Khai thác và sử dụng radar - Chi tiết máy | Trường Đại học Giao thông Vận Tải
Khai thác và sử dụng radar - Chi tiết máy | Trường Đại học Giao thông Vận Tải được được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Chi tiết máy (GTVT) 21 tài liệu
Trường: Trường Đại học Giao thông vận tải 487 tài liệu
Tác giả:

































































Preview text:
ĐỀ TÀI:
“KHAI THÁC VÀ SỬ DỤNG
RADAR – ARPA Furuno FR- 2805” lOMoAR cPSD| 15962736 MỤC LỤC
LỜI CẢM ƠN ......................................................................................................................................... 5
LỜI NÓI ĐẦU ........................................................................................................................................ 6
Phần A GIỚI THIỆU CHUNG ............................................................................................................ 7
Phần B KHAI THÁC ............................................................................................................................ 9
Chƣơng 1 VẬN HÀNH .................................................................................................................... 9
1.1 KHỞI ĐỘNG RADAR: ............................................................................................................. 9
1.2 PHÁT TÍN HIỆU ....................................................................................................................... 9
1.3 CẤU TẠO CHÍNH .................................................................................................................. 10
1.4 ĐIỀU CHỈNH ĐÔ SẠ́ NG MÀ N HÌNH .................................................................................... 13
1.5 ĐIỀU CHỈNH MÁY THU........................................................................................................ 13
1.6 MÀN HÌNH HIỂN THỊ .......................................................................................................... 14
1.7 ĐIỀU CHỈNH Ả NH HƢỞNG CỦ A TỪ ................................................................................... 15
1.8 ĐOC THÔNG SỘ́ HỒ I CHUYỂN BAN ĐẦ U ........................................................................ 16
1.9 LỰA CHON CẠ ́ CH THỨC THỂ HIÊṆ .................................................................................. 16
1.10 LỰA CHON ̣ THANG TẦM XA ............................................................................................ 19
1.11 LỰA CHON ĐỘ DẠ ̀ I XUNG PHÁT...................................................................................... 19
1.12 ĐIỀU CHỈNH ĐÔ NHẠ Ỵ ..................................................................................................... 20
1.13 KHỬ NHIỄU BIỂN ............................................................................................................... 21
1.14 KHỬ NHIỄU MƢA .............................................................................................................. 22
1.15 KHỬ NHIỄU GIAO THOA ................................................................................................... 23
1.16 ĐO KHOẢ NG CÁ CH TƢƠNG ỨNG ................................................................................... 24
1.17 ĐO PHƢƠNG VI TƢỢ NG ỨNG .......................................................................................... 25
1.18 DỰ ĐOÁ N VA CHAM BẶ̀ NG EBL...................................................................................... 26 lOMoAR cPSD| 15962736
1.19 ĐO PHƢƠNG VI VẠ̀ KHOẢ NG CÁ CH GIỮA HAI MUC TIÊỤ ......................................... 27
1.20 CÀI ĐẶT VÙNG BÁO ĐỘNG .............................................................................................. 27
1.21 ĐIỀU CHỈNH LÊCH TÂṂ .................................................................................................... 29
1.22 ĐỘ DÀI TÍN HIỆU DỘI LẠI ................................................................................................ 30
1.23 TRUNG BÌNH TÍN HIỆU DỘI LẠI (ECHO AVERAGING) ................................................. 31
1.24 TRỢ GIÚP VẼ TỰ ĐỘNG (EPA) .......................................................................................... 32
1.25 VẾT MỤC TIÊU................................................................................................................... 35
1.26 ĐƢỜNG PHƢƠNG VI SONG SONG̣ ( PARALLEL INDEX LINES) .................................. 37
1.27 TRỰC NEO ........................................................................................................................... 39
1.28 ĐÁNH DẤU ĐIỂM GỐ C ...................................................................................................... 41
1.29 CHỨC NĂNG PHÓ NG ĐAỊ .................................................................................................. 41
1.30 CÁC ĐÁNH DẤU ................................................................................................................. 42
1.31 DANH MỤC CÁC MENU..................................................................................................... 43
1.32 CÀI ĐẶT RADAR 1 và 2 menu ............................................................................................. 44
1.33 CÁC PHÍM CHỨC NĂNG .................................................................................................... 46
1.34 EPA MENU ........................................................................................................................... 52
1.35 CÁCH HIỂN THỊ DỮ LIÊU VẠ̀ THÔNG TIN HÀ NG HẢ I .................................................. 52
1.36 BẢN ĐỒ RADAR ................................................................................................................. 53
1.37 CHĂN TỊ́N HIÊU DỘI THỰ́ HAI .......................................................................................... 56
1.38 ĐIỀU CHỈNH ĐÔ SẠ́ NG CỦ A DỮ LIÊU MẠ̀ N HÌNH ....................................................... 56
1.39 CÀI ĐẶT THÔNG SỐ DÒNG CHẢY ................................................................................... 57
1.40 THÔNG TIN HIỂN THỊ BỔ SUNG:...................................................................................... 57 1.41
BÁO ĐỘNG ...................................................................................................................... 57
Chƣơng 2 VẬN HÀNH CHỨC NĂNG ARPA................................................................................ 59 lOMoAR cPSD| 15962736
2.1 TỔNG QUAN:......................................................................................................................... 59
2.2. CÁC PHÍM SỬ DỤNG CHO ARPA ....................................................................................... 60
2.3. VẬN HÀNH MENU ARPA .................................................................................................... 60
2.4. QUI TRÌNH KHỞI ĐỘNG ..................................................................................................... 61 2.5
TỰ ĐỘNG DÒ SÓNG: ...................................................................................................... 64 2.6
DÒ SÓNG BẰNG TAY ..................................................................................................... 67
2.7 THAY ĐỔI KÍCH THƢỚC CỦA MỤC TIÊU THEO DÕI ...................................................... 67
2.8 ĐIỀU CHỈNH ĐỘ SÁNG CỦA CÁC ĐIỂM ĐÁNH DẤU (PLOT MARKS) ........................... 69
2.9 HIỂN THỊ DỮ LIỆU MỤC TIÊU ............................................................................................ 69
2.10 CHẾ ĐỘ HIỂN THỊ VÀ CHIỀU DÀI CỦA CÁC VÉC-TƠ .................................................. 71
2.11 HIỂN THỊ VỊ TRÍ CŨ............................................................................................................ 73
2.12 CÀI ĐẶT NHỮNG VÙNG BÁO ĐỘNG CPA/TCPA ............................................................ 74
2.13 CÀI ĐẶT MỘT VÙNG CẢNH BÁO ..................................................................................... 75
2.14 CÁC CHÚ Ý .......................................................................................................................... 77
2.15 ĐIỀU ĐỘNG THỬ NGHIỆM ................................................................................................ 78
2.16 KIỂM TRA CHỨC NĂNG THEO DÕI ARPA (ARPA track test) .......................................... 80
2.17 CÁC TIÊU CHUẨN LỰA CHỌN CÁC MỤC TIÊU THEO DÕI .......................................... 81
Chƣơng 3 KHẢ NĂNG QUAN SÁT CỦA RADAR ....................................................................... 82
3.1 THANG TẦM XA CỰ ĐẠI VÀ THANG TẦM XA CỰC TIỂU ............................................. 82
3.2 LỖI TÍN HIỆU DỘI LẠI: ........................................................................................................ 84
3.3 SART (Search and Rescue Transponder) .................................................................................. 85 3.4
RACON (Radar Beacon) .......................................................................................................... 86
Chƣơng 4 BẢO DƢỠNG ................................................................................................................. 87
Chƣơng 5 SỰ CỐ ............................................................................................................................. 89 lOMoAR cPSD| 15962736
5.1 SỰ CỐ ĐƠN GIẢN ................................................................................................................. 89
5.2 CÁC SỰ CỐ CAO HƠN ......................................................................................................... 90
5.3 CHUẨN ĐOÁN LỖI ............................................................................................................... 91
KẾT LUẬN............................................................................................................................................. 93 lOMoAR cPSD| 15962736 LỜI CẢM ƠN ------- -------
Sau thời gian nghiên cứu, học tập tại trƣờng Đại Học Giao Thông Vận Tải
TP.HCM, với sự quan tâm, dạy dỗ và chỉ bảo tận tình chu áo của Thầy Cô và các bạn
bè, em ã hoàn thành luận văn với ề tài: “khai thác sử dụng RADAR-ARPA Furuno FR-2805”.
Để có ƣợc kết quả này, em xin ặc biệt gửi lời cảm ơn chân thành ến thầy Nguyễn
Xuân Thành, ã quan tâm giúp ỡ, vạch hƣớng dẫn cho em hoàn thành tốt nhất luận
văn tốt nghiệp trong thời gian qua.
Với thời gian có hạn và kinh nghiệm hạn chế của một sinh viên nên không tránh
khỏi những thiếu sót. Em rất mong ƣợc sự chỉ bảo, góp ý ể em có thể hoàn chỉnh hơn.
Một lần nữa, em xin chân thành cảm ơn! Thành Phố Hồ Chí Minh Tháng 6 năm 2011 LỜI NÓI ĐẦU lOMoAR cPSD| 15962736
Vận tải ƣờng biển rất phổ biến ở nƣớc ta và thế giới. Nó phát triển ngày càng mạnh
mẽ và óng vai trò vô cùng quan trọng. Trong một vài năm gần ây, nƣớc ta rất chú trọng vào
việc phát triển ƣờng biển, ặc biệt là sự xuất hiện rất nhiều ội tàu biển hiện ại và mới mẻ,
và sự trang bị những thiết bị hiện ại làm cho việc hành hải dễ dàng và thuận tiện hơn. Trong
ó, Radar hàng hải là thiết bị không thể thiếu cho tất cả các con tàu hành trình vƣợt ại dƣơng
cũng nhƣ gần bờ. Nó ƣợc ví nhƣ là con mắt cho ngƣời i biển, nhờ radar mà ta có thể hành
hải an toàn trong thời tiết xấu, tầm nhìn xa hạn chế, phát hiện các mục tiêu ở xa ể biết cách iều ộng an toàn.
Radar là một thiết bị rất quan trọng cho ngƣời hành hải, radar cũng phải ảm bảo các
ặc tính tiêu chuẩn theo yêu cầu của IMO. Radar phải ảm bảo yêu cầu khai thác trong iều
kiện bình thƣờng, cung cấp ảnh vị trí các phƣơng tiện nổi, chƣớng ngại vật, phao tiêu,
ƣờng bờ… cũng nhƣ các dấu hiệu hàng hải khác ể ịnh vị, dẫn tàu và tránh va. Chúng ta
cũng không thể dựa vào hoàn toàn vào radar, bởi vì radar chỉ là một thiết bị do con ngƣời
iều khiển và chỉ trợ giúp cho ngƣời hành hải an toàn.
Thực tế hiện nay tài liệu khai thác các máy radar bằng tiếng Việt rất ít, a số là tài liệu
tiếng Anh cho nên em tin rằng bài luận văn của mình là tài liệu tốt phục vụ công tác học tập
của sinh viên các khóa sau và em hi vọng là sản phẩm ứng dụng thực tiễn cho các ội tàu Việt Nam và Châu Á. Phần A GIỚI THIỆU CHUNG
Radar là phƣơng tiện vô tuyến iện dùng ể phát hiện và xác ịnh vị trí của mục tiêu
so với trạm radar. Vì vậy radar ƣợc sử dụng rộng rãi trong cả lĩnh vực quân sự và giao
thông. Đặc biệt là ngành ƣờng biển và ƣờng không.
Thuật ngữ RADAR là viết tắc của Radio Detection And Ranging, tức là dùng sóng vô
tuyến ể xác ịnh phƣơng vị và khoảng cách tới mục tiêu. lOMoAR cPSD| 15962736
Radar FR 2805 là kết quả của sự kết hợp của các ặc tính các máy FURUNO trƣớc ó và
sự tiến bộ của kỹ thuật máy tính. Nó ƣợc thiết kế ầy ủ phù hợp một cách chính xác của các
qui ịnh của IMO cho tất cả các loại tàu.
◼ Màn hình hiển thị có ộ phân giải cao 28’ inch. Nó cung cấp hình ảnh hiển thị dữ liệu
trên màn hình ƣờng kính 360mm có cả số và chữ.
◼ Trên màn hình dữ liệu hiễn thị bao gồm CPA,TCPA, khoảng cách, phƣơng vị, tốc ộ
hƣớng i của tàu mình và trên 3 mục tiêu. Chức năng ARPA có thu ƣợc tới 20 mục
tiêu tự ộng hoặc 40 mục tiêu bằng tay. Thêm vào ó, nét ặc biệt của màn hình hiển
thị ARPA có thêm hệ thống phân luồng giao thông, phát hiện các phao, iểm nguy
hiểm và những iểm ánh dấu quan trọng.
◼ Tính năng tổng quát :
◼ Màn hình ộ phân giải cao 28’ inch.
◼ Bàn phím dễ sử dụng và ƣợc thiết kế trên radar.
◼ Cảnh báo mục tiêu trong vùng cảnh báo.
◼ Đánh dấu 10 mục tiêu bằng các ký hiệu khác nhau (khi chế ộ ARPA chƣa ƣợc kích hoạt).
◼ Vết mục tiêu theo dõi tốc ộ và hƣớng i mục tiêu nhờ vào các vết lƣu lại.
◼ Tăng khả năng nhận dạng mục tiêu bằng cách hiệu chỉnh các nút Echo average, Echo stretch, IR ... ◼ Tính năng ARPA :
◼ Thu ƣợc 20 mục tiêu tự ộng và 20 mục tiêu bằng tay, thu ƣợc 40 mục tiêu nếu thu bằng tay.
◼ Theo dõi hƣớng di chuyển của các mục tiêu bằng các vecto tƣơng ối hoặc vecto thật.
◼ Kẻ các ƣờng hành hải, thêm vào các biểu tƣợng phục vụ cho mục ích hành hải. lOMoAR cPSD| 15962736
◼ Cung cấp các thông tin về phƣơng vị, khoảng cách, hƣớng i, tốc ộ, CPA, TCPA,
BCT, BCR của 2 mục tiêu trong số các mục tiêu quan trắc.
◼ Báo ộng trong các trƣờng hợp mục tiêu biến mất, mục tiêu ang i vào vùng CPA/
TCPA giới hạn, máy có lỗi, … Phần B KHAI THÁC
Chương 1 VẬN HÀNH
1.1 KHỞI ĐỘNG RADAR:
• Nút POWER ƣợc ặt tại góc phải phía dƣới của màn hình . Nhấn nút nà y ể bât ̣
hoăc nhấn lần n ữa ệ ̉ tắt radar . Màn hình hiển thị ƣờng tròn phƣơng vị và ồng hồ
iện tử sau khoảng 15 giây sau khi bât POWEṚ . Đồng hồ ếm giảm dần 3 phút cho
thời gian ốt nóng. Khoảng thời gian ể làm nóng èn MAGNETRON hoặc ống tia
iện tử là thời gian chuẩn bị phát. Khi thời gian a ến ̃ 0:00; dòng chữ STBY xuất
hiên lụ ́c này radar a sẵ ̃n sàng phát tín hiệu. lOMoAR cPSD| 15962736 CÔNG T Ắ C NGU Ồ N
• Trong iều kiêṇ èn ã ủ nóng và a sẵ ̃n sàng , bạn sẽ nhìn thấy xuất hiện một thông
báo BRG SIG MISSING . Sự việc này hoàn toàn bình thƣờng bởi vì tín hiệu lúc
này không ƣợc phát , khi anten chƣa quay. Giá trị ON TIME và TX TIME
ƣơc thệ ̉ hiên tạ i phị a dƣớ ́i màn hinh̀ là thời gian ƣơc ếm trong số giợ ̀ và 1/10
của giờ khi radar ã ƣợc bật và phát . 1.2 PHÁT TÍN HIỆU
Khi tình trạng STANDBY kết thúc trên màn hình, nhấn ST-BY/TX trên bảng iều
khiển chế ộ phát sẽ ƣợc bật lên.
Tầm xa và xung phát của radar có giá trị và chế ộ phát nhƣ trƣớc ó. Một số cài ặt khác
nhƣ: ộ sáng, các vòng cự li di ộng, các vòng phƣơng vị iện tử và các lựa chọn trong mục
Menu cũng sẽ ƣợc ặt nhƣ những cài ặt trƣớc ó.
Có thể bật tắt qua lại giữa chế ộ STANDBY và TRANSMIT. Anten quay khi phát và
ngừng quay khi ở chế ộ STANDBY. CHÚ Ý:
1. Nếu anten không quay trong chế ộ phát, thì kiểm tra công tắt anten trong bộ phận iều
chỉnh có ở chế ộ OFF hay không.
2. Tuổi thọ của èn Magnetron là kết quả của việc giảm bớt công suất nguồn.
Khởi ộng nhanh: Với iều kiện miễn là radar ã ƣợc sử dụng trƣớc ó mà ống phát ( èn
magnetron) vẫn còn ấm, thì ta có thể bật chế ộ phát không cần 3 phút STANDBY. Nếu công
tắt POWER ang ở chế ộ tắt bỡi lỗi hoặc giống nhƣ vậy mà bạn muốn bật nhanh radar, thì bạn theo các bƣớc sau:
• Bật công tắt POWER không ít hơn 5 giây sau khi tắt.
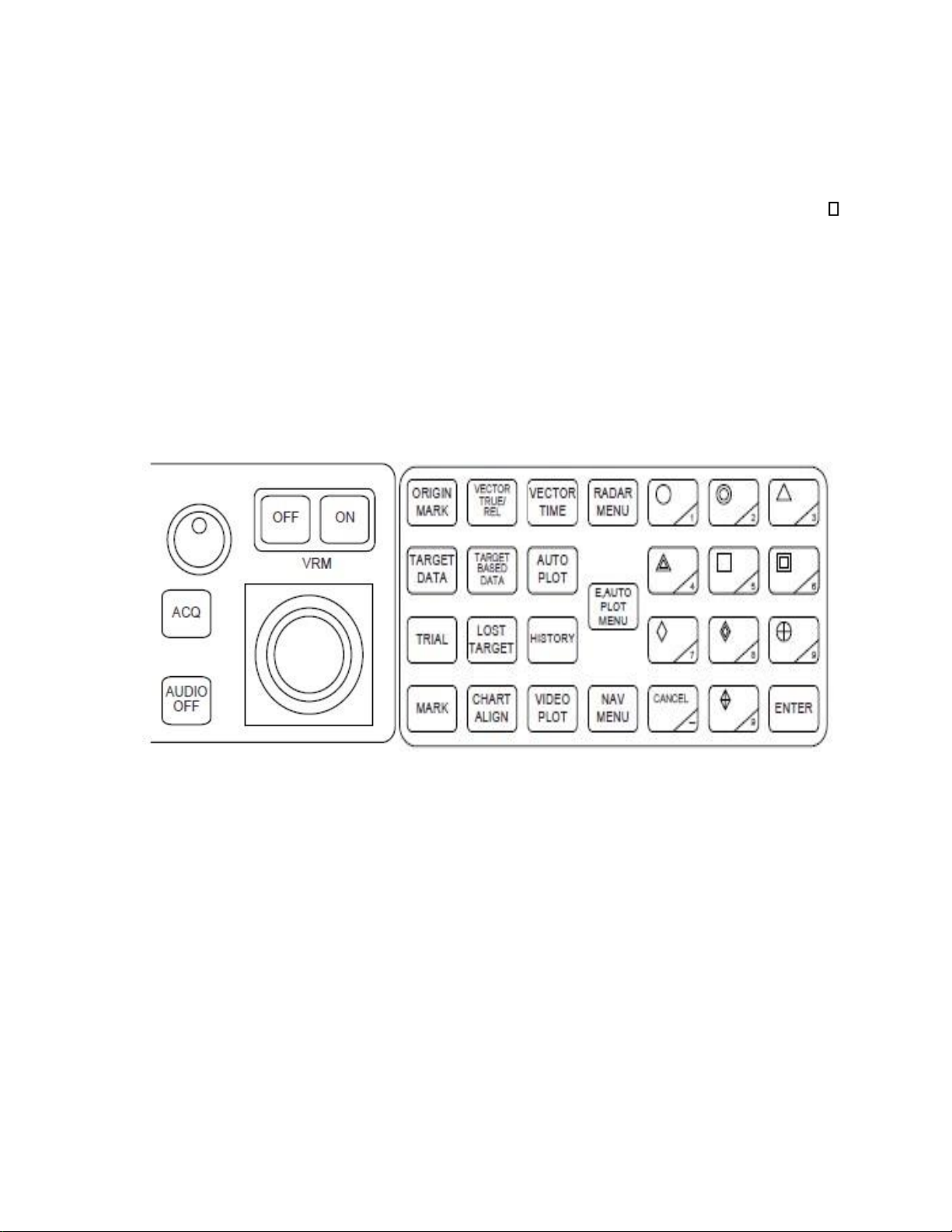
• Nhấn công tắt ST-BY trong bộ iều chỉnh. • Nhấn STBY/TX ể phát. lOMoAR cPSD| 15962736 1.3 CẤU TẠO CHÍNH lOMoAR cPSD| 15962736 lOMoAR cPSD| 15962736
1.4 ĐIỀU CHỈNH ĐÔ SẠ́ NG MÀ N HÌNH
• Điều khiển BRILL trên bảng iều khiển ể
thay ổi ộ sáng của toàn bộ màn hình .
