BÁO CÁO THỰC HÀNH MÔN CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
BÁO CÁO THỰC HÀNH MÔN CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA. TÀI LIỆU ĐƯỢC SƯU TẦM GỒM 45 TRANG. MỜI CÁC BẠN THAM KHẢO
Môn: Tự động điều khiển (Automotive Engineerings) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:













Preview text:
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HCM
KHOA ĐIỆN ĐIỆN TỬ ----🕮🙞----
MÔN HỌC : CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA BÀI BÁO CÁO
ĐỀ TÀI: XE DÒ LINE VÀ TRÁNH VẬT CẢN
GVHD: ThS . NGUYỄN TRẦN MINH NGUYỆT SVTH Nhóm 7 :
Nguyễn Lâm Hoàng Bửu - 25151150
Duy Đoàn Minh Hiển - 25151197
Nguyễn Anh Khoa - 25151233
Nguyễn Duy Khánh - 25151227
Mã lớp học : 251513
Thành phố Hồ Chí Minh, Ngày 29 Tháng 10 năm 2025 MỤC LỤC
Phần 1:Tổng quan về đề tài.................................................................................
I.Lý do chọn đề tài................................................................................................................
II.Mục đích đề tài.................................................................................................
III.Đối tượng và phạm vi nghiên cứu..................................................................
IV.Phương pháp nghiên cứu ...............................................................................
Phần 2: Tổng quan lý thuyết................................................................................
I. Tổng quan về Arduino Uno R3.........................................................................
1. Giới thiệu về Arduino Uno R3..........................................................................
II.Giới thiệu về L298............................................................................................
III.Giới thiệu về cảm biến hồng ngoại...................................................................
IV.Giới thiệu về cảm biến siêu âm.........................................................................
V.Giới thiệu về động cơ DC...................................................................................
VI.Giao tiếp giữa Arduino Uno R3,cảm biến hồng ngoại,cảm biến siêu
âm............................................................................................................................
Phần 3:Tổng quan kỹ thuật và xây dựng..................................................................
I.Cấu trúc robot xe dò line........................................................................................
II. Xây dựng dự án....................................................................................................
Phần 4: Kết luận và thảo luận...................................................................................
I.Kết quả...................................................................................................................
II.Hạn chế.................................................................................................................
III.Biện pháp khắc phục............................................................................................
IV.Cải tiến thêm.........................................................................................................
V.Kết luận................................................................................................................... LỜI CẢM ƠN
Chúng em xin bày tỏ lòng biết ơn sâu sắc tới …. người đã dành nhiều thời
gian, kiến thức và nhiệt huyết quý báu để hướng dẫn cũng như đánh giá báo cáo
cuối kỳ của nhóm. Nhờ sự hỗ trợ của Cô, chúng em đã có cơ hội mở rộng hiểu biết,
rèn luyện kỹ năng và ngày càng tiến bộ hơn trong lĩnh vực đam mê.
Nếu không có sự chỉ dẫn tận tình và chân thành từ Cô , báo cáo này khó có
thể hoàn thành một cách trọn vẹn. Từ những buổi giảng dạy, các buổi trao đổi trực
tiếp cho đến những góp ý thẳng thắn, Cô đã cung cấp cho chúng em những phương
pháp làm việc chuyên nghiệp cùng kiến thức vững chắc, giúp nhóm vượt qua
những thử thách trong suốt quá trình thực hiện.
Không chỉ thu nhận kiến thức chuyên môn, chúng em còn học được cách
làm việc khoa học, logic và tính chủ động trong nghiên cứu để tự giải quyết những
vấn đề phát sinh. Đây thực sự là những kinh nghiệm quý giá, giúp chúng em tự tin
và vững vàng hơn khi tham gia các dự án tiếp theo.
Một lần nữa, nhóm chúng em xin kính chúc Cô Nguyễn Trần Minh Nguyệt
sức khỏe dồi dào, gặt hái nhiều thành công trong sự nghiệp giảng dạy và nghiên
cứu. Chúng em hy vọng rằng những kinh nghiệm và tâm huyết của Cô sẽ tiếp tục
lan tỏa, truyền cảm hứng cho nhiều thế hệ sinh viên mai sau.
NHẬN XÉT CỦA GIẢNG VIÊN
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
........................................................................................................
Điểm :............................. Kí Tên
DANH SÁCH NHÓM THAM GIA BÁO CÁO
HỌC KÌ 1,NĂM HỌC 2025-2026
Tên đề tài : Xe dò line và tránh vật cản STT HỌ VÀ TÊN MSSV HOÀN THÀNH 1 Duy Đoàn Minh 25151197 100% Hiển 2 Nguyễn Lâm 25151150 100% Hoàng Bửu 3 Nguyễn Anh Khoa 25151233 100% 4 Đoàn Duy Khánh 25151227 100%
Phần 1: Tổng quan về đề tài
A. Lý do chọn đề tài:
Với sự phát triển vượt bậc của công nghệ tự động hóa và trí tuệ nhân tạo, robot
tự hành đang trở thành xu hướng tất yếu trong nhiều ngành công nghiệp và đời sống.
