Điều khiển hoạt động của bướm ga điện tử | Tài liệu Môn Công nghệ Kĩ thuật ô to Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Motor bướm ga, một động cơ điện một chiều, được ECU (Bộ Điều Khiển Động Cơ) điều khiển thông qua một mạch điều khiển xung. Trong trường hợp phát hiện bất thường trong hệ thống, ECU sẽ ngắt điều khiển, và lò xo hồi của bướm ga sẽ đóng cánh lại. Điều này xảy ra khi dòng điện trong mạch motor quá cao hoặc quá thấp. ECU sẽ kiểm soát chiều quay và cường độ dòng điện để điều khiển motor bướm ga, điều chỉnh vị trí của nó. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:



Preview text:
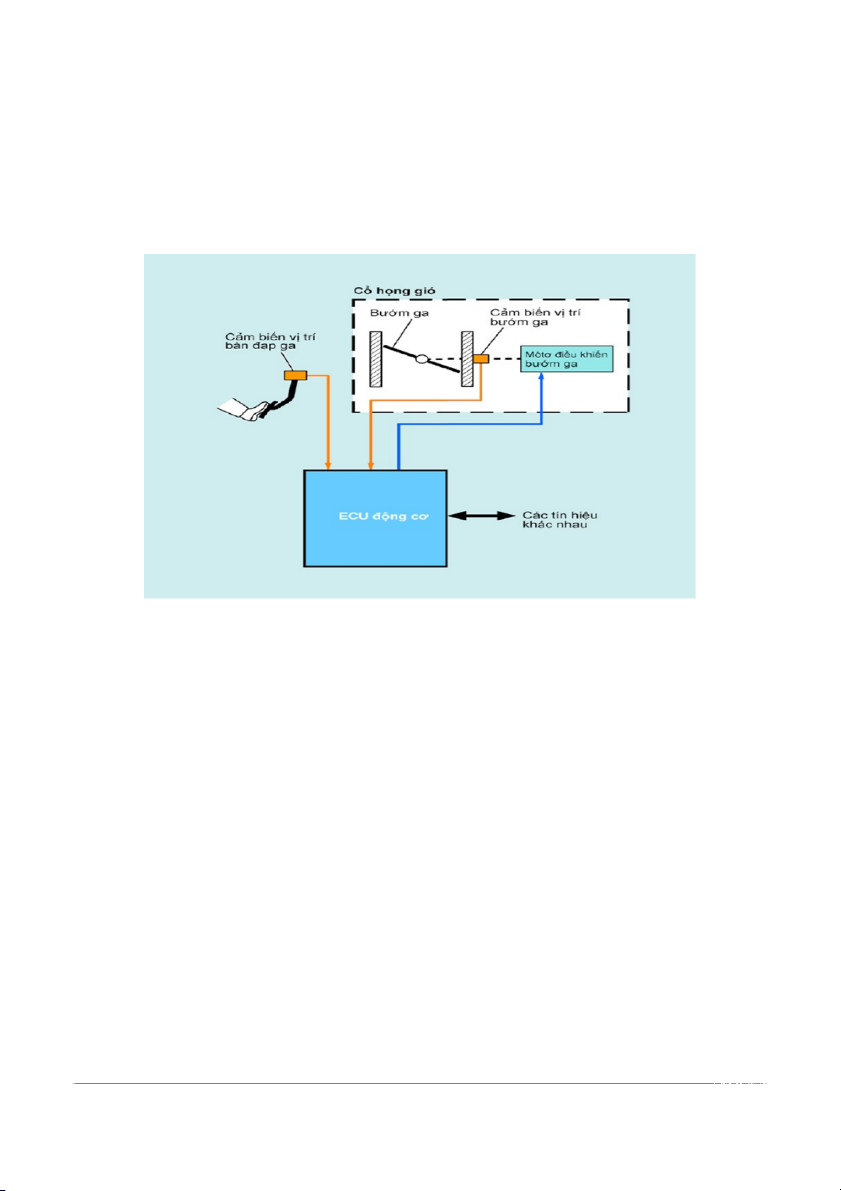
2.5. Điều khiển hoạt động của bướm ga điện tử
Motor bướm ga, một động cơ điện một chiều, được ECU (Bộ Điều Khiển
Động Cơ) điều khiển thông qua một mạch điều khiển xung. Trong trường
hợp phát hiện bất thường trong hệ thống, ECU sẽ ngắt điều khiển, và lò xo
hồi của bướm ga sẽ đóng cánh lại. Điều này xảy ra khi dòng điện trong
mạch motor quá cao hoặc quá thấp.
