Cơ sở lý thuyết hệ thống Hybrid hỗn hợp | Tài liệu môn Công nghệ kĩ thuật Ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Với khả năng tiết kiệm nhiên liệu, Prius 2010 được cho là đã cải thiện khả năng tiết kiệm nhiên liệu so với Prius thế hệ thứ hai, theo ước tính khoảng 51 dặm / gallon (MPG) đối với điều kiện lái xe trong thành phố và 48 MPG đối với điều kiện lái xe trên đường cao tốc. Theo thông số kỹ thuật đã công bố, hệ dẫn động bánh trước được cung cấp bởi động cơ đốt trong chu trình Atkinson 1,8 Lít 4 xi lanh 98 mã lực (73 kW) và với sự trợ giúp của kim loại niken 36 mã lực (27 kW) gói pin hydride, hệ thống có công suất thực là 134 mã lực (100 kW). Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:












Preview text:
Contents
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT HỆ THỐNG HYBRID HỖN HỢP.........2
2.1 Thông số và cấu tạo của hệ thống hybrid trên xe Toyota Prius:.......2
2.1.1 Thông số kết cấu:..............................................................................2
2.2 Nguyên lý hoạt động của hệ thống hybrid trên xe toyota prius:..............6
2.3 Các bộ phận chính trên hệ thống hybrid trên toyota prius:....................11
2.3.1 Động cơ của xe toyota prius:...........................................................11
2.3.2 MG1 và MG2 :................................................................................19
2.3.3 Bộ phân chia công suất PSD (Hộp số của xe hybrid).....................26
2.3.4 Bộ điều khiển công suất (PCU).......................................................31
2.3.5 Cụm Bộ Chuyển Đổi (inverter):......................................................35
2.3.6 Nguồn cao áp:.................................................................................38
2.4 PHƯƠNG PHÁP ĐIỀU KHIỂN...........................................................42
2.4.1 Các chế độ hoạt động......................................................................43
2.4.2 Chiến thuật điều khiển....................................................................49
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT HỆ THỐNG HYBRID HỖN HỢP
2.1 Thông số và cấu tạo của hệ thống hybrid trên xe Toyota Prius: 2.1.1 Thông số kết cấu:
Hình 2.1 Toyota prius hybrid 2010 (Corporation, 2010) Thông số kỹ thuật:
+ Động cơ xăng: 71 kW / 72 kW, Động cơ hợp kim nhôm 1,8 lít + Động cơ điện:
-Mặt trước: 60 kW (80 HP), Động cơ nam châm vĩnh cửu
+ Hộp số: hộp số tự động
+ Pin HV: Pin NiMH kín 201,6 Volt + Pin Li-ion kín 207,2 Volt
+ Trọng lượng: 1.365 - 1.460 kg / 3010, - 3.219 lbs
+ Thùng nhiên liệu: 43 lít / 11,4 gals
+ Chất liệu khung: Thép Unibody
+ Vật liệu thân vỏ: Thép tấm ngoại trừ tấm nhôm nắp capo và cửa sau
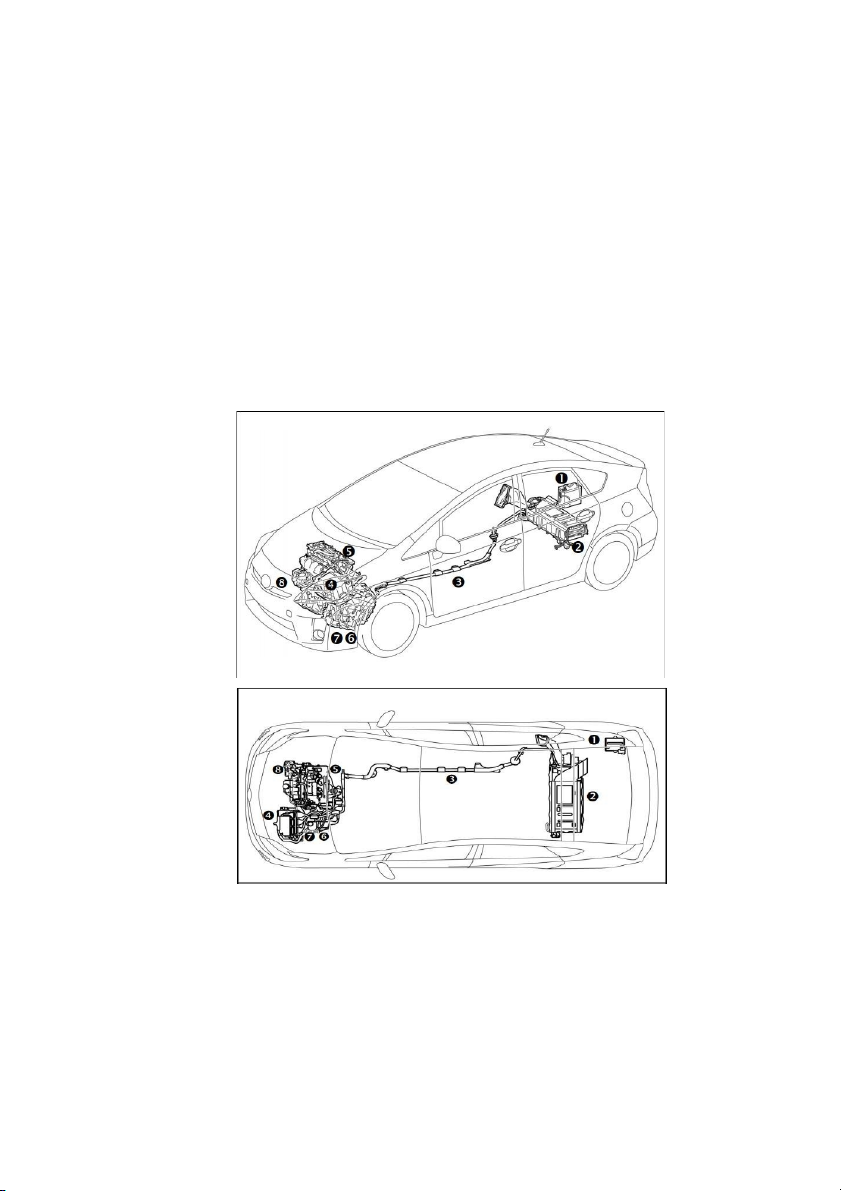
2.1.2 Cấu tạo hệ thống hybrid trên toyota prius:
Hình 2.2 Vị trí và cách bố chí của hệ thống hybrid trên toyota prius Component Description 1 ắc quy phụ 12 Volt (1)
Cung cấp điện cho các bộ phận điện như
hệ thống chiếu sáng, hệ thống điều khiển,..... 2 Bộ pin xe hybrid (HV)
• Cung cấp năng lượng điện cho MG1, (2)
MG2 và MGR * 1 phù hợp với điều kiện lái của xe.