Các xe tự hành có khả năng tự di chuyển mà không cần sự can thiệp của con người,
được sử dụng rộng rãi trong các nhà máy, kho vận, bệnh viện và thậm chí trong giao
thông. Việc nghiên cứu và chế tạo robot tự hành có khả năng tránh vật cản và dò line
không chỉ giúp tiết kiệm sức lao động mà còn tăng cường hiệu suất hoạt động của hệ
thống. Do đó, lựa chọn đề tài này sẽ giúp sinh viên tiếp cận những công nghệ tiên
tiến và nắm bắt xu hướng hiện đại trong ngành kỹ thuật và công nghệ.
Các robot tự hành có khả năng tránh vật cản và dò line được sử dụng rất nhiều
trong môi trường sản xuất công nghiệp, vận chuyển hàng hóa, và các hệ thống
logistic tự động. Hệ thống dò line giúp robot di chuyển theo đường đã định sẵn trong
môi trường có bố cục rõ ràng, trong khi hệ thống tránh vật cản đảm bảo rằng robot có
thể tự điều chỉnh hành vi khi gặp phải chướng ngại. Nhờ tính năng này, robot có thể
hoạt động an toàn và hiệu quả hơn trong môi trường có nhiều yếu tố bất định.
Đề tài xe tự hành tránh vật cản và dò line yêu cầu sự kết hợp chặt chẽ giữa kiến
thức lý thuyết và kỹ năng thực hành. Sinh viên cần nắm vững các kiến thức về hệ
thống điều khiển tự động, xử lý tín hiệu từ cảm biến, và lập trình vi điều khiển để
phát triển hệ thống điều khiển. Bên cạnh đó, sinh viên còn được ứng dụng các thuật
toán xử lý như PID, thuật toán tìm đường, và các kỹ thuật điều khiển động cơ. Đây là
cơ hội để sinh viên nâng cao khả năng tư duy hệ thống, giải quyết vấn đề và phát
triển kỹ năng làm việc nhóm.
Việc nghiên cứu và phát triển robot tránh vật cản và dò line không chỉ dừng lại
ở mô hình robot di chuyển trong môi trường giới hạn. Đề tài này có tiềm năng mở rộng
trong nhiều lĩnh vực như robot phục vụ trong y tế, giao thông thông minh, và khám
phá vũ trụ. Đặc biệt, những tiến bộ về trí tuệ nhân tạo có thể giúp tích hợp thêm nhiều
khả năng như tự học hỏi, tự tối ưu hóa hành vi di chuyển, và tương tác với môi trường
phức tạp hơn. Đặc biệt, những tiến bộ về trí tuệ nhân tạo có thể giúp tích hợp thêm
nhiều khả năng như tự học hỏi, tự tối ưu hóa hành vi di chuyển, và tương tác với môi trường phức tạp hơn.
Chọn đề tài này giúp sinh viên phát triển các kỹ năng cần thiết trong các lĩnh
vực hot như điều khiển tự động, công nghệ robot, trí tuệ nhân tạo và IoT. Nhu cầu về
kỹ sư tự động hóa và chuyên gia robot đang tăng cao trên thị trường lao động, và việc
thực hiện đề tài này sẽ giúp sinh viên có lợi thế cạnh tranh khi ứng tuyển vào các vị trí
công nghệ cao trong tương lai.
B. Mục đích đề tài:
Đầu tiên của đề tài là thiết kế và chế tạo một mô hình xe tự hành có khả năng
di chuyển tự động. Xe sẽ được trang bị các cảm biến và bộ điều khiển để có thể tự định
hướng, nhận diện vật cản, và di chuyển một cách an toàn mà không cần sự can thiệp của con người
Xây dựng một hệ thống tránh vật cản hiệu quả là một trong những mục tiêu
quan trọng nhất. Xe cần có khả năng phát hiện và phân tích khoảng cách từ các vật cản
thông qua các cảm biến như siêu âm hoặc hồng ngoại. Hệ thống điều khiển cần xử lý
thông tin này theo thời gian thực và ra quyết định điều chỉnh hướng di chuyển của xe để tránh va chạm.
Phát triển hệ thống dò line (line-following), giúp xe có thể nhận diện và di
chuyển theo một đường đã vạch sẵn (thường là một vạch màu đen hoặc trắng trên bề
mặt). Hệ thống dò line cần hoạt động chính xác để đảm bảo xe luôn giữ được quỹ đạo
di chuyển mong muốn trong môi trường định sẵn.
Thuật toán điều khiển PID (Proportional-Integral-Derivative) sẽ được ứng dụng
để tối ưu hóa quá trình điều khiển. Mục tiêu là đảm bảo xe di chuyển mượt mà, ổn định
và chính xác khi gặp phải các thay đổi về hướng hoặc tốc độ. PID giúp điều chỉnh sự
khác biệt giữa vị trí thực tế của xe và vị trí mong muốn, cải thiện độ chính xác và hiệu suất điều khiển
Hệ thống cảm biến sẽ cung cấp dữ liệu về môi trường xung quanh, bao gồm vị
trí các vật cản và đường dẫn. Mục tiêu của đề tài là xử lý dữ liệu cảm biến này một cách
hiệu quả để xe có thể phản ứng kịp thời và chính xác với những thay đổi trong môi trường.
