Hệ thống cân bằng điện tử ESP | Đồ án tốt nghiệp môn Công nghệ kĩ thuật Ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Ngành Công nghệ Kỹ thuật ô tô ngày càng phát triển thu hút nhiều kỹ sư, những người hiểu biết, học sinh sinh viên không chỉ bao gồm toán học, khoa học mà còn cả các khía cạnh tính toán của động lực học phương tiện. Mong muốn đóng góp nền tảng lý thuyết về động lực học của xe và cung cấp cơ hội áp dụng các khái niệm lý thuyết đã học đế giải quyết các vấn đề kỹ thuật ô tô trong thế giới thực. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:












Preview text:
MỤC LỤC Trang
LỜI CẢM ƠN ................................................................................................................... vi
TÓM TẮT ........................................................................................................................ vi i
MỤC LỤC ..........................................................................................................................i x
DANH MỤC CÁC CHỮ VIẾT TẮT VÀ KÝ HIỆU .........................................................xi
DANH MỤC CÁC HÌNH .................................................................................................. xv
Chương 1. TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU ................................................. 1
1.1. LÝ DO CHỌN ĐỀ TÀI .............................................................................................. 1
1.2. MỤC TIÊU NGHIÊN CỨU........................................................................................ 2
1.3. ĐỐI TƯỢNG NGHIÊN CỨU .................................................................................... 2
1.4. PHƯƠNG PHÁP NGHIÊN CỨU ............................................................................... 2
Chương 2. TỔNG QUAN VỀ HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP) ................. 3
2.1. GIỚI THIỆU ............................................................................................................... 3
2.1.1. Khái niệm ............................................................................................................. 3
2.1.2. Lịch sử phát triển hệ thống ................................................................................... 4
2.1.3. Nguyên lý hoạt động cơ bản của hệ thống ESP ................................................... 5
2.2. MATLAB/SIMULINK VÀ ỨNG DỤNG .................................................................. 5
Chương 3. LÝ THUYẾT VỀ ĐỘNG LỰC HỌC Ô TÔ ................................................. 7
3.1. CÁC LỰC VÀ MÔ-MEN TÁC DỤNG LÊN Ô TÔ KHI CHUYỂN ĐỘNG ............ 7
3.2. ĐỘNG LỰC HỌC Ô TÔ KHI PHANH ..................................................................... 9
3.3. ĐỘNG HỌC VÀ ĐỘNG LỰC HỌC HỆ THỐNG LÁI ........................................... 11
3.3.1. Động học hệ thống lái ......................................................................................... 11
3.3.2. Động lực học hệ thống lái ................................................................................... 15
3.3.3. Quay vòng trung tính, quay vòng thiếu, quay vòng thừa và sự ảnh hưởng của
chúng đến sự ổn định ô tô khi quay vòng ...................................................................... 18
Chương 4. ĐIỀU KHIỂN HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP) ...................... 23
4.1. BA HỆ THỐNG CHỦ LỰC HỖ TRỢ HOẠT ĐỘNG ESP ..................................... 23
4.1.1. ABS, TCS và EBD ............................................................................................. 23
4.1.2. Sự can thiệp của ESP vào ba hệ thống ABS, TCS và EBD ............................... 24
4.2. CÁC CHỨC NĂNG KHÁC CỦA ESP .................................................................... 26
4.3. ĐIỀU KHIỂN HỆ THỐNG CÂN BẰNG ĐIỆN TỬ ............................................... 27
4.3.1. Hệ thống phanh vi sai ......................................................................................... 28
4.3.1.1. Mô hình xe ................................................................................................. 28
4.3.1.2. Cấu trúc điều khiển .................................................................................... 32 ix
4.3.1.3. Vận tốc lệch mong muốn ........................................................................... 33
4.3.1.4. Góc trượt ngang mong muốn ..................................................................... 33
4.3.1.5. Giá trị giới hạn trên của vận tốc lệch và góc trượt mong muốn ................ 35
4.3.1.6. Thiết kế bộ điều khiển phía trên ................................................................ 36
4.3.1.7. Thiết kế bộ điều khiển phía dưới ............................................................... 39
4.3.2. Hệ thống lái điện tử ............................................................................................ 40
4.3.2.1. Giới thiệu ................................................................................................... 40
4.3.2.2. Phân tích và tách các động lực gây nhiễu loạn điều khiển lái ................... 41
4.3.2.3. Thiết kế bộ điều khiển ............................................................................... 43 4.3.3. Phân bổ m -
ô men xoắn dẫn động đến tất cả bánh xe độc lập .............................. 45
4.3.3.1. Hệ thống dẫn động bốn bánh truyền thống ................................................ 45
4.3.3.2. Chuyển mô-men xoắn giữa bánh trái và bánh phải bằng bộ vi sai ............ 47
4.3.3.3. Kiểm soát chủ động việc truyền mô-men xoắn tới tất cả các bánh xe ...... 48
4.3.4. Cần phải kiểm soát cả vận tốc lệch hướng và góc trượt ..................................... 51
Chương 5. MÔ HÌNH HÓA ESP VỚI PHẦN MỀM MATLAB/SIMULINK ........... 53
5.1. THIẾT LP SƠ ĐỒ ĐIỀU KHIỂN .......................................................................... 53
5.2. CÁC KẾT QUẢ MÔ PHỎNG .................................................................................. 61
5.2.1. Trường hợp 1: Xe chuyển động trên đường trơn trượt, với mu = 0,4 vận tốc 50
km/h, góc đánh lái là π rad (180 độ) từ giây số 20 ........................................................ 61
5.2.2. Trường hợp 2: Xe chuyển động trên đường tốt, với mu = 0,9 vận tốc 50 km/h,
góc đánh lái là π rad (180 độ) từ giây số 20 .................................................................. 66
Chương 6. KẾT LUẬN VÀ ĐỀ NGHỊ ........................................................................... 72
