Cơ sở lí thuyết bướm ga điện tử | Tài liệu Môn Công nghệ Kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1. Cấu tạo: Hệ thống ECTS bao gồm: vị trí bàn đạp ga, ECU động cơ và cổ họng gió + ECU động cơ điều khiển độ lớn và hướng của dòng điện chạy đến môtơ điều khiển bướm ga, làm quay hay giữ môtơ, và mở và đóng bướm ga qua một cụm bánh răng giảm tốc. + Vị trí bàn đạp ga: Góc mở bướm ga thực tế được phát hiện bằng một cảm biến vị trí bàn đạp ga, và thông số đó được phản hồi về cho ECU động cơ. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:







Preview text:
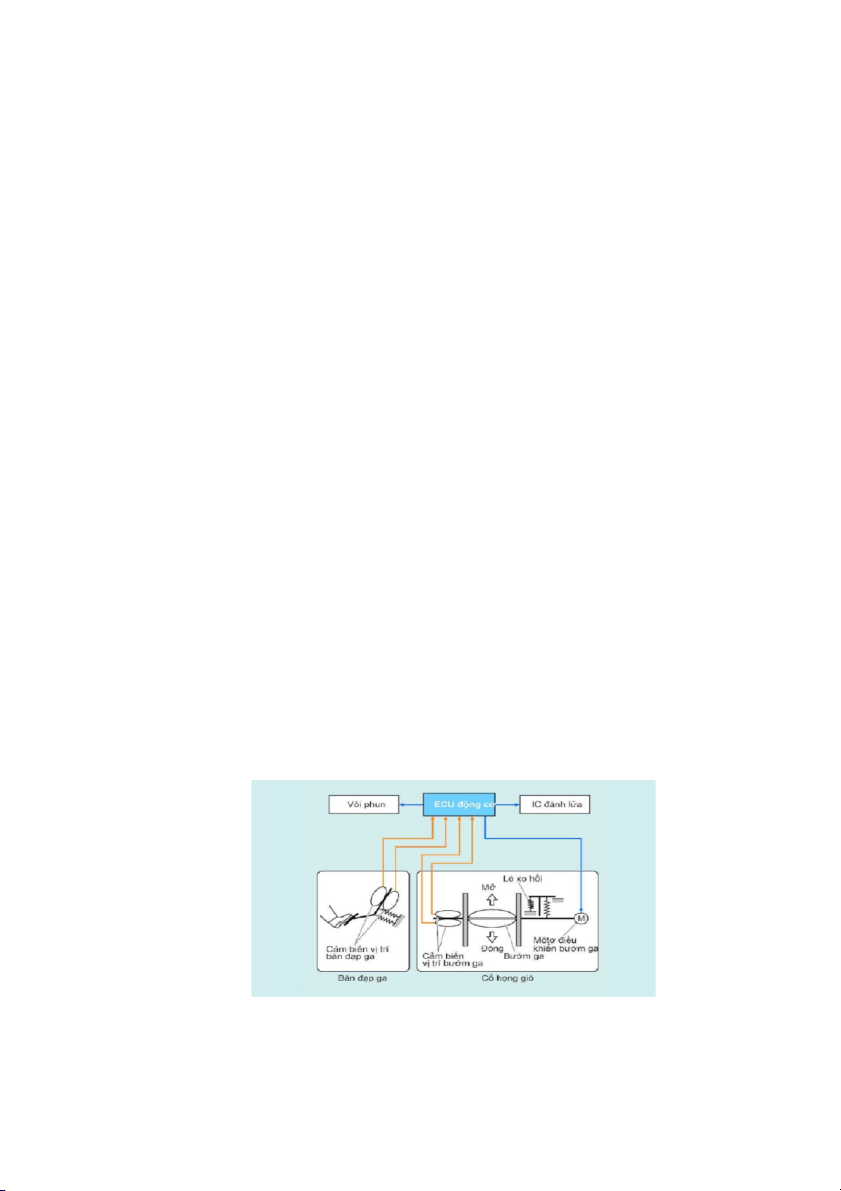
Cơ sở lí thuyết I.BƯỚM GA ĐIỆN TỬ 1. Cấu tạo
Hệ thống ECTS bao gồm: vị trí bàn đạp ga, ECU động cơ và cổ họng gió
+ ECU động cơ điều khiển độ lớn và hướng của dòng điện chạy đến môtơ điều
khiển bướm ga, làm quay hay giữ môtơ, và mở và đóng bướm ga qua một cụm bánh răng giảm tốc.