Sau khi hệ thống xe tự hành hoàn thành, mục tiêu là tiến hành các bài kiểm tra thực tế
để đánh giá hiệu quả của các chức năng tránh vật cản và dò line. Qua các thử nghiệm,
cần tối ưu hóa các thuật toán điều khiển và xử lý dữ liệu để đảm bảo hệ thống hoạt
động ổn định trong mọi điều kiện môi trường
Cuối cùng là giúp sinh viên rèn luyện và phát triển kỹ năng thực hành, lập trình,
và tư duy logic trong quá trình giải quyết các vấn đề kỹ thuật thực tế. Đồng thời, sinh
viên sẽ học cách phối hợp giữa lý thuyết và thực tiễn để hoàn thiện một sản phẩm công
nghệ hữu ích và có giá trị ứng dụng cao.
C. ĐỐI TƯỢNG VÀ PHẠM VI NGHIÊN CỨU
1. ĐỐI TƯỢNG NGHIÊN CỨU:
Đối tượng nghiên cứu của xe dò line là hệ thống điều khiển tự động, bao gồm
các cảm biến (hồng ngoại, quang học), vi điều khiển, động cơ và thuật toán điều
khiển. Đề tài này tập trung vào việc nghiên cứu và phát triển một hệ thống xe tự
hành có khả năng tự động dò line (theo dõi vạch đường) và tránh các vật cản trong
quá trình di chuyển. Hệ thống sử dụng cảm biến hồng ngoại để dò line và cảm biến
siêu âm để phát hiện vật cản. Bên cạnh đó, thuật toán PID được áp dụng để điều
khiển chuyển động của xe, giúp duy trì sự ổn định và phản ứng nhanh chóng khi
phát hiện các yếu tố cản trở.
2. PHẠM VI NGHIÊN CỨU
Phạm vi nghiên cứu chủ yếu tập trung vào việc thiết kế và lập trình xe dò line trong
môi trường có đường đi rõ ràng. Nghiên cứu bao gồm các thuật toán điều khiển giúp xe
di chuyển theo tuyến đường xác định, sử dụng cảm biến để nhận diện đường và điều
khiển động cơ để đạt được độ chính xác.
3. MỤC TIÊU NGHIÊN CỨU
Mục tiêu nghiên cứu là tối ưu hóa hiệu suất của xe dò line, đảm bảo khả năng
hoạt động ổn định và chính xác trong các tình huống khác nhau. Điều này bao gồm
việc cải thiện khả năng nhận diện đường trong các điều kiện ánh sáng thay đổi, xử lý
đường cong và yếu tố môi trường tác động đến hoạt động của xe.
D. PHƯƠNG PHÁP NGHIÊN CỨU
1. PHÂN TÍCH VÀ LỰA CHỌN CẢM BIẾN
Nghiên cứu lựa chọn các loại cảm biến phù hợp (như cảm biến hồng ngoại, quang
học) để nhận diện đường. Việc này bao gồm phân tích ưu nhược điểm của từng loại cảm
biến trong các điều kiện môi trường khác nhau, cũng như khả năng đo lường và độ chính xác của chúng.
2. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN
Nghiên cứu và thiết kế hệ thống điều khiển, bao gồm lựa chọn vi điều khiển (ví
dụ: Arduino, Raspberry Pi) và lập trình các thuật toán điều khiển để xe có thể theo dõi
đường line một cách chính xác. Thuật toán điều khiển có thể bao gồm các phương pháp như PID
(Proportional-Integral-Derivative) để cải thiện độ ổn định và chính xác khi xe di chuyển.
3. MÔ PHỎNG VÀ THỬ NGHIỆM
Tiến hành mô phỏng hệ thống trong môi trường ảo để kiểm tra hiệu quả của các
thuật toán và cảm biến trước khi triển khai vào thực tế. Sau đó, thử nghiệm xe trong các
điều kiện thực tế, đánh giá khả năng hoạt động của xe trên các tuyến đường với các yếu
tố thay đổi như ánh sáng, độ cong của đường và các yếu tố ngoại cảnh.
4. TỐI ƯU HÓA VÀ CẢI TIẾN
Dựa trên kết quả thử nghiệm, tiếp tục tối ưu hóa các thành phần của hệ thống như
độ chính xác của cảm biến, hiệu suất động cơ, và thuật toán điều khiển để xe có thể di
chuyển nhanh chóng và chính xác hơn trong các điều kiện khác nhau.
5. ĐÁNH GIÁ VÀ PHÂN TÍCH KẾT QUẢ
Cuối cùng, đánh giá kết quả thu được từ các thử nghiệm thực tế và phân tích độ
ổn định, độ chính xác, và khả năng điều khiển của xe. Từ đó, rút ra bài học và đề xuất
cải tiến cho các phiên bản xe dò line sau.
PHẦN 2: TỔNG QUAN LÝ THUYẾT A. Arduino UNO R3
Arduino Uno R3 là một bo mạch vi điều khiển phổ biến trong lĩnh vực điện tử và
lập trình nhúng, được phát triển bởi Arduino Team (Ý). Đây là phiên bản thứ ba của
dòng Arduino Uno và cũng là phiên bản được sử dụng rộng rãi nhất hiện nay trong
giảng dạy, nghiên cứu và chế tạo các sản phẩm công nghệ.