6.1. KẾT LUN ............................................................................................................... 72
6.2. ĐỀ NGHỊ................................................................................................................... 72
DANH MỤC TÀI LIỆU THAM KHẢO ........................................................................... 73
PHỤ LỤC ........................................................................................................................... 76 x
DANH MỤC CÁC CHỮ VIẾT TẮT VÀ KÝ HIỆU
Chữ viết tắt hoặc Giải thích thuật ngữ
Chương 3. LÝ THUYẾT VỀ ĐỘNG LỰC HỌC Ô TÔ 𝐹𝑏𝑚𝑎𝑥
Lực phanh cực đại (tại điểm tiếp xúc bánh xe với mặt đường) 𝐹𝑏𝑓
Lực phanh của các bánh xe phía trước 𝐹𝑏𝑟
Lực phanh của các bánh xe phía sau 𝐹𝜑
Lực bám dọc giữa bánh xe với mặt đường 𝑗𝑏 Gia tốc phanh 𝑆𝑏 Quãng đường phanh 𝑡𝑏 Thời gian phanh 𝑍𝑎
Phản lực pháp tuyến tác dụng lên bánh xe 𝜇
Hệ số bám dọc giữa bánh xe với mặt đường (ℓ𝑓,ℓ𝑟,ℎ𝑔)
Tọa độ trọng tâm của ô tô
Chương 4. ĐIỀU KHIỂN HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP) ASR
Anti Slip Regulator – cũng là tên gọi khác của hệ thống chống
trượt trên xe ô tô (TCS) DSC
Dynamic Stability Control – tên gọi khác của hệ thống cân bằng điện tử (ESP) ESC
Electronic Stability Control – cũng là tên gọi khác của hệ thống
cân bằng điện tử (ESP) TRC
Traction Control system (Hệ thống kiểm soát lực kéo) – tên gọi
khác của hệ thống chống trượt trên xe ô tô (TCS) 𝐹𝑦 Lực ngang lốp 𝐹𝑥 Lực dọc lốp 𝐹𝑦𝑓ℓ
Lực ngang lốp trước bên trái 𝐹𝑦𝑓𝑟
Lực ngang lốp trước bên phải 𝐹𝑦𝑟ℓ
Lực ngang lốp sau bên trái 𝐹𝑦𝑟𝑟
Lực ngang lốp sau bên phải 𝐹𝑥𝑓ℓ
Lực dọc lốp trước bên trái xi 𝐹𝑥𝑓𝑟
Lực dọc lốp trước bên phải 𝐹𝑥𝑟ℓ
Lực dọc lốp sau bên trái 𝐹𝑥𝑟𝑟
Lực dọc lốp sau bên phải 𝑥
Vận tốc dọc tại trọng tâm xe 𝑦
Vận tốc ngang tại trọng tâm xe 𝛿 Góc lái 𝛿𝑠𝑠
Giá trị trạng thái ổn định của góc lái khi quay vòng 𝑚
Tổng khối lượng của xe 𝐼𝑧
Mô-men quán tính lệch của xe ℓ𝑤
Khoảng cách giữa bánh xe bên trái và bên phải ℓ𝑓
Khoảng cách dọc từ trọng tâm xe đến lốp trước ℓ𝑟
Khoảng cách dọc từ trọng tâm xe đến lốp sau 𝐿
Chiều dài cơ sở xe (ℓ𝑓 + ℓ𝑟) 𝜓
Vận tốc lệch hướng của xe 𝛼𝑓
Góc trượt ở lốp trước 𝛼𝑟 Góc trượt ở lốp sau 𝜎𝑥 Tỷ lệ trượt 𝜎𝑓ℓ
Tỷ lệ trượt ở bánh trước bên trái 𝜎𝑓𝑟
Tỷ lệ trượt ở bánh trước bên phải 𝜎𝑟ℓ
Tỷ lệ trượt ở bánh sau bên trái 𝜎𝑟𝑟
Tỷ lệ trượt ở bánh sau bên phải 𝜔 góc của một bánh xe 𝑤 Tốc tốc độ 𝜔𝑓ℓ
Tốc độ góc của bánh trước bên trái 𝜔𝑓𝑟
Tốc độ góc của bánh trước bên phải 𝜔𝑟ℓ
Tốc độ góc của bánh sau bên trái 𝜔𝑟𝑟
Tốc độ góc của bánh sau bên phải 𝑟𝑒𝑓𝑓 Bán kính lăn của lốp 𝐶𝛼
Độ cứng khi vào cua của lốp 𝐶𝜎
Độ cứng dọc của lốp 𝐹𝑧
Lực thẳng đứng lên lốp xii 𝜇
Hệ số bám dọc giữa bánh xe với mặt đường 𝐽𝑤
Mô-men quán tính quay của mỗi bánh xe 𝑇𝑏𝑓ℓ
Mô-men phanh trên bánh trước bên trái 𝑇𝑏𝑓𝑟
Mô-men phanh trên bánh trước bên phải 𝑇𝑏𝑟ℓ
Mô-men phanh trên bánh sau bên trái 𝑇𝑏𝑟𝑟
Mô-men phanh trên bánh sau bên phải 𝑃𝑏𝑓ℓ
Áp suất phanh trên bánh trước bên trái 𝑃𝑏𝑓𝑟
Áp suất phanh trên bánh trước bên phải 𝑃𝑏𝑟ℓ
Áp suất phanh trên bánh sau bên trái 𝑃𝑏𝑟𝑟
Áp suất phanh trên bánh sau bên phải 𝑃0
Áp suất phanh tại một bánh xe khi không phanh vi sai 𝜓𝑑𝑒𝑠
Vận tốc lệch mong muốn của người lái 𝜓target
Vận tốc lệch mong muốn cho hệ thống kiểm soát lệch 𝜓upper_bound
Giới hạn trên cho vận tốc lệch mong muốn 𝛽 Góc trượt của xe 𝛽des
Góc trượt mong muốn của xe 𝛽target
Góc trượt mong muốn cho hệ t ố h ng kiểm soát lệch 𝛽upper_bound
Giới hạn trên cho góc trượt mong muốn 𝛿driver
Đầu vào góc lái của người lái xe trong hệ thống lái điện tử 𝛿sbw
Đầu vào góc lái của hệ thống kiểm soát giảm nhiễu 𝑎𝑦𝑃
Gia tốc ngang tại điểm tách P 𝑎𝑥 Gia tốc dọc 𝑎𝑦 ại trọ ủa phương tiện −𝑐𝑔 Gia tốc ngang t ng tâm c ℓ𝑃
Khoảng cách dọc từ trọng tâm xe đến điểm P 𝑇𝑑𝑓ℓ
Mô-men xoắn truyền đến bánh trước bên trái 𝑇𝑑𝑓𝑟
Mô-men xoắn truyền đến bánh trước bên phải 𝑇𝑑𝑟ℓ
Mô-men xoắn truyền đến bánh sau bên trái 𝑇𝑑𝑟𝑟
Mô-men xoắn truyền đến bánh sau bên phải 𝑇𝑑
Mô-men xoắn truyền trên bất kỳ trục nào 𝑇clutch
Mô-men xoắn ly hợp trong một bộ vi sai chủ động xiii 𝑀𝜓𝑏
Mô-men lệch do phanh vi sai Δ𝐹𝑥𝑓
Sai lệch lực dọc lốp cầu trước cần thiết để tạo ra mô-men xoắn mong muốn 𝜂
Hằng số được sử dụng trong thiết kế hệ thống điều khiển bề mặ trượt 𝜉
Hằng số được sử dụng để xác định bề mặt trượt cho bộ điều khiể dựa trên phanh vi sai 𝜌 Tỷ lệ phanh trước-sau 𝜆
Biến được sử dụng trong mô hình lốp Dugoff 𝑓(𝜆)
Hàm được sử dụng trong mô hình lốp Dugoff 𝐴𝑤
Diện tích hãm của bánh xe 𝜇𝑏 Hệ số ma sát phanh 𝑅𝑏 Bán kính phanh 𝑞
Hằng số được xác định bởi tỷ số truyền trong vi sai chủ động xiv DANH MỤC CÁC HÌNH Trang
Chương 2. TỔNG QUAN VỀ HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP)
Hình 2.1. Hệ thống cân bằng điện tử - ESP ......................................................................... 3
Hình 2.2. Biểu tượng Matlab ............................................................................................... 6
Hình 2.3. Biểu tượng Simulink ............................................................................................ 6
Chương 3. LÝ THUYẾT VỀ ĐỘNG LỰC HỌC Ô TÔ
Hình 3.1. Lực tác động vào bánh xe .................................................................................... 8
Hình 3.2. Mô-men tác động lên ô tô .................................................................................... 8
Hình 3.3. Ảnh hưởng của lực bám đến vòng tròn ma sát Kamm ........................................ 9
Hình 3.4. Sơ đồ động học quay vòng của ô tô khi bỏ qua biến dạng ngang .................... 12
Hình 3.5. Sơ đồ động học quay vòng của ô tô có hai bánh dẫn hướng phía trước ........... 13
Hình 3.6. Sơ đồ động lực học quay vòng của ô tô có hai bánh xe dẫn hướng phía trước
........................................................................................................................................... 16
Hình 3.7. Quỹ đạo chuyển động của xe trong 3 trường hợp quay vòng: Intended Path –
Trung tính, Understeer – Thiếu, Oversteer – Thừa ........................................................... 18
Hình 3.8. Sơ đồ chuyển động ô tô có tính chất đủ lái ....................................................... 19
Hình 3.9. Sơ đồ chuyển động ô tô có tính chất thiếu lái ................................................... 20
Hình 3.10. Sơ đồ chuyển động ô tô có tính chất thừa lái .................................................. 21
Chương 4. ĐIỀU KHIỂN HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP)
Hình 4.1. Đồ thị thể hiện tỷ lệ trượt giữa bánh xe với mặt đường khi có sự can thiệp của