ECU sẽ kiểm soát chiều quay và cường độ dòng điện để điều khiển motor
bướm ga, điều chỉnh vị trí của nó. Motor bướm ga có thể hoạt động trong
một số chế độ khác nhau, bao gồm: Chế độ Dự Phòng Bướm Ga Mở Bướm Ga Đóng Chế Độ Giữ Bướm Ga
Điều Khiển Tốc Độ Không Tải
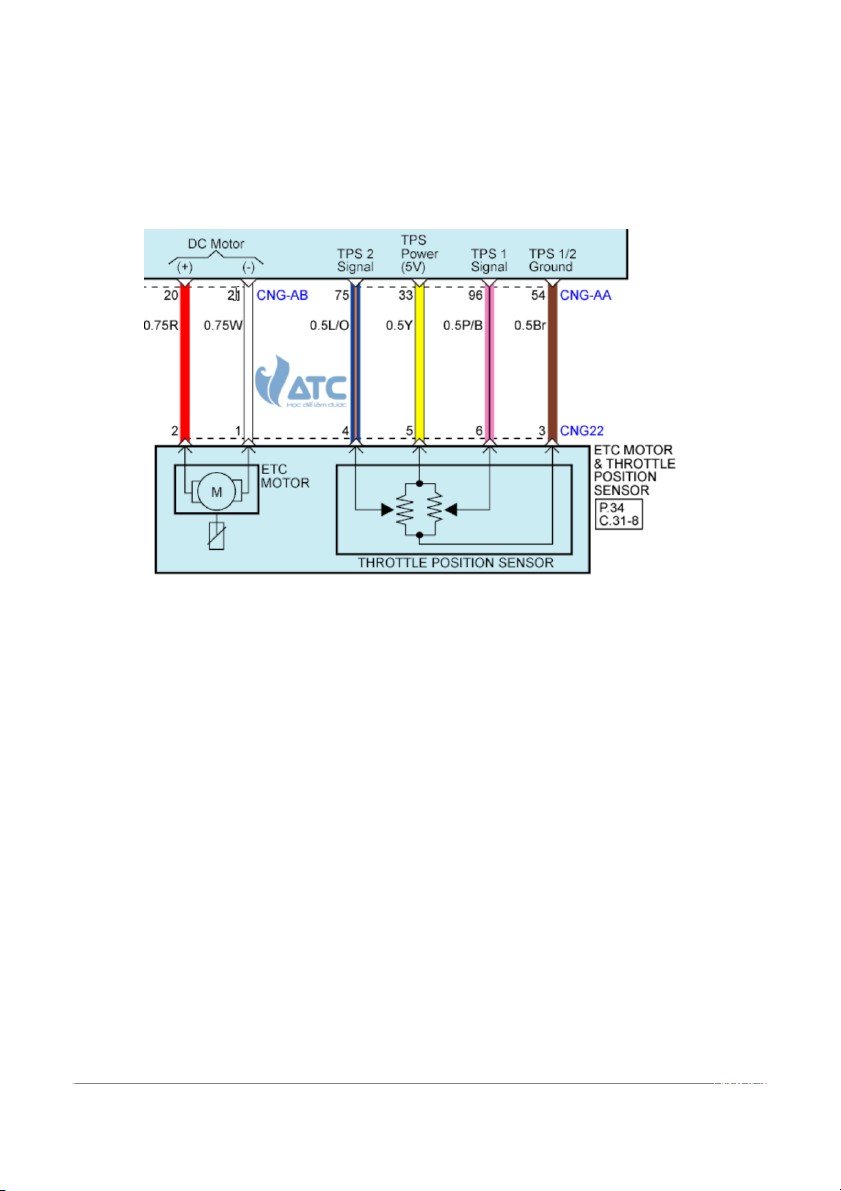
Mạch motor bướm ga bao gồm bốn transistor điều khiển trong mạch MO
(Mosfet) và MC (Motor Controller). Một transistor cấp nguồn (transistor
dương) và một transistor nối mát cho motor, cho phép ECU kiểm soát dòng điện đi qua motor.
