Hệ thống cảnh báo điểm mù (BSM) | Tài liệu Môn Công nghệ kĩ thuật Ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Các điểm mù trên xe có thể ảnh hưởng đến khả năng quan sát của người lái về các phương tiện di chuyển trong vùng đó. Để giảm thiểu rủi ro va chạm, việc trang bị radar phát hiện chuyển động trên xe sẽ hỗ trợ phát hiện các tình huống va chạm tiềm ẩn. Radar ô tô là một thiết bị nhỏ được sử dụng để phát hiện tốc độ và phạm vi di chuyển của các đối tượng trong vùng lân cận của ô tô. Khi có phương tiện, người đi vào vùng điểm mù, bộ phát điên từ sẽ nhận tín hiệu và chuyển tín hiệu đến bộ xử lý bộ CPU. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
HỆ THỐNG CẢNH BÁO ĐIỂM MÙ (BSM)
1. Cấu tạo từng bộ phận 1.1.
Các radar phát hiện chuyển động 1.1.1. Chức năng
Các điểm mù trên xe có thể ảnh hưởng đến khả năng quan sát của người lái về các
phương tiện di chuyển trong vùng đó. Để giảm thiểu rủi ro va chạm, việc trang bị radar
phát hiện chuyển động trên xe sẽ hỗ trợ phát hiện các tình huống va chạm tiềm ẩn.
Radar ô tô là một thiết bị nhỏ được sử dụng để phát hiện tốc độ và phạm vi di chuyển của
các đối tượng trong vùng lân cận của ô tô. Khi có phương tiện, người đi vào vùng điểm
mù, bộ phát điên từ sẽ nhận tín hiệu và chuyển tín hiệu đến bộ xử lý bộ CPU (Nằm bên
trong hộp điều khiển hệ thống cảnh báo điểm mù (BSM) bên trái hoặc bên phải, đồng
thời kích hoạt đèn Led chỉ thị cảnh báo điểm mù ở gương chiếu hậu.
Thông qua tín hiệu từ Radar đến Moudule điều khiểu kích hoạt các hệ thống lái giúp
người giữ vững vô lăng hoặc tác động một lực đến bàn đạp phanh giúp người điều khiển
phát hiện và đập chân phanh giữ xe đi đúng làn đường hoặc giảm tốc độ trong khi chuyển
làn để tránh việc va chạm với các phương tiện khác. 1.1.2. Phân loại
Gồm 2 loại và được sử dụng cho các mục đích khác nhau:
Radar tầm ngắn (SRR) sử dụng tần số 24 GHz và được sử dụng cho các ứng dụng
quan sát có phạm vi gần như phát hiện điểm mù, hỗ trợ đỗ xe hay phát hiện các
chướng ngại vật ở cự ly gần. Các radar này cần một ăng-ten để có thể quan sát
được với góc quét lớn, tạo ra tầm nhìn quan sát rộng để đảm bảo độ chính xác tối đa.
Radar tầm dài (LRR) sử dụng tần số 77 GHz (thông thường dao động từ 76-
81GHz) cung cấp độ chính xác và độ phân giải tốt hơn so với radar tầm ngắn.
Chúng được sử dụng để đo khoảng cách và tốc độ của các phương tiện khác khi
đang di chuyển ngược hướng xe ô tô, đồng thời radar tầm dài còn giúp phát hiện
các đối tượng trong phạm vi quan sát rộng hơn. Hệ thống radar tầm xa (LRR) cung
cấp phạm vi quan sát từ 80m đến 200m hoặc lớn hơn.
1.1.3. Nguyên lí hoạt động
Radar ô tô bao gồm một máy phát và một máy thu. Máy phát có nhiệm vụ phát ra các
sóng vô tuyến đập vào một vật thể và phản xạ trở lại máy thu. Khi có xe nào tiến lại gần
trong vùng này, các sóng điện từ sẽ bị cản lại và. Dựa vào xác định được thời gian phản
hồi của sóng từ vật thể tới nhiều cảm biến khác nhau, bộ vi xử lý trung tâm sẽ tính được
vị trí của vật thể nhờ phương pháp hình học. Do đó, nếu hệ thống nhận biết được tín hiệu
hồi về không đúng. Nó sẽ cảnh báo và tính toán chính xác khoảng cách, tốc độ và hướng
của vật thể để cảnh báo cho người lái. Cảm biến radar ô tô rất nhạy khi phát hiện và định
vị các phương tiện khác, đặc biệt khi đang đi với tốc độ như trên đường cao tốc.