• Được sạc lại bằng MG1 và MG2 phù
hợp với SOC và điều kiện lái xe của xe. 3 Cáp nguồn (3)
Kết nối pin HV, biến tần với cụm bộ
chuyển đổi, cụm transaxle xe hybrid, bộ
truyền động phía sau (động cơ kéo phía
sau với cụm transaxle) * 1 và máy nén với cụm động cơ 4 Biến tần / Bộ chuyển
Giảm điện áp danh định của pin HV là
Bộ chuyển đổi DC-DC DC 201,6 V * 1 / DC 207,2 V * 2 xuống đổi (4) cho ắc quy
khoảng DC 14 V để cung cấp điện cho
phụ 12 Volt các bộ phận điện, cũng như để sạc lại ắc quy phụ. -Động cơ
Điều khiển bộ biến tần và bộ chuyển đổi -Máy phát
tăng áp phù hợp với các tín hiệu nhận điện
được từ ECU điều khiển xe hybrid, do -ECU
đó vận hành MG1 và MG2 như một
máy phát điện hoặc động cơ. Bộ chuyển
Tăng điện áp danh định của pin HV là đổi điện áp
DC 201,6 V * 1 / DC 207,2 V * 2 lên tăng
đến điện áp tối đa là DC 600 V và
ngược lại (giảm DC 600 V xuống DC 201,6 V * 1 / DC 207,2 V * 2). Biến tần
Chuyển đổi dòng điện một chiều từ bộ
chuyển đổi tăng cường thành dòng điện
xoay chiều cho MG1 và MG2, và ngược lại (từ AC sang DC). 5 Động cơ xăng (5)
Là một động cơ chu trình Atkinson có
tỷ lệ giãn nở cao, tương thích với hệ
thống hybrid, tạo ra lực truyền động cho
động cơ và năng lượng để phát điện. 6
Động cơ điện phía trước • MG2, được dẫn động bằng năng lượng (6)
điện từ MG1 và pin HV, tạo ra lực động
lực cho các bánh xe dẫn động.
• Trong quá trình phanh, hoặc khi không
nhấn chân ga, nó tạo ra điện cao áp để sạc lại ắc quy HV. 7 Máy phát điện (7)
MG1, được dẫn động bởi động cơ, tạo
ra điện cao áp để vận hành MG2 và sạc
pin HV. Ngoài ra, nó hoạt động như một
bộ khởi động để khởi động động cơ. 8
Máy nén A / C (có biến Được truyền động với tốc độ được tính tần) (8)
toán bởi cụm bộ khuếch đại điều hòa
không khí, nhận yêu cầu truyền động từ
ECU điều khiển xe hybrid và đưa vào,
nén và xả chất làm lạnh. 9 Thùng nhiên liệu và
Bình xăng cung cấp xăng qua đường Dòng nhiên liệu (9)
nhiên liệu tới động cơ. Đường nhiên liệu
được định tuyến dọc theo bên trái dưới khay sàn.
2.2 Nguyên lý hoạt động của hệ thống hybrid trên xe toyota prius:
Với khả năng tiết kiệm nhiên liệu, Prius 2010 được cho là đã cải thiện khả
năng tiết kiệm nhiên liệu so với Prius thế hệ thứ hai, theo ước tính khoảng 51 dặm
/ gallon (MPG) đối với điều kiện lái xe trong thành phố và 48 MPG đối với điều
kiện lái xe trên đường cao tốc. Theo thông số kỹ thuật đã công bố, hệ dẫn động
bánh trước được cung cấp bởi động cơ đốt trong chu trình Atkinson 1,8 Lít 4 xi-
lanh 98 mã lực (73 kW) và với sự trợ giúp của kim loại niken 36 mã lực (27 kW)
gói pin hydride, hệ thống có công suất thực là 134 mã lực (100 kW).
Toyota Prius 2010 được trang bị hệ thống Hybrid Synergy Drive bao gồm
ICE, động cơ điện và máy phát điện. Các hệ thống này được tích hợp với một
bánh răng hành tinh phân chia công suất cung cấp các dòng công suất khác nhau
cho các chế độ hoạt động khác nhau. Động cơ điện chính (MG2) hỗ trợ ICE cung
cấp năng lượng truyền động cơ học cho xe và cũng hoạt động như một máy phát
điện để sạc lại ắc quy trong quá trình phanh tái sinh. Một động cơ điện thứ cấp
(MG1) có chức năng như một máy phát điện để truyền năng lượng từ ICE để sạc
lại pin và cũng sử dụng ICE như một nguồn năng lượng để cung cấp cho MG2,
cuối cùng hỗ trợ việc đẩy xe. Đây thường được gọi là ECVT, vì các động cơ điện
và hành tinh phân chia công suất được sử dụng để thay đổi tỷ số truyền giữa ICE
và các bánh dẫn động mà không cần sử dụng ly hợp hoặc thiết bị thủy lực. Trong
khi các chức năng cơ bản của hệ thống hybrid Prius 2010 tương tự như những
mẫu xe tiền nhiệm của nó, nó gần giống với Camry hybrid 2007 về thiết kế cụ thể.