Mạch xung được sử dụng để kiểm soát tốc độ hoạt động của bướm ga và
duy trì nó ở một vị trí cụ thể. Để điều khiển tốc độ mở/đóng của bướm ga,
tỉ lệ thời gian xung ở mức cao và thấp (khoảng thời gian hiệu dụng xung)
sẽ được điều chỉnh tùy thuộc vào điều kiện hoạt động.
Để giữ bướm ga ở vị trí xác định, ECU cung cấp dòng điện đủ để chống lại
sức căng từ lò xo hồi. Trong chế độ điều khiển kết hợp với hệ thống kiểm
soát lực kéo TRC, thời gian xung ở mức cao giảm, giới hạn vị trí không tải.
Nếu bướm ga mở quá nhanh, ECU sẽ ngắt xung điều khiển để đóng nhanh bướm ga.
2.5.1. Vị trí dự phòng.
Khi không có dòng điện được cung cấp đến motor, lò xo hồi của bướm ga
sẽ giữ nó ở vị trí dự phòng. Tình trạng này xảy ra khi chìa khóa ở vị trí OFF
hoặc khi ECU phát hiện lỗi trong hệ thống ETC. Trong trường hợp này,
không có dòng điện được cung cấp đến motor và ly hợp.
Khi hệ thống gặp lỗi và không có dòng điện đến motor, motor sẽ được
ngắt ra khỏi trục bướm ga để ngăn chặn hoạt động của motor điều khiển
cánh bướm ga. Ở trạng thái này, tốc độ không tải sẽ cao hơn so với bình
thường khi nhiệt độ động cơ đạt đến nhiệt độ hoạt động. Tuy nhiên, cánh