ABS ................................................................................................................................... 23
Hình 4.2. Tốc độ xe và tốc độ bánh xe tương ứng khi phanh với ABS ............................ 24
Hình 4.3. ESP ngăn cản hiện tượng Thiếu lái (A) và Thừa lái (B) bằng ABS ................. 25
Hình 4.4. Mức độ tự do cho kiểu xe đối với hệ thống dựa trên phanh vi sai ................... 28
Hình 4.5. Sơ đồ động lực học thân xe ............................................................................... 29
Hình 4.6. Động học bánh xe ............................................................................................. 30
Hình 4.7. Cấu trúc của hệ thống phanh vi sai ................................................................... 32
Hình 4.8. Hệ thống lái điện tử (steer-by-wire) ................................................................. 40
Hình 4.9. Cấu trúc của hệ thống điều khiển ổn định lái điện tử ....................................... 41
Hình 4.10. Nhiệm vụ đi theo đường dẫn của người lái .................................................... 41 xv
Hình 4.11. Hệ 4 bánh dẫn động (4WD) ............................................................................ 46
Hình 4.12. Ví dụ một trường hợp bộ vi sai truyền mô-men xoắn ly hợp kép sử dụng cho
cầu trước, cầu sau và hộp truyền động.............................................................................. 48
Hình 4.13. Các loại hệ thống kiểm soát ổn định lệch và đặc điểm của chúng trong quá
trình tăng tốc của xe .......................................................................................................... 49
Chương 5. MÔ HÌNH HÓA ESP VỚI PHẦN MỀM MATLAB/SIMULINK
Hình 5.1. Thiết lập sơ đồ khối hệ thống cân bằng điện tử dựa trên phanh vi sai ............. 53
Hình 5.2. Sơ đồ mô phỏng trong Matlab/Simulink .......................................................... 53
Hình 5.3. Giao diện mô phỏng xe chạy trên đường thử ................................................... 54
Hình 5.4. Bên trong khối điều khiển ESP ......................................................................... 55
Hình 5.5. Khối tạo góc lái của bánh xe ............................................................................. 55
Hình 5.6. Bên trong Khối tạo góc lái của bánh xe ............................................................ 55
Hình 5.7. Khối tính vận tốc lệch hướng mong muốn ....................................................... 56
Hình 5.8. Bên trong Khối tính vận tốc lệch hướng mong muốn ...................................... 56
Hình 5.9. Khối tính góc trượt ở lốp trước ......................................................................... 56
Hình 5.10. Bên trong Khối tính góc trượt ở lốp trước ...................................................... 57
Hình 5.11. Khối tính góc trượt ở lốp sau .......................................................................... 57
Hình 5.12. Bên trong Khối tính góc trượt ở lốp sau ......................................................... 57
Hình 5.13. Khối tạo tín hiệu phanh ................................................................................... 58
Hình 5.14. Khối tạo áp suất phanh .................................................................................... 58
Hình 5.15. Bên trong Khối tạo áp suất phanh ................................................................... 59
Hình 5.16. Khối phanh ABS ............................................................................................. 60
Hình 5.17. Bên trong Khối phanh ABS ............................................................................ 60
Hình 5.18. Góc trượt ở bánh trước (đường màu đỏ) và bánh sau (đường màu xanh lá) của
xe không có ESP (mu = 0,4) ............................................................................................. 62
Hình 5.19. Góc trượt ở bánh trước (đường màu đỏ) và bánh sau (đường màu xanh lá) của
xe có ESP (mu = 0,4) ........................................................................................................ 62
Hình 5.20. Vận tốc lệch (đường màu đỏ) và vận tốc lệch mong muốn (đường màu xanh
dương) của xe khi không có ESP (mu = 0,4) .................................................................... 63
Hình 5.21. Vận tốc lệch (đường màu đỏ) và vận tốc lệch mong muốn (đường màu xanh
dương) của xe khi có ESP (mu = 0,4) ............................................................................... 63
Hình 5.22. Quỹ đạo của xe khi không có ESP (mu = 0,4) ................................................ 64 xvi
Hình 5.23. Quỹ đạo của xe khi có ESP (mu = 0,4) ........................................................... 64
Hình 5.24. Quỹ đạo (phóng to) của xe khi không có ESP (mu = 0,4) .............................. 65
Hình 5.25. Quỹ đạo (phóng to) của xe khi có ESP (mu = 0,4) ......................................... 65
Hình 5.26. Góc trượt ở bánh trước (đường màu đỏ) và bánh sau (đường màu xanh lá) của
xe không có ESP (mu = 0,9) ............................................................................................. 67
Hình 5.27. Góc trượt ở bánh trước (đường màu đỏ) và bánh sau (đường màu xanh lá) của
xe có ESP (mu = 0,9) ........................................................................................................ 67
Hình 5.28. Vận tốc lệch (đường màu đỏ) và vận tốc lệch mong muốn (đường màu xanh
dương) của xe khi không có ESP (mu = 0,9) .................................................................... 68
Hình 5.29. Vận tốc lệch (đường màu đỏ) và vận tốc lệch mong muốn (đường màu xanh
dương) của xe khi có ESP (mu = 0,9) ............................................................................... 68
Hình 5.30. Quỹ đạo của xe khi không có ESP (mu = 0,9) ................................................ 69
Hình 5.31. Quỹ đạo của xe khi có ESP (mu = 0,9) ........................................................... 69
Hình 5.32. Quỹ đạo (phóng to) của xe khi không có ESP (mu = 0,9) .............................. 70
Hình 5.33. Quỹ đạo (phóng to) của xe khi không có ESP (mu = 0,9) .............................. 70 xvii
Chương 1. TỔNG QUAN VỀ ĐỀ TÀI NGHIÊN CỨU
1.1. LÝ DO CHỌN ĐỀ TÀI
Ngành Công nghệ Kỹ thuật ô tô ngày càng phát triển thu hút nhiều kỹ sư, những
người hiểu biết, học sinh sinh viên không chỉ bao gồm toán học, khoa học mà còn cả các
khía cạnh tính toán của động lực học phương tiện. Mong muốn đóng góp nền tảng lý thuyết
về động lực học của xe và cung cấp cơ hội áp dụng các khái niệm lý thuyết đã học để giải
quyết các vấn đề kỹ thuật ô tô trong thế giới thực.