• Chú ý : iều khiển thay ổi sao cho p hù hơp vợ ́i iều kiên sạ ́ng , ăc biệ t lạ
̀ giƣ̃a thời gian ban ngà y và ban êm.
• Chú ý: nên iều chinh ổ sạ
́ng màn hinh trƣờ ́c khi iều chỉnh ca ́c nút
liên quan . Và trƣớc khi bât vạ ̀ tắt màn hinh nêǹ
ể ộ sáng ở giá trị nhỏ nhất.
1.5 ĐIỀU CHỈNH MÁY THU
ĐIỀU CHỈNH TƢ ĐỘNG̣.
• Máy thu radar ƣ ợc tự ộng iều chỉnh liên tục khi radar ƣợc bật, vì thế không có ô
iều khiển phía trƣớc cho muc ị ch iều chí nh̉ .
• Nếu dòng chữ AUTO TUNE không thể hiêṇ , kiểm tra rằng TUNE trong phần iều
khiển ở chế ô AUTỌ (tự ộng) chƣa. CHỈNH BẰ NG TAY.
• Nếu chế ô iều chị nh tƣ̉ ộ
ng không ạ ́p ƣ́ng yêu cầu , dƣới ây là các
bƣớc iều chỉnh máy thu bằng tay :
1. Lƣa chọ n TUNE trong ô iều ̣
khiển sau ó ch ọn MAN ể ch ọn chế
ô iều chị nh bằng taỷ .
2. Đẩy nút TUNE ể bậ t nó lên.
3. Trong khi quan sát hinh à ̉nh trên thang tầm xa 48 dăm iều chị nh chẩ m nụ
́t TUNE và tìm iểm iều chỉnh tốt nhất .
4. Điều chinh TUNE ến AUTO vả ̀ ơi khoạ
̉ng 10 giây hoặc 4 vòng quét qua.
5. Đảm bảo rằng radar a ƣỡ c chọ n iệ ̉ m iều chinh tốt nhất ̉ .
6. Đẩy nút TUNE theo hƣớng thụt vào . lOMoAR cPSD| 15962736
1.6 MÀN HÌNH HIỂN THỊ lOMoAR cPSD| 15962736
1.7 ĐIỀU CHỈNH Ả NH HƢỞ NG CỦ A TƢ̀ Mỗi khi bât radaṛ
, vòng dải từ tự ộng iều chỉnh màn hình loại ra màu sắc bị nhiễu mà nguyên nhân
bởi tƣ̀ tính của trái ất hoặc
của chính cấu trúc tàu. Màn hình cũng tự ộng
iều chinh dả ̉i tƣ̀ khi tàu a ̃
ƣơc ặ t mộ t iệ ̉m chuyển
hƣớng quan trong ̣ . Trong
khi dải tƣ̀ thay ổi , màn
hình có thể bị rối loạn tạm thờ i với các ƣờng thẳng ứng. Nếu ban muốn iều chị nh dả ̉i
tƣ̀ bằng tay tai mộ t thợ ̀i iểm bất kỳ , mở và nhấn phim DEGAUSŚ . lOMoAR cPSD| 15962736
1.8 ĐOC THÔNG SỘ́ HỒ I CHUYỂ N BAN ĐẦ U
• Với iều kiên ạ ƣỡ c kết nối vợ ́i môt la bạ ̀n con quay , hƣớng mũi tàu ƣợc thể hiên
ợ ̉ phia trên cú ̉a màn hinh̀ . Vào lúc bật radar, sắp xếp trên màn hinh ò c thông ̣ số
hồi chuyển với số oc trên la bạ ̀n con quay bởi thủ tuc ạ thễ ̉ hiên bên dƣợ ́i . Cài ăt
chị nh xá ́c ban ầu , thì không òi hỏi luôn luôn phải iều chinh̉ .
• Dù sao i nữa , nếu thiết bi hồi chuyệ ̉n hoat ộ ng sai vị mồ t lỵ ́ do nào ó
, lăp lạ i ̣ thủ tục ể sửa nó.
1. Mở phần iều khiển và nhấn vào núm HOLD . Đèn Gyro LED sáng lên.
2. Nhấn núm UP ho ặc DOWN ể tăng hoặc giảm chỉ số la bàn con quay trên màn hình hồi
chuyển , mƣ́c ô thay ộ ̉i chi số m̉
ỗi lần ấn là 0.1 ộ, nhấn giƣ̃ núm UP hoăc ̣ DOWN
khoảng hơn 2 giây ể thay ổi nhanh chi số̉ .
3. Nhấn núm HOLD ến khi chỉ số trên màn hinh hồi chuyề ̉n trùng với chi số trên la ̉ bàn
con quay . Đèn Gyro LED tắt.
1.9 LƢA CHỌN CẠ́ CH THƢ́ C THỂ HIÊṆ
• Ấn phím M ODE trên phần iều khiển,
mỗi lần ấn phim MODÉ , cách thức
thể hiện và dấu hiệu tại góc trái phía trên màn hình thay ổi .
MẤ T TÍN HIÊU LA BẠ̀ N
Khi tin hiế u la bạ ̀n bi mấṭ , cách thức thể hiện tự ộng trở thành hƣớng mũi tàu và thông
số la bàn tai phị a trên má ̀n hinh hiề n cạ ́c dấu sao (*** ). Thông báo SET HEADING xuấ
t hiên tạ i gọ ́c dƣới bên trái màn hinh̀ .
Thông báo này dƣ̀ng lai ợ ̉ trên khi tin hiế
u la bạ ̀n ƣơc khôi phụ c ̣ . Nhấn phim MODE ế ̉ lƣa chọ
n cạ ́ch thƣ́c thể hiên khạ ́c (lúc này các dấu sao ã
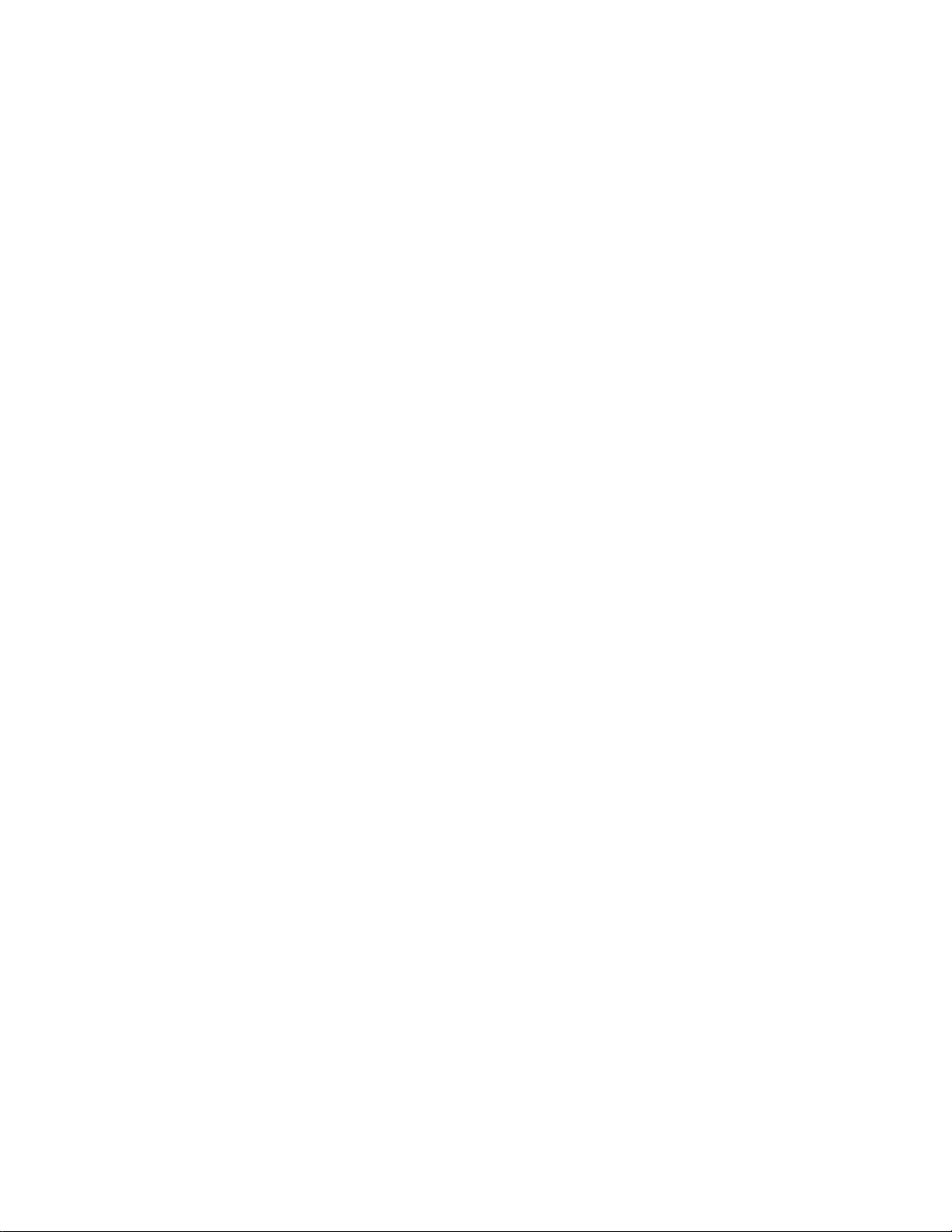
ƣợc xoá ), nhấn phim CENCEL ́ ể xoá thông báo SET HEADING . 1. HEAD-UP. lOMoAR cPSD| 15962736
Các tín hiệu mục tiêu ƣợc thể hiện tại các khoảng cách tƣơng ứng của chúng và trong
hƣớng của chúng so với hƣớng mũi tàu .
Đƣờng ngắn trên vòng phƣơng vị là iểm
bắc la ba n , mô t sai số của thiết bi hồi
chuyê n ƣa va o sẽ làm mất hƣớng bắc la
bàn và màn hình hồi chuyển hiện các dấu
sao va thông ba o SET HEADING xuất hiê n trên ma n hi nh . 2 . COURSE-UP .
Thê hiê n hƣơ ng a ă t ( chỉ tên , phía trƣớc mũi
t àu chỉ khi lựa chọn này ã ƣợc thực hiện trƣơ c o ) .
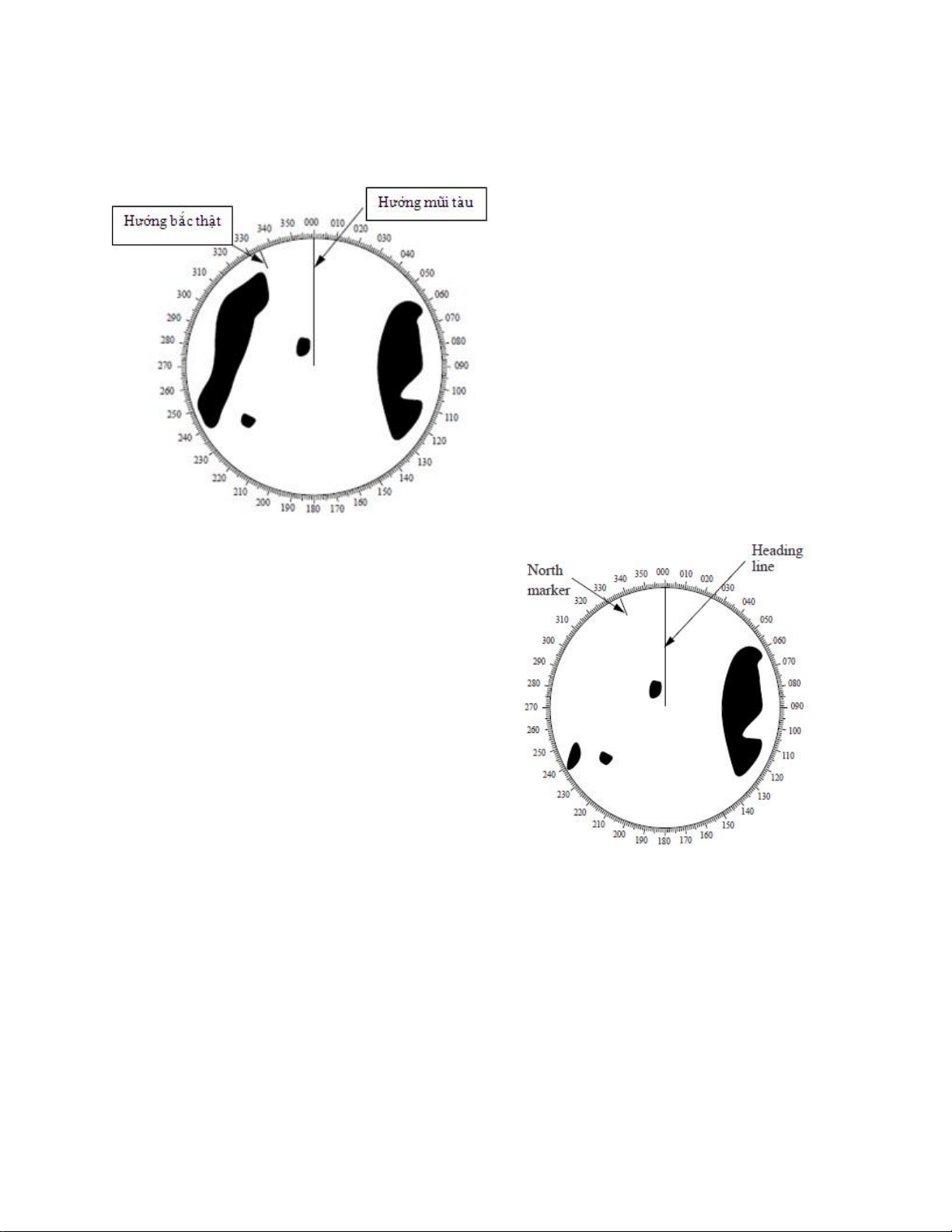
Heading line: hƣớng mũi tàu
North marker: hƣớ ng b ắ c th ậ t
Các tín hiệu của mục tiêu ƣợc thể hiện tại
khoảng cách tƣơng ứng và trong hƣớng của
chúng so với hƣớng ã ặt . Đƣợc duy trì tại vị
trí 000 trong khi hƣơ ng mu i ta u di chuyê n phu hơ p vơ ̀ ̀ ́ ̀ ̀ lOMoAR cPSD| 15962736 ́ ̃ ́ ́ ́ ̃ ̀ ̀
́i ƣờng lêch cụ̉a tàu và hƣớng thay
ổi. Lựa chọn này có ý nghĩa loại trừ các hình ảnh xấu trong quá trình thay ổi hƣớng
, sau khi thay ổi hƣ ớng, nhấn phim ́
(CU,TM RESET ) ể lựa chọn hình ảnh
ịnh hƣớng , nếu muốn sƣ̉ dung hƣợ ́ng hiên tạ ị .
3. HEAD-UP TB (TRUE BEARING) Nhƣ̃ng tin hiế u dộ i về radar ƣợ
c thệ ̉ hiên giống nhƣ trong ̣ lựa
chọn hƣớng mũi tàu. Sự khác biệt từ hƣớng
mũi tàu bình thƣờng ƣa ra nhƣ̃ng vi trị í
nh hƣ̣ ớng của vòng phƣơng vị
. Vòng phƣơng vị là la bàn ã ổn ịnh , ó là nó
xoay cùng với tín hiệu la bàn, giúp ta nhận
biết ƣợc sự lệch hƣớng của mũi tàu.
Lƣa chọn nạ̀y chỉ sƣ̉ dung khi radar ƣợc kết nối vợ́i 1 la bàn con quay . 4. NORTH-UP. lOMoAR cPSD| 15962736
Khi lƣa chọ n North –̣ up, tiếng bíp tín hiệu ƣợc thể hiện tại khoảng cách o tƣơng ứng của
chúng và hƣớng la bàn thật theo phƣơng từ tàu , hƣớng bắc thật ƣợc duy trì trên màn hình.
Dấu mũi tàu thay ổi nó ƣơc iều khiệ ̉n theo hƣớng tàu.
Nếu la bàn con quay lỗi, lƣa chọ n hiệ ̉n thi thay ̣
ổi ến head – up và dấu hƣớng bắc se biến mất̃ .
Và màn hình hồi chuyển hiển thị các dấu sao ***
và nhận ƣợc thông báo SET HEADING xuất hiên
ợ ̉ góc trái của màn hinh̀ . 5. TRUE MOTION.
- Tàu và các mục tiêu khác di chuyển phù hợp với hƣớng thật và vận tốc của chúng .
Tất cả nhƣ̃ng muc tiêu cố ị nh cụ ̃ng nhƣ muc tiêu bợ ̀ xuất hiên ợ ̉ một chỗ. lOMoAR cPSD| 15962736 ̀ ̃
Khi ta u i ến nhƣ ng iê m tƣơng ƣ ng ́
75 % của bán kính màn hình hiển thị
tàu sẽ tự ộng cài ặt iểm 50% c ủ a
bán kính. Nhƣ hình dƣới ây: lOMoAR cPSD| 15962736
1.10 LƢA CHỌN THANG TẦM XẠ
• Thang khoảng cách ƣơc thay ộ ̉i tro ng 13 nấc trên kiểu R (trên kiểu của IMO là 11
nấc) bằng cách nhấn phim ́ (+) và (-). Thang tầm xa và vòng cƣ ly cố ị nh ƣợ c ̣
hiển thi trên gọ ́c trái của màn hinh̀ .
• Thang tầm xa có thể ƣơc ̣ nới rộng 75% (100% trong R-type) ở mọi hƣớng bằng
cách sử dụng phím iều khiển lệch tâm (OFF-CENTER).
1.11 LƢA CHỌN ĐỘ DẠ̀ I XUNG PHÁT
• Độ dài xung phát trong khi sử dụng ƣợc thể hiện tại iểm phía trên bên trái màn hình
• Các ộ dài xung thích hợp ƣợc cài ặt tro ng các thang tầm xa riêng biêt vạ ̀ các phím
chƣ́c năng . Vì thế không cần luôn luôn phải lựa chọn chúng . Nếu ban không ̣ thoả
mãn với ộ dài xung lựa chọn hiện tại .Tuy nhiên có thể thay ổi chúng bằng menu của radar thao tác nhƣ s au:
• Có thể chọn ộ dài xung 1 hoăc ̣ 2 trên các cƣ ly ̣ 0,5 ến 24 hải lý trên dải X -band
(0.75 ến 24 hải lý trên dải S -band). • Lƣa chọ n ộ dạ ̀i xung 1 hoăc ̣ 2: lOMoAR cPSD| 15962736
1. Nhấn phim menu trên bá ̀n
phím ể thể hiện chức năng .
2. Nhấn phim ́ [1] ể lƣa chọ n ̣ menu muc ̣ 1 PULSEWIDTH.
3. Nhấn phim ́ [1] lƣa chọ n ̣ PULSEWIDTH 1 hoăc ̣ 2 cho thích hợp. 4. Nhấn phim ENTER ế ̉
lƣa ̣ chọn quyết ịnh của bạn .Sau ó óng menu FUNCTIONS bằng phim ́ MENU
1.12 ĐIỀU CHỈNH ĐÔ NHẠỴ
• Núm GAIN ƣợc sử dụ ng ể iều chinh ổ nhạ y khi nhậ n tị n hiế ụ , do ó cƣờng ô phạ ̉n
hồi của chúng se ƣỡ c xuất hiệ n trên mạ ̀n hinh̀ . Nó có thể khử những vết lốm ốm trên màn hinh̀ .
Để thành thạo với việc iều chỉnh GAIN, cố gắng vặn theo chiều kim ồng hồ và ngƣợc
lại ể chọn vị trí phù hợp trên màn hình radar trong khi ta quan sát. Bạn sẽ nhận ra rằng
vặn theo chiều kim ồng hồ nhiễu sẽ tăng lên.
1.13 KHƢ̉ NHIỄU BIỂ N
• Trong iều kiên thợ ̀i tiết xấu do bề măt biệ
̉n gây ra nhiêu xung quañ h tàu và che lấp các muc tiêụ .Trong tinh trà lOMoAR cPSD| 15962736
ng nạ ̀y ta có thể iều chinh bằng cả ́ch sƣ̉ dung nụ ́m A/C SEA.
• Khử nhiễu biển tự ộng:
Nhấn A/C AUTO. Sử dụng chức năng này là một phƣơng pháp tốt làm giảm bớt nhiễu biển.