bướm ga sẽ di chuyển nếu người lái xe nhấn sâu vào bàn đạp ga.
Tóm lại, trong trường hợp mất điện hoặc lỗi hệ thống, bướm ga được giữ ở
vị trí an toàn để đảm bảo an toàn và tránh tình trạng không mong muốn
khi động cơ không được kiểm soát.
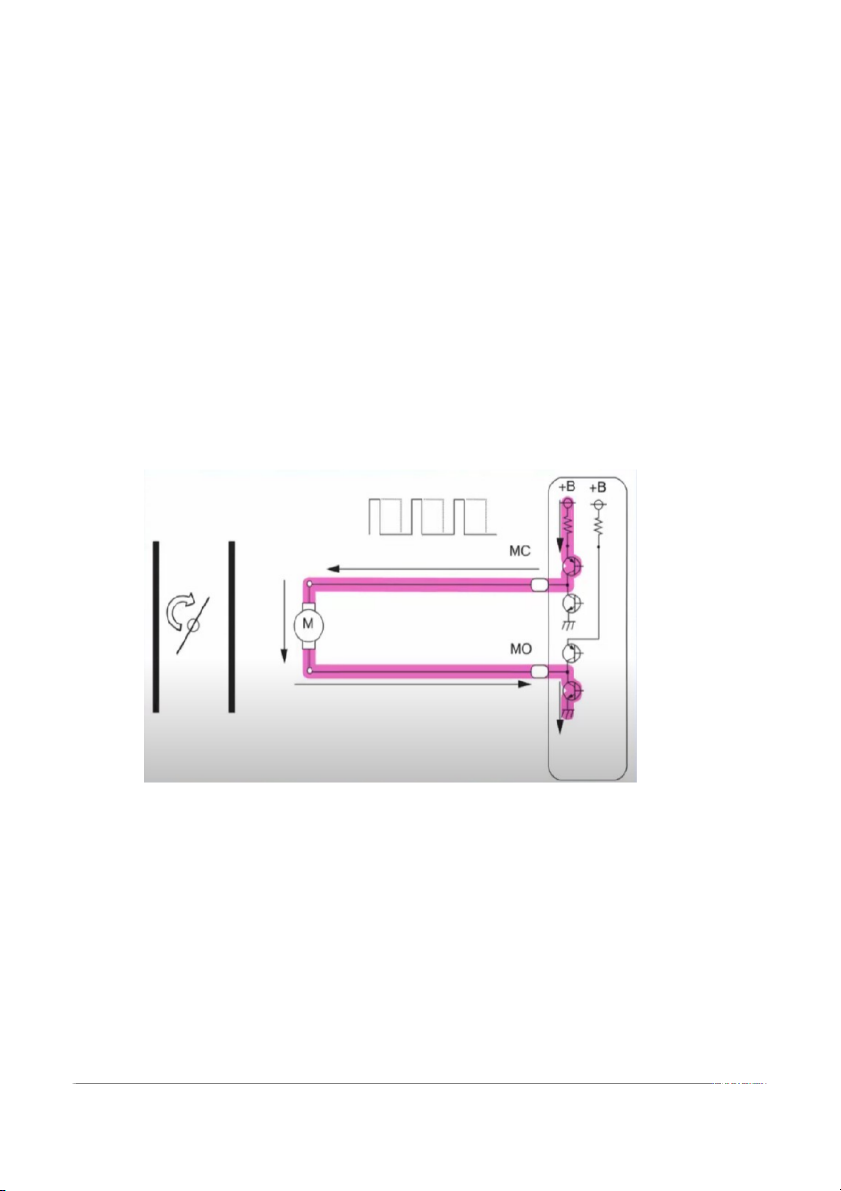
2.5.2. Điều khiển đóng bướm ga
Trong tình huống này, chiều dòng điện sẽ chảy từ cực MC (Motor
Controller) đến cực MO (Motor) của ECU. Tốc độ đóng của cánh bướm ga
phụ thuộc vào sự kết hợp của lực căng từ lò xo, xung điều khiển và hướng
của dòng điện. Để cánh bướm ga đóng từ vị trí dự phòng, hướng dòng điện
sẽ được điều chỉnh như hình dưới đây:
Trong trường hợp này, sự kết hợp của các yếu tố này sẽ tạo ra một hệ
thống đồng bộ hóa động cơ chính xác, đảm bảo rằng cánh bướm ga di
chuyển mượt mà và kiểm soát được bởi các yếu tố lực căng và dòng điện.
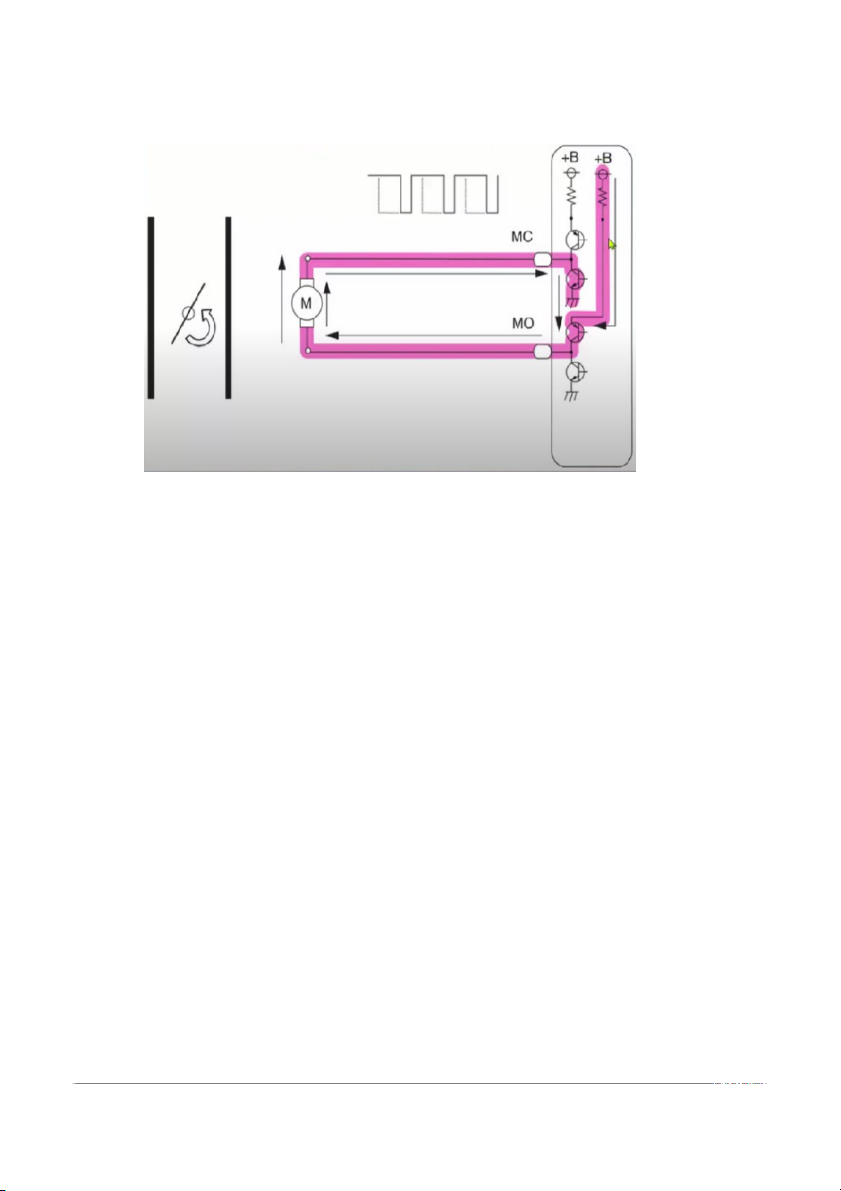
2.5.3. Điều khiển mở bướm ga
Khi cánh bướm ga đang ở vị trí dự phòng, transistor MO hoạt động như
transistor dương và transistor MC hoạt động như transistor âm. Điều này
cho phép dòng điện chảy từ transistor MO tới transistor MC của ECU, như