Hệ thống phát hiện điểm mù sẽ hoạt động khi vận tốc của xe lớn hơn 30km/h, có thể phát
hiện cùng lúc 5 vật thể chuyển động trong khu vực điểm mù.Khoảng cách phát hiện điểm
mù lên đến 25 m kể cả trong điều kiện thời tiết xấu.
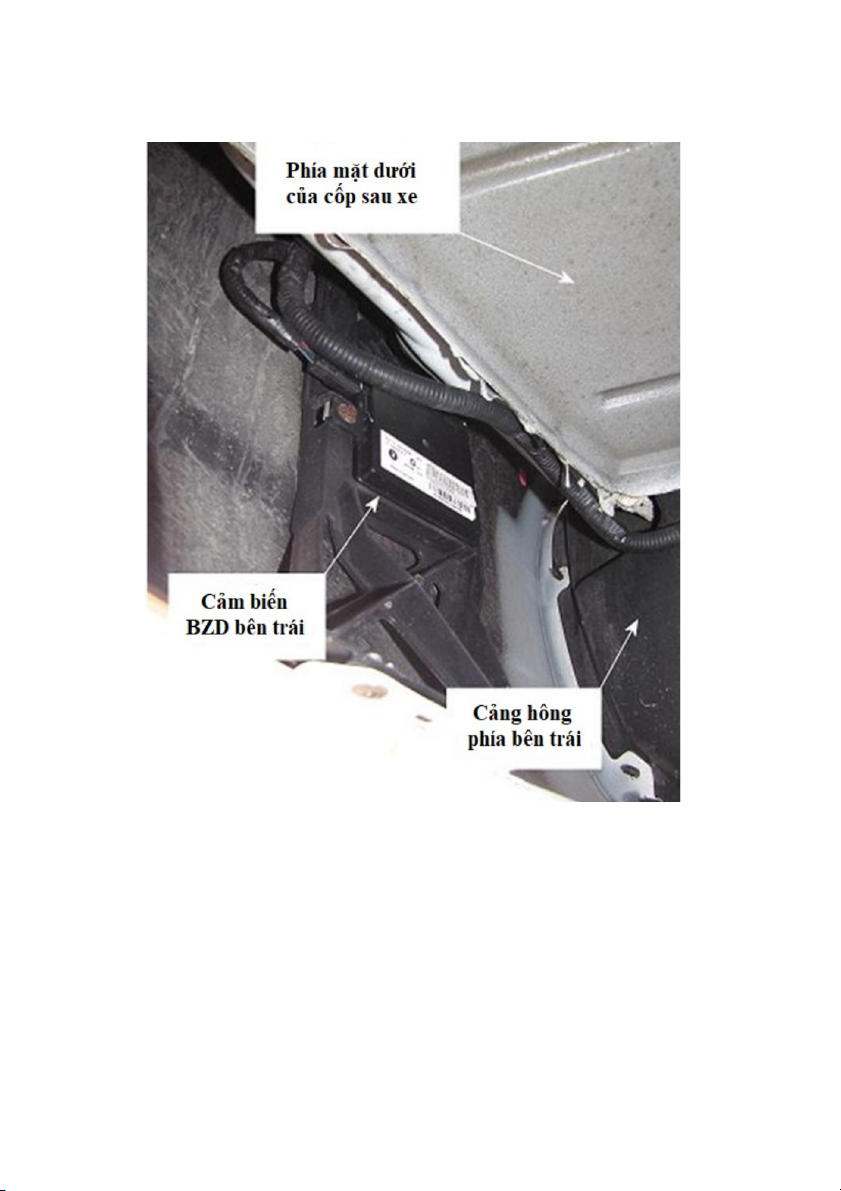
1.1.4. Vị trí lắp đặt
Gồm 2 bộ định tuyến Radar, được lắp đặt âm phía trong cản sau của ô tô. Hai bộ định
tuyến Radar được đo đạc và tính toán góc lắp đặt 130 độ, sao cho hướng sóng đảm bảo
quét chính xác trong các điều kiện thực tế... Từ đó hỗ trợ chính xác cho chủ xe, đưa ra
cảnh báo cho người sử dụng biết rằng đang có phương tiện nằm trong vùng điểm mù,
giúp chủ xe làm chủ tình huống tránh tai nạn rủi ro đáng tiếc có thể xảy ra 1.2. Camera
Trong các xe hiện đại ngày nay, thường được trang bị thêm các camera để ghi lại các
góc nhìn trong vùng điểm mù. Khi hệ thống BSM phát ra tín hiệu cảnh báo, các
camera này sẽ truyền hình ảnh chính xác lên màn hình hiển thị, giúp người lái dễ dàng
xử lý tình huống một cách hiệu quả hơn.