Chiếc xe này có thể sử dụng động cơ điện để cung cấp toàn bộ lực kéo
trong quá trình tăng tốc từ khi dừng lại. Chế độ hoạt động này có hoạt động tới
khi động cơ cần thiết vì bất kỳ lý do nào (nhiều mô-men xoắn hơn, trạng thái sạc
pin yếu, nhiệt độ pin cao, nhiệt độ động cơ thích hợp, v.v.). ECVT có ly hợp
chứa một bánh răng hành tinh cho phép hoạt động theo các trường hợp khác
nhau của dòng điện từ pin, ICE và động cơ đến trục đầu ra. Cấu hình bánh răng
hành tinh của ECVT tạo cơ hội vận hành ICE trong suốt dải tốc độ mô-men xoắn
hiệu quả hơn bằng cách kiểm soát thích hợp mô-men xoắn và tốc độ của MG1 và
MG2. Chứa trong PCU là các thiết bị điện tử quản lý dòng điện đến và đi từ pin,
máy phát điện và động cơ. Hệ thống sử dụng pin niken hiđrua kim loại (Ni-MH)
kín với các tế bào 1,2V mắc nối tiếp để tạo ra điện áp tương ứng là 201,6 V, 288
V và 245 V. Mặc dù điện áp và dung lượng pin 6,5 ampe giờ phù hợp với chiếc
Prius 2004, nhưng công suất định mức được công bố của bộ pin đã tăng từ 28 mã
lực (20,9 kW) lên 36 mã lực (26,8 kW). Đây có lẽ là một dấu hiệu cho thấy hệ
thống làm mát pin đã được cải tiến. MG2 thường được gọi là “động cơ điện
chính” và MG1 thường được gọi là “máy phát điện”. Cả MG1 và MG2 đều được
cấp nguồn bởi các bộ nghịch lưu ba pha riêng biệt chia sẻ cùng một liên kết dòng
điện một chiều (dc). Điện áp pin được tăng cường bởi bộ chuyển đổi dc-dc hai
chiều cung cấp điện áp cao. Cấu hình này tạo điều kiện thuận lợi cho việc sử
dụng nhiều chế độ dòng điện, trong đó ICE, MG1 và / hoặc MG2 có thể cung
cấp năng lượng cho bộ pin, bộ pin có thể cung cấp riêng cho MG1 / MG2 hoặc
ICE và bộ pin có thể cung cấp năng lượng đồng thời cho xe.
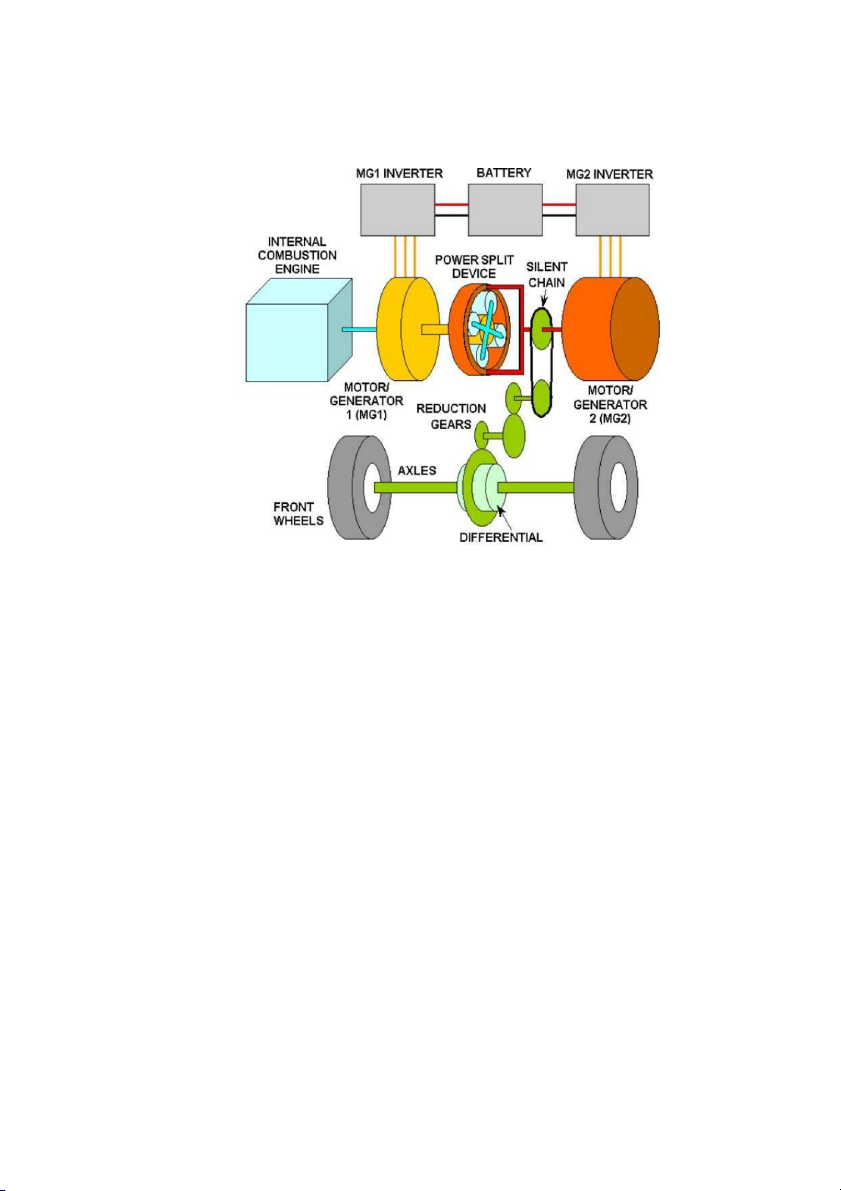
Hình 2.3 Sơ đồ nguyên lý hệ thống hybrid
Toyota Prius được chế tạo trong những năm gần đây được trang bị hệ
động lực có cấu trúc và nguyên lý hoạt động tương tự như các Toyota Prius thế
hệ trước nhưng các thành phần cơ bản như ICE, MG1, MG2 và BT cao áp được cải thiện về chất lượng hoặc điều chỉnh một số thông số tính năng.