1.Cấu Tạo Và Phần Cứng Chính
Arduino Uno R3 sử dụng vi điều khiển ATmega328P của hãng Atmel, với các đặc điểm chính:
-Điện áp hoạt động: 5V
-Nguồn cấp: 7V – 12V (từ adapter hoặc cổng USB)
-Số chân digital I/O: 14 chân (trong đó 6 chân có thể xuất xung PWM)
-Số chân analog input: 6 chân -Bộ nhớ Flash: 32 KB
-Tốc độ xung nhịp: 16 MHz
-Giao tiếp: USB type-B để nạp chương trình và giao tiếp với máy tính
2. Chức Năng Và Nguyên Lý Hoạt Động
Arduino Uno R3 hoạt động như một bộ não trung tâm, có thể:
-Nhận tín hiệu đầu vào từ cảm biến (như cảm biến nhiệt độ, ánh sáng, khoảng cách, v.v.)
-Xử lý dữ liệu theo chương trình được lập trình sẵn
-Xuất tín hiệu điều khiển đến các thiết bị đầu ra (như LED, động cơ, relay, màn hình LCD, v.v.)
Người dùng lập trình cho Arduino bằng ngôn ngữ Arduino (C/C++) thông qua phần mềm
Arduino IDE. Sau khi biên dịch, chương trình được nạp trực tiếp qua cổng USB vào bo mạch để thực thi.
3. Ưu Điểm , Ứng Dụng Và Kết Luận
Arduino Uno R3 là một bo mạch vi điều khiển mạnh mẽ và dễ sử dụng, có ưu điểm nổi
bật là giá rẻ, dễ học, dễ lập trình, và tương thích với nhiều cảm biến, module mở rộng.
Nhờ cộng đồng hỗ trợ rộng lớn và mã nguồn mở, Arduino Uno R3 rất phù hợp cho cả
người mới bắt đầu lẫn người nghiên cứu chuyên sâu. Bo mạch này được ứng dụng rộng
rãi trong giáo dục, chế tạo robot, hệ thống tự động hóa và các dự án nhà thông minh. Với
tính linh hoạt và khả năng mở rộng cao, Arduino Uno R3 là nền tảng lý tưởng giúp người
học khám phá, sáng tạo và hiện thực hóa ý tưởng công nghệ.
Hình ảnh Arduino Uno R3
B. Mạch công suất L298
L298 là một mạch tích hợp điều khiển động cơ cầu H kép (Dual H-Bridge Motor
Driver) được sử dụng phổ biến trong các hệ thống điều khiển động cơ DC và động cơ bước.
Mạch này được sản xuất bởi STMicroelectronics, có khả năng điều khiển tốc độ và chiều
quay của hai động cơ DC độc lập hoặc một động cơ bước hai pha. Nhờ khả năng chịu tải
cao và dễ điều khiển, L298 được sử dụng rộng rãi trong các dự án robot và hệ thống tự động.
1. Cấu Tạo Và Phần Cứng Chính
Mạch L298 có cấu trúc gồm hai cầu H độc lập, mỗi cầu có thể điều khiển một động cơ DC.
Một số đặc điểm kỹ thuật chính của mạch như sau:
-Điện áp cấp cho mạch logic: 5V
-Điện áp điều khiển động cơ (Vs): 5V – 46V
-Dòng điện cực đại mỗi kênh: 2A
-Số kênh điều khiển: 2 (điều khiển được 2 động cơ DC hoặc 1 động cơ bước)
-Ngõ vào điều khiển: 4 chân logic (IN1, IN2, IN3, IN4)
-Ngõ ra điều khiển động cơ: OUT1 – OUT4
-Chân kích hoạt (Enable): ENA và ENB dùng để bật/tắt từng kênh
Tản nhiệt: Có miếng nhôm hoặc bề mặt kim loại giúp thoát nhiệt khi mạch hoạt động tải lớn
2. Chức Năng Và Nguyên Lý Hoạt Động
Mạch L298 hoạt động dựa trên nguyên lý cầu H – một cấu trúc cho phép đổi chiều dòng
điện chạy qua động cơ, từ đó thay đổi chiều quay của động cơ DC.
Khi IN1 = HIGH và IN2 = LOW, động cơ quay theo chiều thuận.
Khi IN1 = LOW và IN2 = HIGH, động cơ quay ngược lại.
Khi cả hai tín hiệu IN1 = IN2, động cơ dừng quay.
Tốc độ động cơ có thể được điều khiển bằng cách điều chỉnh xung PWM đưa vào chân
ENA/ENB. Mạch có thể nhận tín hiệu điều khiển trực tiếp từ Arduino, ESP32, Raspberry
Pi hoặc các vi điều khiển khác.
3. Ưu Điểm, Ứng Dụng Và Kết Luận
Mạch L298 có ưu điểm nổi bật là điều khiển được hai động cơ cùng lúc, chạy ổn định ở
dòng cao (tối đa 2A mỗi kênh), hoạt động linh hoạt với nhiều loại vi điều khiển, và có khả
năng điều khiển tốc độ – chiều quay chính xác.
Mạch được ứng dụng rộng rãi trong các dự án robot di chuyển, xe tự hành, cánh tay robot,
hệ thống điều khiển cửa tự động, mô hình băng chuyền, quạt thông minh, v.v.