Các camera này thường được bố trí ở bên dưới của các gương chiếu hậu và phía sau
xe (camera lùi). Hướng camera hướng ra vùng điểm mù bên ngoài phạm vi gương
chiếu hậu có thể quét được. 1.3.
Đèn cảnh báo ở gương chiếu hậu
Đèn cảnh báo được lắp ở trên mỗi gương chiếu hậu và hiển thị biểu tượng trên mặt
gương. Đèn led này sẽ sáng mỗi khi có khả năng va chạm nếu người lái lùi xe hoặc chuyển làn:
- Khi lùi xe: Đèn sẽ cảnh báo nếu có phương tiện hoặc vật cản tiến tới gần đuôi xe
- Khi chuẩn bị chuyển làn: Đèn sẽ sáng cảnh báo nếu xe đang di chuyển với ngưỡng
tốc độ thiết lập để BSM hoạt động và có phương tiện khác di chuyển cùng chiều
với tốc độ lớn hơn và đang lưu thông ở làn kế bên 1.4. Bộ xử lí 1.4.1. Tín hiệu vào
BSM thu thập các tín hiệu gửi về từ các radar
1.4.2. Tính toán, xử lí dữ liệu
Từ các dữ liệu thu thập được liên tục, BSM sẽ phân tích các trường hợp có thể xảy ra:
Xe đang lùi và có phương tiện cắt qua, hoặc xe tiến tới gần các vật cản, chướng ngại vật
Xe đang di chuyển với tốc độ trên 30Km/h và có phương tiện làn bên cạnh sắp vượt
Xe đang di chuyển với tốc độ trên 30Km/h, bật xinhan và có xe phía sau đang di chuyển lên
Xe đã đỗ, tắt máy và có xe khác đang đánh lái và chuẩn bị đỗ bên cạnh
Với các trường hợp trên, bộ xử lí của BSM sẽ xuất tín hiệu ra để cảnh báo người lái 1.4.3. Tín hiệu ra
Các tín hiệu được truyền ra để cảnh báo người lái:
Đèn cảnh báo trên gương chiếu hậu sáng lên
Các hình ảnh từ camera được gửi lên màn hình
Ngoài ra, với các xe hiện đại, có thể có bộ rung vô lăng, các loa cảnh báo bằng âm thanh,…
2. Nguyên lí điều khiển
Để khởi động hệ thống BSM, cần khởi động xe và nhấn công tắc BSD, đèn báo
chuyển đổi sẽ sáng và hệ thống đã sẵn sàng. Hệ thống BSM chỉ hoạt động khi
Tốc độ xe dưới 10 km / h với số R.
Xe di chuyển với tốc độ 35km/h trở lên
Khi BSM hoạt động, hệ thống sẽ liên tục nhận tín hiệu từ radar gửi về, xử lí và xuất
các tín hiệu cảnh báo đến người lái nếu có khả năng xảy ra va chạm khi lùi hoặc chuyển làn 3. Vận hành, sử dụng 3.1.
