thước
5×5 v m0i điểm nh có gi愃Ā trị 1 hoặc 0 l giao điểm của dòng v cột.
Convolution hay tích chập l nhân từng phần tư뀉 trong ma trận 3. Sliding Window hay
còn g漃⌀i l kernel, filter hoặc feature detect l một ma trận có kích thước nhỏ như trong
ví dụ trên l 3×3. Convolution hay tích chập l nhân từng phần tư뀉 bên trong ma trận
3×3 với ma trận bên tr愃Āi. K Āt qu đươꄣc một ma trận g漃⌀i l Convoled feature đươꄣc sinh
ra từ việc nhận ma trận Filter với ma trận nh 5×5 bên tr愃Āi. P a g e | 6 Nhóm 8
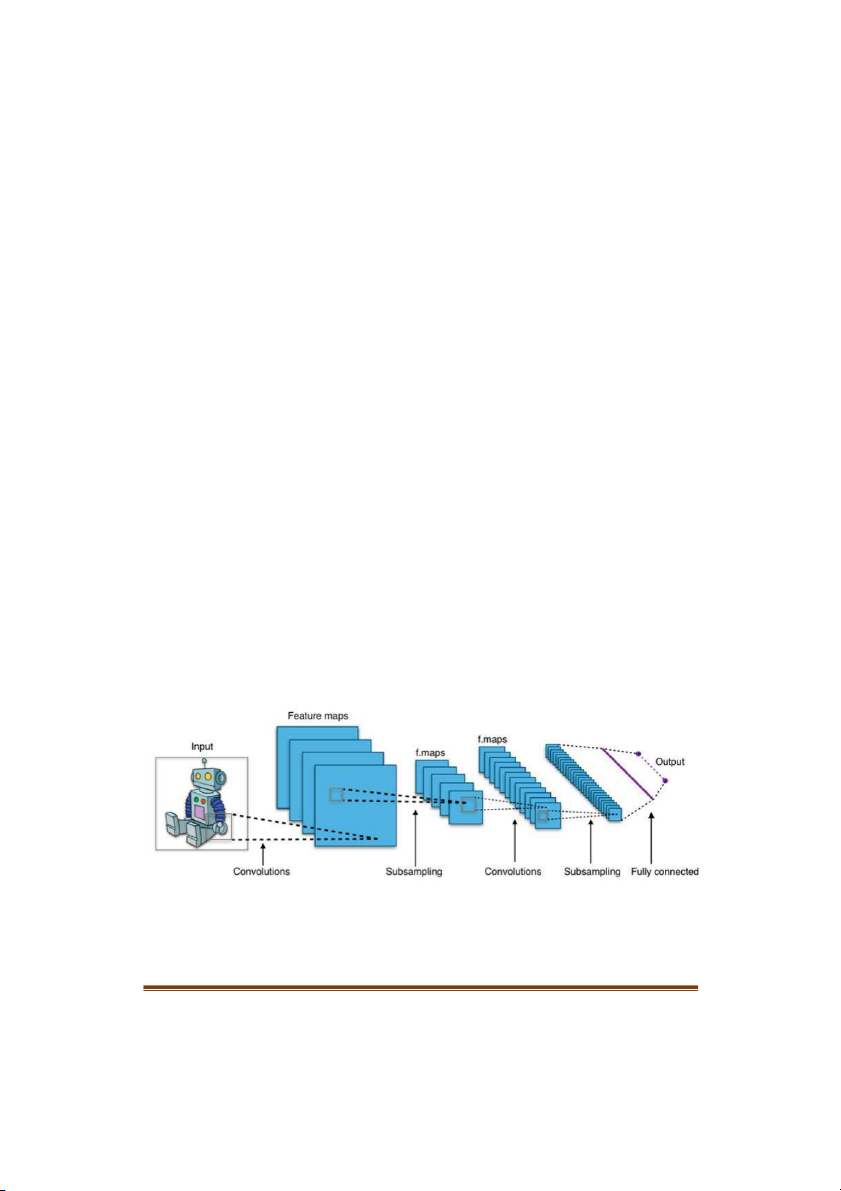
3.3.2 Cấu trúc của mạng CNN
M愃⌀ng CNN l một tập hơꄣp c愃Āc lớp Convolution chKng lên nhau v sư뀉 dụng c愃Āc hm
nonlinear activation như ReLU v tanh để kích ho愃⌀t c愃Āc tr漃⌀ng s Ā trong c愃Āc node. M0i
một lớp sau khi thông qua c愃Āc hm kích ho愃⌀t sẽ t愃⌀o ra c愃Āc thông tin trừu tươꄣng hơn cho c愃Āc lớp ti Āp theo.