Chiến lược điều khiển THS được thực hiện bằng bộ điều khiển điện tử
trung tâm trong suốt quá trình hoạt động của ô tô. Có thể phân biệt các chế độ
hoạt động đặc trưng sau đây:
(1) Chế độ điện: Chế độ điện bao gồm các chế độ như ô tô bắt đầu chuyển
động, chạy từ từ, xuống dốc trên đoạn đường có độ dốc nhỏ. Khi ở chế độ điện,
ICE không hoạt động, MG2 chạy bằng điện từ BT. Toyota Prius được trang bị ắc
qui cao áp có dung lượng vừa phải (6,5 Ah) nên chỉ cho phép hoạt động ở chế độ
điện trong một thời gian tương đối ngắn và một quãng đường vừa phải.
Hình 2.4 Chế độ điện (chế độ số 1 khởi động điện) (Corporation, 2010)
(2) Chế độ hành trình (còn gọi là chế độ chạy bình thường) là chế độ ô tô
chạy đường dài với tốc độ ổn định. Công suất của ICE được chia cho bánh xe
chủ động và máy phát điện MG1 với tỷ lệ sao cho ICE làm việc ở vùng có hiệu
suất tối ưu. MG2 chạy bằng điện từ máy phát. Nếu dung lượng của BT thấp, một
phần công suất của máy phát dùng để nạp điện cho BT;
Hình 2.5 Chế độ hành trình (chế độ số 2 chạy bình thường)
(3) Chế độ trợ lực (còn gọi là chế
độ gia tốc tối đa): khi người lái muốn
tang lên tốc độ tối đa (trên 100 dặm / giờ), công suất truyền động điện từ MG2
bổ sung cho động cơ. Pin HV cung cấp điện cho MG2. MG1 bị dẫn và quay với
tốc độ giảm dần nên nạp điện điện lại cho pin.
Hình 2.6 Chế độ trợ lực (chế độ số 3 gia tốc tối đa)
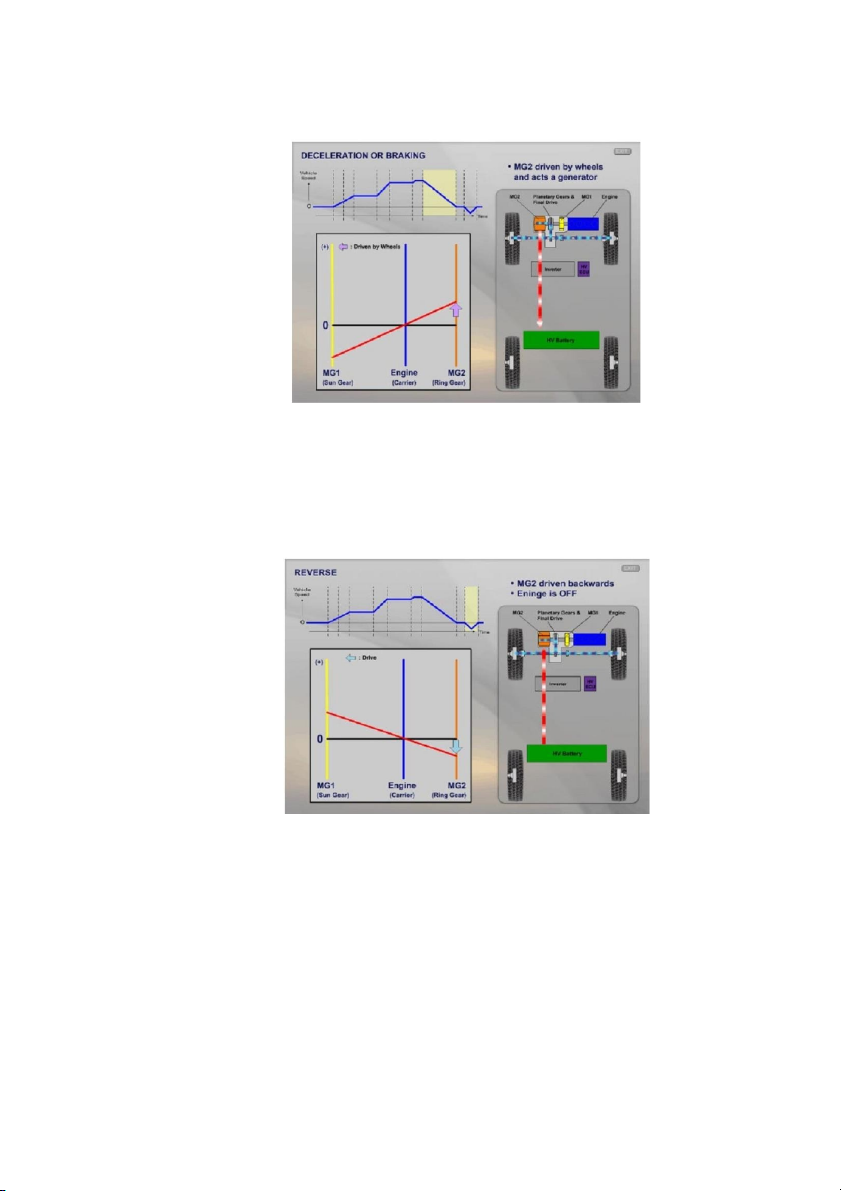
(4) Chế độ nạp BT (còn gọi là chế độ giảm tốc và phanh): BT được nạp
điện trong quá trình phanh hoặc xuống dốc bằng motor MG2 hoặc bằng motor
MG1 ở chế độ hành trình. Trên xe Toyota Prius, bộ điều khiển trung tâm đảm
bảo BT phải luôn được nạp đầy, tức là không thể nạp điện thủ công. Trong chế
độ này khi phanh hoặc xuống dốc thì motor 2 được kéo đi và tạo ra điện áp về pin.