Ngoài đánh giá hiệu suất của xe, nâng cao tính năng động của xe, phải phát triển hiểu
biết về khả năng an toàn ô tô để giảm thiểu các tai nạn có thể xảy ra. Các nghiên cứu đánh
giá đã chỉ ra rằng việc trang bị hệ thống cân bằng điện tử ESP trên ô tô có thể làm giảm
đáng kể các vụ va chạm, tử vong và thương tích nghiêm trọng. Một nghiên cứu của Thụy
Điển vào năm 2003 cho thấy rằng những chiếc xe được trang bị ESP ít có nguy cơ xảy ra
va chạm hơn 22% so với những chiếc không có. Số vụ tai nạn trong điều kiện ẩm ướt và
tuyết rơi ít hơn 32% và 38% tương ứng [1]. Tại Nhật Bản, một nghiên cứu đã chỉ ra rằng
sự ổn định điện tử làm giảm sự liên quan đến va chạm từ 30-35% [2]. Tại Đức, một nghiên
cứu chỉ ra mức giảm tương tự trong khi một nghiên cứu khác cho thấy sự cố “mất kiểm
soát” giảm từ 21% xuống 12% [3]. Đó là những lợi ích rất lớn mà ESP mang lại.
Việc nghiên cứu tính năng động lực và điều khiển hệ thống cân bằng điện tử giúp
chúng ta nắm bắt các kiến thức để đánh giá sự an toàn, khả năng đáp ứng nhu cầu người
lái, khả năng thích nghi của phương tiện trong mọi điều kiện ngoại cảnh. Ngoài ra nó còn
góp phần vào nguồn tài liệu tham khảo phục vụ nghiên cứu trong quá trình học tập.
Vì những lý do trên nhóm em xin chọn đề tài “Nghiên cứu động lực học và điều
khiển hệ thống cân bằng điện tử ô tô” làm đề tài tốt nghiệp. 1
1.2. MỤC TIÊU NGHIÊN CỨU
- Hiểu rõ được khái niệm, cấu tạo và hoạt động của hệ thống cân bằng điện tử ESP.
- Phân tích động lực học hệ thống cân bằng điện tử dựa trên phân tích động lực học
hệ thống phanh và hệ thống lái.
- Nghiên cứu phương pháp điều khiển hệ thống ESP dựa trên các sơ đồ và các phương trình toán học.
- Xây dựng mô hình mô phỏng hệ thống ESP bằng công cụ MathWorks.
1.3. ĐỐI TƯỢNG NGHIÊN CỨU
- Đối tượng nghiên cứu của đề tài là hệ thống cân bằng điện tử trang bị phổ biến trên các xe ô tô chở khách
- Phạm vi nghiên cứu tập trung vào hai hệ thống chính trên ô tô là hệ thống phanh và
hệ thống lái, cụ thể: Hệ thống phanh vi sai
Hệ thống lái điện tử Phân bổ m -
ô men xoắn độc lập đến từng bánh xe riêng lẻ
1.4. PHƯƠNG PHÁP NGHIÊN CỨU
- Phương pháp nghiên cứu tài liệu
- Phương pháp dịch thuật tài liệu
- Phương pháp mô hình hóa và mô phỏng 2
Chương 2. TỔNG QUAN VỀ HỆ THỐNG CÂN BẰNG ĐIỆN TỬ (ESP)
2.1. GIỚI THIỆU 2.1.1. Khái niệm
Như ta đã biết, hầu hết các vụ tai nạn ô tô xảy ra đa số nguyên nhân là do phanh gấp hoặc
chuyển hướng đột ngột. Khi đó, ô tô cơ bản không thể “tuân” theo sự điều khiển của người
lái, gây ra các hiện tượng “văng đầu” hoặc “văng đuôi” hoặc có thể lật xe. Trường hợp nhẹ
hơn, các bánh xe có thể bị trượt làm lệch hướng chuyển động thẳng của ô tô.
Sau đó một số hệ thống hỗ trợ ra đời nhằm cải thiện các hiện tượng trên và làm cho
ô tô ổn định hơn, hệ thống chống bó cứng phanh (ABS) và hệ thống phân phối lực phanh
điện tử (EBD) là 2 ví dụ điển hình.
Tuy nhiên, 2 hệ thống trên chỉ phần nào đáp ứng yêu cầu về sự ổn định. Cụ thể, nó
chỉ giúp ô tô giảm thiểu hiện tượng trượt dọc bánh xe khi đang di chuyển trên đường thẳng.
Vậy, nếu xe đang chuyển hướng hay quay vòng mà xe mất ổn định thì sao? Hệ thống cân
bằng điện tử (ESP) ra đời đảm nhiệm vai trò này.