Khử nhiễu bằng tay :
Xoay núm A/C SEA theo chiều kim ồng hồ hoặc ngƣợc chiều kim ồng hồ quan sát trên
màn hình khi nào hết nhiễu thì dừng lại. lOMoAR cPSD| 15962736 1.14 KHƢ̉ NHIỄU MƢA
• Trong iều kiên thợ ̀i tiết bất lơị : mây, mƣa, tuyết và sƣơng mù . Trong trƣờng hơp ̣
này có thể sử d ụng phím chức năng ể khử nhiễu . Sƣ̉ dung nụ ́m A /C RAIN trên bảng iều khiển chính .
• Ngoài ra có thể chọn khử nhiễu tự ộng bằng cách nhấn phím A /C AUTO . •
Tuy nhiên khi chon iều chị nh tƣ̉ ộ ng cọ ́
thể làm mất tin hiế u cụ ̉a các mục tiêu yếu. lOMoAR cPSD| 15962736
1.15 KHƢ̉ NHIỄU GIAO THOA • Khi tàu hoat ộ ng trong khu vƣ̣ c ông tạ
̀u bè , hoăc khi cọ ́ môt tạ
̀u khác có sƣ̉ dung ̣ radar ang hoat ộ
ng vợ ́i tần số trùng với tần số của tàu ta
. Trên màn hinh thu ̀ ƣợc tín hiệu giao thoa giữa hai sóng và gây nhiễu cho màn hình .
• Tuy nhiên loai nhiệ u nã ̀y rất dê nhẫ n rạ . Vì khi có nhiễu này màn hình có dạng nhƣ sau.
• Có 3 cấp ô khƣ̣ ̉ nhi ễu giao thoa tuỳ theo trên số các sƣ chuyệ ̉n giao c ó sự tƣơng quan lân nhaũ .
• Các cấp ộ này ƣợc chỉ thị bằng các ghi chú IR 1; IR2 ; IR3 tại phía trên bên trái màn hình.
• Nhấn phim INT REJECT ́ ể khởi ộng mạch khử nhi ễu giao thoa. Nhấn liên tiếp
phím này sẽ làm tăng tác dụng khƣ̉ nhiễu, lên ến cấp ô ̣ 3, lần nhấn thƣ́ 4 sẽ tắt chƣ́c
năng khƣ̉ nhi ễu. Tắt chế ô khƣ̣ ̉ nhi ễu giao thoa khi không có nhi ễu ; nếu không
tin hiế u cụ ̉a các muc tiêu yếu cọ ́ thể bi mấṭ .
• Chú ý : Nhằm muc ị ch nhấ n dạ ng ộ ̉n inḥ
của các kiểu RACON hoặc SART a ƣỡ c
quy ị nh bợ ̉i SOLAS 1974 cũng nhƣ a ƣỡ
c bộ ̉ sung năm 1988 (GMDSS ), SOLAS
a ề nghĩ tắt chế ộ khƣ̣ ̉ nhiêu giao thoã . lOMoAR cPSD| 15962736
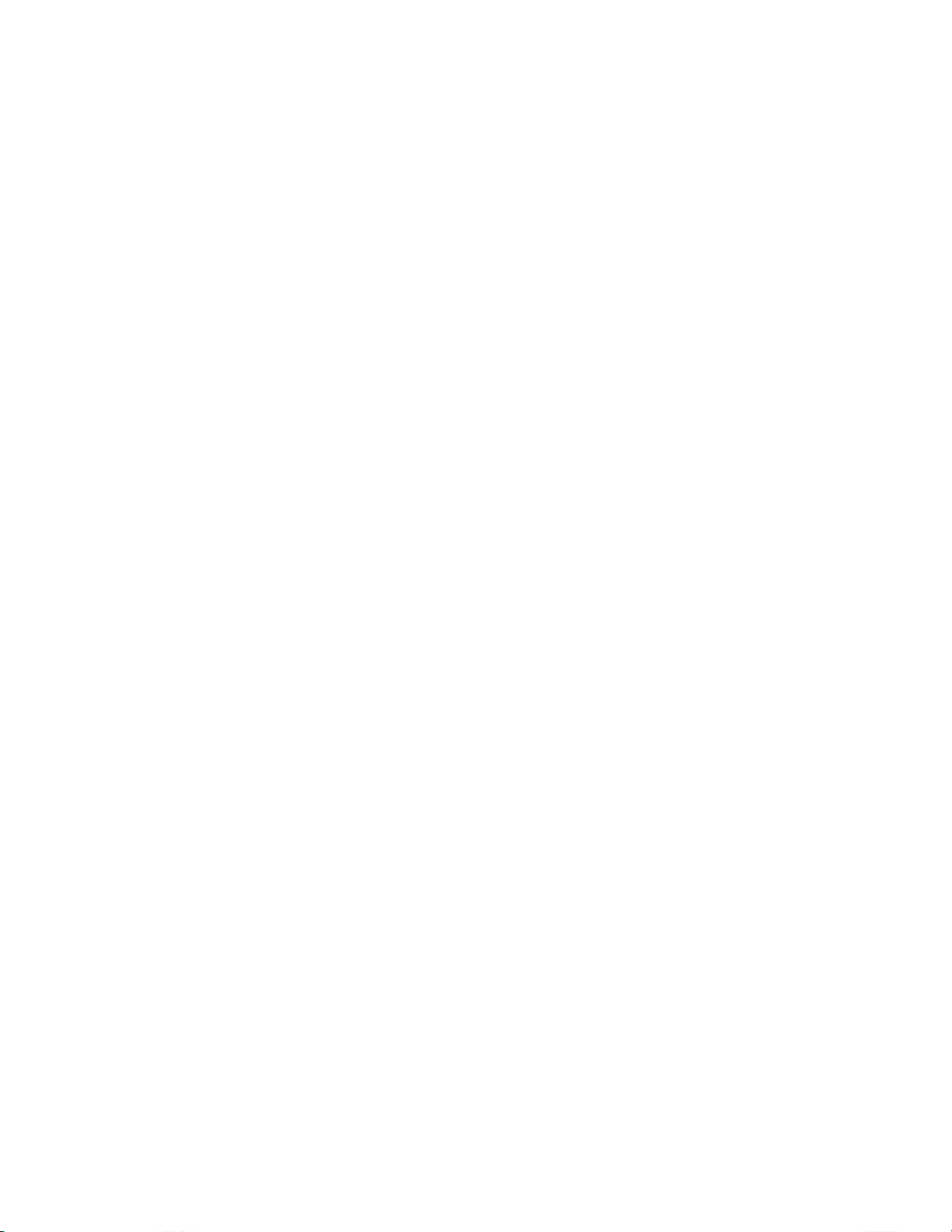
1.16 ĐO KHOẢ NG CÁ CH TƢƠNG Ƣ́ NG
• Sƣ̉ dung vọ ̀ng cƣ ly cố ị nh ệ ̉ xác inh khoạ ̉ng cách tới muc tiêụ . Chúng là các
vòng tròn ồng tâm có tâm là vị trí tàu mình hay gốc của tia quét. Số lƣợng vòng ƣợc
tự ộng chỉ rõ bởi việc lựa chọn vòng khoảng cách và khoảng thời gian của chúng
ƣợc hiển thị vị trí trên bên trái của màn hình.
• Ấn phím RINGS trên bảng iều khiển ể xác ịnh vòng cự ly cố ịnh , nếu chƣa
xuất hiên nhấn tiếp RINGS thị ồ sạ ́ng se tƣ̃ ̀ tƣ̀ tăng lên theo
4 mƣ́c và nhấn lần 5 ể xoá vòng cự ly cố ịnh .
Nhấn phim VRM ON ế ̉ hiể n thị
các vòng cự ly di ộng . Sau ó lƣa
chọ n giƣ̣ ̃a NO .1 và NO.2 và
giá trị hiên thời ƣa ra là >.....<.
Chỉ số khoảng cách ƣợc thể hiên tạ i gọ ́c dƣới bên phải màn hình.
Mỗi vòng cƣ ly di ộ ng tƣơng ̣
ứng với khoảng cách ịa l ý khi
iều chinh phỉ m RANGE ́ + hay
RANGE – thì bán kính của vòng
cự ly di ộng ƣợc thay ổi.
1.17 ĐO PHƢƠNG VI TƢƠNG Ƣ̣ ́ NG •
Sƣ̉ dung cạ ́c ƣờng phƣơng
vi iệ n tƣ̣ ̉ EBL ể o phƣơng vị của
mục tiêu .Có 2 ƣờng phƣơng vi iệ
n tƣ̣ ̉ : EBL No.1 và EBL No.2 • Nhấn phim EBL ON ế ̉
bât cạ ́c ƣờng phƣơng vi iệ n tƣ̣ ̉ . lOMoAR cPSD| 15962736
• Chỉ số phƣơng vị ƣợc thể hiên tạ i gọ ́c trái phia dƣớ ́i màn hình.
• Nhấn EBL OFF ể xoá mỗi ƣờng phƣơng vi iệ n tƣ̣ ̉ .
Xoay EBL quay theo chiều kim ồng hồ hay ngƣợc chiều kim ồng hồ cho ến khi ƣờng này
chia ôi mục tiêu cần o, ọc phƣơng vị của nó ở phía dƣới góc trái màn hình.
Giá trị EBL ƣa ra chữ “R” (tƣơng ối) nếu giá trị này tƣơng ối so với hƣớng mũi
tàu. Hiễn thị “T” nếu giá trị này so với hƣớng bắc thật.
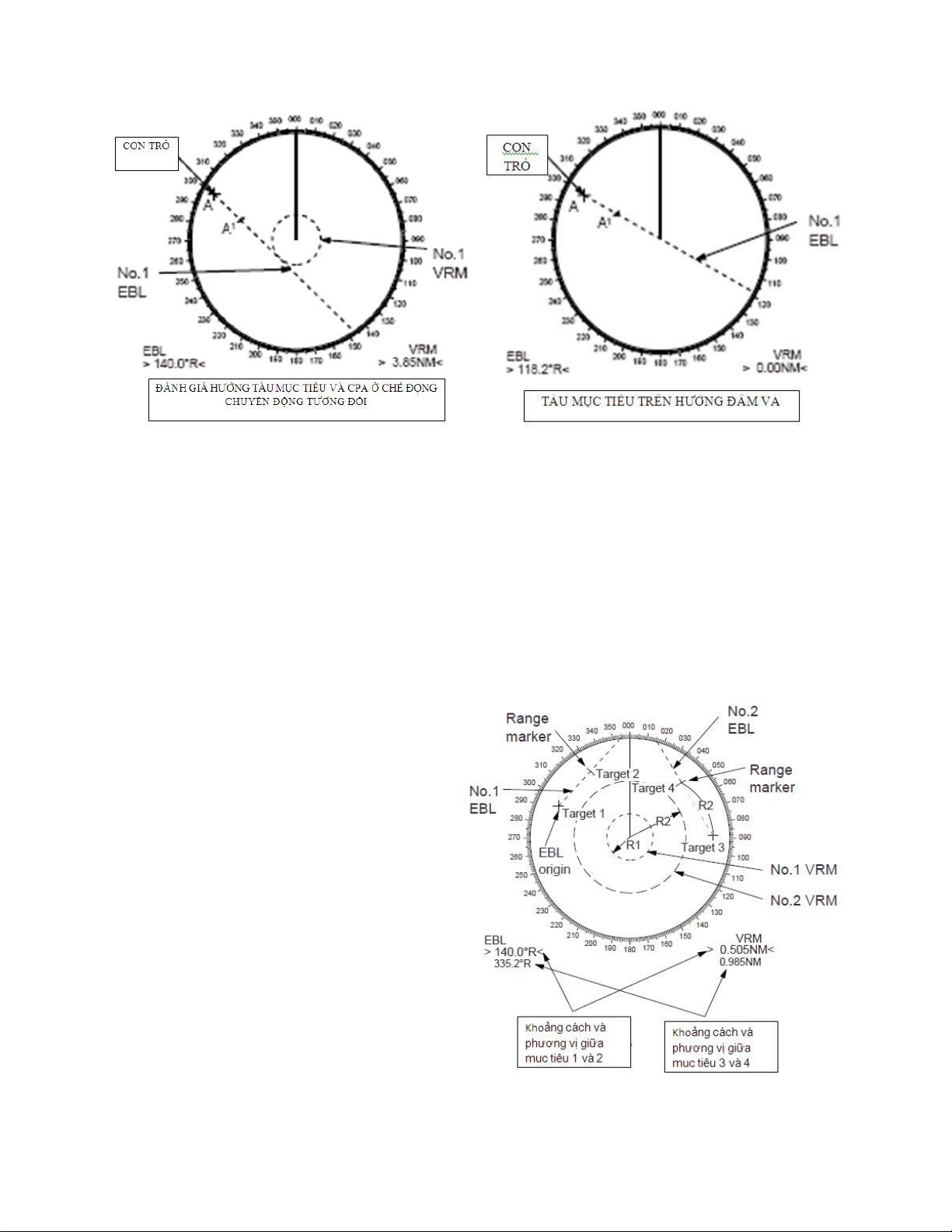
1.18 DƢ ĐOẠ́ N VA CHAM BẶ̀ NG EBL
• Điểm gốc của EBL có thể ƣơc ặ t tạ i mộ t vị trị tuý ̀ ý bằng cách iều chinh ̉
chuột ể thuận tiện cho việc o phƣơng vị và khoảng cách giữa các mục tiêu
. Cũng nhƣ ể ánh giá khả năng xảy ra va chaṃ .
• ĐỂ ĐÁNH GIÁ KHẢ NĂNG VA CHẠM TA LÀM NHƢ SAU : 1. Nhấn phim EBL ON ế ̉ khởi ông EBL ̣ (no.1 hoăc nọ .2 ).
2. Đặt con trỏ trên một mục tiêu mong muốn bằng cách iều chỉnh chuột. 3. Nhấn phim EBL OFFSET vá
̀ thay ổi iểm gốc củ a EBL ến vi tri con trọ ̉
. Nhấn phím EBL OFFSET lần nữa ể cố ịnh EBL gốc .
4. Sau khi ơi ̣ 1 vài phút , iều chinh EBL ến khi EBL cắt mủ c tiêu tạ i iệ
̉m mới A’. Giá trị EBL thể hiện hƣớng của tàu mục tiêu. Giá trị này là “T” hay “R”
tùy thuộc vào sự cài ặt ở RADAR 2 menu.
Nếu lƣa chọ n tƣơng ốị , thì chỉ số CPA ƣợc thể hiện bằng cách sử dụng một
VRM. Nếu EBL cắt qua tâm tia quét t hì mục tiêu tàu trên một h ƣớng va chaṃ .
5. Để ặt lại iểm gốc EBL tại vị trí tàu mình thì nhấn EBL OFFSET một lần nữa. lOMoAR cPSD| 15962736
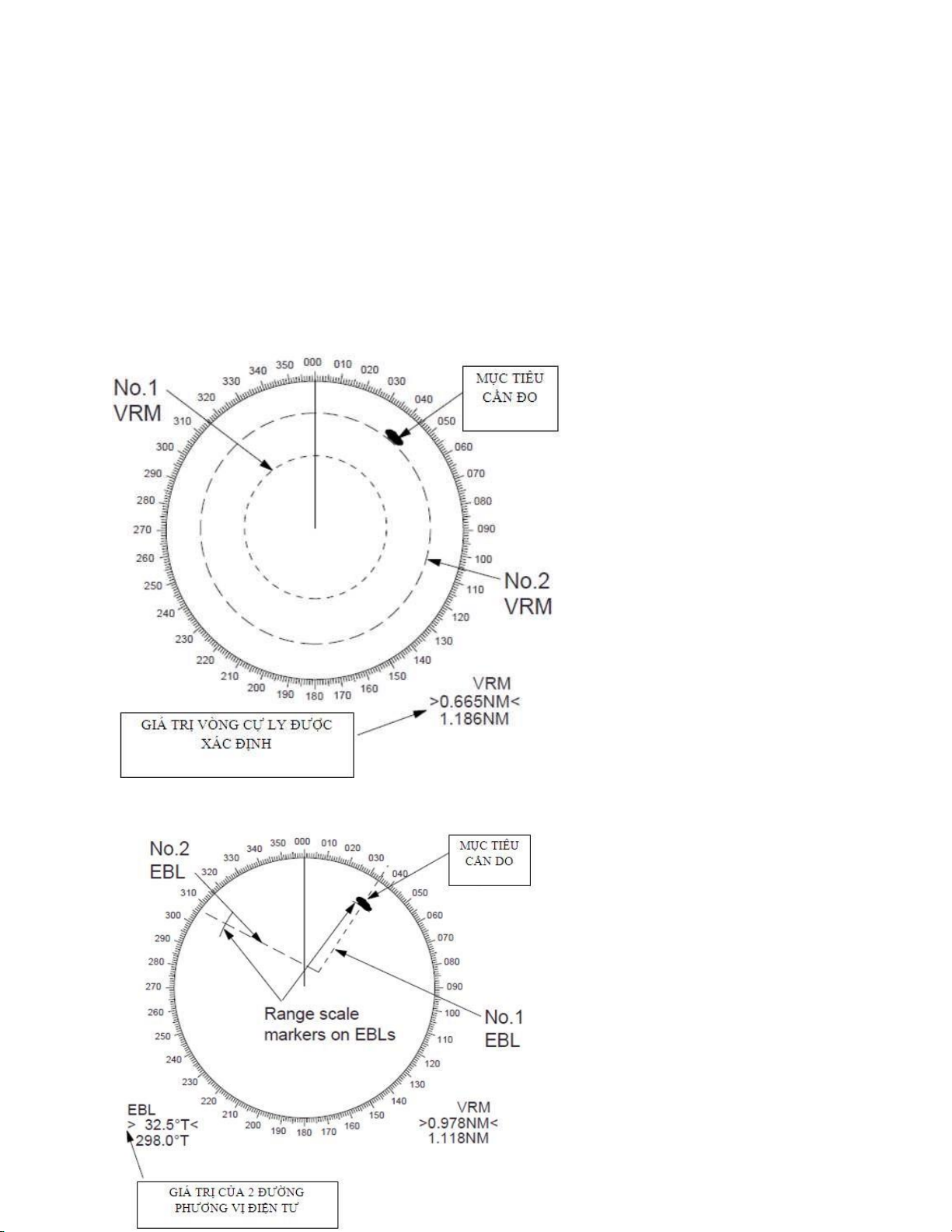
1.19 ĐO PHƢƠNG VI VẠ̀ KHOẢ NG CÁ CH GIƢ̃A HAI MUC TIÊỤ
• Nhấn phim EBL OFFSET vá ̀ lƣa chọ n iệ ̉m gốc của ƣờng phƣơng vi iệ n tƣ̣ ̉
No. 1 ( giả sử mục tiêu 1) bằng chuột, xoay iều chinh EBL ến kh i EBL qua mủ c tiêu ̣ khác (mục tiêu 2).
Xoay iều chinh vỏ ̀ng cƣ lị di
ông ̣ VRM ến khi iểm khoảng cách tiếp xúc với mục tiêu thứ 2. Số ọc VRM thể hiên tạ i gọ ́c dƣới bên
phải màn hinh ̀ chỉ ịnh khoảng cách giữa 2 mục tiêu. Có thể lăp lạ i cạ ́c bƣớc tƣơng tƣ̣
trên ̣ các mục tiêu thứ 3 và 4
bằng cách sƣ̉ dụng No.2 EBL và No.2 VRM .
Phƣơng vi ƣợ c thệ ̉ hiên tƣơng ối tợ ́i
tàu ta cùng với chữ “R” hoặc phƣơng vị
thât vợ ́i “T” tuỳ theo lƣa chọ n EBL ̣ lOMoAR cPSD| 15962736
tƣơng ối hay thât trên ̣
RADAR 2 menu. Nhấn EBL OFFSET lần nƣ̃a ể ƣa iểm gốc EBL tại vị trí tàu.
1.20 CÀI ĐẶT VÙNG CẢNH BÁO ( BÁO ĐỘNG)
• Vùng báo ộng có thể ƣợc ặt bằng cách ặt cảnh báo hàng hải ến các mục tiêu. Nhâp vạ
̀o vùng xác ịnh nào ó ở nơi nhìn thấy và nghe rõ báo ộng .
• Vùng báo ộng có vị trí rộng bằng 0.5 hải lý trong vòng iều khiển và bảng iều khiển
tốt nhất trong khoảng 3.0 – 6.0 hải lý từ tàu. Vùng cảnh báo có thể ƣợc cài ăṭ hình
quạt giữa 0 và 360 ô ̣ở mọi hƣớng.
• Cài ặt vùng báo ộng : 1.
Đặt con trỏ t ại iểm”A” sử dụng chuột và nhấn phím GUARD ALARM trên pa nô
iều khiển. Một tin nhắn SET GUARD xuất hiện tại phía dƣới góc phải màn hình. 2.
Di chuyển con trỏ ến iểm “B” và nhấn phim GUARD ALARM sau ó ́ vùng báo
ông cụ ̃ng nhƣ hinh à ̉nh a ƣỡ c tạ o nên vạ ̀ biểu tƣơng GUARD xuất hiệ n thay thế
cho ̣ SET GUARD tai phị a dƣớ ́i góc trái màn hinh̀ .