được minh họa trong hình vẽ, nhằm gia tăng góc mở của bướm ga.
Khi cánh bướm ga nằm dưới vị trí dự phòng, chiều dòng điện sẽ được cung
cấp theo cách tương tự như khi bướm ga đang đóng. Dòng điện sẽ chảy từ
cực MC qua motor và trở về mass ở chân của transistor MO của ECU. Tuy
nhiên, tại thời điểm này, xung điều khiển sẽ giảm xuống để tương thích
với lực căng của lò xo, nhằm tăng góc mở của bướm ga.
2.5.4. Điều khiển giữ bướm ga
Để giữ bướm ga ở vị trí cố định ECU sẽ phát ra dòng điện để vừa để để lực
từ tạo ra từ motor căng bằng với lực lò xo.
2.5.5. Điều khiển không tải
Bướm ga sẽ được điều chỉnh để duy trì tốc độ không tải mong muốn. Khi
tốc độ không tải yêu cầu mở bướm ga ở vị trí ban đầu, mạch đóng bướm
ga sẽ được kích hoạt. Khi tốc độ không tải giảm xuống dưới mức được quy
định, góc mở của bướm ga sẽ được tăng lên để tăng tốc độ động cơ.
Ngược lại, nếu tốc độ không tải đòi hỏi mở bướm ga qua vị trí ban đầu,
mạch mở bướm ga sẽ được kích hoạt. Điều này giúp duy trì sự ổn định
trong việc duy trì tốc độ không tải và đáp ứng nhanh chóng với các biến
động trong yêu cầu của động cơ.