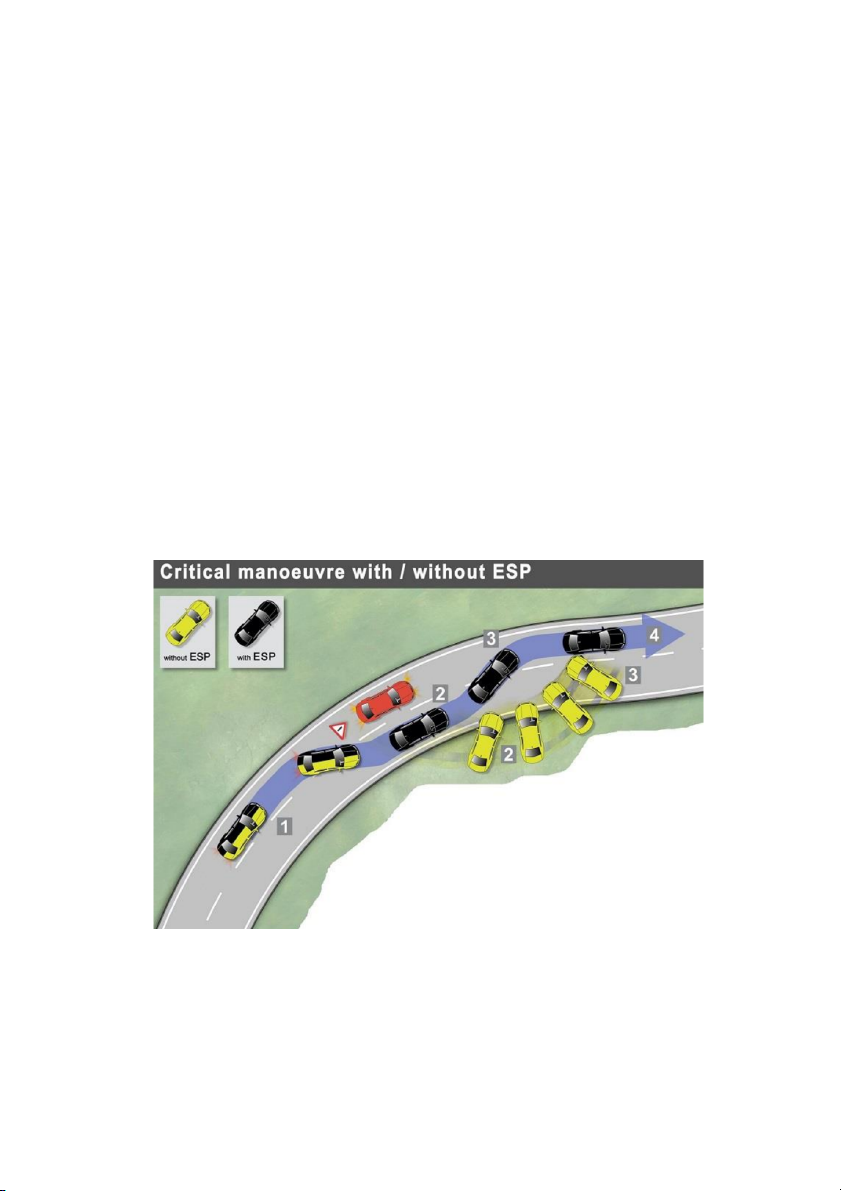
Hình 2.1. Hệ th ng cân b ố
ằng điện tử - ESP [ ] 4 (Xe màu đen c trang b ó
ị hệ th ng ESP ố
còn Xe màu vàng không có trang bị hệ th ng ESP) ố 3
(ESP – viết tắt của từ Electronic Stability Program) là hệ thống cân bằng điện tử và
còn có tên gọi khác là “Electronic Stability Control – ESC”. Hệ thống ESP được thiết lập
và trang bị trên xe ô tô với mục đích giúp xe di chuyển ổn định, cân bằng ngay cả khi đi
thẳng hoặc đang chuyển hướng hoặc đang quay vòng, từ đó đảm bảo tính an toàn khi xe tham gia giao thông.
ESP luôn luôn được kích hoạt trên xe. Nếu chiếc xe di chuyển theo một hướng khác,
ESP sẽ phát hiện một tình huống nguy hiểm và phản ứng ngay lập tức – kể cả không có sự
can thiệp của người lái xe. Nó sử dụng hệ thống phanh của xe để trả lại cho xe quỹ đạo của nó.
ESP không chỉ can thiệp ở hệ thống phanh, mà còn có thể can thiệp vào động cơ của
xe giúp tăng/giảm tốc các bánh xe. Do đó quỹ đạo của xe được đảm bảo, trong giới hạn
của các định luật vật lý.
2.1.2. Lịch sử phát triển hệ thốn g [4]
Hệ thống cân bằng điện từ xuất hiện lần đầu tiên trên 2 chiếc xe của BMW năm 1995,
đó là 750iL và 850Ci với ộ
đ ng cơ trang bị trên xe là 5.4L V12. Hệ thống cân bằng điện tử
này lấy tên là DSC (Dynamic Stability Control) và được sản xuất bởi Bosch - một hãng nổi
tiếng trong lĩnh vực thiết bị cơ khí và điều khiển điện tử của Đức. Hệ thống được trang bị
cảm biến tại các bánh xe với tần số 50 lần mỗi giây.
Một năm sau khi hệ thống cân bằng điện tử ra đời ,Mercedes-Benz cũng bắt đầu ứng
dụng công nghệ này lên mẫu xe của mình và lấy tên là ESP. Mẫu xe đầu tiên của Mercedes-
Benz lắp đặt hệ thống cân bằng điện tử là S600. Cũng giống như BMW, Mercedes chọn
đối tác cung cấp hệ thống là Bosch và tự mình đưa ra những quy định về những ngưỡng
giá trị tối đa trước khi hệ thống ESP hoạt động. Nhưng một điểm nổi bật hơn trong hệ
thống ESP của Mercedes là khả năng nhanh chóng lấy lại vị trí ổn định của xe sau khi ESP hoạt động.
Năm 1997, Cadillac công bố hệ thống cân bằng điện tử của mình với cái tên STS
(StabiliTrak stability). Giống như hệ thống của BMW và Mercedes, Cadil ac sử dụng 3 vị
trí cảm biến, đó là cảm biến góc lái, cảm biến hướng của xe và cảm biến tốc độ bánh xe.
Năm 1998, Lexus đưa ra cái tên VSC (Vehicle Stability Control) cho hệ thống cân bằng
điện tử của mình. Ngoài việc trang bị các cảm biến như Cadillac hay Mercedes, Lexus lắp 4
thêm cảm biến đo áp suất phanh nhằm phối hợp với hệ thống phân bổ lực phanh EBD, giúp
xe đạt trạng thái ổn định nhất.
2.1.3. Nguyên lý hoạt động cơ bản của hệ thống ESP
Thông thường, một chiếc xe được trang bị hệ thống ESP thì nó cũng sẽ bao gồm các
hệ thống: chống bó cứng phanh (ABS), hệ thống chống trượt (TCS), hệ thống phân phối
lực phanh điện tử (EBD). Các hệ thống này phối hợp linh hoạt với nhau nhằm đảm bảo sự
ổn định tốt nhất cho chiếc xe khi đi chuyển. Ba hệ thống này sẽ được trình bày rõ hơn trong
các phần phụ phía dưới.
Trong suốt quá trình điều khiển xe, mọi hoạt động đều được cảm biến ghi lại và truyền
về liên tục cho hệ thống điều khiển trung tâm, để so sánh với những chương trình đã tính
toán từ trước. Nếu đột nhiên có hiện tượng bất thường xảy ra như xe đi lệch quỹ đạo ở tốc
độ cao hay vào cua bị phanh gấp thì ngay lập tức hệ t ố
h ng ESP sẽ hoạt động theo những
chương trình đã được cài đặt. Lúc này cơ cấu điều khiển thủy lực trong hệ thống sẽ thông
qua chương trình điện tử can thiệp vào hệ thống chống bó cứng phanh ABS, nhằm điều
chỉnh góc xoay và tốc độ của từng bánh xe sao cho cân bằng với góc trượt quán tính của
xe. Ngoài ra cơ cấu này sẽ tự động giảm công suất tức thời động cơ điều khiển giảm tốc độ
vòng quay tại các bánh đến khi bánh xe đủ độ bám đường cần thiết, đưa xe về vùng làm
việc an toàn. Nhờ vậy mà xe không thể bị lệch hướng đột ngột hay lật xe.