Tắt báo ộng nghe thấy và phục hồi lại báo ộng: lOMoAR cPSD| 15962736
Mục tiêu i vào vùng báo ộng thì chúng ta sẽ nhìn thấy ( sáng lên, nhấp nháy) và nghe thấy(
tiếng bíp). Để tắt báo ộng nghe thấy nhấn “ GUARD ALARM ”, và dòng chữ GUARD
ACK thay thế cho GUARD trên màn hình.
Điều này chỉ tắt báo ộng nghe thấy chứ không làm hết nhấp nháy của mục tiêu trong vùng
báo ộng. Để phục hồi lại báo ộng nghe thấy ta nhấn GUARD ALARM một lần nữa.
Dỡ bỏ báo ộng: nhấn và giữ GUARD ALARM ít nhất 3 giây.
Chú ý: vùng báo ộng chỉ dựa vào những mục tiêu có cƣờng ộ dội ủ mạnh. Do mục tiêu bờ,
á ngầm, những con tàu khác hoặc những bề mặt khác nhƣng có thể là sự dội lại từ mặt
biển hoặc các chất lắng tụ lại. Phải iều chỉnh phù hợp GAIN, A/C SEA, và A/C RAIN ể
giảm nhiễu ể tránh báo ộng nhầm các mục tiêu ảo. Cài ặt vào và ra vùng báo ộng
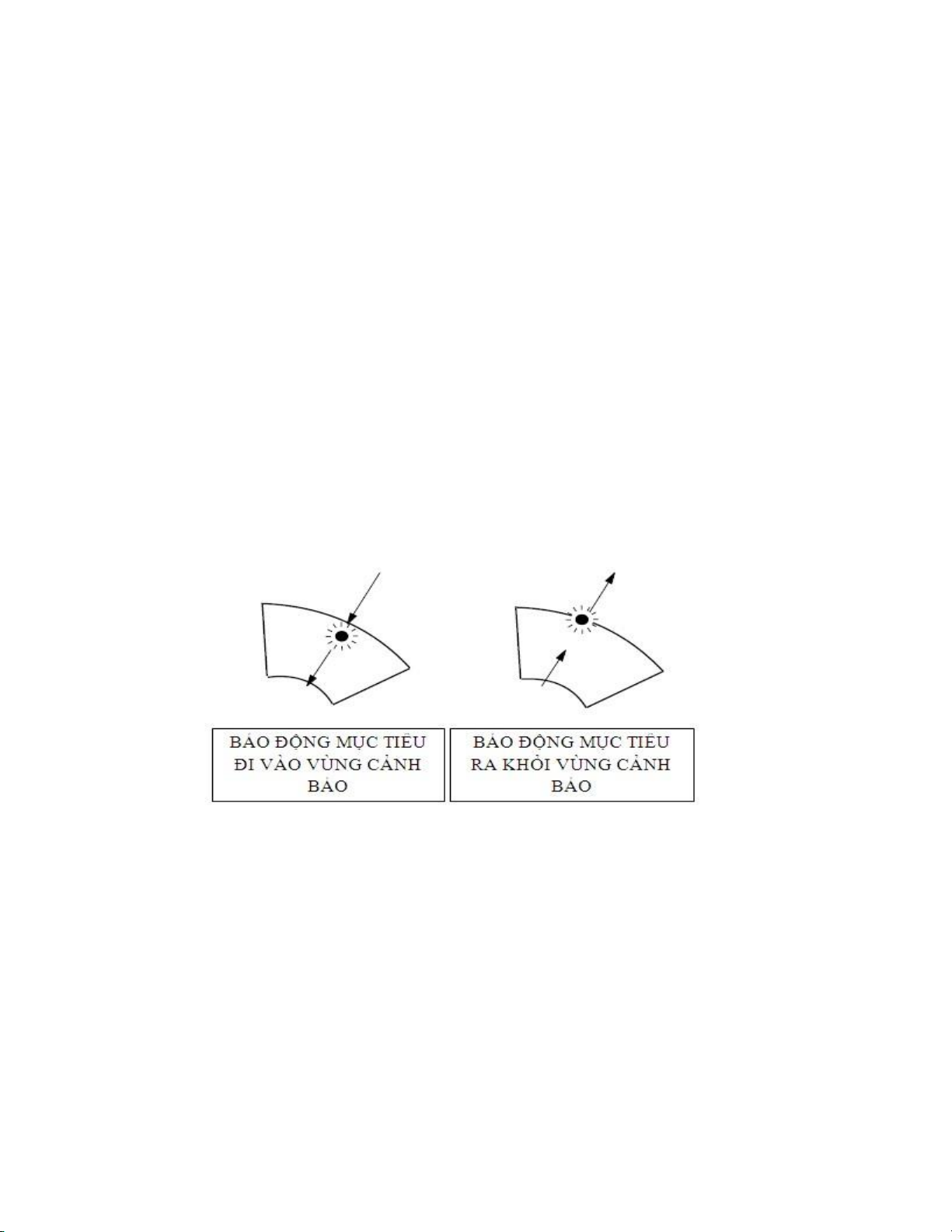
• Trong kiểu R -type, chế ô vạ ̀o và ra khỏi vùng báo ông cọ ́ thể ƣơc lƣ̣ a chọ n trên ̣
menu RADAR 2. Trong IMO-type ,chỉ có báo ộng vào . Trong báo ông vạ ̀o có thể
nhin hoằ c nghe bạ ́o ộ ng khi tin hiế u cụ ̉a muc tiêu xâm nhậ p vụ ̀ng báo ông ̣ . Báo
ộng ra ƣợc thể hiện khi mục tiêu ã ra khỏi vùng báo ộng .
1.21 ĐIỀU CHỈNH LÊCH TÂṂ
• Vị trí của tàu ta hoặc tâm tia quét có thể ƣợc thay ổi ể mở rộng khu vƣc quan ̣ sát thay
cho việc iều chỉnh thang tầm xa lớn hơn . Trên R-type thi iề ̉m gốc của tia quét ƣơc lệ
ch tâm ến mộ t iệ ̉m ăc biệ t bợ ̉i con trỏ , ể tăng thang tầm xa lên 100% của thang tầm
xa sử dụng .Trên IMO-type tâm tia qué t có thể ƣơc iều ̣ chỉnh ến vị trí con trỏ ,nhƣng
không vƣơt quạ ́ 75% của thang tầm xa sử dụng , nếu con trỏ ƣơc ặ t quạ ́ 75% của
thang tầm xa thì tâm của tia quét sẽ bị lệch ến iểm giới han lạ ̀ 75%. lOMoAR cPSD| 15962736
• Đặc iểm của chức năng này không thể sƣ̉ dung ƣợ c trên thang tầm xa lợ ́n nhất . THAO TÁ C LÊCH TÂṂ :
1. Đặt con trỏ tại vị trí mà bạn
muốn sau ó di chuyển tâm tia quét
bằng cách iều chinh ̉ chuột. 2.Nhấn phim OFF –́
CENTER sau ó iểm gốc của tia quét a ̃ ƣơc lệ ch tâm ến vị trị con tró ̉ .
3. Để thoát khỏi chế ô lệ ch ̣
tâm, nhấn phim OFF –́ CENTER lại lần nữa .
1.22 ĐỘ DÀI TÍN HIỆU DỘI LẠI
• Trên nhƣ̃ng khoảng cách dài nhƣ̃ng t ín hiêu dộ i lạ i tƣ̣ ̀ muc tiêu tợ
́i ƣợ c rút ngắn trong iều chinh phƣơng vỉ
lạ ̀m cho chúng khó thấy .trên
thang tầm xa ngắn và trung binh nhƣ là ̀ 1.5, 3 và 6 hải lý, kích thƣớc của các mục
tiêu không thay ổi nhân ƣợ c nhọ ̉ hơn trên màn h ình nhƣ chúng ở gần tàu ta .
• Có 2 loại :ECHO STRETCH 1 cho thang tầm xa dài , ECHO STRETCH 2 trên thang tầm xa 1.5 – 6 NM.
• Để kich hoá t ECHO STRETCḤ :
1. Nhấn phim RADAR MENU tron g sơ ồ́ phím ể hiện ra menu FUNCTION.
2. Nhấn phim ́ [2] ể lựa chọn ECHO STRETCH . lOMoAR cPSD| 15962736
3. Nhấn phim ́ [2] cho ến khi xuất h iện lƣa chọ n ECHO STRETCH ̣ 1, 2 hoăc ̣ OFF
cũng nhƣ lựa chọn tối ƣu .
4. Nhấn ENTER ể chấp nhân lƣ̣ a chọ ṇ . Nhấn MENU RADAR ể óng chức năng lại. PHÓNG TO VỚI ES1
Nếtiêuu kho khó nhảng cách mận thấy ục
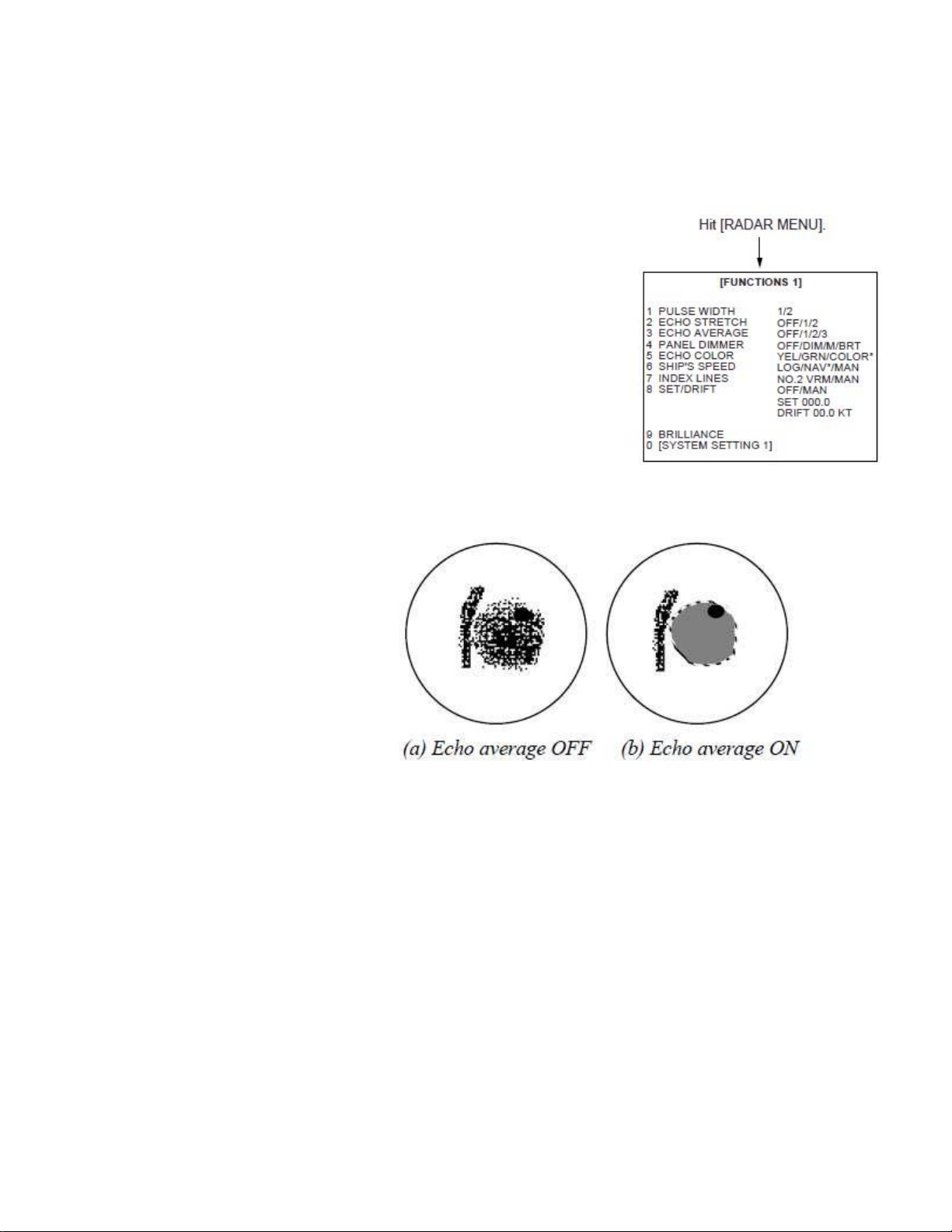
1.23 TRUNG BÌNH TÍN HIỆU DỘI LẠI (ECHO AVERAGING)
Nét ặc biệt của ECHO AVERAGING có hiệu quả ể khử nhiễu biển. Những tín hiệu
nhận từ những mục tiêu ổn ịnh nhƣ là những con tàu xuất hiện hầu hết các vị trí trên
màn hình khi anten quay. Mặt khác những tín hiệu không ổn ịnh nhƣ là nhiễu biển
xuất hiện những vị trí ngẫu nhiên.
Để phân biệt những mục tiêu thực từ nhiễu biển, radar phải thực hiện quét i quét lại
một cách tƣơng quan. Sự tƣơng quan này ƣợc thực hiện bằng sự lƣu trữ và tính
trung bình những tín hiệu dội qua những khung bức tranh liên tiếp. Nếu tín hiệu dội
về liên tục và ổn ịnh, nó ƣợc xuất hiện bình thƣờng trên màn hình. Nhiễu biễn là lOMoAR cPSD| 15962736
trung bình những những lần quét liên tiếp là kết quả của sự giảm ộ sáng, làm nó dễ
dàng phân biệt với mục tiêu thực từ nhiễu biển.
Để sử dụng tốt chức năng ECHO AVERAGE, ta khử nhiễu biển với A/C SEA và làm theo chỉ dẫn sau:
1. Nhấn RADAR MENU ể xuất hiện FUNCTIONS menu.
2. Nhấn phím [3] ể chọn ECHO AVERAGING
3. Nhấn tiếp phím [3] ến 1, 2, 3 hoặc OFF theo ý bạn OFF: TẮT
1: Giúp phân biệt những mục tiêu từ nhiễu biển và
khử nhòe của các mục tiêu không cố ịnh
2: Phân biệt những mục tiêu nhỏ cố ịnh nhƣ các phao hàng hải
3:Ổn ịnh khoảng cách các mục tiêu trên màn hình
4. Nhấn ENTER ể kết thúc sự lựa chọn của bạn và nhấn RADAR MENU ể óng chức năng lại.
1.24 TRƠ GIÖP VẼ TỰ ĐỘNG ̣ (EPA)
• Nhƣ̃ng muc tiêu ƣợ c ngƣợ
̀i iều khiển lƣa chọ n tối a lạ ̀ 10
mục tiêu có thể ƣợc vẽ bởi thiết bị iện tử (hoăc bằng taỵ ) ể ƣớc ịnh hƣớng
di chuyển của chúng . Năm vi trƣợ ́c có thể ƣơc thệ ̉ hiên chọ mỗi
muc tiêu ƣợ c vẹ ̃ . Nếu bạn ánh dấu 7 lần trên môt mụ c tiêu nhất ị nḥ
, lần ánh dấu ầu tiên se bĩ xoạ ́ . lOMoAR cPSD| 15962736
Môt vector xuất hiệ n khi bạ n ạ ́nh
dấu lần thƣ́ 2 cho muc tiêu vạ ̀ thời gian
ƣơc tị nh cho mố ̃i lần ánh dấu mới .
Vectơ thể hiên hƣợ ́ng chuyển ông cụ ̉a
muc tiêu dƣ̣ a trên hai lần ̣ ánh dấu cuối cùng .
- Kiểu hiển thi cọ ́ cả số lân chƣ̃ ̃ tai phị a trên ́
góc phải màn hình thể hiện khoảng cách ,
phƣơng vi, ̣ hƣớng, tốc ô, CPA, TCPA, ̣ BCR và BCT của mục tiêu.
- Nên chú ý rằng hƣớng thât vạ ̀ tốc ô thậ t không ƣợ c tị nh trong thớ ̀i gian chinh́ .
VẼ SƠ ĐỒ CỦA MỘT MỤC TIÊU :
1.Đặt con trỏ trên mục tiêu mong muốn bằng cách iều khiển trackball . 2. Lƣa chọ n ̣
Plot no. bằng cách nh ấn một phím plot no. trên sơ ồ phiḿ dùng ể ánh dấu. 3.
Nhấn phim ACQ trên bá ̉ng iều khiển và lƣa chọ n vẹ ã ƣỡ c ạ ́nh dấu tai vị trị con ́ trỏ. 4.
Xem thời gian EPA ƣơc hiệ
̉n thi trên gọ ́c phải màn hinh ̀ ợi ít nhất 30
giây. Đặt con trỏ trên mục tiêu tại vị trí mới của nó , chọn vẽ cùng một mục tiêu và nhấn phím ACQ .
- Di chuyển ến vi trị múc tiêu mợ́i và vi trị cú ̃ ƣơc ạ ́nh dấu bằng môt iệ ̉m nhỏ .
5. Để thu các muc tiêu mợ́i , lâp lại cạ́c bƣớc trên lƣa chọn plot khạ ́c .
Chú ý: nếu một mục tiêu ƣợc ánh dấu một lần mà sau 10 phút không ánh dấu lại thì phía
trên bên phải của màn hình xuất hiện lời cảnh báo “ UPDATE PLOT No” và plot no. của
mục tiêu sẽ nhấp nháy. Nếu muốn tiếp tục ánh dấu mục tiêu ó thì tác ộng vào nó trong
vòng 5 phút. Ngƣợc lại sẽ mất mục tiêu và số lần ánh dấu và dữ liệu của mục tiêu sẽ bị xóa. lOMoAR cPSD| 15962736
Vec tơ thật hoặc vecto tƣơng ối ( true or relative vecto)
True vecto có thể ƣợc hiển thị với sự tham khảo từ hƣớng bắc. Nhấn VECTOR TRUE/REL
ể chọn sự biểu thị hợp lý. Giá trị vecto ƣợc thể hiện góc trên bên phải của màn hình.
Vecto time ( chiều dài vecto)
Chiều dài vecto có thể cài 30 giây, 1, 2, 3 ,6, 12. 15 hoặc 30 phút và thời gian lựa chọn
ƣợc thể hiện góc trên bên phải của màn hình.
Nhấn VECTO TIME cho ến khi ạt yêu cầu. Đầu mút của vecto cho ta ánh giá vị trí của mục
tiêu sau khi thời gian lựa chọn vecto trôi qua.
Dữ liệu mục tiêu (target data)
Radar tính toán các phƣơng hƣớng chuyển ộng của các mục tiêu ƣợc ánh dấu nhƣ: khoảng
cách, phƣơng vị, hƣớng i, tốc ộ, CPA, TCPA, BCR và BCT.
Trong head-up và head-up TB phƣơng vị, hƣớng i và tốc ộ ƣợc hiển thị phía trên bên phải
của dải dữ liệu mục tiêu trở thành “TRU”, hoặc “REL” ể tàu bạn phù hợp với sự cài ặt
vecto tƣơng ối. Trong chế ộ north-up, course-up và true motion dữ liệu mục tiêu luôn luôn
ở phƣơng vị thật ( true bearing), hƣớng thật và tốc ộ so với mặt ất. Đọc dữ liệu mục tiêu
Nhấn vào các biểu tƣợng ánh dấu phù hợp và màn hình hiển thị dự liệu của mục tiêu.
RNG/BRG ( range/ bearing): khoảng cách và phƣơng vị từ tàu ta ến vị trí mục tiêu ƣợc
ánh dấu sau cùng với giá trị uôi sau “T” hoặc “R”.
CSE/SPD (Course/ Speed): hƣớng i và tốc ộ ƣợc hiển thị ể mục tiêu ƣợc ánh dấu cuối với
hậu tố “TRU” hoặc “REL” trong ối tƣợng ánh dấu.
CPA/TCPA: CPA (Closest point of Appoach) là là khoảng cách tiếp cận gần nhất của mục
tiêu tới tàu mình. TCPA là thời gian cho khoảng cách tiếp cận gần nhất. Cả hai ều ƣợc tính
toán tự ộng. TCPA ƣợc ếm ến 99.0 phút ,
BCR/BCT: BCR (Bow Cross range) là phạm vi mà tại ó mục tiêu sẽ vƣợt qua trƣớc mũi
tàu ta. BCT (Bow Cross Time) là thời gian ƣớc tính tại ó mục tiêu sẽ vƣợt qua trƣớc mũi
tàu ta. Nếu BCR chƣa xác ịnh, giá trị BCR sẽ ƣợc hiển thị nhƣ *.*. (Khi BCT chƣa xác ịnh, BCT là x.x.) lOMoAR cPSD| 15962736
KẾT THÖC ĐÁNH DẤU MỤC TIÊU
Với EPA bạn có thể vẽ lên tới 10 mục tiêu. Bạn có thể chấm dứt ánh dấu của các mục tiêu
ít quan trọng ể ánh dấu các mục tiêu mới khác Sau ó bấm phím CANCEL. Với Trackball:
Đặt con trỏ (+) trên một mục tiêu mà bạn không muốn theo dõi nữa bởi iều hành trackball và bấm phím CANCEL.
Tất cả các mục tiêu: Để chấm dứt ánh dấu của tất cả mục tiêu cùng một lúc, bấm và giữ
CANCEL cho ến khi tất cả các ký hiệu và những ánh dấu biến mất trong khoảng 3 giây.