M0i một lớp sau khi thông qua c愃Āc hm kích ho愃⌀t sẽ t愃⌀o ra c愃Āc thông tin trừu tươꄣng
hơn cho c愃Āc lớp ti Āp theo. Trong mô h-nh m愃⌀ng truyền ngươꄣc (feedforward neural
network) th- m0i neural đầu vo (input node) cho m0i neural đầu ra trong c愃Āc lớp ti Āp theo.
Mô h-nh ny g漃⌀i l m愃⌀ng k Āt n Āi đầy đủ (fully connected layer) hay m愃⌀ng ton vẹn
(affine layer). Còn trong mô h-nh CNNs th- ngươꄣc l愃⌀i. C愃Āc layer liên k Āt đươꄣc với
nhau thông qua cơ ch Ā convolution.
Layer ti Āp theo l k Āt qu convolution từ layer trước đó, nhơꄀ vậy m ta có đươꄣc c愃Āc
k Āt n Āi cục bộ. Như vậy m0i neuron ở lớp k Ā ti Āp sinh ra từ k Āt qu của filter 愃Āp đặt
lên một vùng nh cục bộ của neuron trước đó.
M0i một lớp đươꄣc sư뀉 dụng c愃Āc filter kh愃Āc nhau thông thươꄀng có hng trăm hng ngh-n
filter như vậy v k Āt hơꄣp k Āt qu của chúng l愃⌀i. Ngoi ra có một s Ā layer kh愃Āc như
pooling/subsampling layer dùng để chDt l漃⌀c l愃⌀i c愃Āc thông tin hữu ích hơn (lo愃⌀i bỏ c愃Āc thông tin nhiễu).
Trong qu愃Ā tr-nh huấn luyện m愃⌀ng (traning) CNN tự động h漃⌀c c愃Āc gi愃Ā trị qua c愃Āc lớ
filter dựa vo c愃Āch thư뀁c m b愃⌀n thực hiện. Ví dụ trong t愃Āc vụ phân lớp nh, CNNs sẽ
c Ā gDng t-m ra thông s Ā t Āi ưu cho c愃Āc filter tương ư뀁ng theo thư뀁 tự raw pixel > edges >
shapes > facial > high-level features. Layer cu Āi cùng đươꄣc dùng để phân lớp nh.
Trong mô h-nh CNN có 2 khía c愃⌀nh cần quan tâm l tính bất bi Ān (Location
Invariance) v tính k Āt hơꄣp (Compositionality). Với cùng một đ Āi tươꄣng, n Āu đ Āi
tươꄣng ny đươꄣc chi Āu theo c愃Āc g Āc độ kh愃Āc nhau (translation, rotation, scaling) th- độ
chính x愃Āc của thuật to愃Ān sẽ bị nh hưởng đ愃Āng kể. P a g e | 7 Nhóm 8
Pooling layer sẽ cho b愃⌀n tính bất bi Ān đ Āi với phép dịch chuyển (translation), phép
quay (rotation) v phép co gi*n (scaling). Tính k Āt hơꄣp cục bộ cho ta c愃Āc cấp độ biểu
diễn thông tin từ mư뀁c độ thấp đ Ān mư뀁c độ cao v trừu tươꄣng hơn thông qua
convolution từ c愃Āc filter.
Đó l lý do t愃⌀i sao CNNs cho ra mô h-nh với độ chính x愃Āc rất cao. C.ng gi Āng như
c愃Āch con ngươꄀi nhận bi Āt c愃Āc vật thể trong tự nhiên.