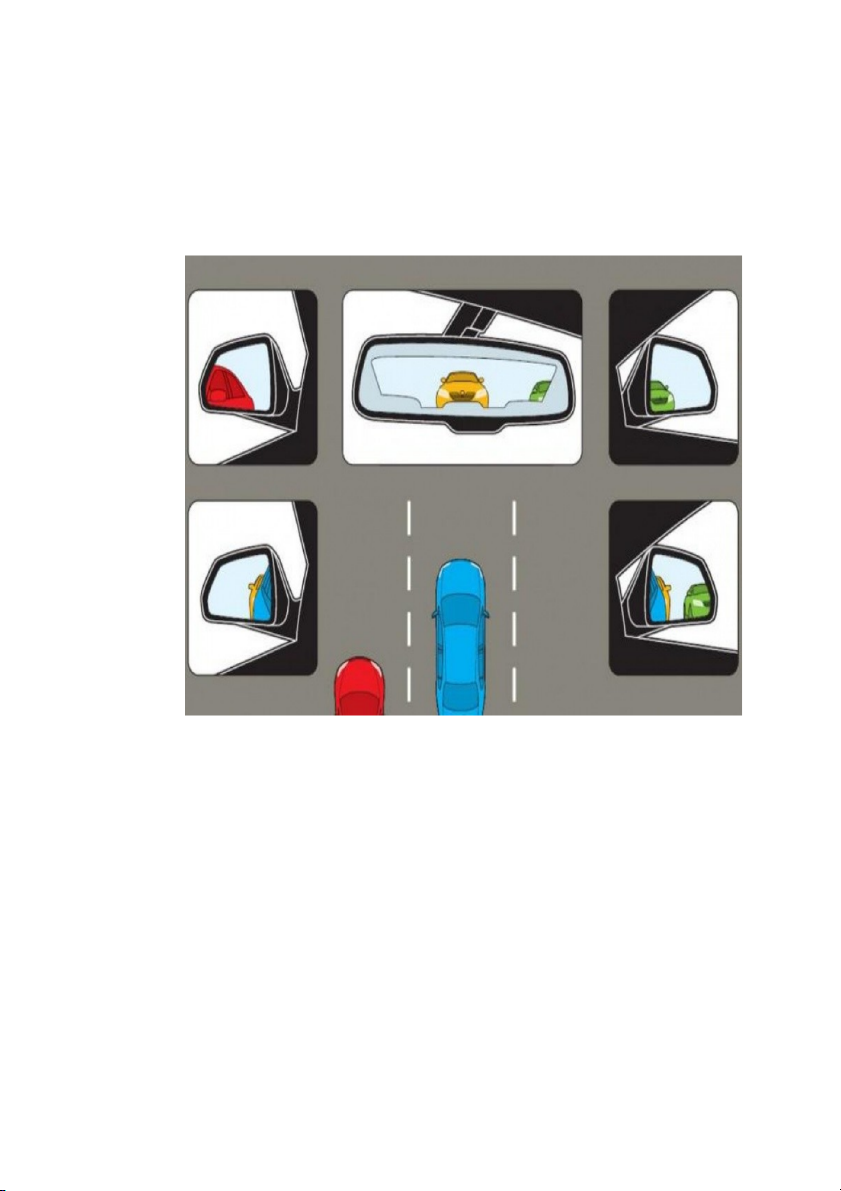
Điều chỉnh các gương cho phù hợp
Việc điều chỉnh gương sẽ giúp hạn chế tối đa nhất điểm mù của xe và cung cấp tầm
nhìn trực tiếp phía sau cho người lái.
Để hạn chế điểm mù, trước hết người lái nên căn chỉnh lại gương của chính mình, trong đó:
Gương giữa: Đặt gương chiếu hậu như bình thường. Khi bắt đầu, hãy điều
chỉnh chỗ ngồi của mình, sau đó điều chỉnh gương để có thể nhìn thấy toàn bộ
cửa sổ phía sau. Nếu ta điều chỉnh lại chỗ ngồi của mình, hãy nhớ điều chỉnh lại gương.
Gương bên trái: Đặt nó sao cho ngay khi có xe bên trái đi qua. Đèn pha phía
trước bên trái của xe đó biến mất khỏi gương chiếu hậu và xuất hiện trong
gương bên trái của xe mình.
Gương bên phải: Đặt nó ngay khi xe bên phải sắp sửa vượt qua. Đèn pha phía
trước bên trái của xe đó sẽ biến mất khỏi gương giữa và xuất hiện trong gương bên phải của mình. 3.2.
Vận hành hệ thống BSM
Để vận hành được hê thống cảnh báo điểm mù cần kết hợp với việc quan sát và điều
chỉnh gương, ta nên sử dụng hệ thống cảnh báo điêm mù một cách tối ưu. Để thực
hiện điều đó, chúng ta nên để ý đến những thông báo của hệ thống.