Với khả năng điều khiển linh hoạt, độ bền cao và dễ kết nối với các bo mạch như Arduino,
L298 là một giải pháp lý tưởng cho việc điều khiển động cơ trong các hệ thống tự động hóa và robot học. Hình ảnh: L298
C. GIỚI THIỆU VỀ CẢM BIẾN HỒNG NGOẠI 1. Tổng Quan
Cảm biến hồng ngoại (IR) giúp xe dò line nhận diện đường đi thông qua việc phát ra và
nhận tia hồng ngoại phản xạ từ mặt đường. Cảm biến bao gồm một đèn LED hồng ngoại
và một photodiode/phototransistor để nhận tín hiệu.
Hình ảnh: cảm biến hồng ngoại
2. Cấu Tạo Và Nguyên Lý Hoạt Động
Đèn LED hồng ngoại phát ra tia hồng ngoại không thể nhìn thấy.
Photodiode/Phototransistor nhận tia phản xạ từ mặt đường, chuyển thành tín hiệu điện.
Tín hiệu được vi điều khiển xử lý để điều khiển xe.
3. Ứng Dụng Trong Xe Dò Line
Cảm biến giúp nhận diện đường line và điều khiển hướng đi của xe theo đường sáng hoặc
tối, giúp xe di chuyển chính xác trên tuyến đường. 4. Ưu Điểm
Đơn giản và hiệu quả với chi phí thấp.
Phản hồi nhanh, giúp xe điều chỉnh kịp thời.
Khả năng hoạt động ổn định trong điều kiện ánh sáng thay đổi. 5. Nhược Điểm
Phạm vi ngắn, chỉ hoạt động tốt trong khoảng cách gần.
Ảnh hưởng bởi bề mặt đường, có thể gây sai sót khi đường quá sáng hoặc tối. 12
6. Các Loại Cảm Biến Hồng Ngoại
Cảm biến đơn: Một đầu phát và thu, phù hợp với ứng dụng đơn giản.
Cảm biến đa điểm: Nhiều cảm biến giúp nhận diện đường chính xác hơn, phù hợp với xe dò line.
D.GIỚI THIỆU VỀ CẢM BIẾN SIÊU ÂM
1. Tổng Quan Về Cảm Biến Siêu Âm
Cảm biến siêu âm phát ra sóng âm tần số cao (thường trên 20kHz) và đo thời gian sóng
phản xạ trở lại sau khi chạm vào vật thể. Từ đó, nó tính toán được khoảng cách đến vật
cản, giúp xe tránh va chạm và di chuyển an toàn.
Hình ảnh: cảm biến siêu âm HC-SR04
2. Cấu tạo và nguyên lý hoạt động Cảm biến phát phát ra sóng siêu âm.
Cảm biến thu nhận sóng phản xạ từ vật thể.
Vi điều khiển xử lý tín hiệu nhận được để tính toán khoảng cách và điều khiển xe tránh vật cản.
3. Ứng dụng trong xe dò line
Cảm biến siêu âm giúp xe dò line phát hiện và tránh các vật cản trên đường đi, đồng thời
hỗ trợ điều khiển xe tránh khỏi các chướng ngại vật như tường, cột, hoặc vật cản di động. 4. Ưu điểm
Đo khoảng cách chính xác với độ chính xác cao.
Không bị ảnh hưởng bởi ánh sáng như cảm biến hồng ngoại.
Phạm vi đo xa, thường từ vài cm đến vài mét. 5. Nhược điểm
Kích thước lớn hơn so với một số cảm biến khác.
Phạm vi đo hạn chế trong môi trường ồn ào hoặc có nhiều tiếng động siêu âm.
E. Giới thiệu về động cơ DC 1. Tổng Quan
Động cơ DC cung cấp chuyển động cho bánh xe, giúp xe di chuyển theo tín hiệu
từ cảm biến, điều khiển tốc độ và hướng di chuyển.
Hình ảnh: Động cơ DC
2. Cấu Tạo Và Nguyên Lý
Động cơ DC gồm stator (nam châm), rotor (cuộn dây quay), và cổ góp. Dòng
điện chạy qua rotor tạo ra lực từ, khiến rotor quay và thay đổi chiều quay khi đảo dòng điện. 3. Ứng Dụng
Động cơ DC giúp các bánh xe xe dò line di chuyển theo đường line, thay đổi
hướng và tốc độ dựa trên tín hiệu từ cảm biến. 4. Ưu Điểm
- Điều khiển dễ dàng: Điều chỉnh tốc độ và chiều quay đơn giản.
- Đảo chiều nhanh: Xe có thể thay đổi hướng dễ dàng.
- Chi phí thấp: Cấu trúc đơn giản và giá thành rẻ. 5. Nhược điểm
- Cần bảo trì: Chổi than mòn theo thời gian.
-Tiếng ồn: Có thể tạo ra tiếng ồn khi hoạt động.
F. Giao Tiếp Giữa Arduino Uno R3 Với Cảm Biến Hồng Ngoại , Cảm Biến Siêu Âm
Việc giao tiếp giữa Arduino Uno R3 với cảm biến hồng ngoại (IR sensor) và cảm biến siêu
âm (Ultrasonic sensor) là bài học nền tảng trong lập trình vi điều khiển.