+ Vị trí bàn đạp ga: Góc mở bướm ga thực tế được phát hiện bằng một cảm biến vị
trí bàn đạp ga, và thông số đó được phản hồi về cho ECU động cơ. + Cổ họng gió: Bướm ga Motor
Hệ bánh răng giảm tốc
Cảm biến vị trí bướm ga Lò xo hồi
Sơ đồ cấu tạo và mạch điện của bướm ga Pin Func Pin Func 1 5V 4 TPS1 2 TPS2 5 GND 3 Coil - 6 Coil + 2. Chắc năng Bướm ga:
Nhận lệnh từ tài xế và giữ vai trò kiểm soát lưu lượng không khí đi vào buồng
đốt, giúp cho motor điều chỉnh góc mở bướm ga 1 góc phù hợp nhất. Motor:
Điều khiển độ đóng mở của bướm ga. Ứng dụng động cơ điện 1 chiều DC có độ
nhạy tốt và tiêu thụ năng lượng ít
Hệ bánh răng giảm tốc:
Được gắn với trục của motor dùng để giảm tốc độ quay của bướm ga. Khi motor
quay thì trục của motor sẽ thông qua các bánh răng để điều chỉnh đóng mở bướm ga Lò xo hồi:
Trả bướm ga về vị trí cố định. Cảm biến:
Sử dụng trong bướm ga hiện nay là cảm biến Hall.
3. Nguyên lí hoạt động
Khi đạp chân ga, cảm biến vị trí bàn đạp ga sẽ gửi tín hiệu (điện áp) về bộ xử
lý, bộ xử lý nhận tín hiệu này và kết hợp so sánh với các tín hiệu khác ( tín hiệu
máy điều hoà, tín hiệu sang số, tín hiệu điều khiển tốc độ cầm chừng, tín hiệu điều
khiển lực kéo..) sau đó xuất tín hiệu điều khiển bộ chấp hành ( một motor DC).Tín
hiệu hồi tiếp về bộ xử lí nhờ vào cảm biến vị trí cánh bướm ga giúp xác định chính
xác vị trí của bướm ga.ETCS-i điều khiển góc mở của bướm ga đến giá trị tối ưu
nhất tùy theo mức độ nhấn của bàn đạp ga.
Khi dòng điện không chạy qua môtơ, lò xo hồi sẽ mở bướm ga đến một vị trí cố
định (khoảng 7 độ). Tuy nhiên, trong chế độ không tải bướm ga được đóng lại nhỏ
hơn so với vị trí cố định. Khi ECU động cơ phát hiện thấy có trục trặc, nó bật đèn
báo hư hỏng trên đồng hồ taplo đồng thời cắt nguồn đến mô tơ, nhưng do bướm ga
được giữ ở góc mở khoảng 7 độ nên xe vẫn có thể chạy đến nơi an toàn.