NHẬP TỐC ĐỘ CỦA TÀU
EPA yêu cầu nhập vào tốc ộ của tàu và tín hiệu la bàn. Tốc ộ có thể nhập từ máy o tốc ộ (tự
ộng) hoặc nhập bằng tay từ bàn phím ánh dấu.
TỰ ĐỘNG NHẬP TỐC ĐỘ
1. Nhấn phím MENU radar trên bàn phím ể hiển thị FUNCTIONS menu.
2. Nhấn phím [6] ể chọn mục SHIP’S SPEED
3. Nhấn phím [6] lần nữa ể chọn LOG phù hợp.
4. Nhấn ENTER ể xác nhận lựa chọn của bạn
và nhấn RADAR MENU phím ể óng chức
năng FUNCTION menu. Giá trị tốc ộ của tàu
tại trên cùng của màn hình là "LOG”.
NHẬP TỐC ĐỘ BẰNG TAY
Nếu radar không kết nối với máy o tốc ộ hoặc máy o tốc ộ không úng thì ta có thể nhập nhƣ sau:
1. Nhấn RADAR MENU ể hiện chức năng FUNCTIONS menu.
2. Nhấn phím [6] ể chọn mục 6 SHIP’S SPEED.
3. Nhấn phím [6] ể lựa chọn MAN.
4. Nhấn ENTER ể xác nhận lựa chọn.” MAN = XX.KT” xuất hiện ở cuối của chức năng “FUNCTIONS menu”. lOMoAR cPSD| 15962736
5. Nhập tốc ộ tàu bằng cách nhấn tƣơng ứng phím số tiếp theo ENTER mà không bỏ
sót số 0 hàng ầu, nếu có. Ví dụ nếu tốc ộ tàu là 8 hải lý/giờ, [0] [8] [ENTER].
6. Nhấn RADAR MENU ể óng FUNCTIONS menu. Tốc ộ tàu ọc ở trên cùng màn
hình hiển thị tốc ộ tàu mình bởi dòng chữ “MAN”.
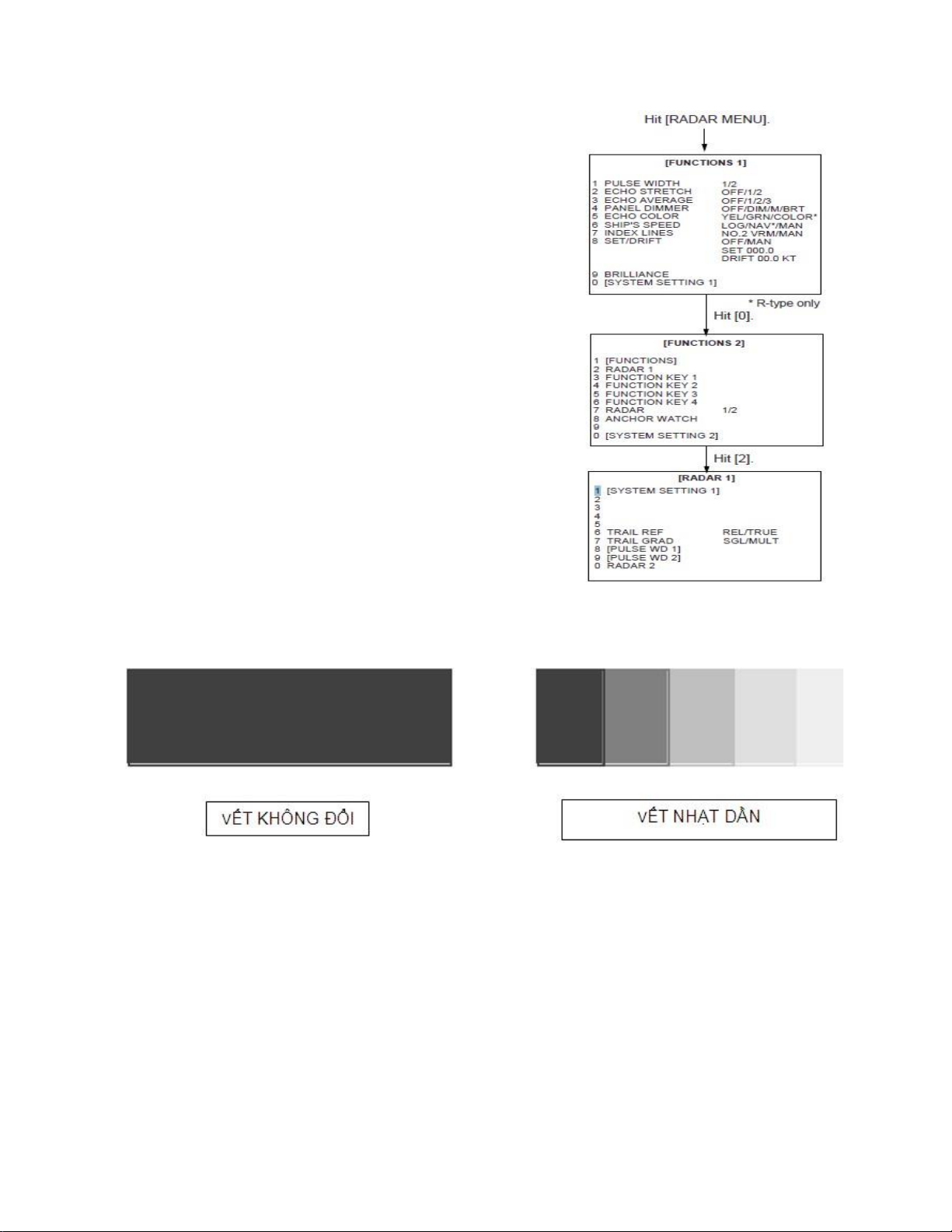
1.25 VẾT MỤC TIÊU
Những vết mục tiêu là hình ảnh lƣu lại những tín hiệu dội lại tùy theo sự di chuyển của
mục tiêu ở TRU hoặc REL. (Vết thật / vết tƣơng ối)
Bạn có thể hiển thị vết mục tiêu ở chuyển ộng thật hoặc chuyển ộng tƣơng ối.
Chú ý: khi vết thật ƣợc chọn trên chế ộ tƣơng ối (RM), thì TRUE TRAIL sẽ xuất hiện
màu ỏ. Trên TM chỉ chọn ƣợc TRUE TRAIL. lOMoAR cPSD| 15962736
Chọn vết theo giá trị tƣơng ối hoặc thật nhƣ sau:
1. Nhấn RADAR MENU ể hiển thị chức năng FUNCTIONS menu.
2. Nhấn phím [0] ể chọn SYSTEM SETTING 1
3. Nhấn phím [2] ể chọn RADAR 1 4. Nhấn phím [6]
ể chọn ối tƣợng 6 TRAIL REL
5. Nhấn phím [6] lần nữa ể chọn REL hoặc TRUE
6. Nhấn ENTER ể xác nhận lựa chọn của bạn ể kết thúc nhấn RADAR MENU.
CÁCH HIỂN THỊ VẾT
Có thể hiển thị vết không thay ổi (single) hoặc nhạt dần (multi)
Để lựa chọn ta làm nhƣ sau:
Nhấn phím [7] trên mục 7 TRAIL GRAD trong bƣớc 4
Nhấn phím [7] ể lựa chọn SGL (kiểu ơn) hoặc MULT (nhiều bóng). HIỂN
THỊ VÀ XÓA VẾT MỤC TIÊU lOMoAR cPSD| 15962736
Nhấn ECHO TRAIL ể khởi ộng hoặc tắt chức năng vết mục tiêu.
Mỗi lần nhấn ECHO TRAILS
trong vòng 5 giây chiều dài của
uôi ( hay thời gian) thay ổi từ 30
giây, 1, 3, 6, 15, 30 phút, nếu tiếp
tục sẽ tắt chức năng ECHO
TRAIL. Cài ặt hiện tại của vết
mục tiêu ƣợc thể hiện góc dƣới bên phải màn hình.
Giả sử rẳng “3MIN” ( 3 phút) ƣợc lựa chọn nếu phím ECHO TRAILS ƣợc nhấn hơn 5
giây thì vết mục tiêu sẽ mất trên màn hình
Giữ ECHO TRAILS nhấn lại khoảng 3 giây sẽ mất dữ liệu của vết mục tiêu trên bộ nhớ ó
cũng là cách ể cài lại vết mục tiêu.
1.26 ĐƢỜNG PHƢƠNG VỊ SONG SONG
Đƣợc sử dụng theo khoảng cách cố ịnh giữa tàu và mục tiêu bờ hoặc một tàu khác ang
hành hải. Đƣờng phƣơng vi ƣợ c vẹ song song ̃ (hai ƣờng EBL).
• Sƣ ị nh hƣợ ́ng của các ƣờng này ƣơc ̣ iều khiển
với bảng iều khiển EBL và khoảng thời gian giữa
các ƣờng xuất hiện ƣơc iều khiệ ̉n với bảng iều
khiển VRM . Số lớn nhất của các ƣờng song song
có thể ƣơc cạ ̀i ăt ̣ : 2, 3 hoăc ̣ 6
HIỂ N THI VẠ̀ XOÁ CÁ C ĐƢỜ NG PHƢƠNG lOMoAR cPSD| 15962736 VỊ SONG SONG
• Nhấn INDEX LINES thi cà ́c ƣờng phƣơng vi song song xuất hiệ ṇ .
• Chắc chắn ƣờng phƣơng vi số hai ạ ̃
ƣơc kị ch hoá t vạ ̀ inh hƣ ớng các ƣờng ̣
phƣơng vi song song trong lệ nh iều
khiệ ̉n cùng với iều chỉnh phím xoay EBL .
• Để xoá các ƣờng phƣơng vi song song ̣
nhấn INDEX LINES môt lần nƣ̣ ̃a .
ĐIỀU CHỈNH KHOẢ NG CÁ CH GIƢ̃A HAI ĐƢỜ NG PHƢƠNG VI SONG SONG̣
1. Nhấn MEN U RADAR ể hiển thi chƣ̣ ́c năng FUNCTIONS menu.
2. Nhấn phim ́ [7] chọn INDEX LINES
3. Nhấn phim ́ [7] ể lựa chọn NO .2 VRM hoăc MAN. ̣
4. Nhấn ENTER ể ồng ý lƣa chọ n cụ ̉a bạn
5. Nếu ban chọ n chế ộ tay ợ ̉ bƣớc
3 “MAN=XX.XX.NM “ hiển thi troṇ
g menu FUNTIONS. Khoảng cách giƣ̃a 2 ƣờng ƣơc nhậ p vạ ̀o bằng các
phim số sau ó ́ nhấn ENTER . Ấn phím 0 ể bỏ qua lựa chọn . Có 6 ƣờng phƣơng vi
song song ̣ nhƣng số ƣờng có thể nhin thấy trên mà ̀n hinh s̀ ẽ ít hơn tuỳ
thuộc vào khoảng thời gian cài ăt cạ ́c ƣờng .
6. Nếu ban chọ n NỌ .2 VRM trong bƣớc 3 thì phải chắc chắn NO .2 VRM ƣơc kị ch ́
hoạt và khoảng cách giữa các ƣờng song song ƣợc iều chỉnh bởi nút iều chỉnh VRM.
7. Nhấn MENU ể óng MENU FUNT IONS. lOMoAR cPSD| 15962736 1.27 TRƢC NEỌ
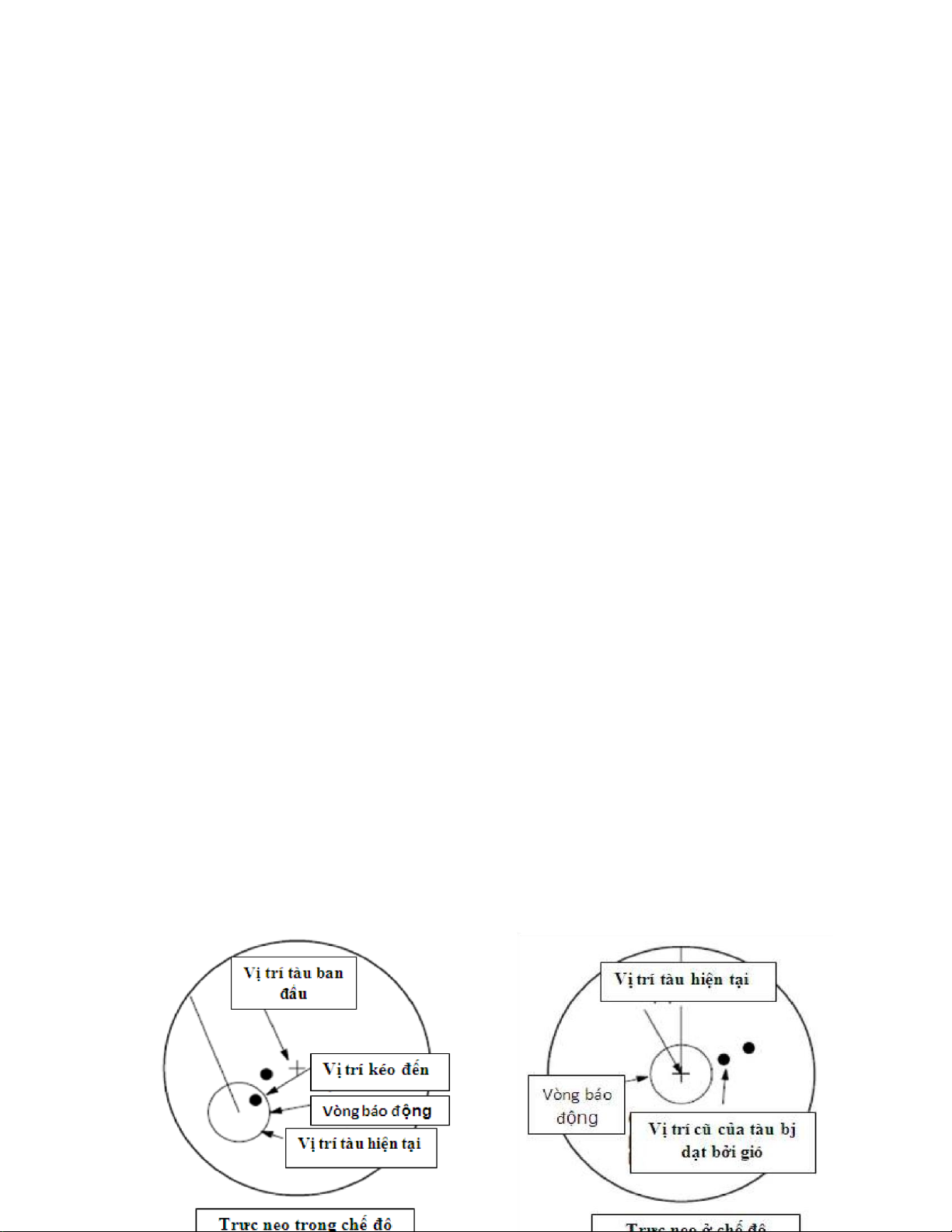
• Trƣc neo gụ ́p ban biết ƣợ c vị trị tá ̀u khi trôi dat bợ ̉i gió và thuỷ triều trong khi
ang neo. Đặc iểm này òi hỏi dữ liệu về vị trí của tàu từ một thiết bị hàng hải trơ giụ ́p
phù hơp ̣ . Khi ó chế ộ trƣc neo sẹ hoã t ộ ng ̣ . Sẽ có một tin nhắn xuất hiên
“ANCHOR WATCH ERR” khi dƣ̣ ̃ liêu về vị trị tá ̀u không ƣơc nhậ p vạ ̀o . TRƢC NEO Ợ ̉ CHẾ ĐÔ SẶ
̃N SÀ NG HOĂC TRONG TỊ ̀NH TRANG TRUỴ ỀN TÍN HIỆU.
• IMO- type: theo quy inh cụ ̉a IMO thì
trƣc neo phạ ̉i ở chế ô ṣ ẵn sàng hoat ̣ ông ̣ .(STANDBY ).
• R- type: trƣc neo ̣ thực hiện ở chế ộ sẵn
sàng hoăc tị nh trà ng ̣ phát. (STANDBY or TRANSMIT ). Cài ặt trực neo.
1. Trong menu ANCHOR WATCH nhấn phim ́
[2] ể chọn ANCHOR WATCH OFF/ON.
2. Nhấn phim ́ [2] ể chọn ON, sau ó nhâp dƣ̣ ̃
liêu cần thiếṭ rồi ENTER. Biểu tƣơng ̣
WATCH xuất hiên ợ ̉ góc trái phia dƣớ ́i màn hình.
3. Nhấn phim ́ [3] ể chọn ALARM OFF/ON .
Sau ó nhấn phím [3] lần nữa ể lựa chọn ON
hay OFF kết thúc bằng phím ENTER ể chấp nhâṇ . lOMoAR cPSD| 15962736
CÀI ĐẶT PHẠM VI BÁO ĐỘNG Nhấn phim ́
[4] chọn ALARM RANGE trên menu ANCHOR WATCH . Nhâp
vạ ̀o phạm vi báo ộng cần thiết trong khoảng
0.1NM và 9.999NM với phim số
vá ̀ nhấn ENTER ể chấp nhâṇ .
Chu vi báo ộ ng trƣc neo sẹ ƣỡ c hiệ ̉n thi vợ ́i chu vi màu ỏ trên màn hinh̀ . Khi tàu
thoát khỏi chu vi cài ặt thì một tiếng báo ộng có thể nghe thấy phát ra và trên màn hình
biểu tƣợng ANCHOR WATCH sẽ ỏ lên.
Để tắt báo ộng này nhấn phim AUDIO OFF trên bá ̉ng iều khiển . HIỂ
N THI ĐƢỢ ̀ NG KÉ O DÀ I
• Nhấn phim ́ [5] chọn HISTORY trên menu ANCHOR WATCH . Nhấn phim ́ [5] ể
bât vạ ̀ kết thúc bằng ENTER. • Môt ƣợ
̀ng kéo dài hoăc cạ ́c chấm kéo dài thể hiên tạ ̀u bi ạ ̉nh hƣởng của
gió và dòng, trong suốt 50 phút, các chấm hoặc vị trí tàu lúc trƣớc sẽ ƣợc hiển thị
liên tục. Khi 50 chấm a hiễ ̉n thi trong ̣ 50 phút, thì khoảng thời gian vẽ sơ ồ là 2
phút và trên 25 chấm ƣơc hiệ ̉n thi trong suốt ̣
50 phút. Tiếp ó khoảng thời
gian thich ́ hơp cụ ̉a chấm là 4 phút và số iểm tối a sẽ là 12. lOMoAR cPSD| 15962736
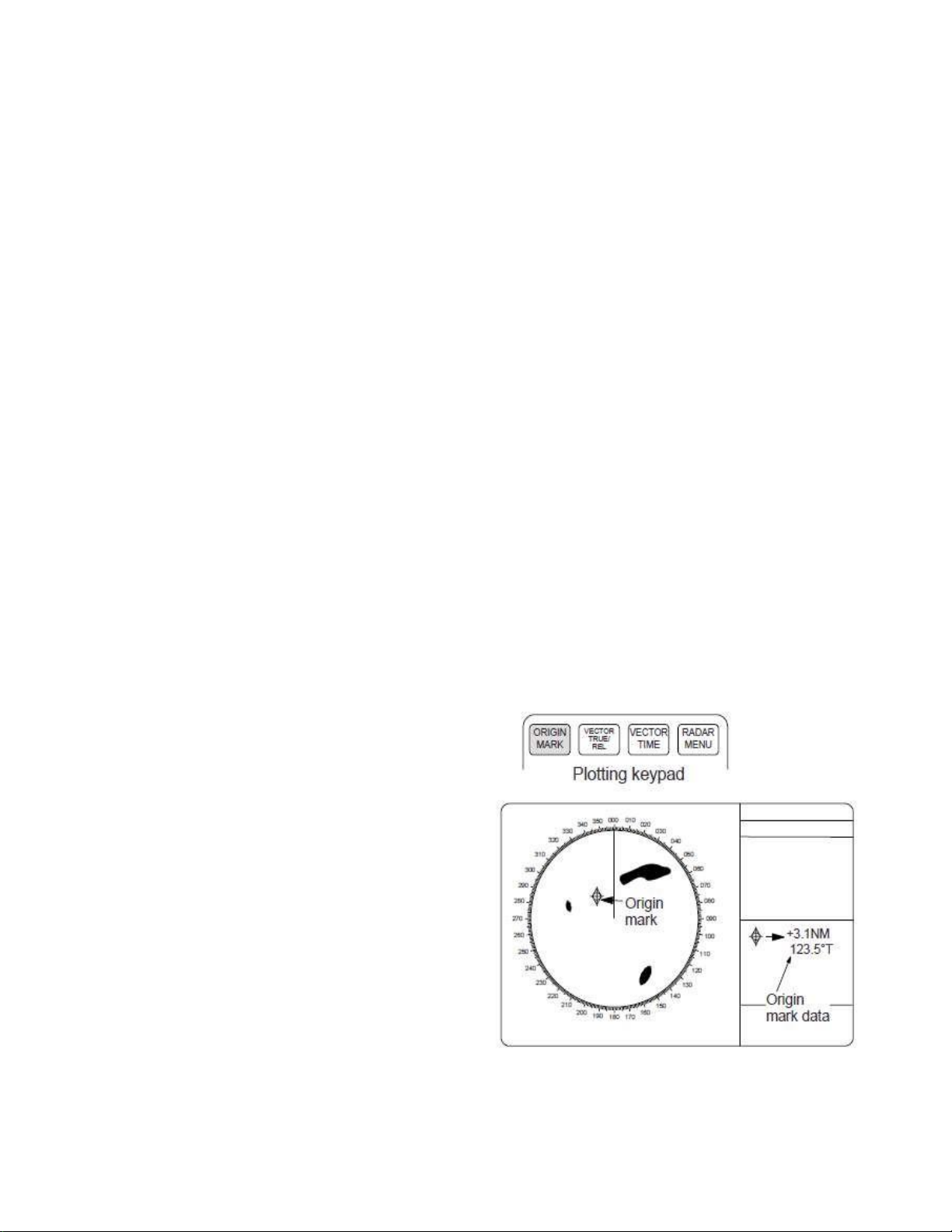
1.28 ĐÁNH DẤU ĐIỂ M GỐ C
• Bạn có thể ánh dấu một vài iểm nguy hiể m, mục tiêu nổi hoặc một iểm ặc biêt ệ ̉
sƣ̉ dung lạ ̀m iểm gốc . Điểm này có vi trị cố í nḥ .