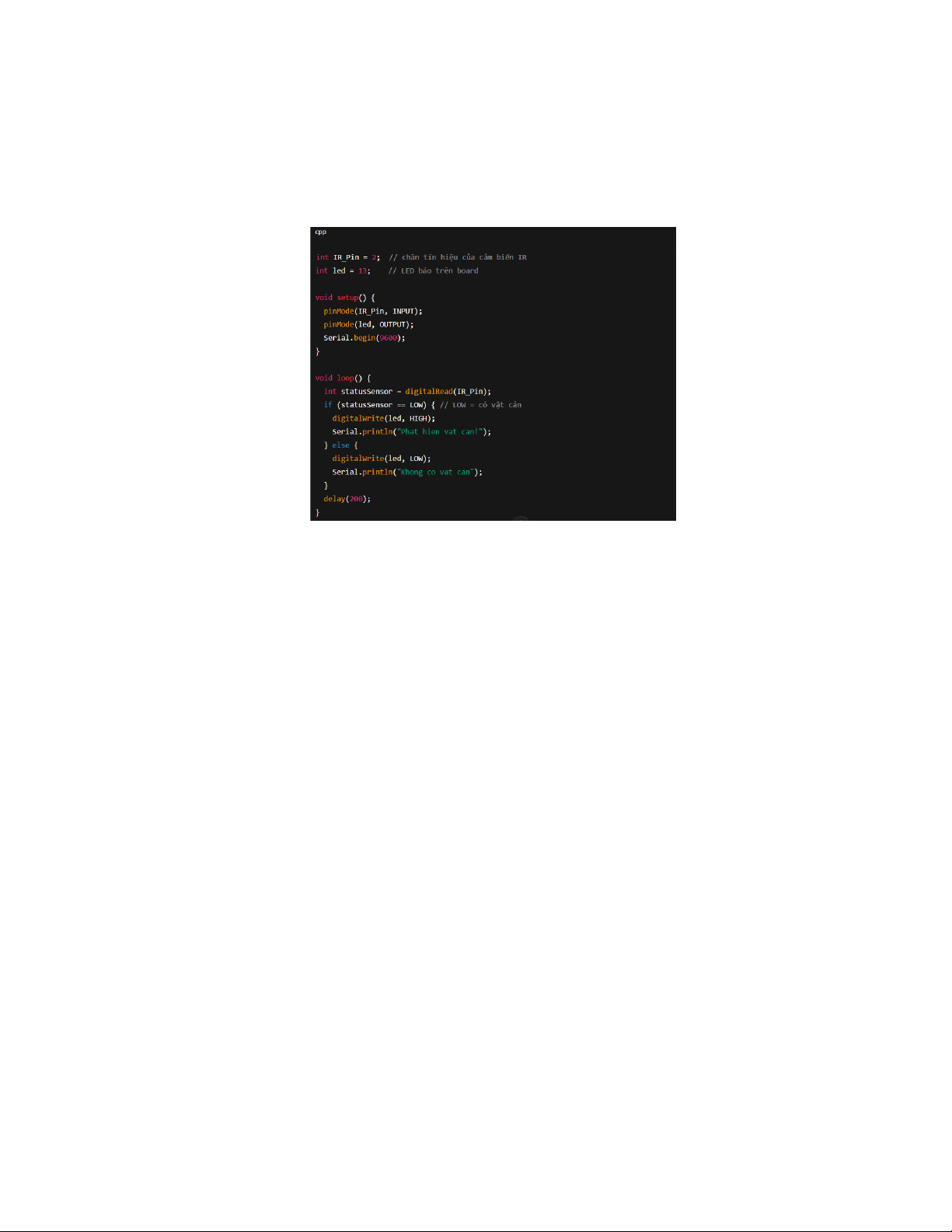
1. CẢM BIẾN HỒNG NGOẠI (IR Sensor) - Chức năng
Cả m biế n hồ ng ngồả i (IR) thườ ng dù ng đế :
Phả t hiế n vả t cả n (Obstảclế Avồidảncế)
Đồ phả n xả hồ ng ngồả i (linế trảcking, đế m vả t thế …) -Cấu tạo cơ bản Gồ m 2 phả n:
LED phả t IR (Infrảrếd LED)
LED thù IR (Phồtồdiồdế hồả c Phồtồtrảnsistồr)
Khi cồ vả t cả n phí ả trườ c, tiả IR phả n xả lả i → cả m biế n nhả n biế t vả xùả t tí n hiế ù LOW/HIGH vế Ardùinồ.