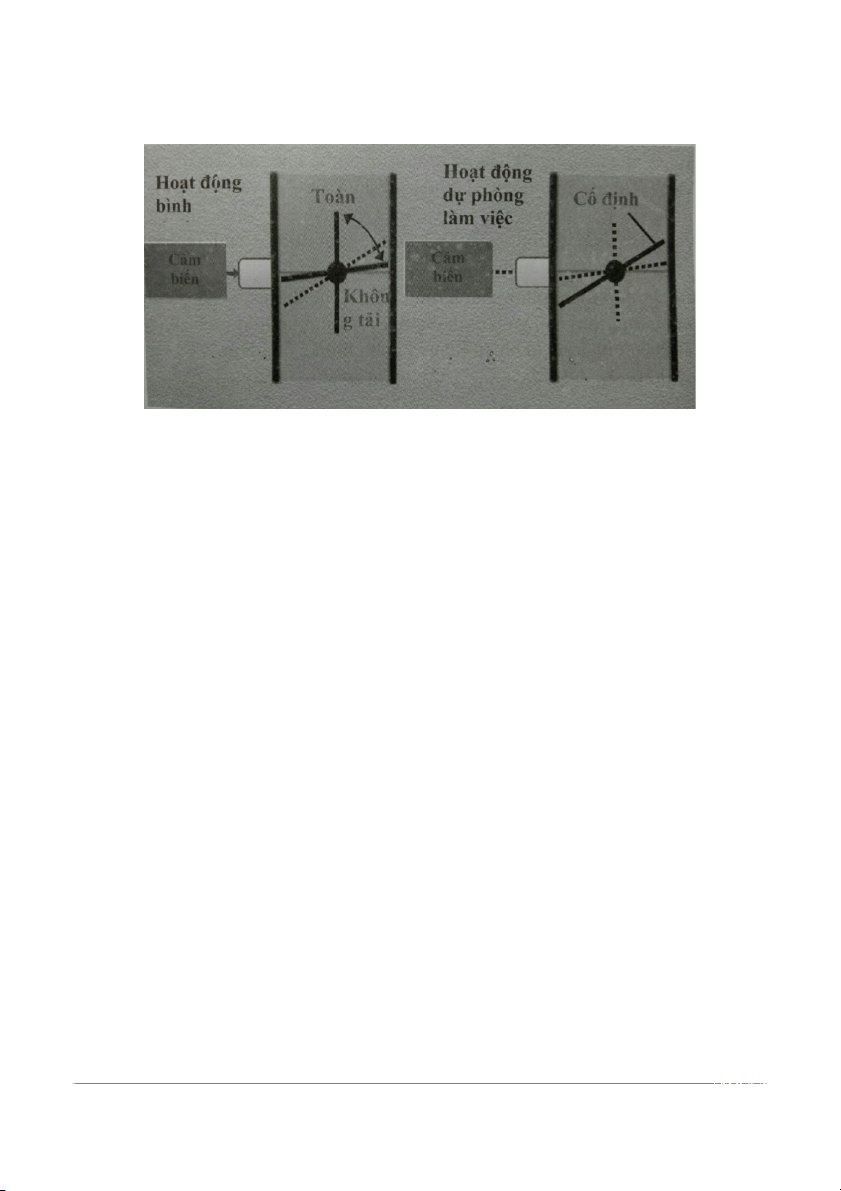
2.6.1 Hoạt động dự phòng trong trường hợp cảm biến bàn đạp ga (APPS) bị hỏng.
Cảm biến vị trí bàn đạp ga được thiết kế với một mạch cảm biến chính và
một mạch cảm biến phụ. Trong trường hợp có sự cố xảy ra trong một trong
hai mạch cảm biến, và ECU phát hiện chênh lệch điện áp không bình
thường giữa hai mạch, ECU động cơ sẽ chuyển sang chế độ hoạt động hạn
chế. Trong chế độ hoạt động hạn chế, chỉ một trong hai mạch cảm biến
còn hoạt động để tính toán góc mở của bàn đạp ga. Xe sẽ vận hành với
góc mở bướm ga bị giảm so với trạng thái bình thường.
Ngoài ra, nếu có dấu hiệu của sự cố trong cả hai mạch cảm biến, ECU
động cơ sẽ đặt bướm ga ở trạng thái không tải. Trong trạng thái này, xe
chỉ có thể chạy trong phạm vi không tải, giảm rủi ro và đảm bảo an toàn
trong khi vấn đề cảm biến đang được xử lý hoặc sửa chữa.