• Sƣ̉ dung iệ ̉m gốc:
1. Đặt con trỏ (+) tại một iểm mà bạn muốn rồi di chuyển bằng chuột.
2. Nhấn phim ORIGIN MARK trên sơ ́ ồ phím. Điểm gốc xuất hiên tạ i vị trị con ́ trỏ.
Khoảng cách và phƣơng vi tạ ̀u se ƣỡ c hiệ ̉n thi dƣợ ́i góc trái của màn hinh̀ .
3. Đo khoảng cách và phƣơng vi ến mộ t mụ c tiêu tƣ̣ ̀ iểm gốc ta di chuyển con trỏ
tới muc tiêụ . Sau ó khoảng cách và phƣơng vi tƣ̣ ̀ iểm gốc ến muc tiêu ƣợ c thệ ̉
hiên tạ i vụ ̀ng dƣ̃ liêu mụ c tiêụ .
4. Để xoá iểm gốc nhấn phim ORIGIN MARK mố t lần nƣ̣ ̃a .
1.29 CHƢ́ C NĂNG PHÓ NG ĐAỊ
• Chƣ́c năng phóng ai ƣợ c dụ ̀ng trên
R – type radar chi ể ̉ phóng ai mộ t vụ ̀ng mong muốn .
1. Đặt con trỏ (+) lại gần iểm mong
muốn bằng cách iều khiển chuột. 2. Nhấn phim X́ 2 ZOOM. Vùng
xung quanh con trỏ và tàu ta tăng lên
gấp ôi cũng nhƣ kich thƣớ ́c rất lớn
và biểu tƣơng ZOOM xuất hi ệ̣
n tại phía dƣới góc trái màn hình .
3. Để huỷ bỏ chế ô ZOOṂ , ta
nhấn lai phị m X́ 2 ZOOM môt lần nƣ̣ ̃a . lOMoAR cPSD| 15962736
CHÚ Ý: iểm ăc biệ t cụ ̉a chƣ́c năng ZOOM là không có tác dung khi hiệ ̉n thi ợ ̉ chế ô ̣ lêch tâṃ .
1.30 CÁC ĐÁNH DẤU Đánh dấu hƣớng mũi tàu
Đánh dấu hƣớng mũi tàu chỉ hƣớng của tàu ta trên tất cả các chế ộ hiển thị. Nó xuất hiện
tại vị trí 00 trên vạch phƣơng vị trên chế ộ HEAD-UP, trong mọi hƣớng phụ thuộc vào
sự ịnh hƣớng của tàu trên chế ộ NORTH-UP và chuyển ộng thật.
XÓA ĐÁNH DẤU TẠM THỜI
Để tạm thời tắt ánh dấu thì xem xét các mục tiêu trƣớc tàu ta ã mất chƣa, nhấn HM OFF.
Dấu mũi tàu sẽ xuất hiện lại khi thả phím ra.
ĐÁNH DẤU HƢỚNG BẮC THẬT (NORTH MARKER)
North marker xuất hiện bỡi các ƣờng gạch gạch ngắn. Trong chế ộ HEAD-UP, north
marker di chuyển quanh vòng phƣơng vị phù hợp với tín hiệu la bàn.
Đánh dấu phía sau ( stern marker) xuất hiện ối diện với ánh dấu hƣớng mũi tàu bằng các ƣờng chấm gạch. lOMoAR cPSD| 15962736
1.31 DANH MỤC CÁC MENU
3 danh mục phím ƣợc cung cấp trên sơ ồ phím: RADAR MENU; E,AUTO PLOT MENU; NAV MENU.
RADAR MENU: cho phép cài ặt các thông số cơ bản của radar.
E, AUTO PLOT MENU: Cung cấp một sự lựa chọn kích thƣớc tiêu chuẩn hoặc
biểu tƣợng lớn của hệ thống ánh dấu mục tiêu.
NAV MENU: cung cấp một sự lựa chọn của dữ liệu hành hải cho màn hình hiển thị.
Mặt khác, nó còn cho phép chọn dữ liệu hiển thị cho VIDEO PLOTTER. lOMoAR cPSD| 15962736
1.32 CÀI ĐẶT RADAR 1 và 2 menu R_type MENU lOMoAR cPSD| 15962736
1.33 CÁC PHÍM CHỨC NĂNG
• Có 4 phím ( # 1-4) trên bảng iều khiển làm viêc giống nhƣ tị nh năng tƣ́ ộ
ng gọ i ̣ lại của iện thoạ i, ngay lâp tƣ̣ ́c viêc cạ
̀i ăt gọ i i sẹ ƣơ ̃c thƣ̣ c hiệ n ặ c biệ t lạ
̀ các phím chức năng ã ƣợc cài ặt trƣớc . Nhƣ̃ng phim lOMoAR cPSD| 15962736
chƣ́ ́c năng cung cấp cách cài ăt radar tốt nhất cho nhụ ̃ng muc ị ch cú thệ ̉ với sƣ hoạ t ộ ng cụ ̉a mộ t phim ơń . • Mỗi phim chƣ́
́c năng có thể ƣơc chị ỉ nh ệ ̉ kết hơp vợ
́i nhƣ̃ng cài ăt riêng cụ
̉a radar mà iều ó se phũ
̀ hơp nhất vợ ́i muc ị ch tí m vì trị cú ̉a ban vạ ̀ xác inh ạ
́nh dấu các iểm (nhƣ phao,
bến tàu, bờ biển hay môt cạ ́i gi tƣơng tƣ̀ ̣ ) thì luôn luôn gắn liền với nhƣ̃ng phim ớ
̉ ầu ể dê dã ̀ng nhân ra nhƣ̣ ̃ng muc ị ch á chĩ ỉ nḥ .
• Nhƣ̃ng phim chƣ́ ́c năng riêng biêt thị ƣờ c ị nh vị hay cạ ̀i ăt
chƣơng trị nh cho ̀ nhƣ̃ng kết quả theo sau bở
i nhƣ̃ng nhân viên ủ iều kiên cụ
̀ng với thời gian sƣ̉ dụng những hƣớng dẫn tiếp theo .
• Phím # 1 : cài ặt hình ảnh .
• Phím # 2 và # 3 :cài ặt hình ảnh và những hoạt ộng cụ thể .
• Phím # 4 : Hoạt ộng cụ thể hay ồng hồ bá o.
Giả sử bạn ang i tìm vị trí dọc bờ biển trong nhiều giờ và bây giờ bạn ang i ến bến
tàu nơi ến cuối cùng của bạn
. Bạn sẽ phải iều chỉnh radar thay ổi từ cài ặt
cho việc di chuyển trên biển thành cài ặt t rong khu vƣc cạ ̉ng . Mỗi khi thay ổi vi trị bá
n phạ ̉i iều chinh radar̉
. Nó có thể gây ra thiệt hại trong những lOMoAR cPSD| 15962736
tình huống xấu. Thay vi phà ̉i cài ăt radar trong mộ ̃i trƣờng hơp thị
nhƣ̀ ̃ng phim chƣ́ ́c năng có thể ƣơc chị ỉ
nh cọ ́ khả năng cũng nhƣ
cách cài ặt tốt nhất trong những tình huống thƣờng xảy ra .
Hình ảnh tùy chọn cài ặt có thể gán từ các phím chức năng ƣợc thể hiện bảng sau: Mục Mô tả RIVER
Thiết lập tối ƣu cho hành hải trên sông BOUY
Thiết lập tối ƣu ể phát hiện hƣớng các phao, tàu
thuyền nhở và bề mặt nhỏ khác. SHIP
Thiết lập tối ƣu ể phát hiện các tàu SHORT
Thiết lập tối ƣu ể phát hiện trong khoảng cách
ngắn sử dụng ở thang tầm xa 6nm hoặc lớn hơn CRUISING
Để tuần biển sử dụng ở thang tầm xa 1.5 nm hoặc lớn hơn. HARBOR
Thiết lập tối ƣu cho việc hành hải trong khu vực
cảng, sử dụng ở thang tầm xa 1.5 hoặc nhỏ hơn COAST
Dùng cho hành hải gần bờ sử dụng ở thang tầm xa 12nm hoặc nhỏ hơn OCEAN
Hành trình xuyên ại dƣơng sử dụng ở thang tầm xa 12nm hoặc lớn hơn ROUGH SEA
Thiết lập tối ƣu cho thời tiết xấu hoặc mƣa lớn
Mỗi hình ảnh ƣợc xác ịnh là sự kết hợp của một vài cài ặt của radar ể ạt ƣợc sự tối
ƣu cho tình huống hành hải riêng biệt. Các cài ặt khử nhiễu giao thoa, ộ dài của tín
hiệu dội, tín hiệu trung bình, tự ộng khử nhiễu biển, loại xung phát và khử tiếng ồn
ều liên quan ến sự lựa chọn hình ảnh ở trên.
Điều chỉnh các tính năng này trên hệ thống phím chức năng thay ổi chức năng cài
ặt ban ầu. Để khôi phục lại các thiết lập ban ầu cho một phím chức năng ặc biệt, iều
ó là cần thiết ể hiển thị các phím chức năng có liên quan menu và các tùy chọn trình ơn thích hợp.
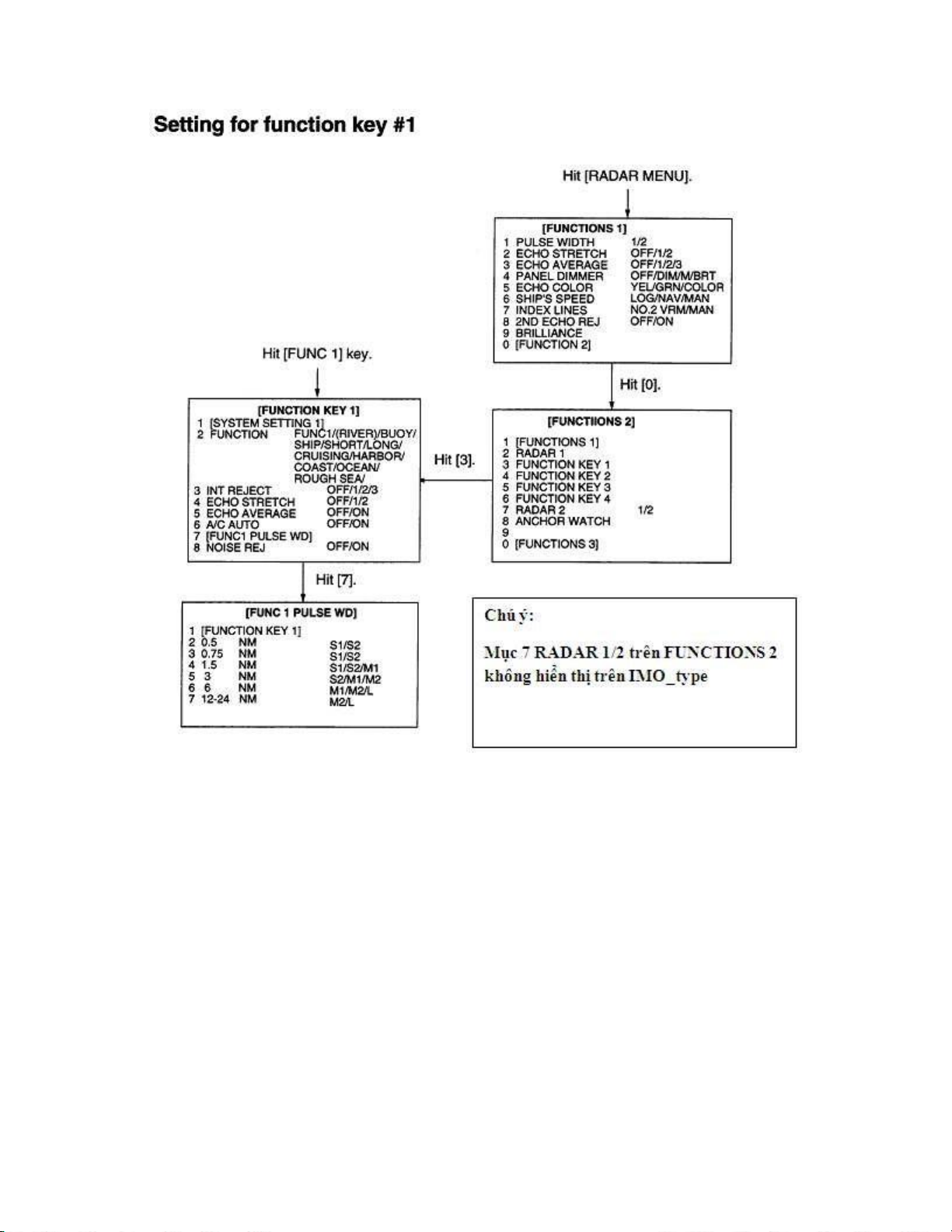
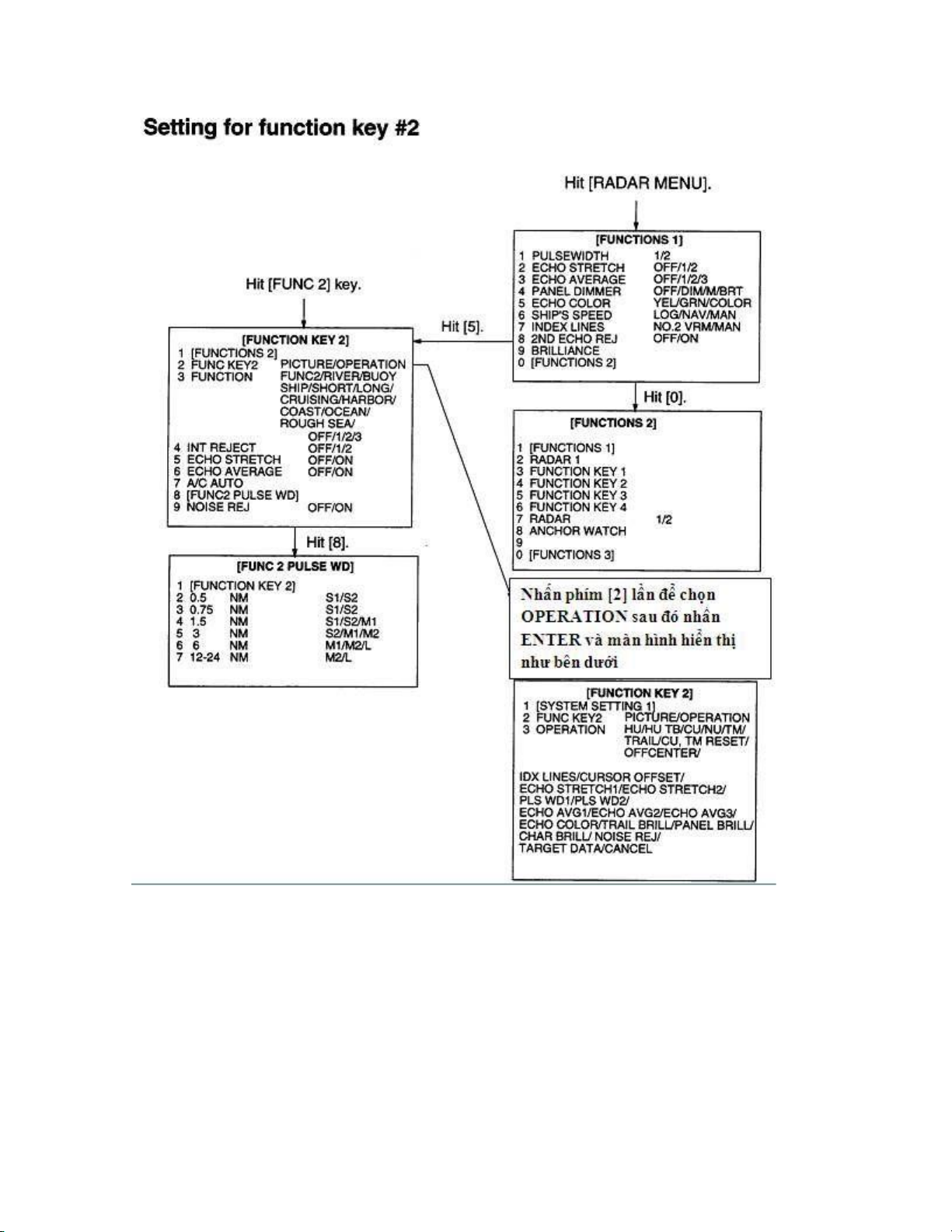
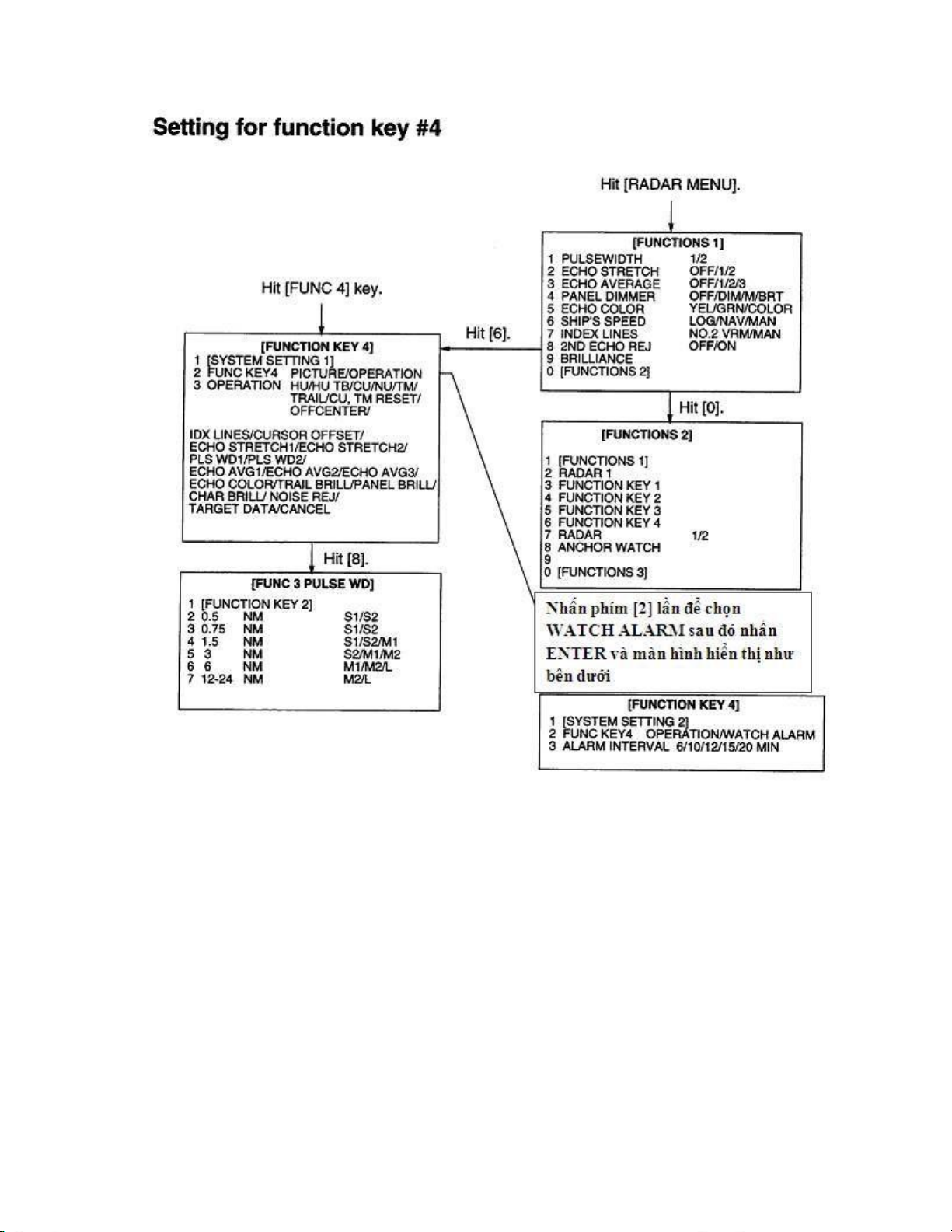
CÀI ĐẶT CHO CÁC PHÍM CHỨC NĂNG lOMoAR cPSD| 15962736 lOMoAR cPSD| 15962736 lOMoAR cPSD| 15962736 lOMoAR cPSD| 15962736 lOMoAR cPSD| 15962736 1.34 EPA MENU
Mục EPA hiển thị bằng cách nhấn E,
AUTO PLOT MENU. Bạn có thể cài ặt nhƣ sau:
1. COLLISION ALARM: bạn có
thể cài CPA và TCPA cho việc theo dõi mục tiêu.