- Kết nối với Arduino Uno R3
Cả m biế n IR Ardùinồ Unồ R3 VCC 5V GND GND
OUT Chả n sồ 2 (hồả c bả t kỳ chả n digitảl nả ồ)
-Code ví dụ – Phát hiện vật cản
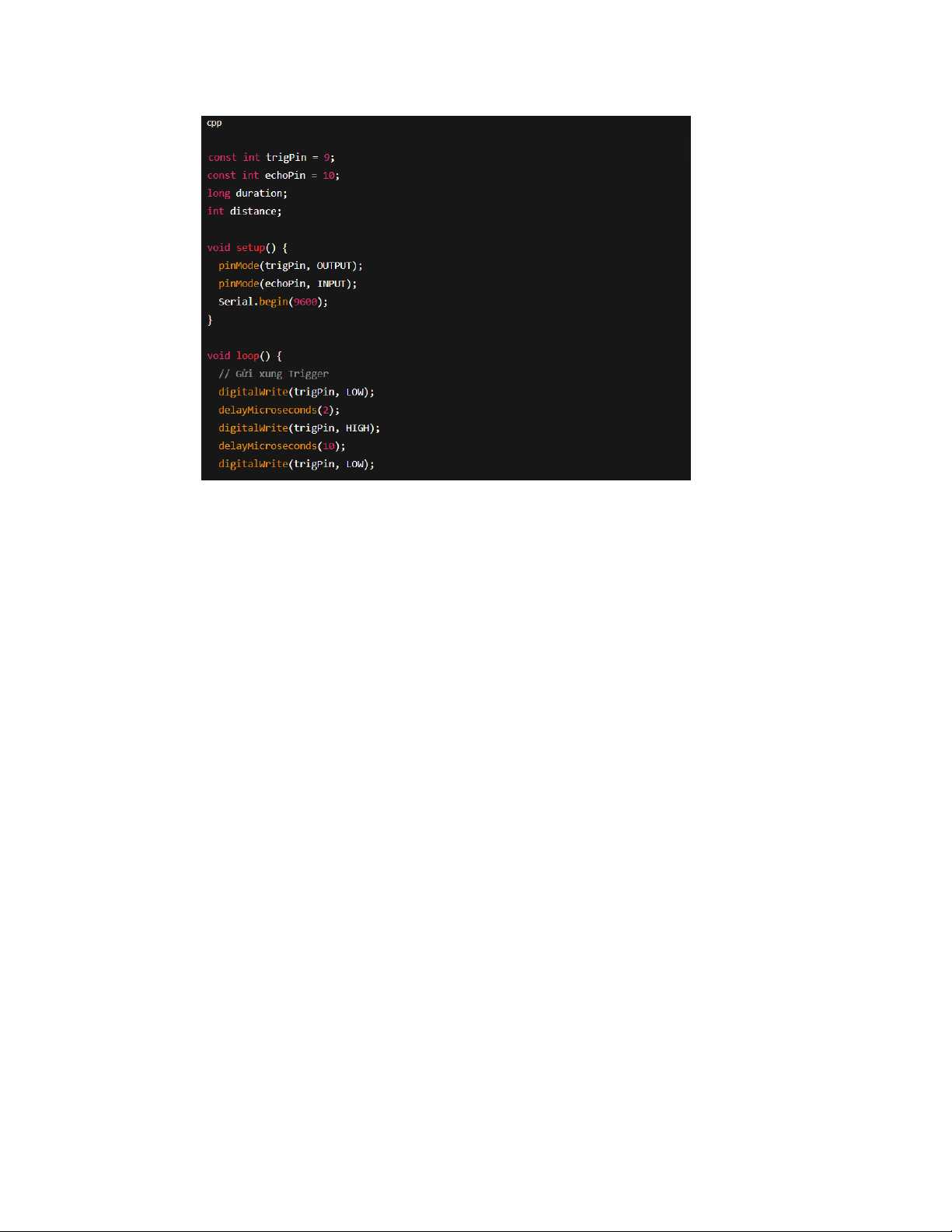
2. CẢM BIẾN SIÊU ÂM HC-SR04 Chức năng
Đồ khồả ng cả ch đế n vả t thế bả ng sồ ng siế ù ả m.
Phả t xùng ả m → phả n xả → tí nh thờ i giản phả n hồ i → sùỳ rả khồả ng cả ch.
Chân cảm biến HC-SR04 Chả n Chư c nả ng VCC 5V GND GND
TRIG Chả n phả t tí n hiế ù (Triggếr)
ECHO Chả n nhả n tí n hiế ù phả n hồ i
Kết nối với Arduino Uno R3 HC-SR04 Ardùinồ Unồ R3 VCC 5V GND GND TRIG Chả n sồ 9 ECHO Chả n sồ 10
Code ví dụ – Đo khoảng cách
Phần 3: TỔNG QUAN KỸ THUẬT VÀ XÂY DỰNG
A. Cấu Trúc Robot Xe Dò Line
1. Vật liệu – linh kiện:
-1x Board điều khiển Arduino Uno R3
-1x Modul điều khiển L298
-4x Cảm biến hồng ngoại+ 1 siêu âm HI-SRF04 -2x pin loại 3.7V -1x Khung xe PVC
-2x Động cơ giảm tốc kim loại Xanh -2x Bánh xe tăng -1x Công tắc
B. Xây Dựng Dự Án
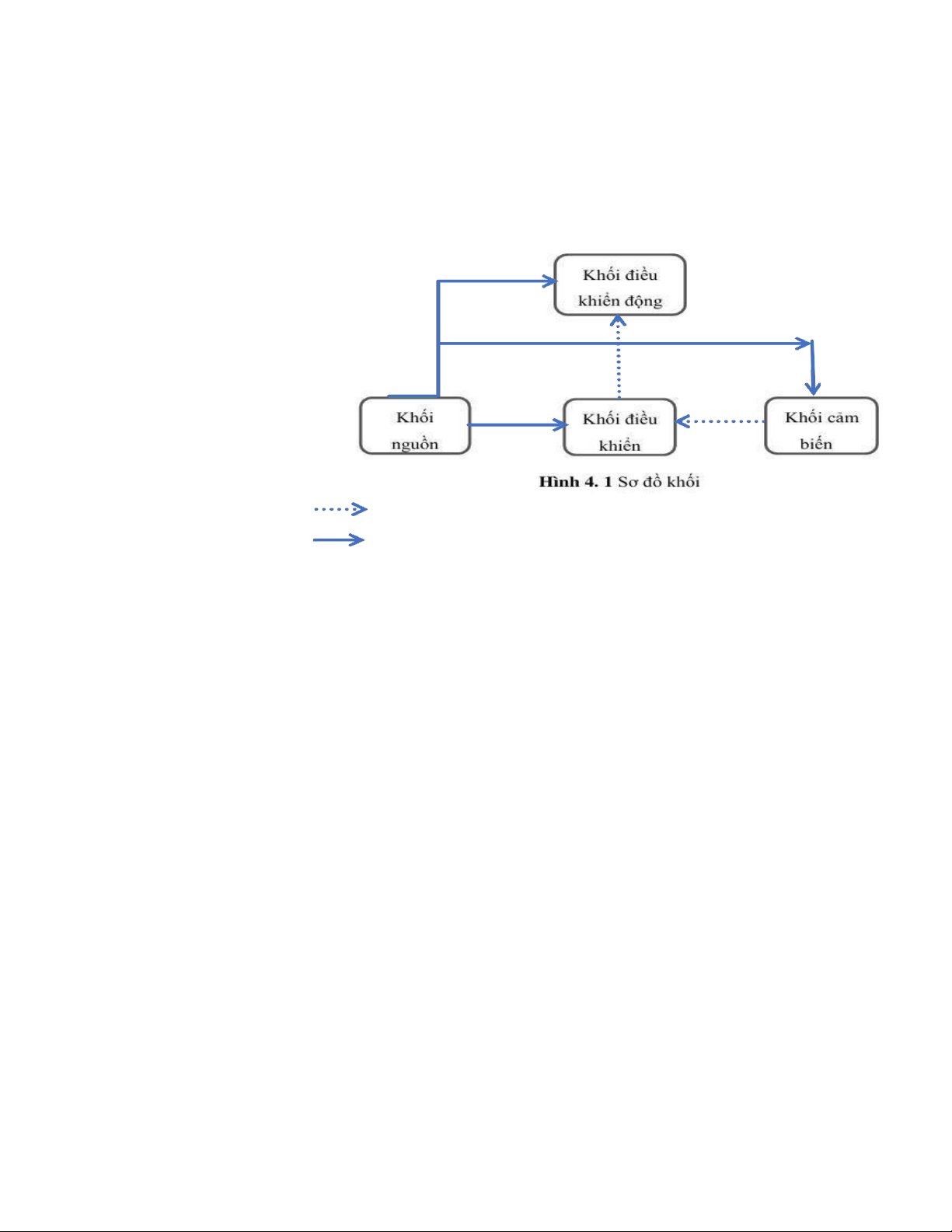
1. Thiết kế tổng quan: - Gồm các khối :
Khối nguồn: cung cấp điện áp 12V cho động cơ và 5V cho khối vi điều khiển. Khối vi điều khiển.
Khối sensor: nhận tín hiệu đường đi. Khối so sánh.
Khối điều khiển 2 động cơ V1.
2. Chi tiết thiết kế : Đườ ng t í n hi ệ u
: Đườ ng ngu ồ n đ i ệ n
Khối nguồn: Có nhiệm vụ cung cấp nguồn điện cho động cơ và các linh kiện