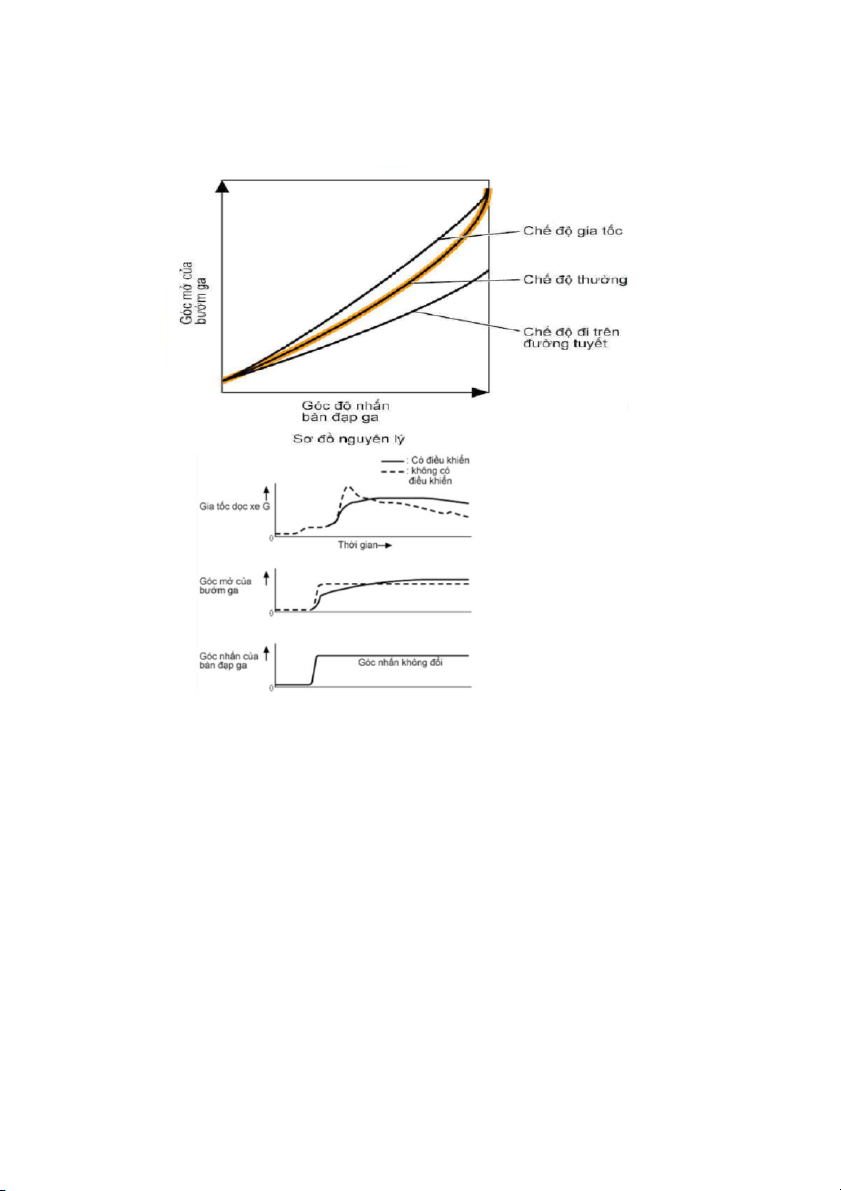
3.1. Điều khiển ở chế độ bình thường, chế độ công suất cao và chế độ đi
đường tuyết trơn trượt:
Về cơ bản, động cơ sử dụng chế độ bình thường, nhưng có thể dùng công tắc
điều khiển để chuyển sang chế độ công suất cao hay đi đường tuyết.
Điều khiển chế độ thường: Đây là chế độ điều khiển cơ bản để duy trì sự
cân bằng giữa tính dễ vận hành và chuyển động êm
Điều khiển chế độ công suất cao: Ở chế độ này, bướm ga mở lớn hơn so
với chế độ bình thường. Do đó, chế độ này mang lại cảm giác động cơ
đáp ứng nhanh với thao tác đạp ga và xe vận hành mạnh mẽ hơn so với
chế độ thường. Chế độ này chỉ có ở một số kiểu xe.
Điều khiển chế độ đường tuyết / trơn trượt: Chế độ điều khiển này giữ
cho góc mở bướm ga nhỏ hơn so với chế độ bình thường để tránh trượt
khi lái xe trên đường trơn trượt.
3.2.Điều khiển momen truyền lực chủ động
Chế độ điều khiển này làm cho góc mở bướm ga nhỏ hơn hay lớn hơn so với
góc đạp của bàn đạp ga để duy trì tính tăng tốc êm.
Hình trên cho thấy khi bàn đạp ga được giữ ở một vị trí đạp nhất định. Đối với
những kiểu xe không có hệ thống điều khiển momen truyền lực chủ động, bướm ga
được mở ra gần như đồng bộ với chuyển động của bàn đạp ga, như vậy trong một
khoảng thời gian ngắn, tạo ra gia tốc dọc xe G tăng đột ngột và sau đó giảm dần.
3.3.Các chế độ điều khiển
Điều khiển tốc độ không tải: Chức năng này điều khiển bướm ga ở phía
đóng để duy trì tốc độ không tải lý tưởng.
Điều khiển giảm va đập khi chuyển số: Chức năng điều khiển này giảm góc
mở của bướm ga và giảm momen động cơ đồng thời với điều khiển ECT khi
hộp số tự động chuyển số để làm giảm va đập khi chuyển số.
Điều khiển bướm ga TRAC: Nếu bánh xe chủ động bị trượt quá nhiều, như
là một phần của hệ thống TRAC, tín hiệu yêu cầu từ ECU điều khiển trượt sẽ
đóng bướm ga để giảm công suất, tăng tính ổn định của xe và đảm bảo lực dẫn động.