2. MARK SIZE: thay ổi kích thƣớc hình vẽ
3. PLOT NO: Hiển thị hoặc ẩn số mục tiêu ánh dấu ở mép phải của mục tiêu ánh
dấu (vòng tròn và vuông). Mục tiêu ƣợc chọn (hình vuông) có số của nó mặc dù PLOT NO. là OFF.
4. REL VECT TGT DATA: khi vecto của mục tiêu ở tƣơng ối, chọn dữ liệu hiển
thị ở REL hoặc TRUE trên HU và HUTB. Dữ liệu mục tiêu luôn hiển thị ở TRUE khi ở CU, NU và NUTM.
5. AUDIO ALARM: chọn âm thanh báo ộng ON hoặc OFF ể báo ộng các mục tiêu có thể âm va.
1.35 CÁCH HIỂN THỊ DỮ LIỆU VÀ THÔNG TIN HÀNG HẢI
• Các dữ liệu hàng hải khác nhau có thể ƣợc hiển thị trên màn hình rada r. Dƣa vạ ̀o
các thông tin có phù hợp hay không ƣợc cung cấp từ radar nhƣ : vị trí tàu, vị trí con
trỏ, dƣ̃ liêu waypoinṭ , gió, dòng ,ô sâụ , nhiêt ộ nƣợ ́c, góc bẻ lái, tốc ô quay ̣ và tuyến ƣờng hàng hải .
• Chú ý rằng dữ liệu không liên quan với cách thể hiện của radar ta làm theo dƣới ây:
1. Nhấn phim NAVMENU trên sơ ồ hiế ̉n thi thông tin NAVINFORMATIOṆ .
2. . Chọn dữ liệu hàng hải cần ƣa vào và nhấn núm ENTER ể chấp nhận .
3. Cũng vậy ể cài ặt những dƣ̃ liêu tham khạ ̉o riêng ta di chuyển ến trang tiếp theo. 4. .Nhấn phim NAV MENU ế
̉ óng NAV INFORMATION MENU . lOMoAR cPSD| 15962736
HIỂN THỊ WAYPOINT NGOÀI
Đánh dấu và dữ liệu của iểm chuyển
hƣớng ngoài từ EPFS có thể hiển thị bởi
cài ặt NAV LINE menu. Để hiển thị nhấn “ NAV MENU” [7]
CHÚ Ý: khi iểm chuyển hƣớng lớn hơn
5000nm, thì từ tàu ta dữ liệu ọc là “ >5000nm”.
1.36 BẢN ĐỒ RADAR
• Môt bạ ̉n ồ radar ƣơc kết hợ p bợ ̉i nhƣ̃ng ƣờng bản ồ và nhƣ̃ng biểu tƣơng nhợ ̀ ó mà ngƣời sƣ̉ dung ̣
có thể nhận ịnh rõ và nhập vào các dữ liệu hàng hải
, tuyến ƣờng và theo dõi dƣ̃ liêu trên radar ̣
. Đƣờng bản ồ thì dễ sử
dụng trong hàng hải . Do ó ngƣời quan sát có thể inh rọ ̃ ể hƣớng dân ƣỡ ̀ng và lâp kế hoạ c ̣ h ƣờng i. lOMoAR cPSD| 15962736
LÂP BẠ̉ N ĐỒ RADAR
Cách vào iểm nhƣ sau :
1. Nhấn núm NAV MENU ể hiên NAV ̣ INFORMATION 1.
2. NHẤ N PHÍM [1] ể hiển thị bản ồ radar RADAR MAP
3. Nhấn [2] 2 lần ể chọn ON và nhấn tiếp ENTER
bản ồ hƣớng dân sẽ hiễ n ra trên ̣ phía trái của màn hình .
4. Nhấn [5] môt vạ ̀i lần chon cạ ́ch vào theo m ẫu, con trỏ, L/L hay vi trị t́ àu.
5. Nhấn ENTER sau ó nhấn NAV MENU .
Một bản ồ radar chứa tới 1500 iểm bao gồm cả iểm ánh dấu và ƣờng thẳng.
BẰ NG VI TRỊ́ CON TRỎ :
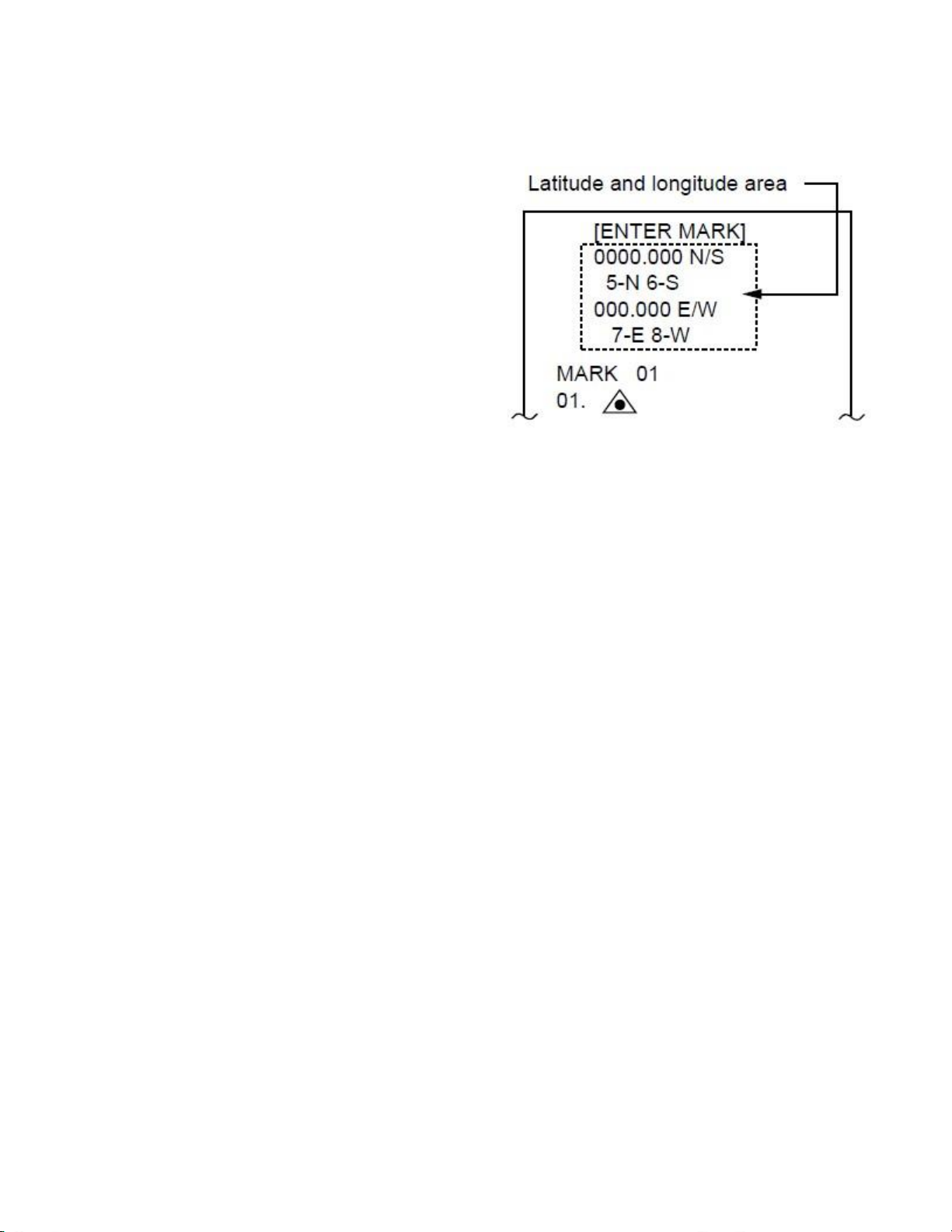
1. Nhấn phim MARK ế ̉ hiển thi ENTER ̣ MARK menu. 2. Nhâp số iệ ̉m ánh dấu rồi chon iệ
̉m yêu cầu , sau ó nhấn phim ENTEŔ .
3. Đặt con trỏ (+) môt iệ ̉m thich hớ p ̣ . 4. Nhấn phim ENTEŔ .
5. Lăp lạ i bƣợ ́c 2 ến 4 ở trên. Để nhập vào iểm
nhƣ trên ta chon bƣợ ́c 2, lâp lạ i bƣợ ́c 3 và 4 môt ̣ cách dễ dàng.
6. Để thoát ra nhấn phim MARḰ .
KIỂ U NHÂP VỊ TRỊ́ BẲ NG L/L: lOMoAR cPSD| 15962736
1. Nhấn phim MARK ế ̉ hiển thi ̣ ENTER MARK menu. Trên L/L vĩ ộ và kinh ộ xuất hiêṇ . 2. Nhâp vạ ̀o vi trị ví ̃ ô. Ṇ
ếu cần thiết, nhấn phim sau âý : - Phím [5] : N - Phím [6] : S
3. Nhâp vạ ̀o kinh ộ . Nếu cần thiết, nhấn phim sau âý : - Phím [7] : E - Phím [8]: W 4. Chọn iểm ánh dấu 5. Nhấn phim ENTEŔ
Nhâp vạ̀o bằng vi trị́ tàu: 1. Nhấn phim VIDEO PLOT́ . 2. Nhấn phim MARḰ 3 .Nhâp vạ̀o chi số̉ 4. Nhấn phim ENTEŔ
Sắp xếp hải ồ:
• Bạn có thể sắp xếp dữ liệu hải ồ và hình ảnh radar bằng cách sử dụng phím ALIGN. 1. Nhấn phim ALIGŃ
2. Dùng chuột ể xắp xếp hải ồ trên radar. 3. Nhấn phim ALIGN ế ̉ óng laị . lOMoAR cPSD| 15962736
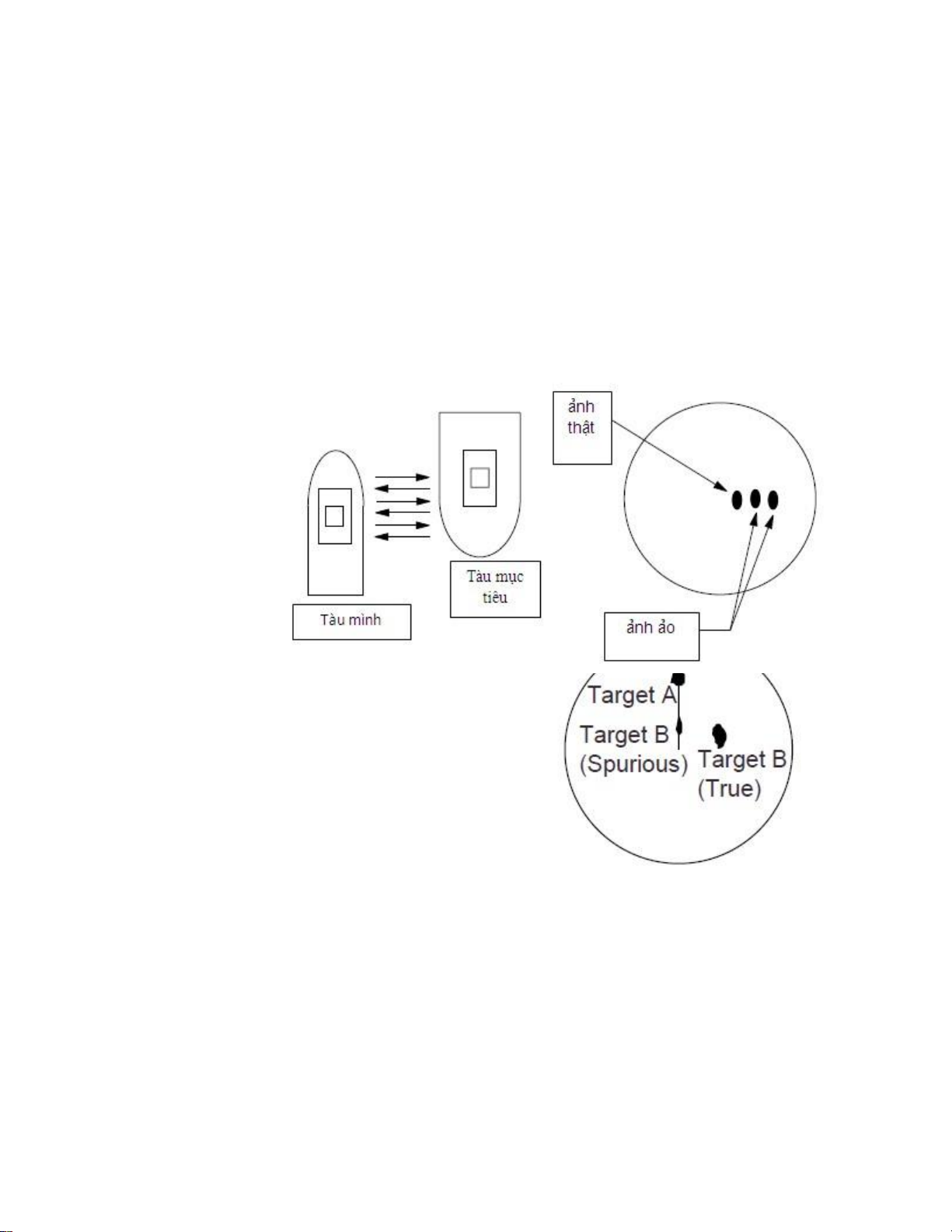
1.37 CHĂN TỊ́N HIÊU DỘI THƢ̣́ HAI
• Tại vị trí xác ịnh , tín hiệu dội lại từ các mục tiêu rất xa có thể xuất hiện là những tín
hiệu ảo trên màn hình . Nó xảy ra khi nhận tín hiệu dội lại và tín hiệu này tiếp tục
truyền i và phản xạ lại nhiều lần , ó là sau khi búp phát kế tiếp radar truyền i. • Để khởi ông hoặ c tắt chế ộ nạ ̀y :
1. Nhấn menu RADAR trên sơ phim ế ̉ hiển thi menu FUNCTIOṆ . 2. Nhấn phim ́
[8] ể lựa chọn mục 8 2ND ECHO REJ. 3. Nhấn lai phị m ́
[8] ể khởi ộng (ON) hoăc dƣ̣ ̀ng khởi ông ̣ (OFF).
4. Nhấn ENTER ể chấp nhân lƣ̣ a chọ ṇ
, ể óng chức năng ta nhấn lại RADAR MENU.
1.38 ĐIỀU CHỈNH ĐÔ SẠ́ NG CỦ A DƢ̃ LIÊU MẠ̀ N HÌNH
• Bạn có thể iều chỉnh ộ sáng của các iểm khác nhau và số liệu ƣa ra theo kiểu số và
chƣ̃ ƣơc hiệ ̉n thi trên mạ ̀n hinh bằng cà
́ch thƣc hiệ n cạ ́c bƣớc sau : 1. Nhấn phim RADAŔ MENU
trên sơ ồ phim ế ̉ hiển thi FUNCTION ̣ menu. 2.
Nhấn phim ́ [9] ể hiển thị menu BRILLIANCE. 3.
Chọn một mục theo ý muốn
bằng cách nhấn phím tƣơng ứng với số
ví dụ nhƣ phím [4] nếu ban muốn thay ̣
ổi ô sáng ̣ vết mục tiêu. 4.
Nhấn lai phị m số giống ớ ̉ trên
nhƣ bạn ã làm ở bƣớc 3 ể lựa chọn. 5.
Nhấn ENTER ể chấp nhâṇ .
Thoát khỏi chức năng nhấn RADAR MENU.
Bảng dƣới ây thể hiện sự iều chỉnh ộ sáng hình ảnh Mục Điều chỉnh ộ sáng lOMoAR cPSD| 15962736 CHAR Giá trị ọc ra MARKS
Vòng phƣơng vị, EBLs, và VRMs TRAILS Vết mục tiêu PANEL Bảng iều khiển + CURSOR Chuột iều khiển (+) PLOT
Đối tƣợng ánh dấu và ánh dấu tự ộng và ánh dấu trong ARPA-25
HDG MARK Đƣờng mũi tàu và sau lái L/L GRID
Vĩ ộ và kinh ộ tùy chọn ở chức năng tự ộng ánh dấu ARPA-25 CHART
Hải ồ tùy chọn ở chức năng tự ộng ánh dấu ARPA-25
1.39 CÀI ĐẶT THÔNG SỐ DÕNG CHẢY
Cài ặt hƣớng trong ó hƣớng dòng chảy có thể nhập bằng 0.1 ộ một. Tốc ộ của thủy
triều có thể ƣợc nhập bằng tay từng 0.1 hải lý/ h.
1. Nhấn RADAR MENU ể hiển thị FUNCTION 1 menu
2. Nhấn phím [8]ể chọn mục 8 SET, DRIFT
3. Nhấn phím [8] ể chọn OFF hoặc MAN
a. OFF: không có iều chỉnh b. MAN: nhập dữ liệu
4. Nếu chọn OFF nhấn ENTER
5. Nếu chọn MAN ở bƣớc 3 yêu cầu nhập SET xxx.x0, nhập dữ liệu vào và
nhấn ENTER . DRIFT xx.x KT. Nhập dữ liệu vào và nhấn ENTER.
6. Nhấn RADAR MENU ể óng chức năng.
1.40 THÔNG TIN HIỂN THỊ BỔ SUNG:
Dữ liệu về gió và thủy triều, ộ sâu có thể hiển thị trong ô văn bản, cái này thƣờng
ƣợc sử dụng ể thể hiện dữ liệu của 3 mục tiêu.
1. Nhấn NAV MENU ể hiển thị NAV INFORMATION 1 menu.
2. Nhấn phím [8] 2 lần ể cài ặt WIND GRAPH ON và nhấn ENTER.
3. Nhấn phím [9] 2 lần ể ặt WIND GRAPH OFF Và nhấn ENTER 4. Làm
tƣơng tự ể chỉ ồ thị của ại dƣơng hiện tại và ộ sâu của hải ồ. Thang
ộ sâu có thể chọn 10, 20, 50, 100, 200 và 500m trên NAV INFORMATION.