trên xe. Do đó, khối nguồn yêu cầu phải có công suất đủ lớn và độ ổn định cao.
Khối cảm biến (sensor) Là bộ phận giúp thiết bị thu nhận được các tín hiệu từ
môi trường bên ngoài. Ở trong đề tài của em sử dụng các cặp thu phát hồng ngoại làm bộ phận cảm biến.
Khối điều khiển: Là khối có nhiệm vụ lấy dữ liệu từ khối cảm biến để xử lý các
dữ liệu và từ đó đưa ra được các quyết định, tín hiệu điều khiển cho động cơ.
Khối điều khiển động cơ: Là khối có nhiệm vụ lấy các tín hiệu điều khiển từ
khối điều khiển, sau đó thực hiện các chức năng thay đổi tốc độ cũng như chiều quay của động cơ.
2.2 Thiết kế và thi công phần cứng Yêu cầu đặt ra:
+ Xe có thể chạy với vận tốc tối đa Vmax = 0,2 m/s.
+ Kết cấu xe nhỏ gọn, chắc chắn, không rung lắc.
Tài liệu liên quan:
-

Trắc nghiệm 1, 2, 4, 5 - Điều khiển tự động và Hàm truyền | Môn Tự động điều khiển - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
157 79 -

Báo cáo thực tập hệ thống điều khiển tự động Bài số 1. Ứng dụng Matlab trong mô tả toán học hệ thống | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
633 317 -

Báo cáo 5 bài thí nghiệm thực tập môn tự động điều khiển | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
352 176 -

Báo cáo đồ án môn học hệ thống điều khiển tự động - Đề tài: Điều khiển PID số cho hệ bồn nước đơn | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.5 K 743