Điều khiển hỗ trợ VSC: Chức năng này điều khiển góc mở bướm ga bằng
điều khiển kết hợp với ECU điều khiển trượt để tận dụng tối đa hiệu quả điều
khiển của hệ thống VSC.
Điều khiển chạy tự động: Trong điều khiển chạy tự động thông thường, ECU
điều khiển chạy tự động mở và đóng bướm ga qua bộ chấp hành ECU điều
khiển chạy tự động và dây cáp. Nhưng với hệ thống ETCS-i, ECU động cơ bao
gồm ECU điều khiển chạy tự động sẽ trực tiếp điều khiển góc mở bướm ga qua
mô tơ điều khiển bướm ga để thực hiện thao tác điều khiển chạy tự động.
3.4.Chức năng dự phòng
Nếu ECU động cơ phát hiện thấy có trục trặc trong hệ thống ETCS-i, nó bật
đèn báo hư hỏng trên đồng hồ taplo để báo cho lái xe.
Cảm biến vị trí bàn đạp ga có mạch cảm biến cho 2 hệ thống, chính và phụ.
Nếu hư hỏng xảy ra trong một mạch cảm biến, và ECU phát hiện thấy có sự chênh
lệch điện áp không bình thường trong tín hiệu giữa 2 mạch cảm biến, ECU động cơ
sẽ chuyển sang chế độ hoạt động hạn chế.
Trong chế độ hoạt động hạn chế, mạch còn lại được sử dụng để tính toán góc
mở bướm ga hạn chế hơn so với bình thường. Ngoài ta, nếu có vẻ như hư hỏng xảy
ra trong cả hai mạch, ECU động cơ sẽ đặt bướm ga ở trạng thái không tải. Lúc này
xe chỉ có thể chạy ở trong phạm vi không tải.
Cảm biến vị trí bướm ga cũng có 2 mạch cảm biến, chính và phụ. Nếu hư
hỏng xảy ra ở trong mạch cảm biến và ECU động cơ phát hiện thấy điện áp không
bình thường giữa 2 mạch cảm biến, ECU động cơ sẽ cắt dòng điện đến motor điều
khiển bướm ga và sau đó chuyển sang chế độ hoạt động hạn chế.
Lúc này bướm ga được mở ở chế độ hoạt động hạn chế. Lúc này bướm ga
được mở ở góc cố định bằng lò xo hồi, và lượng phun nhiên liệu và thời điểm đánh
lửa được điều khiển bằng tín hiệu bàn đạp ga. Công suất của động cơ sẽ bị hạn chế
đi nhiều nhưng xe vẫn có thể chạy được.
Khi ECU động cơ phát hiện thấy có hư hỏng hệ thống motor điều khiển
bướm ga, khi đó nó sẽ điều khiển giống như khi có hư hỏng về cảm biến vị trí bướm ga.
Ưu điểm của bướm ga điện tử:
Hệ thống điều khiển bướm ga điện tử hay "Ride by Wire" (RbW) là công
nghệ quản lý bướm ga hiện đại nhất, nhờ cảm biến điện tử thay thế cho
dây ga truyền thống, giúp tay ga nhẹ hơn và tối ưu hóa độ mở bướm ga.
Khi siết ga tăng tốc, ECU sẽ phân tích một cách chính xác các yếu tố:
vòng tua máy, vị trí số, lọc gió và áp lực xả... Sau đó hệ thống sẽ điều
khiển việc phun nhiên liệu, nâng cao hiệu suất động cơ, tiết kiệm tối đa nhiên liệu.
Giúp xe chuyển động ổn định, đáp ứng nhanh hơn trên các điều kiện
đường xá khác nhau, thời tiết khác nhau, điều khiển bướm ga luôn đúng
ở các chế độ làm việc.
Tính kinh tế trong việc sử dụng.
Nhược điểm của bướm ga điện tử:
Vì không có bất kì sự liên kết vật lí nào giữa việc kiểm soát ga và bướm
ga nên làm cho một số người dùng không có trải nghiệm về độ chuyển
động hay phản hồi từ hệ thống ga.
Có độ trễ nhất định cũng như rất dễ hư hỏng tại những nơi có thời tiết
nóng ẩm như Việt Nam, nên cần chú ý thay thế và bảo dưỡng định kì. II. Ardruino 1.Ardruino là gì ?