Hình 2.7 Chế độ nạp (chế độ số 4)
(5) Chế độ chia công suất ngược: Ô tô chạy ở chế độ hành trình và BT
đầy điện. BT cung cấp điện cho cả MG2 để dẫn động bánh xe và cho cả MG1.
MG1 chạy sẽ làm ICE quay chậm hơn với mục đích giảm tiêu hao nhiên liệu
trong khi momen quay không đổi.
Hình 2.8 Chế độ chia công suất ngược
2.3 Các bộ phận chính trên hệ thống hybrid trên toyota prius:
2.3.1 Động cơ của xe toyota prius:
1NZ-FXE là một trong hai nguồn công suất của xe Prius. 1NZ-FXE là một
động cơ thẳng hàng 4 xy lanh 1.5l với hệ thống VVT-I (hệ thống điều khiển thời
điểm nạp thông minh) và hệ thống ETCS-I (hệ thống điều khiển bướm ga điện tử
thông minh). 1NZ-FXE bao gồm một số sự điều chỉnh giúp đặc tính cân đối, tính
kinh tế về nhiên liệu và khí thải được sạch hơn đối với xe hybrid.
Một điểm mới của động cơ 1NZ-FXE đó là thời điểm phối khí chu trình
Atkinson cho phép động cơ giảm khí thải nhờ vào sự thay đổi mối tương quan
giữa thì nén và thì giãn nỡ. Một đặc trưng khác được đưa vào trên các xe hybdrid
thế hệ ’04 về sau là hệ thống tích nhiệt cho nước làm mát. Nó thu hồi nước nóng
từ động cơ và chứa chúng trong một thùng cách nhiệt và giữ nhiệt nóng lên đến
ba ngày. Về sau, một bơm điện luân chuyển nước nóng xuyên qua động cơ để
giảm khí thải HC tại thời điểm động cơ còn lạnh (lúc khởi động).
Hình 2.9 Động cơ xăng 1NZ-FXE
Đặc điểm thông số kỹ thuật: Kiểu ’04 Prius ’03 Prius Loại động cơ 1NZ-FXE 1NZ-FXE
Số lượng xi lanh và cách 4-xi lanh, thẳng 4-xi lanh, thẳng hàng bố trí hàng 16 van DOHC, xích 16 van DOHC, xích dẫn Cơ cấu van dẫn động (với VVT- động (với VVT-i) i) Buồng đốt Kiểu vát nghiêng Kiểu vát nghiêng Đường ống nạp Dòng chéo Dòng chéo Hệ thống nhiên liệu SFI SFI
Thể tích công tác cm3(cu.in) 1497(91.3) 1497(91.3) Đường kính x hành trình 75.0 x 84.7 75.0 x 84.7 mm (in) (2.95 x 3.33) (2.95 x 3.33) Tỉ số nén 13. 0: 1 13. 0: 1
Công suất cực đại 57kW tại 5000 v/p 52kW tại 4500 v/p (SEA-NET) (76 HP tại 5000 v/p) (70 HP tại 4500 v/p) 111 N.m tại 4200 v/p
Mômen cực đại (SEA- 111 N.m tại 4200 v/p (82 ft.1bf tại 4200 NET) (82 ft.1bf tại 4200 v/p) v/p) Van Mở 18o -15o BTDC 18o -25o BTDC nạp đóng 72o --- 105o ABDC 72o --- 115o ABDC Thời Mở 34o BBDC 34o BBDC điểm Van đóng mở xả đóng 2o ATDC 2o ATDC van Thứ tự đánh lửa 1-3-4-2 1-3-4-2
Trị số ốc tan xác định theo phương pháp nghiên 91 hoặc cao hơn 91 hoặc cao hơn cứu RON Trị số ốc tan 87 hoặc cao hơn 87 hoặc cao hơn
API SJ, SL, EC hoặc API SH, SJ, EC Cấp dầu ILSAC hoặc ILSAC
Tuần hoàn khí thải ống pô SULEV SULEV
Tuần hoàn khí thải bay hơi AT-PZEV, ORVR LEV-II, ORVR
Bảng 2.1 Đặc điểm thông số của động cơ 1NZ-FXE
*VVT-I và chu trình Atkinson:
+ VVT-I cho phép hệ thống điều chỉnh thời điểm van nạp. 1NZ-FXE sử
dụng khả năng này để thay đổi giữa thời điểm mở van của van truyền thống với
van chu trình Atkinson, biến đổi dung tích có ích của động cơ. Trong một động
cơ chu trình Atkinson, van nạp được mở hợp lý tại thì nén. Trong khi mở van,
một vài xy lanh thể tích bị đẩy trở lại trong đường ống nạp. Điều này làm giảm
dung tích động cơ. Nhờ sử dụng hệ thống VVT-I để điều chỉnh liên tục thời điểm
van nạp mở giữa van chu trình Atkinson và van truyền thống, động cơ có thể đạt
hiệu suất nhiên liệu lớn nhất mỗi khi có thể trong khi vẫn cung cấp công suất lớn
nhất khi được yêu cầu. +Tính năng cao:
VVT-i được dùng để điều chỉnh một cách chính xác thời điểm van nạp
tương ứng với những điều kiện hoạt động, luôn luôn đạt được hiệu suất cao nhất.
Việc sử dụng buồng đốt vát nghiêng đảm bảo sự lan truyền ngọn lửa nhanh
chóng trong toàn bộ buồng đốt. Hiệu suất nhiệt cao, làm giảm cả kích thước và trọng lượng của
thân động cơ thông qua việc sử dụng khối xi lanh bằng hợp kim nhôm, và một
đường ống nạp tích hợp,... giúp cải thiện hiệu quả nhiên liệu.