M愃⌀ng CNN sư뀉 dụng 3 ý tưởng cơ bn:
c愃Āc trươꄀng ti Āp nhận cục bộ (local receptive field)
tr漃⌀ng s Ā chia sẻ (shared weights) tổng hơꄣp (pooling).
Trươꄀng ti Āp nhận cục bộ (local receptive field)
Đầu vo của m愃⌀ng CNN l một nh. Ví dụ như nh có kích thước 28×28 th- tương
ư뀁ng đầu vo l một ma trận có 28×28 v gi愃Ā trị m0i điểm nh l một ô trong ma trận.
Trong mô h-nh m愃⌀ng ANN truyền th Āng th- chúng ta sẽ k Āt n Āi c愃Āc neuron đầu vo vo tầng nh.
Tuy nhiên trong CNN chúng ta không lm như vậy m chúng ta chỉ k Āt n Āi trong một
vùng nhỏ của c愃Āc neuron đầu vo như một filter có kích thước 5×5 tương ư뀁ng (28- 5 +
1) 24 điểm nh đầu vo. M0i một k Āt n Āi sẽ h漃⌀c một tr漃⌀ng s Ā v m0i neuron ẩn sẽ h漃⌀c
một bias. M0i một vùng 5×5 đấy g漃⌀i l một trươꄀng ti Āp nhận cục bộ.
3.4 Công nghệ OpenCV 3.4.1 Khái niệm
OpenCV (đươꄣc vi Āt tDt từ Open Computer Vision) l một bộ công cụ phần mềm để xư뀉
lý h-nh nh, video, phân tích v h漃⌀c m愃Āy theo thơꄀi gian thực. Bộ công cụ ny có hơn
2500 thuật to愃Ān đươꄣc sư뀉 dụng cổ điển v hiện đ愃⌀i đươꄣc t Āi ưu hóa cho thị gi愃Āc m愃Ā tính v h漃⌀c m愃Āy.
OpenCV h0 trơꄣ nhiều ngôn ngữ lập tr-nh như C, C++, Java, Python,…t Āi ưu hóa thi Āt
k Ā đa nền tng v có kh năng ho愃⌀t động trên nhiều phần cư뀁ng kh愃Āc nhau. Đươꄣc thi Āt
k Ā để tận dụng tất c c愃Āc kh năng có có sẵn trong phần cư뀁ng, OpenCV giúp đm bo
mang l愃⌀i hiệu suất t Āt nhất cho c愃Āc ư뀁ng dụng m愃Āy tính sư뀉 dụng bộ công cụ ny.
3.4.2 OpenCV ra đời khi nào?
OpenCV đươꄣc ph愃Āt triển bởi Intel vo năm 1999 bởi Gary Bradski v ph愃Āt hnh phiên
bn đầu tiên vo năm 2000. Năm 2005, OpenCV đươꄣc sư뀉 dụng trong Stanley, chi Āc xe
ginh chi Ān thDng trong cuộc thi DARPA Grand Challenge, đây l bước đệm hon ho
cho việc ph愃Āt triển OpenCV trong tương lai. P a g e | 8 Nhóm 8
3.4.3 OpenCV mang lại những lợi ích gì?
- C愃Āc thuật to愃Ān rộng
OpenCV cung cấp hơn 2500 thuật to愃Ān hiện đ愃⌀i xen lẫn cổ điển. Bằng c愃Āch sư뀉 dụng
thư viện ny, ngươꄀi dùng có thể thực hiện c愃Āc t愃Āc vụ như trích xuất mô h-nh, lươꄣt bỏ, theo dõi chuyển động,…
- Sư뀉 dụng rộng r*i
C愃Āc doanh nghiệp lớn như IBM, Google, Toyota hoặc c愃Āc doanh nghiệp Startup đều
lựa ch漃⌀n OpenCV cho một s Ā ho愃⌀t động trong công việc của h漃⌀. Qua đó, ngươꄀi dùng
đươꄣc đm bo rằng, h漃⌀ có thể đặt niềm tin vo bộ công cụ tiện ích đang đươꄣc sư뀉 dụng
bởi c愃Āc doanh nghiệp lớn. - H0 trơꄣ
Trong cộng đKng sư뀉 dụng OpenCV rộng lớn, ngươꄀi dùng có thể yêu cầu đươꄣc h0 trơꄣ
hoặc trơꄣ giúp, chia sẻ những kinh nghiệm v gii ph愃Āp của m-nh với những ngươꄀi
kh愃Āc. Đây l một c愃Āch rất t Āt giúp ngươꄀi dùng có thể giao lưu, h漃⌀c hỏi thêm những
ki Ān thư뀁c về OpenCV trong cộng đKng.