2.6.2 Hoạt động dự phòng trong trường hợp cảm biến bướm ga (TPS) bị hỏng.
Cảm biến vị trí bướm ga tích hợp hai mạch cảm biến chính và phụ. Trong
trường hợp một trong hai mạch cảm biến gặp sự cố, và ECU động cơ phát
hiện điện áp không bình thường giữa chúng, hệ thống sẽ ngừng cấp điện
đến mô tơ điều khiển bướm ga, chuyển đổi sang chế độ hoạt động hạn
chế. Trong tình trạng này, bướm ga sẽ được mở ở góc độ cố định, được xác
định bởi lò xo hồi, trong khi lượng nhiên liệu và thời điểm đánh lửa sẽ được
kiểm soát thông qua tín hiệu từ bàn đạp ga. Mặc dù công suất của động
cơ bị hạn chế, nhưng xe vẫn có thể tiếp tục hoạt động.
Khi ECU động cơ phát hiện sự cố trong hệ thống mô tơ điều khiển bướm
ga, nó sẽ thực hiện điều khiển tương tự như khi gặp sự cố với cảm biến vị
trí bướm ga. Điều này bao gồm việc giả lập một trạng thái hoạt động hạn
chế với mức độ mở bướm ga ổn định bằng cách sử dụng lò xo hồi, và kiểm
soát nhiên liệu và thời điểm đánh lửa thông qua tín hiệu từ bàn đạp ga.
Điều này giúp đảm bảo rằng động cơ vẫn có thể tiếp tục hoạt động một
cách an toàn và ổn định trong khi vấn đề được xử lý.
2.7. Ưu điểm và nhược điểm của bướm ga điều khiển bằng điện tử
so với bướm ga truyền thống.
Bướm ga Điều Khiển Bằng Điện Tử (ETC) mang lại nhiều ưu điểm quan
trọng so với bướm ga truyền thống, nhưng cũng đi kèm với nhược điểm cần được xem xét.
Ưu Điểm của Bướm Ga Điều Khiển Bằng Điện Tử (ETC):
Tích Hợp với Hệ Thống Điều Khiển Động Cơ (ECU):
ETC tích hợp chặt chẽ với hệ thống ECU, tạo điều kiện cho kiểm soát động
cơ phức tạp và hiệu quả.
Khả Năng Tích Hợp Các Chức Năng Thông Minh:
ETC có thể tích hợp các chức năng thông minh như kiểm soát hành trình
và kiểm soát tốc độ, nâng cao tính năng lái xe thông minh. Tiết Kiệm Nhiên Liệu:
ETC có khả năng được điều chỉnh chí tiết để tối ưu hóa hiệu suất nhiên liệu
trong nhiều điều kiện lái xe, giảm tiêu hao nhiên liệu.
Khả Năng Tích Hợp với Hệ Thống An Toàn và Kiểm Soát:
ETC có thể tích hợp với các hệ thống an toàn như kiểm soát lực kéo (TRC)
và kiểm soát ổn định (ESC), cung cấp sự ổn định và an toàn khi lái xe.
Nhược Điểm của Bướm Ga Điều Khiển Bằng Điện Tử (ETC):
Độ Phức Tạp và Chi Phí Cao:
Hệ thống ETC đòi hỏi các linh kiện và công nghệ phức tạp, làm tăng chi
phí sản xuất và sửa chữa so với bướm ga truyền thống.
Rủi Ro Tính Năng và Sự Cố Điện Tử:
Bướm ga điện tử có thể dễ bị ảnh hưởng bởi sự cố điện tử, làm tăng rủi ro
về các vấn đề kỹ thuật điện tử.
Trong tất cả, ưu điểm của ETC, như tích hợp linh hoạt và tiết kiệm năng
lượng, thường vượt trội so với nhược điểm của nó, đặc biệt trong môi
trường xe hơi hiện đại đòi hỏi hiệu suất và kiểm soát động cơ cao.
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445