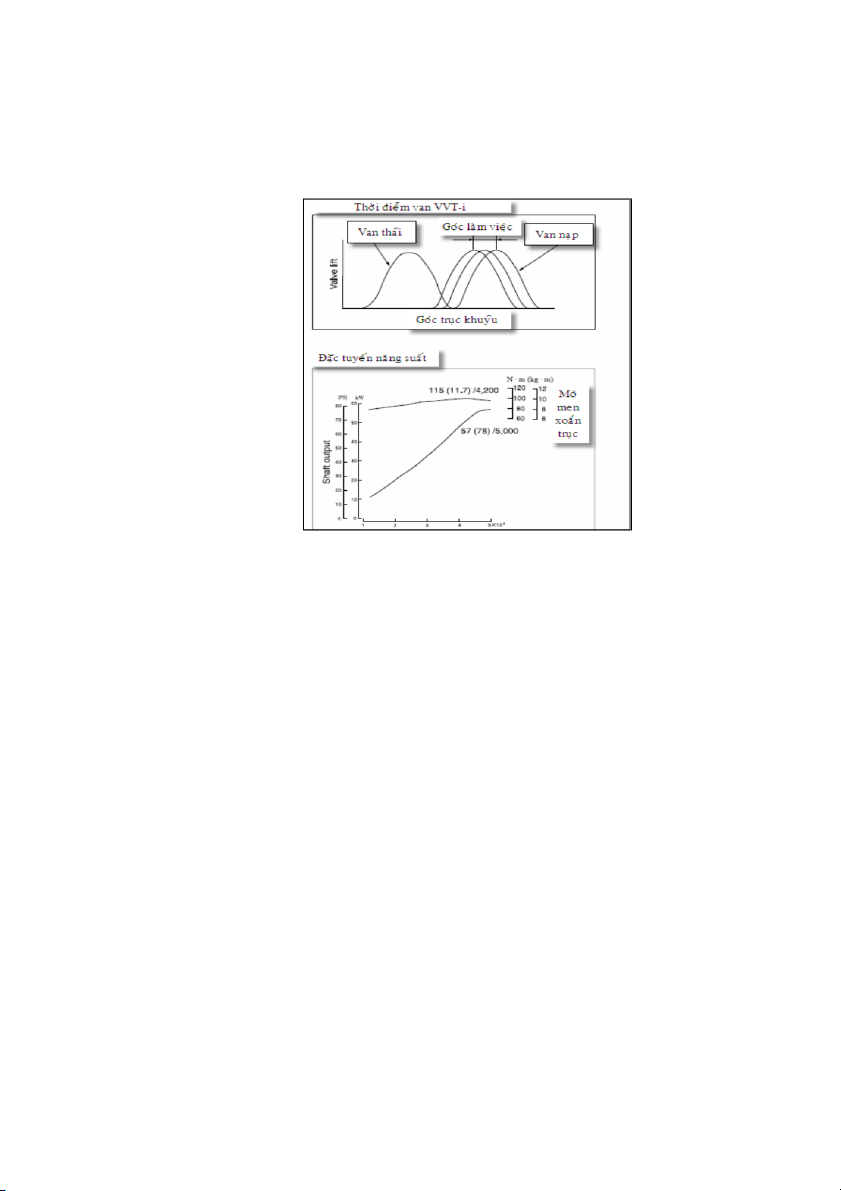
Hình 2.10 Đồ thị biểu diễn thời điểm van VVT-I và đặc tuyến năng suất
+ Thời điểm đóng trễ lớn nhất của van nạp nhờ sử dụng hệ thống VVT-I
giảm từ 1150 (sau điểm chết trên) ở xe Prius thế hệ ’01-’03 xuống còn 1050 (sau
điểm chết dưới) ở xe Prius thế hệ ’04 về sau, thời điểm chu trình Atkinson giữ
cho van nạp mở lớn nhất trong thì nén. Điều này tác động làm giảm dung tích
động cơ, làm tiêu thụ nhiên liệu ít nhất.
+Chu trình tỉ số giản nỡ cao:
Một động cơ 1.5 lít được sử dụng đạt hiệu suất cao bằng việc sử dụng chu
trình Atkinson, một trong những chu trình có tỉ số giản nỡ cao và đạt hiệu suất
nhiệt cao nhất. Bởi vì tỉ số giản nỡ (thể tích kì giản nỡ + thể tích buồng cháy)/
(thể tích buồng cháy) được tăng lên bằng việc giảm thể tích buồng đốt.
+Trong những động cơ truyền thống, bởi vì thể tích kì nén và thể tích kì
giản nở thì gần bằng nhau, tỉ số nén và tỉ số giản nỡ cũng gần như nhau. Do vậy,
thử tăng tỉ số giản nỡ cũng tăng tỉ số nén, kết quả là không tránh được sự kích nổ
và thiết lập một giới hạn trong tỉ số giản nỡ. Để giải quyết vấn đề này thời điểm
đóng van nạp được kéo dài, và trong giai đoạn đầu của kì nén, một phần hòa khí
mà đã vào trong xi lanh thì được đẩy ngược lại đường ống nạp. Theo cách này, tỉ
số giản nỡ thì được tăng mà không tăng tỉ số nén thực tế. Khi giải pháp này có
thể tăng góc mở bướm ga, nó có thể làm giảm áp suất có hại đường ống nạp
trong suốt thời gian tải cục bộ, cộng thêm giảm tổn thất nạp.
* Hệ thống nạp và ETCS-i:
+Hệ thống nạp: có một bộ điều áp lớn dùng điều chỉnh dòng không khí
được đẩy ngược trở lại trong ống nạp trong suốt thì nén của động cơ chu trình
Atkinson. Chiều dài của ống nạp được rút ngắn lại để cải thiện hiệu suất dòng
khí nạp và ống nạp được tích hợp để giảm khối lượng. Thân bướm ga được lắp
đặt phía dưới dòng khí trung tâm của bộ điều áp để đạt được sự phân phối dòng khí nạp đều đặn hơn.
+ETCS-I: với hệ thống ECTS-I trên xe Prius, ở đó không có bất cứ sợi dây
cáp bàn đạp ga nào gắn nối với bướm ga. Thay vì đó, ECM nhận các tín hiệu đầu
ra của cảm biến vị trí bàn đạp ga, và rồi tính toán phương án tối ưu để bướm ga
mở cho phù hợp, nó sử dụng mô tơ điều khiển góc mở cánh bướm ga.