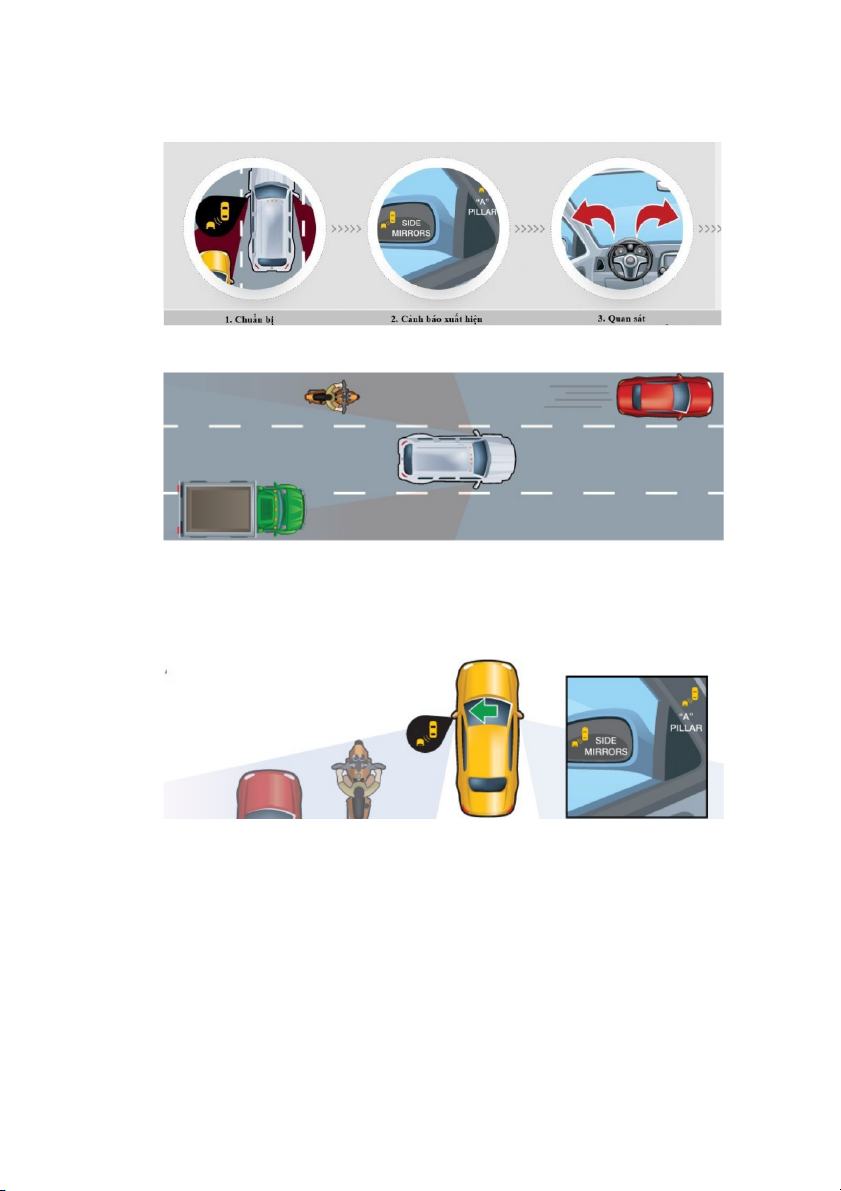
Các bước thứ tự hoạt động của cảnh báo điểm mù
- Chuẩn bị: Hệ thống theo dõi khi có phương tiện tiến vào gần điểm mù của xe. Chuẩn bị
- Cảnh báo: Các cảnh báo xuất hiện bên gương chiếu hậu, tuỳ theo có phương tiện nào
tiến vào gần khoảng mù bên trái hoặc phải thì biểu tượng sẽ nhấp nháy bên gương đó.