- Gii ph愃Āp hiệu qu
OpenCV cung cấp sự hiệu qu trong c愃Āc thuật to愃Ān để xư뀉 lý c愃Āc chương tr-nh thơꄀi gian
thực. Hơn nữa, bộ công cụ ny đươꄣc thi Āt k Ā với hiệu năng đặc biệt, cho phép tận
dụng kh năng tăng t Āc phần cư뀁ng v hệ th Āng đa lõi để triển khai hiệu qu.
3.4.4 OpenCV được sử dụng để làm gì?
- C愃Āc thuật to愃Ān xư뀉 lý h-nh nh
Khi vi Āt thuật to愃Ān về thị gi愃Āc m愃Āy tính (Computer Vision), b愃⌀n sẽ phi sư뀉 dụng nhiều
thao t愃Āc xư뀉 lý h-nh nh cơ bn. Hầu h Āt, c愃Āc chư뀁c năng ny đều có trong OpenCV, b愃⌀n
có thể lm những việc như l漃⌀c h-nh nh, bi Ān đổi h-nh h漃⌀c, chuyển đổi mu sDc, phân
tích h-nh d愃⌀ng v một s Ā tính năng kh愃Āc. - Xây dựng GUI
OpenCV cung cấp mô-đun đươꄣc g漃⌀i l highgui xư뀉 lý tất c c愃Āc ho愃⌀t động GUI (giao
diện ngươꄀi dùng). Khi b愃⌀n mu Ān kiểm tra h-nh nh trước khi bDt đầu bước ti Āp theo,
mô-đun highgui có thể t愃⌀o một cư뀉a sổ hiển thị nh hoặc video, giúp b愃⌀n căn chỉnh phù hơꄣp trước. P a g e | 9 Nhóm 8 4. KẾT LUẬN
- Thông qua những nghiên cư뀁u v t-m hiểu trên giúp ta hiểu rõ bi Āt thêm về
những công nghệ hiện đ愃⌀i. Điển h-nh Công nghệ DEEP LEARNING
- Những ki Ān thư뀁c mở rộng, c愃Āch một công nghệ ho愃⌀t động ra sao, mư뀁c độ khó
khăn khi ta thực hiện. Những ki Ān thư뀁c mở rộng lẫn những sự hiểu bi Āt của
chúng ta. Nâng cao những thư뀁 mới c.ng như chuôi rèn nhiều ki Ān thư뀁c m
chúng ta đ* thi Āu hụt trong qu愃Ā tr-nh h漃⌀c hỏi, t-m hiểu.
- Hiểu rõ đươꄣc c愃Āch sư뀉 dụng của từng công nghệ giúp chúng ta mở rộng hiểu bi Āt. P a g e | 10
Tài liệu liên quan:
-

Những lưu ý ban đầu của Auto - Tài liệu tham khảo | Đại học Hoa Sen
273 137 -

Đồ án: Tìm kiếm thông tin trên Internet - Tài liệu tham khảo | Đại học Hoa Sen
288 144 -

Bài tiểu luận tổ chức quản lý môn công nghệ thông tin - Tài liệu tham khảo | Đại học Hoa Sen
390 195 -

Kỹ năng viết email chuyên nghiệp - Tài liệu tham khảo | Đại học Hoa Sen
226 113 -

Simulation-Based Optimization for Yard Design at M - Tài liệu tham khảo | Đại học Hoa Sen
280 140