*Các cảm biến của hệ thống điều khiển động cơ:
+Cảm biến đo lưu lượng khí nạp: đo lưu lượng khí nạp quyết định lưu
lượng khí nạp trong hệ thống nạp. Để đo dòng khí, một sợi dây platinum được
nung nóng được lắp đặt trong đường đi của khí nạp trên thân bướm ga. Nhiệt độ
của sợi dây nóng được duy trì tại một giá trị nhất định nhờ vào sự điều khiển của
dòng khí hiện hành xuyên qua cuộn dây nóng. Dòng khí nạp vào dần dần làm
mát cuộn dây nóng. Cường độ của dòng được đo và ghi lại đưa đến ECM cũng
giống như điện áp đầu ra của cảm biến đo lưu lượng khí.
+Cảm biến nhiệt độ khí nạp: được
bố trí bên trong cảm biến đo lưu lượng
khí nạp và sử dụng một điện trở nhiệt có hệ số nhiệt âm để đo nhiệt độ khí nạp.
khi nhiệt độ khí nạp tăng, giá trị điện trở của điện trở nhiệt và tín hiệu điện áp đến ECM giảm.
+Cảm biến nhiệt độ nước làm mát động cơ: được lắp đặt trong thân máy
và sử dụng một điện trở nhiệt có hệ số nhiệt âm để đo nhiệt độ nước làm mát
động cơ. Khi nhiệt độ nước làm mát tăng, điện trở của điện trở nhiệt và tín hiệu điện áp đến ECM giảm.
+Cảm biến vị trí bàn đạp ga: được bố trí trên cụm bàn đạp ga. Hai Ics Hall
được sử dụng để dò tìm vị trí bàn đạp ga. Đặc điểm của loại này là những tín
hiệu khác nhau được cung cấp phụ thuộc vào bàn đạp ga nhấn hay thả. ECU điều
khiển xe hybrid nhận tín hiệu và so sánh chúng để đảm bảo chắc rằng không có
bất cứ trục trặc hay hư hỏng.
+Cảm biến vị trí bướm ga: được
lắp đặt trên thân bướm ga và chuyển đổi
góc mở bướm ga thành hai tín hiệu điện áp (VTA và VTA2). ECM so sánh hai
tín hiệu điện áp để đảm bảo không có bất cứ sự sai hỏng. ECM sử dụng tín hiệu
này để tính toán độ mở của bướm ga, sau đó bộ chấp hành bướm ga điều khiển
mô tơ để điều chỉnh vị trí bướm ga tương xứng.
+Điều khiển tốc độ cầm chừng: ETCS-I
điều khiển góc bướm ga để điều
chỉnh tốc độ cầm chừng. Không có bất kỳ hệ thống điều khiển tốc độ cầm chừng
riêng biệt nào được yêu cầu. Hệ thống bao gồm điều khiển cầm chừng trong suốt
quá trình động cơ vận hành còn lạnh, điều khiển lượng khí nạp để cải thiện khả
năng khởi động của động cơ và bù tải cho những sự thay đổi chẳng hạn khi công
tắc máy lạnh A/C bật on/off.
+Cảm biến kích nổ: được lắp đặt trên thân máy và phát hiện sự kích nổ
trên động cơ. Cảm biến bao gồm một phần tử áp điện mà sinh ra một điện áp khi
thân máy dao động đến hiện tượng nổ máy biến dạng cảm biến. Nếu động cơ
kích nổ, thời điểm đánh lửa được điều chỉnh trễ để hiện tượng kích nổ xóa bỏ.
+Cảm biến vị trí trục khuỷu: (tín hiệu NE) bao gồm một đĩa tín hiệu có
răng cưa được lắp đặt trên trục khuỷu và một cuộn dây nhận cảm ứng. Đĩa tín
hiệu có 34 răng với một khe hở được tạo ra nhờ sự đứt quãng giữa các răng. Vì
vậy cảm biến sinh ra 34 dạng sóng xung cho mỗi vòng quay trục khuỷu. vì vậy
nó còn được gọi là cảm biến cảm ứng, cả hai tần suất và biên độ của tín hiệu
được tạo ra tăng theo số vòng quay của động cơ. ECM sử dụng tín hiệu NE để
quyết định tốc độ động cơ và phát hiện sự đánh lửa sai.
+Cảm biến vị trí trục cam: tín
hiệu G2 bao gồm một đĩa tín hiệu với một
răng đơn được lắp đặt trên trục cam xả và một cuộn nhận. cảm biến tạo ra một
xung tương ứng với mỗi vòng quay trục cam xả. cả biên độ và tần suất của tín
hiệu được tạo ra tăng khi tốc độ động cơ tăng. ECM sử dụng tín hiệu G2 để
quyết định vị trí của Piston số 1 cho thứ tự đánh lửa.
+Cảm biến nồng độ O2:
Trên chiếc xe Prius thế hệ ’01-’03, cảm biến bao gồm: -nhóm 1: cảm biến 1 -nhóm 2: cảm biến 2
Cảm biến 1: liên quan đến phần đầu của bộ chuyển đổi xúc tác, cảm biến
này đo lượng O2 của khí thải động cơ. ECM sử dụng đầu vào này để điều chỉnh
tiêu thụ nhiên liệu hợp lý.
Cảm biến 2: liên quan đến phần sau của bộ chuyển đổi xúc tác. Cảm biến
này dùng để đo hiệu suất bộ xúc tác. Điều khiển nồng độ O2 duy trì nhiệt độ của
cảm biến để tăng độ chính xác sự phát hiện nồng độ O2 trong khí thải.
+Cảm biến tỷ lệ không khí/xăng: trên
chiếc xe Prius thế hệ ’04 về sau.
Nhóm 1 cảm biến 1: Cảm biến O2 được thay thế bởi cảm biến A/F. Cảm biến
A/F phát hiện tỷ lệ A/F vượt qua giới hạn cho phép, cho phép ECM giảm thiểu được khí thải.