2.2. MATLAB/SIMULINK VÀ ỨNG DỤNG
MATLAB là phần mềm cung cấp môi trường tính toán số và lập trình, do công ty
MathWorks thiết kế. MATLAB cho phép tính toán số với ma trận, vẽ đồ thị hàm số hay
biểu đồ thông tin, thực hiện thuật toán, tạo các giao diện người dùng và liên kết với những
chương trình máy tính viết trên nhiều ngôn ngữ lập trình khác.
Với thư viện Toolbox, MATLAB cho phép mô phỏng tính toán, thực nghiệm nhiều mô
hình trong thực tế và kỹ thuật.
Một trong những ứng dụng phổ biến của MATLAB là vẽ đồ thị, một tính năng được trau
chuốt trong MATLAB; với rất nhiều kiểu đồ thị khác nhau như biểu đồ dạng đường, biểu
đồ chấm điểm, các lớp màu (patch) hai chiều, đường đồng mức và các đường cong, mặt 5
cong ba chiều. Ngoài ra MatLab còn cung cấp giao diện để người dùng trực tiếp biên tập
hình vẽ, điền vào các ghi chú theo ý muốn. Hình 2.2. Bi ng Matlab ểu tượ [ ] 5
Simulink là một môi trường lập trình đồ họa dựa trên MATLAB để mô hình hóa, mô
phỏng và phân tích các hệ thống động lực học đa miền. Giao diện chính là một công cụ sơ
đồ khối đồ họa và một bộ thư viện khối có thể tùy chỉnh. Cung cấp tích hợp chặt chẽ với
phần còn lại của môi trường MATLAB và có thể điều khiển MATLAB hoặc được tập lệnh
từ nó. Simulink được sử dụng rộng rãi trong điều khiển tự động và xử lý tín hiệu kỹ thuật
số để mô phỏng đa miền và thiết kế dựa trên mô hình. Hình 2.3. Bi ng Simulink ểu tượ [6]
TỔNG KẾT CHƯƠNG 2:
Chương 2 giới thiệu tổng quan về hệ thống cân bằng điện tử ESP. Ra đời từ năm 1995
và không ngừng phát triển cho đến nay với nhiều công nghệ vô cùng hiện đại. Mục đích
cốt lõi là phải làm sao cho chiếc xe có thể di chuyển ở mọi điều kiện mà vẫn giữ được sự
cân bằng, ổn định. Cũng trong chương này môi trường Matlab/Simulink được giới thiệu,
đây cũng là công cụ mà chúng em sử dụng để thực hiện các mô phỏng liên quan đến hệ
thống cân bằng điện tử. 6
Chương 3. LÝ THUYẾT VỀ ĐỘNG LỰC HỌC Ô TÔ
Động lực học ô tô giải quyết 2 vấn đề:
Về lực trên ô tô mà lực này là do sự điều khiển của người lái, do hoạt động của ô tô.
Dưới tác dụng của lực đó, ô tô sẽ ứng xử như thế nào? chuyển động ra sao? và cuối cùng
là quỹ đạo của nó sẽ như thế nào? Động lực học ô tô cũng nghiên cứu tính chất động lực
học hay nghiên cứu sức mạnh của xe (tốc độ cực đại, khả năng leo dốc, gia tốc cực đại, …)
Về khả năng cân bằng, ổn định khi chuyển động. Đây là một vấn đề vô cùng quan
trọng, bởi vì nó ảnh hưởng đến sự an toàn của không chỉ phương tiện giao thông mà còn
người tham gia giao thông. Cho nên, ổn định chuyển động phải được nghiên cứu một cách
cẩn thận để đảm bảo người lái có thể điều khiển ô tô tuân theo ý muốn của mình, đảm bảo