Arduino là nền tảng mã nguồn mở giúp con người xây dựng các ứng dụng điện tử
có khả năng liên kết, tương tác với nhau tốt hơn.Arduino có thể xem như một chiếc
máy tính thu nhỏ giúp người dùng lập trình, thực hiện các dự án điện tử không cần
tới công cụ chuyên biệt phục cho quá trình nạp code.
Arduino có khả năng đọc các thiết bị cảm biến, điều khiển động cơ nên nó thường
được dùng để làm bộ xử lý trung tâm của rất nhiều loại robot.
Chọn Arduino Uno R3 để xử lý và lập trình bướm ga.
2.Ardruino điều khiển bướm ga như thế nào?
Arduino nhận tín hiệu từ biến trở và truyền dữ liệu ra để điều khiển động cơ của
bướm ga thông qua transistor.
Chọn transistor Tip 122 để kết nối giữa động cơ của bướm ga và arduino,vì dùng
transistor công suất ngược nên chân B dùng để nhận tín hiệu, C là (+), E là (-).
Arduino điều khiển động cơ của bướm ga điện tử thông qua transistor vì transistor
có thể chịu được dòng cao, nếu không qua transistor thì arduino không thể điều
khiển motor và mạch sẽ bị cháy.
Khi bướm ga mở, arduino còn được kết nối với bướm ga qua 1 chân tín hiệu của
bướm ga để đọc độ mở bướm ga. III. Cảm biến HALL 1.Cấu tạo
- Gồm 3 chân, chân đầu tiên là chân nguồn, sử dụng để cấp nguồn cho cảm biến,
chân thứ hai là chân nối đất, sử dụng để cấp mass cho cảm biến, còn chân thứ ba là
chân đầu ra digital được kết nối giao tiếp với bộ điều khiển như vi điều khiển hoặc Arduino,…
- Là loại cảm biến dùng để phát hiện từ tính của nam châm, khi đưa nam châm lại
gần thì cảm biến sẽ phát một tín hiệu và từ đó có thể thực hiện một hành động đã lập trình sẵn.
- Có hai loại cảm biến Hall: Một loại có đầu ra là tín hiệu Analog và một loại có
đầu ra Digital bao gồm ổn áp, cảm biến Hall và bộ khuếch đại.
2.Nguyên lí hoạt động
- Cảm biến Hall hoạt động dựa trên quy tắc của nguyên lý Hall: Hiệu ứng Hall là
một hiệu ứng vật lý được thực hiện khi áp dụng một từ trường vuông góc lên một
thanh Hall đang có dòng điện chạy qua:
- Khi dòng điện chạy qua vật liệu dẫn điện, các electron di chuyển theo một đường thẳng.
- Đặt vật liệu trong từ trường và cho dòng điện chạy qua. Một lực tác dụng lên
chúng làm cho chúng lệch khỏi đường thẳng ban đầu. Đó là lực Lorentz.
- Cảm biến vị trí bướm ga loại phần tử Hall gồm có các mạch IC Hall làm bằng các
phần tử Hall và các nam châm quay quanh chúng. Các nam châm được lắp ở trên
trục bướm ga và quay cùng với bướm ga.
- Khi bướm ga mở, các nam châm bắt đầu quay và thay đổi vị trí cho nhau. Ngay
lúc đó, IC Hall phát hiện sự thay đổi từ thông từ việc thay đổi vị trí, sau đó tạo ra
điện áp từ các cực tùy theo mức thay đổi của nam châm.
- Tín hiệu được truyền đến ECU động cơ dưới dạng tín hiệu van tiết lưu.
3.Ứng dụng làm cảm biến bướm ga
Sử dụng phương pháp không tiếp điểm, có cấu tạo đơn giản nên rất khó bị
hỏng, giúp phát hiện chính xác độ mở bướm ga.
+ Ưu điểm của cảm biến hall:
Nhỏ gọn, cấu tạo đơn giản
Có thể lắp đặt ở bất kì bộ phận nào trên ô tô
Không có yếu tố cơ học nào, để các tiếp điểm không bị cháy
Xung điện tử phản ứng nhạy trong từ trường
+ Nhược điểm của cảm biến hall:
Có thể bị gây nhiễu Đắt tiền
Ảnh hưởng hiệu suất bởi nguồn, mạch điện.
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445