Nếu cả hai bên xuất hiện thì sẽ nháy cùng lúc. Ngoài các biểu tượng trên, hệ thống
cảnh báo còn nhắc người lái bằng âm thanh píp píp. Cảnh báo
- Quan sát: Khả năng xử lí tình huống của người lái rất quan trọng. Khi có xe xuất
hiện trong điểm mù, tuỳ theo từng trường hợp, người lái nên xi nhan trước khi chuyển sang làn trống. 4. Kết luận 4.1. Ưu điểm
Hệ thống cảnh báo điểm mù mang lại sự an toàn cho người lái xe khi tham gia điều
khiển phương tiện, chằng hạn như:
Người lái có khả năng dự đoán và tránh được va chạm
Giảm thiểu rủi ro xảy ra tai nạn
Ngoài việc đưa ra các cảnh báo về phương tiện trong điểm mù, hệ thống cảnh báo
BSM còn có những tính năng và ưu điểm nổi bất sau đây:
Khả năng cảnh báo phương tiện có vận tốc lớn muốn vượt qua xe của bạn. Khi
có một phương tiện nào đó nằm trong phạm vi quét có tốc độ lớn hơn tốc độ
xe của bạn, hệ thống BSM sẽ gửi về một thông báo, lúc này bạn có thể ra tín
hiệu nhường đường để xe sau vượt lên tránh va chạm không đáng có.
Hệ thống BSM có thể cảnh báo cùng lúc 5 vật chuyển động trong vùng điểm
mù. Phạm vi quét Radar 25m ngay cả trong tình trạng thời tiết xấu.
Tính năng chuyển làn đường cũng là điểm khiến người người yêu thích hệ
thống BSM. Nguyên lý hoạt động của tính năng này là quét Radar về hai bên,
và phía sau xe, giúp bạn biết được có xe nào đang chạy cùng làn với mình hay
không, từ đó giúp bạn chuyển làn an toàn. Đồng thời, khi có xe vượt lên phía
trước hệ thống sẽ đưa cảnh báo đèn led để bạn xử lý tình huống.
Khi bạn dừng xe và muốn mở cửa xe, ngay lập tức hệ thống cảnh báo mở cửa
sẽ hoạt động. Nếu trong vùng quét Radar có bất kỳ vật chuyển động gây nguy
hiểm khi mở cửa xe, hệ thống | BSM sẽ gửi ngay thông báo đến bạn. 4.2. Nhược điểm
Mọi hệ thống đều có nhược điểm. Hệ thống cảnh báo điểm mù cũng có nhiều hạn chế:
Chỉ phát hiện các phương tiện trên đường cao tốc mà không phát hiện các vật
thể khác như xe máy, xe đạp, con người.
Bị ảnh hưởng bởi thời tiết: mưa, bão, tuyết,…
Nếu tốc độ xe từ 10- 35km/h, hệ thống sẽ không thể hoạt động.
Một số hệ thống sẽ không thể phát hiện được các phương tiện có tốc độ cao hơn hoặc
thấp hơn ngưỡng tốc độ được cài đặt. 4.3. Khắc phục
Để khắc phục tình trạng trên chúng ta có một số cách phổ biến như sau:
Kiểm tra lại việc đấu dây, lắp đặt các cảm biến có đúng thứ tự, vị trí hay không
(Nếu như cản sau đã từng bị dỡ ra).
Nếu việc đấu dây, phần cứng là ok, bắt buộc phải học (relearn) và canh chỉnh
(calibration) lại hệ thống bằng phần mềm chuyên dụng tại một nơi chuyên sửa Mazda uy tín.
Trên đây là lỗi thường xảy ra phổ biến trên các dòng xe Mazda khi gặp sự cố liên
quan đến cản và hệ thống cảm biến. Hệ thống này giúp xe tránh được các tai nạn
đáng tiếc khi lùi xe hoặc di chuyển ở các tầm nhìn hạn chế. Vì thế, khi xe gặp phải
sự cố này chúng ta nên tìm ngay đến một nơi chuyên sửa Mazda uy tín để khắc
phục nhanh chóng để đảm bảo an toàn cho bản thân và mọi người. Hy vọng những
chia sẽ đến từ Viện Auto – Garage chuyên sửa Mazda sẽ giúp bạn có thêm nhiều
kiến thức về lỗi hệ thống cảnh báo điểm mù (BSM). TÀI LIỆU THAM KHẢO:
https://vinfast.vn/dien-dan/thao-luan/rada-o-to-hoat-dong-nhu-the-nao/
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445