an toàn giao thông, không gây ra các tai nạn do tình trạng chuyển động ô tô sinh ra.
Trong chương này, chủ yếu đề cập đến động lực học của 2 hệ thống mà nó ảnh hưởng rất
lớn đến khả năng cân bằng và ổn định khi chuyển động của ô tô. Đó là hệ thống phanh và hệ thống lái.
3.1. CÁC LỰC VÀ MÔ-MEN TÁC DỤNG LÊN Ô TÔ KHI CHUYỂN ĐỘNG
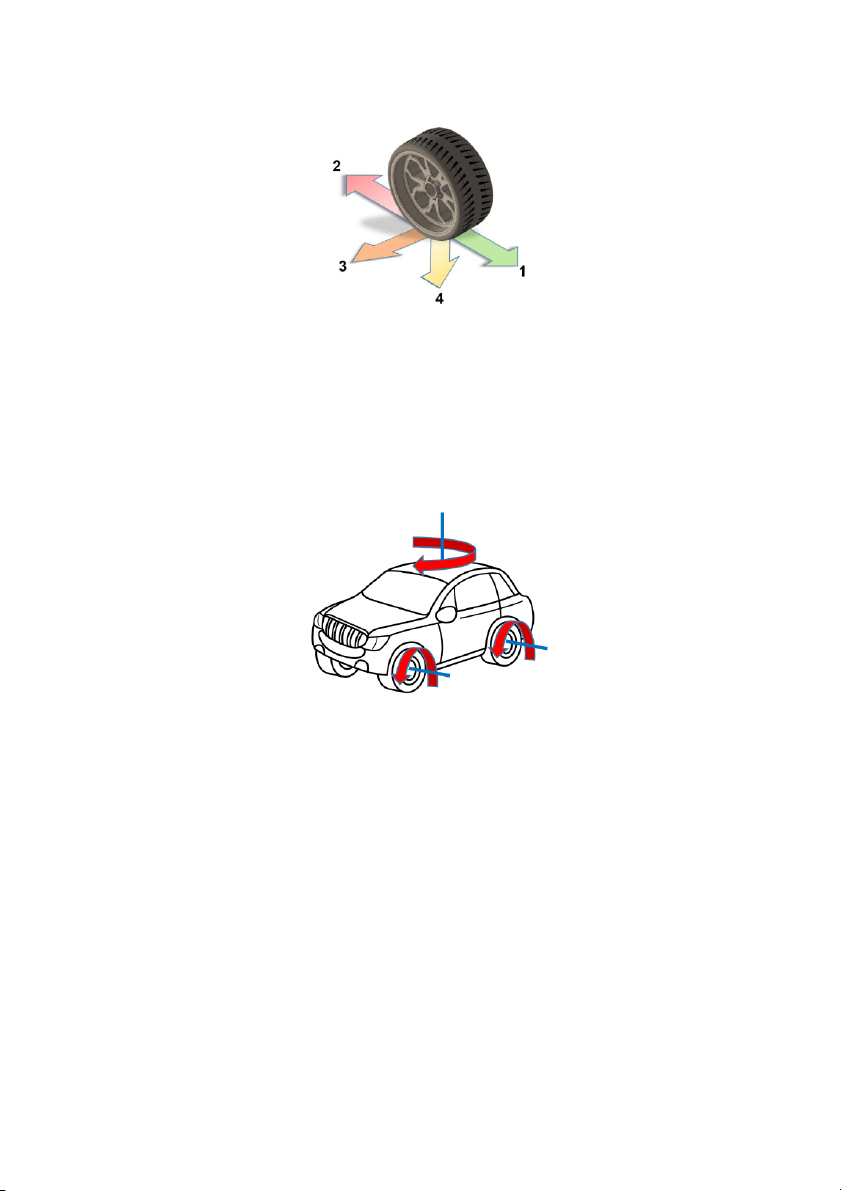
Khi ô tô chuyển động, ngoài trọng lực còn có những thành phần khác (xem Hình 3.1) tác dụng vào bánh xe như:
- Lực kéo (1) (Tractive Force)
- Áp lực phanh (2) (Brake Pressure) – Lực chống lại lực kéo
- Lực ngang (3) (Lateral Force) – Lực tạo ra khả năng quay vòng cho ô tô
- Lực bám mặt đường (4) (Adhesion Force) – Lực bám là kết quả chính của trọng lực,
lực ma sát và một số lực khác. 7
Hình 3.1. Lực tác động vào bánh xe
Bên cạnh các lực tác dụng vào bánh xe, ô tô còn chịu tác động của (Hình 3.2):
- Mô-men lệch (trục đứng) (Yaw moment) – Mô-men giúp ô tô chuyển hướng
- Mô-men bánh xe (các trục ngang bánh xe) (Wheels Moment) – Mô-men giúp cho ô tô chuyển động
Và một số lực khác như lực khí động học. Hình 3.2. M -
ô men tác động lên ô tô
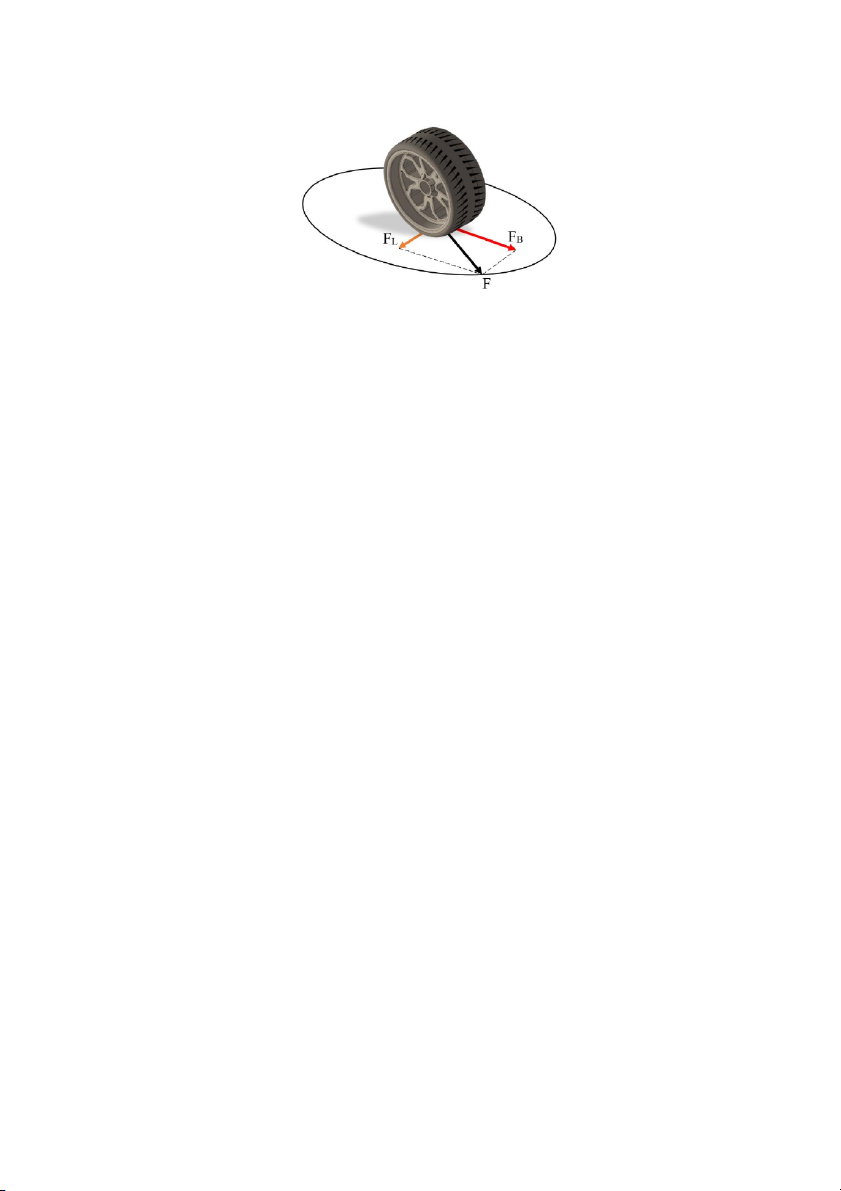
Các lực tác dụng lên bánh xe được liệt kê ở trên liên hệ với nhau qua một vòng tròn
được gọi là vòng tròn lực hay vòng tròn Kamm. Bằng cách sử dụng vòng tròn này chúng
ta có thể đánh giá được khả năng bám của lốp xe với mặt đường.
Vòng tròn Kamm có tâm đặt tại điểm tiếp xúc giữa lốp xe với mặt đường (Hình 3.3).
Bán kính của vòng tròn Kamm được định nghĩa bởi lực bám lốp xe, hay nói cách khác bán
kính vòng tròn này sẽ nhỏ đi khi lực bám giữa bánh xe và mặt đường nhỏ và ngược lại bán
kính vòng tròn này sẽ lớn khi lực bám giữa bánh xe và mặt đường lớn. 8
Hình 3.3. Ảnh hưởng c a l
ủ ực bám đến vòng tròn ma sát Kamm
Lực F được tổng hợp từ áp lực phanh FB và lực quay vòng FL (khi phanh), tương tự
ta cũng tổng hợp được lực F’ từ lực kéo FT và lực quay vòng FL (khi tăng tốc). Nếu lực
tổng hợp này làm cho điểm F nằm ngoài vòng tròn ma sát, khi đó ô tô sẽ không điều khiển được (mất k ả h năng lái).
Khi độ lớn của lực tổng hợp giữa áp lực phanh và lực quay vòng vẫn còn nằm trong
vòng tròn Kamm. Ô tô sẽ không gặp vấn đề khi thực hiện quay vòng.
Bây giờ, khi tăng áp lực phanh lên, lực quay vòng sẽ giảm dần.
Khi tổng hợp lực giữa áp lực phanh và lực quay vòng bằng với áp lực phanh (F = FB),
bánh xe sẽ bị khóa (bị trượt lết). Ô tô sẽ không thể thực hiện quay vòng nữa do không còn
lực quay vòng. Trường hợp tương tự xảy ra giữa lực kéo và lực quay vòng. Nếu lực quay
vòng bằng không và lực kéo đầu vào được sử dụng hoàn toàn (F’ = FT), lúc đó bánh xe sẽ
quay trơn (bị trượt quay).