Chiếc Prius sử dụng một cảm biến A/F phẳng. Cảm biến và bộ nung nhiệt
nằm trên một cảm biến phẳng hẹp hơn nhiều so với trên cảm biến nắp côn loại
cũ. Điều này cho phép bộ nung nhiệt nung nóng nhôm và zirconia nhanh hơn,
tương xứng sự hoạt động của cảm biến bàn đạp ga. 2.3.2 MG1 và MG2 :
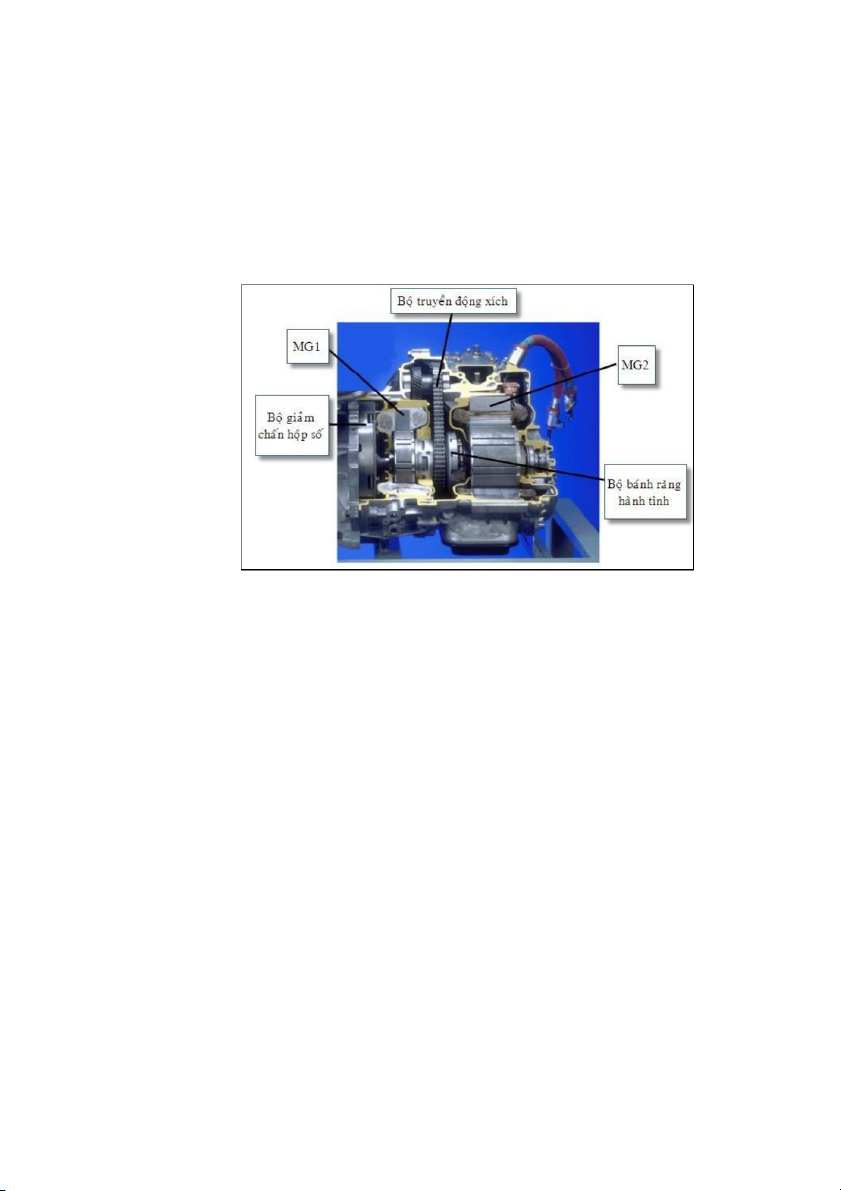
Hình 2.11 Vị trí MG1 và MG2
Cả MG1 và MG2 có trọng lượng nhẹ, đạt hiệu quả cao của loại mô tơ
điện đồng bộ nam châm vĩnh cữu xoay chiều 3 pha.
Chức năng của MG1 và MG2 kết hợp hiệu quả cao cả máy phát đồng bộ
xoay chiều và mô tơ điện. MG1 và MG2 hoạt động như nguồn cung cấp hỗ trợ
lực kéo giúp động cơ xăng khi cần thiết.
MG1: nạp lại cho ắc qui HV và cung cấp điện năng dẫn động MG2. Ngoài
ra bằng việc điều chỉnh lượng điện năng phát ra. MG1 cũng làm việc như một máy khởi động.
MG2: MG2 và động cơ xăng làm việc lẫn nhau để dẫn động bánh xe, ngoài
ra đặc tính mômen lớn hơn của MG2 giúp đạt được hoạt động động lực học tối ưu.
Trong thời gian phanh tái sinh, MG2 biến đổi động năng thành năng lượng điện
lưu trữ trong ắc qui HV. MG2 hoạt động như một máy phát.
----Những thay đổi chính trên Prius thế hệ 04 trở về sau----
Tốc độ quay của MG1 được nâng cao có thể đạt từ 6,500v/p (THS) đến
10,000v/p(THS-II). Giúp nâng cao khả năng nạp.
Cấu trúc của mỗi nam châm vĩnh cữu gắn liền bên trong rôto của MG2
được tối ưu hóa bằng thiết kế cấu trúc dạng chữ V giúp nâng cao công suất và
mô men. Hệ thống điều khiển quá điều biến giúp điều khiển MG2 tại phạm vi tốc độ trung bình.
Hình 2. 12 Sơ đồ nguyên lý và đồ thị dòng điện khi motor hoạt động [4]
* Nguyên lý hoạt động của motor:
+ Dòng điện đi từ pin điện áp cao tới bộ khuếch đại điện áp lên cao mức
600v. Tiếp sau đó dòng điện được đưa tới bộ chuyển đổi. Tại đây, dòng điện đi
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445