3.2. ĐỘNG LỰC HỌC Ô TÔ KHI PHANH
Khi ô tô phanh, chỉ tiêu để đánh giá tính động lực của phanh ô tô đó là lực phanh, hay nói
chính xác là mô-men phanh. Ô tô có thể kiểm soát được lực phanh trong suốt thời gian
phanh trên mọi điều kiện mặt đường, khi đó ta nói ô tô ổn định khi phanh.
Mô-men phanh luôn tỷ lệ thuận với lực phanh. Do đó, Khi mô-men phanh tăng thì
lực phanh cũng tăng. Tuy nhiên, lực phanh không được tăng tùy ý mà phải bị giới hạn bởi
điều kiện bám giữa bánh xe với mặt đường, nghĩa là:
𝐹𝑏𝑚𝑎𝑥 = 𝐹𝜇 = 𝑍𝑎𝜇 (3.1) 9 Với:
𝐹𝑏𝑚𝑎𝑥 là lực phanh cực đại (tại điểm tiếp xúc bánh xe với mặt đường).
𝐹𝜇 là lực bám dọc giữa bánh xe với mặt đường.
𝑍𝑎 phản lực pháp tuyến tác dụng lên bánh xe.
𝜇 là hệ số bám dọc giữa bánh xe với mặt đường.
Công thức (3.1) cho thấy, khi lực phanh tăng dần đến một lúc nào đó lực phanh cực
đại 𝐹𝑏𝑚𝑎𝑥 bằng với lực bám dọc 𝐹𝜇. Khi đó, các bánh xe bắt ầ
đ u trượt lết. Khi các bánh xe
trượt lết hoàn toàn thì lập tức hệ số bám dọc 𝜇 sẽ giảm xuống giá trị 𝜇𝑚𝑖𝑛 làm cho lực
phanh cũng giảm xuống giá trị nhỏ nhất. Lúc này, người lái sẽ không còn điều khiển được
ô tô theo ý muốn, nếu các bánh xe trước bị trượt lết sẽ làm mất tính dẫn hướng còn nếu các
bánh xe sau trượt lết sẽ làm mất tính ổn định (dễ dàng bị trượt ngang khi có lực ngang nhỏ tác dụng).
Điều kiện đảm bảo phanh tối ưu
Bánh xe trượt lết dẫn đến hiệu quả phanh thấp nhất, tăng độ mòn của lốp, tăng độ trượt dọc
và ảnh hưởng xấu đến tính ổn định ngang của xe. Như vậy, phải làm sao cho quá trình
phanh diễn ra đạt hiệu quả cao nhất (phanh tối ưu)?
Thời gian phanh 𝑡𝑏, quãng đường phanh 𝑆𝑏 và gia tốc phanh 𝑗𝑏 là ba chỉ tiêu đánh giá
phanh có tối ưu hay không. Phanh tối ưu khi thời gian phanh, quãng đường phanh phải
ngắn nhất và gia tốc phanh phải đạt cực đại: 𝑡𝑏 = 𝑡𝑏𝑚𝑖𝑛, 𝑆𝑏 = 𝑆𝑏𝑚𝑖𝑛, 𝑗𝑏 = 𝑗𝑏𝑚𝑎𝑥. Để làm
được điều đó thì lực phanh giữa các bánh xe phía trước 𝐹𝑏𝑓 và phía sau 𝐹𝑏𝑟 phải thõa mãn
điều kiện sau được chứng minh trong cuốn Lý thuyết ô tô, 2010, Đặng Quý:
𝐹𝑏𝑓 = ℓ𝑟+𝜇ℎ𝑔 𝐹𝑏𝑟 (3.2) ℓ𝑓−𝜇ℎ𝑔
Trong đó: (𝑎, 𝑏, ℎ𝑔) là tọa độ trọng tâm của ô tô.
Do trong quá trình phanh, tọa độ trọng tâm (ℓ𝑓, ℓ𝑟, ℎ𝑔) và hệ số bám dọc 𝜇 luôn thay 𝐹
đổi cho nên tỷ số 𝑏𝑓
luôn thay đổi. Muốn vậy phải thay đổi được mô-men phanh sinh ra ở các cơ cấu pha 𝐹
n 𝑏h𝑟 đặt ở các bánh xe cầu trước và cầu sau. Tuy nhiên, hệ thống phanh
thông thường khó có thể làm được điều này, do khi phanh lực quán tính sẽ làm thay đổi tải 10
trọng tác dụng lên các bánh xe cầu trước và sau. Cụ thể, tải trọng tác dụng lên các bánh xe
cầu trước sẽ lớn hơn tải trọng tác dụng lên các bánh xe cầu sau, nghĩa là các bánh xe cầu
sau sẽ mất dần khả năng bám đường. Khi đó, bánh xe cầu sau sẽ bị hãm cứng và trượt lết
hoàn toàn, xe có thể bị quay ngang và có khả năng lật đổ nếu có lực ngang nhỏ tác dụng.
Vì thế, để tránh xảy ra hiện tượng này, hiện nay trên nhiều xe đã bố trí bộ điều hòa
lực phanh hoặc bộ chống hãm cứng bánh xe khi phanh. Các cơ cấu này sẽ tự động điều
chỉnh lực phanh ở các bánh xe bằng cách thay đổi quan hệ áp suất dẫn động phanh đến các
cơ cấu phanh ở cầu trước và cầu sau.
3.3. ĐỘNG HỌC VÀ ĐỘNG LỰC HỌC HỆ THỐNG LÁI
3.3.1. Động học hệ thống lá i
Khi quay vòng ô tô, chúng ta sử dụng các biện pháp sau:
- Sử dụng các bánh xe phía trước để dẫn hướng
- Sử dụng các bánh xe phía sau để dẫn hướng
- Sử dụng tất cả các bánh xe dẫn hướng
- Truyền những mô-men quay có giá trị khác nhau đến các bánh xe dẫn hướng chủ
động bên phải và trái, đồng thời sử dụng thêm phanh để hãm các bánh xe phía trong so với tâm quay vòng
Chúng ta xét một ô tô hai cầu với cầu trước là cầu dẫn hướng:
Đầu tiên, chúng ta xét động học quay vòng của xe khi bỏ qua biến dạng ngang của
các bánh xe do độ đàn hồi của lốp. Nếu không tính đến độ biến dạng ngang của lốp, thì khi
quay vòng véc tơ vận tốc chuyển động của các bánh xe sẽ trùng với mặt phẳng quay (mặt
phẳng đối xứng) của bánh xe.
Trên Hình 3.1 mô tả động học quay vòng của ô tô có hai bánh dẫn hướng ở cầu trước
khi bỏ qua biến dạng ngang của lốp. Ở trên sơ đồ: A, B là vị trí của hai trụ đứng. E là điểm
giữa của AB. 𝛿𝑓𝑟; 𝛿𝑓𝑟 là góc quay vòng của bánh xe dẫn hướng bên ngoài và bên trong so
với tâm quay vòng O. Bởi vậy góc 𝛿 sẽ là đại diện cho góc quay vòng của các bánh xe dẫn
hướng ở cầu trước. Mặt khác AC và BD song song ớ
v i trục dọc của ô tô. 11
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
346 173 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
543 272 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 593 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
605 303 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
0.9 K 460