5. Nhấn phím [0] 2 lần ể hiển thị NAV INFORMATION 3 menu.
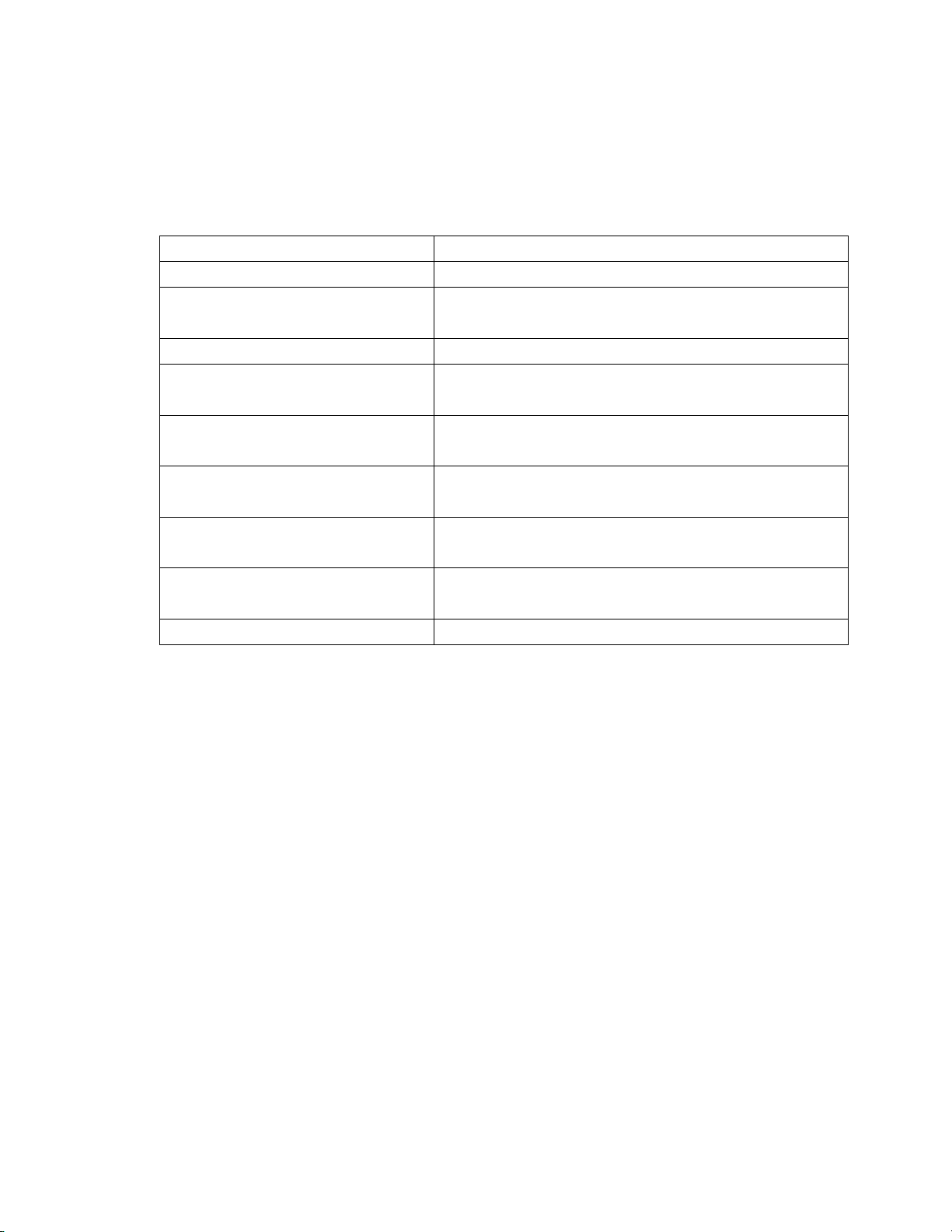
6. Nhấn phím [2] 2 lần và nhấn ENTER ể chọn UTC. 1.41 BÁO ĐỘNG Tình trạng
Báo ộng Báo ộng nhìn thấy Thoát khỏi báo ộng nghe thấy lOMoAR cPSD| 15962736 Lỗi la bàn con quay 2 bíp
Biểu tƣợng HDG ọc ƣợc Thay ổi chế ộ hiển thị
***.* và biểu tƣợng GYRO khi la bàn tín hiệu la
ở góc dƣới bên phải màn bàn vào khôi phục
hình sẽ ỏ lên. Màn hình tự lại. Nếu cần thiết sắp
ộng bật ở chế ộ head-up xếp lại giá trị GYRO trong vòng 1 phút trên màn hình. Sau ó nhấn CANCEL ể xóa i SET HEADING trên màn hình. Báo ộng mục tiêu
Các tiếng Mục tiêu nhấp nháy Nhấn GUARD bíp ALARM Báo ộng trực canh
Các tiếng Biểu tƣợng WATCH ỏ lên và Nhấn AUDIO OFF bíp giá trị 0:00
Vị trí tàu và con trỏ Không ***.*
Chắc rằng vị trí tàu ta ã ƣợc cung cấp từ thiết bị EPFS chƣa. Lỗi hệ thống Không
Dòng chữ BRG SIGNAL Xem công tắc anten ã
MISSING hiện ở bên dƣới ở chế ộ ON chƣa.
màn hình. Không có tín hiệu radar. SYSTEM FAILURE
màu ỏ ở góc dƣới bên trái
màn hình trong lúc kiểm tra thông tin Bấm phím trên bàn 2 Không Thực hiện úng các phím không úng tiến phím. g bíp LOG lỗi 2 bíp
LOG ***.* và biểu tƣợng Nếu SDME bị
LOG trên màn hình màu ỏ, FIELD . thì sử dụng
nếu trong 30 giây không có sổ maanual speed
tín hiệu về tốc ộ vào trong khi mode hoặc ổ cắm
tốc ộ tàu có thể lớn hơn 5 vào thích hợp knots. AZIMUTH 1 bíp Màu ỏ Khi tín hiệu ầu vào HDG nhập vào TRIG VIDEO Chƣơng 2 lOMoAR cPSD| 15962736
VẬN HÀNH CHỨC NĂNG ARPA 2.1 TỔNG QUAN:
FAR-2805 series với mạch ARP-25 cung cấp ầy ủ chức năng ARPA (hệ thống tự ộng ồ giải
radar) theo tiêu chuẩn của IMO A.823 cũng nhƣ tiêu chuẩn của radar thi hành trong
MSC.64 (67) Annex 4 Thông số kỹ thuật cơ bản:
Thu nhận thông tin và theo dõi tự ộng thu nhận thông tin lên ến 20 mục tiêu cộng với thu
nhận 20 mục tiêu bằng tay, hoặc theo dõi bằng tay với 40 mục tiêu giữa 0.1 và 32nm (0.1
và 24 nm tùy theo cài ặt ban ầu)
Sự theo dõi tự ộng tất cả các mục tiêu giữa 0.1 và 32 hải lý (0.1 và 24hải lý tùy theo cài ặt ban ầu)
Chiều dài vector: 30 giây, 1, 2, 3, 6, 12, 15, 30 phút
Định hƣớng: tốc ộ thật hoặc vận tốc tƣơng ối
Hƣớng chuyển ộng: hiển thị trong phạm vi 20 lần quét, hoàn toàn chính xác trong 60 lần
quét sau khi dò sóng.
Vị trí cũ : lựa chọn 5 hoặc 10 vị trí cũ tại cự li 30 giây, 1, 2, 3 hoặc 6 phút
Báo ộng: Sự cảnh báo bằng thị giác và thính giác chống lại các mục tiêu trong giới hạn
CPA/TCPA, mất mục tiêu, mục tiêu i qua báo vùng cảnh báo, hệ thống hỏng và tình trạng ầy mục tiêu.
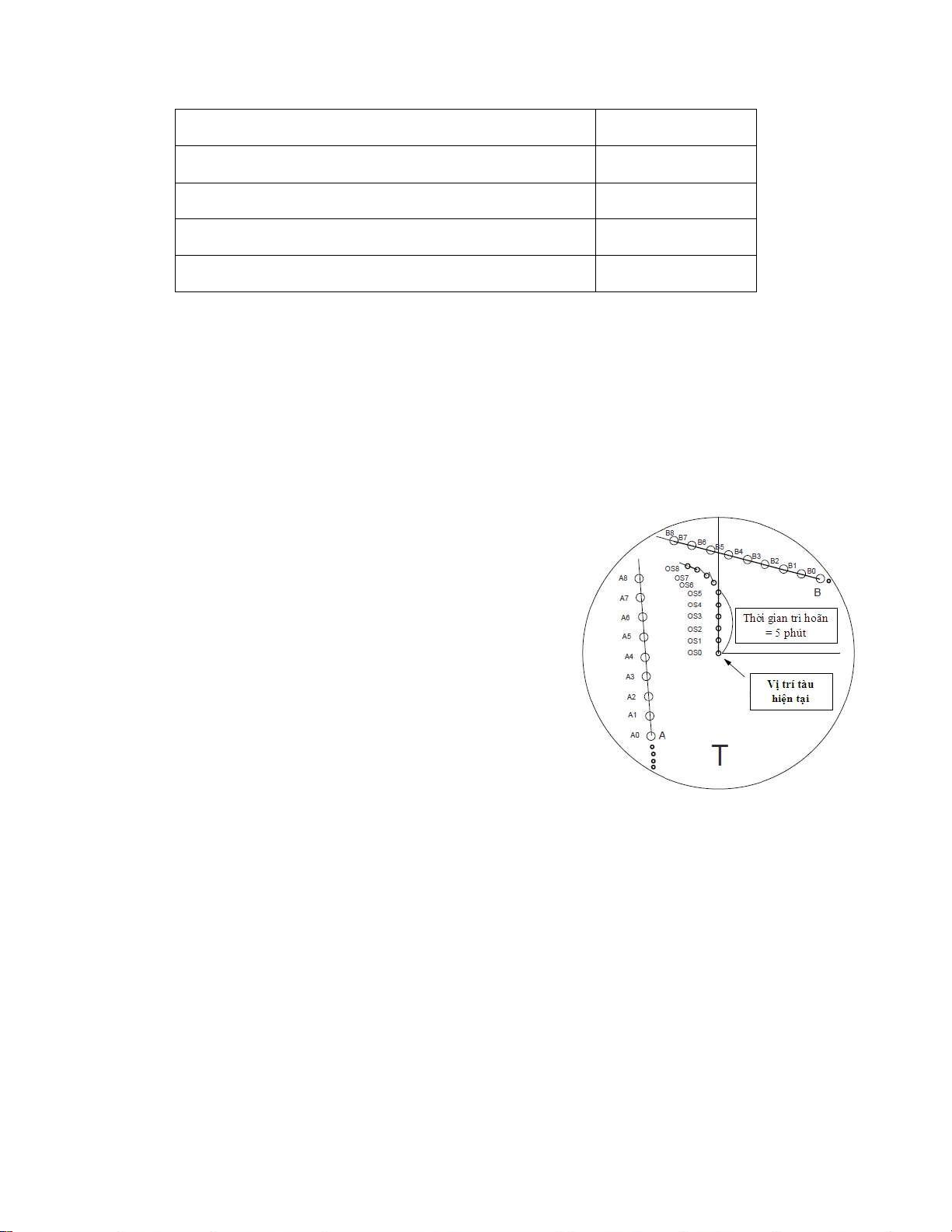
Điều ộng thử: Dự báo tình huống xuất hiện trong 1 phút sau khi lực chọn ộ trễ (1-60 phút)
2.2. CÁC PHÍM SỬ DỤNG CHO ARPA
Đồ giải tự ộng sử dụng phím trên bảng phím ồ giải ở bên phải của màn hình và hai phím
trên bảng iều khiển. Dƣới ây là những mô tả ngắn gọn của những khóa này:
• CANCEL: Kết thúc theo dõi của một mục tiêu ơn bằng con trỏ nếu nhấn và thả
phím . Nếu nhấn và giữ phím khoảng 3 giây, sự theo dõi tất cả mục tiêu kết thúc.
• ENTER: xác nhận của các lựa chọn trong menu
• VECTOR TRU/REL: chọn biểu diễn vector thật hoặc tƣơng ối của mục tiêu. lOMoAR cPSD| 15962736
• VECTOR TIME: chọn chiều dài vector 30 giây, 1, 2, 3, 6, 12, 15 hoặc 30 phút.
• TARGET DATA: Hiển thị dữ liệu của một mục tiêu ƣợc theo dõi bằng con trỏ.
• TARGET BASED SPEEP: tốc ộ tàu ƣợc o tƣơng ối so với mục tiêu cố ịnh.
AUTO PLOT: kích hoạt hoặc không kích hoạt chức năng ARPA.
• TRIAL: Chỉ ra kết quả của tốc ộ tàu và hƣớng i chống lại tất cả các mục tiêu theo dõi.
• LOST TARGET: tắt bỏ báo ộng mục tiêu mất nghe ƣợc và xóa mục tiêu bị mất.
• HISTORY: chỉ ra và xóa những mục tiêu theo dõi cũ.
• ACQ: yêu cầu một mục tiêu bằng tay
• AUDIO OFF: tắt báo ộng nghe ƣợc
2.3. VẬN HÀNH MENU ARPA
Tham số khác nhau cho Auto Plotter ƣợc thiết lập trên ARPA 1 và ARPA 2 menu. Để làm
iều này, làm theo những bƣớc chỉ dẫn bên dƣới: lOMoAR cPSD| 15962736
1. Nhấn AUTO PLOT nếu Auto Plot vẫn chƣa hoạt
ộng. Chú ý rằng dòng chữ ARPA xuất hiện phía
trên bên phải hộp trên màn hình
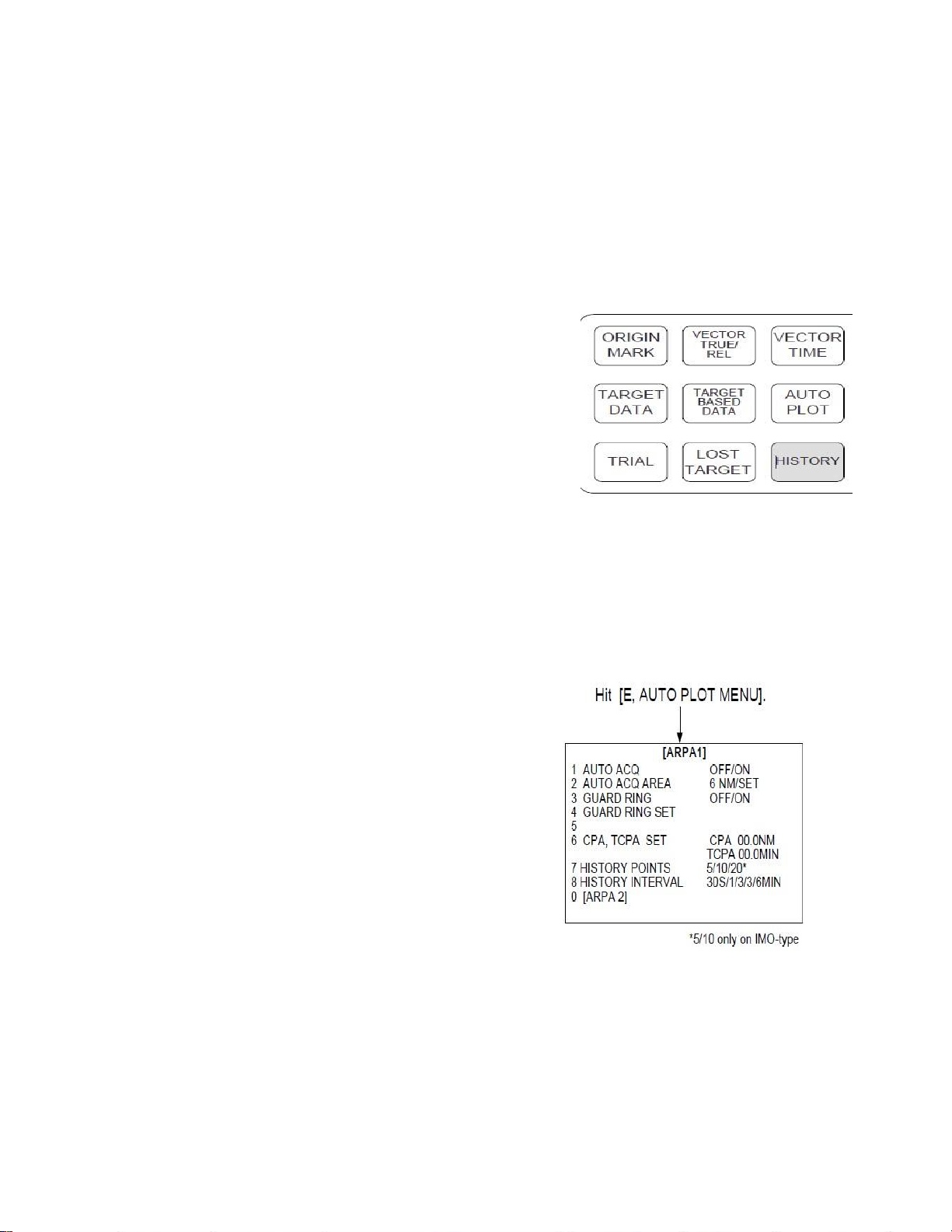
2. Nhấn E, AUTO PLOT MENU ể hiện ra menu APRA 1.
3. Nhấn [0] một lần nếu muốn chuyển qua menu ARPA 2.
4. Chọn mục mong muốn bằng nhấn số tƣơng ứng
5. Chọn một menu bằng cách nhấn phím số nhƣ nhấn
trong bƣớc 3 ở trên. Nếu có nhiều hơn một lựa
chọn trong mục menu hiện tại, có lẽ bạn cần nhấn
phím số vài giây. Nhấn cho ến khi sự lựa chọn yêu
cầu ƣợc nêu ra. ( chú ý là mục menu tất nhiên sẽ
gợi ý bạn ể vào dữ liệu số hoặc xác ịnh những iểm
trên màn hình radar với chuột.
6. Nhấn ENTER ể xác nhập cài ặt.
7. Nhấn E, AUTO PLOT MENU ể kết thúc menu.
2.4. QUI TRÌNH KHỞI ĐỘNG Khởi ộng ARPA Để khởi ộng ARPA:
1. Điều chỉnh A/C Rain, A/C SEA và GAIN cho phù hợp với hình ảnh hiển thị radar.
2. Nhấn AUTO PLOT. Dòng chữ ARPA xuất hiến trên hộp phía trên bên phải màn hình
Nhập tốc ộ của tàu ta: lOMoAR cPSD| 15962736
ARPA yêu cầu dữ liêu tốc ộ và hƣớng của tàu ta. Nghĩa là dữ liệu tốc ộ có thể ƣợc
nhập tự ộng từ máy o tốc ộ, các phƣơng tiện trợ giúp cho hàng hải hoặc bằng tay
qua các phím số hoặc việc lựa chọn tham khảo các mục tiêu (nhƣ là phao hoặc mục
tiêu nhô lên tại chỗ khác).
Nhập tốc ộ tự ộng (Nối với máy o tốc ộ)
1. Nhấn RADAR MENU ể hiện menu FUNCTIONS 2. Nhấn phím (6) ể chọn mục 6 SHIP’S SPEED
3. Nhấn phím (6) ể lựa chọn mục LOG
4. Nhấn ENTER ể kết thúc lựa chọn sau ó nhấn RADAR MENU ể óng menu
FUNTION. Tốc ộ của tàu hiển thị trên ầu màn hình chỉ ra tốc ộ của chính tàu ta cung
cấp từ máy o tốc ộ ƣợc hiển thị bởi dòng chữ LOG
5. Khi biểu ồ tốc ộ ƣợc dùng, chọn tốc ộ mẫu của SEA hoặc GND (ground) trên meu ARAP 2 Chú ý: lOMoAR cPSD| 15962736
1. Nghị quyết IMO A 823:1995 về ARPA khuyến cáo rằng một máy o tốc ộ là mặt bằng
chung với một ARPA nên có khả năng cung cấp bởi dữ liệu tốc ộ dƣới nƣớc hơn là trên bờ.
2. Chắc chắn không chọn LOG khi máy o tốc ộ không kết nối. Nếu tín hiệu LOG không
ƣợc cung cấp thì tốc ộ tàu hiển thị trên ầu màn hình sẽ bị bỏ trống. Trong trƣờng
hợp LOG sai, bạn có thể tiếp tục ồ giải bằng cách ghi tốc ộ bằng tay.
3. Nếu khoảng dừng tín hiệu LOG trở nên nhiều hơn 30 giây với tốc ộ tàu 5KT hoặc
hơn, RADAR xem nhƣ máy o tốc ộ ở trong trạng thái hƣ và LOG FAIL xuất hiện,
ọc xx-x KT. Cho R-type nếu hiện tại không có ầu vào tốc ộ trong khoảng 3min tại
dƣới 0.1 KT, RADAR xem nhƣ LOG hƣ.
Nhập tốc ộ bằng tay
Để nhập tốc ộ tàu bằng tay với phím số:
1. Nhấn MENU RADAR ể hiển thị ra menu FUNTTIONS
2. Nhấn (6) ể chọn biểu tƣợng 6 SHIP’S SPEED
3. Nhấn (6) ể lựa chọn MAN
4. Nhấn ENTER ể kết thúc lựa chọn. Tại iểm này, “MAN=xx.x KT” xuất hiện bên dƣới menu FUNCTION.
5. Ghi tốc ộ tàu bằng cách nhấn tƣơng ứng với phím số theo cách phím ENTER không
ƣợc bỏ sót số 0. Nhƣ ví dụ, nếu con tàu chạy tốc ộ 8KT, nhấn [0][8][ENTER]. Với
4.5KT nhấn [0][4][5][ENTER].
6. Nhấn nút RADAR MENU ể óng menu chức năng. Tốc ộ của tàu hiển thị trên ầu
màn hình chỉ ra tốc ộ tàu ta bạn ã ghi vào trƣớc bằng tên “MANU”.
Tốc ộ dựa vào mục tiêu
Tốc ộ dựa vào mục tiêu ƣợc khuyên dùng khi:
1. Máy o tốc ộ khai thác không chính xác hoặc không ƣợc kết nối với radar.
2. Tàu không có thiết bị mà có thể o sự di chuyển của tàu ở dƣới gió mặc dù sự di
chuyển này không thể ƣợc chú ý tới.
Nếu chọn tốc ộ dựa vào mục tiêu thì AUTO PLOTTER sẽ tính toán tốc ộ tƣơng ối của tàu
ta tới 1 mục tiêu tham khảo cố ịnh. Thiết lập: lOMoAR cPSD| 15962736
1. Chọn một hòn ảo nhỏ hay bất kì iểm nào nhô lên RADAR vị trí tại 0.2 tới 24 NM từ tàu ta.
2. Dùng con trỏ (+) ặt một vị trí trên mục tiêu
3. Nhấn nút TARGET BASED SPEED. Xem mục tiêu ánh dấu xuất hiện tại vị trí con
trỏ và tên dữ liệu tàu ta thay ổi từ LOG or NAV or MANU sang REF. Chú ý ều này
mất một phút trƣớc khi tốc ộ mới ƣợc hiển thị. Chú ý:
1. Khi mục tiêu tham khảo bị mất hoặc i ra ngoài tầm dò sóng thì iểm mục tiêu tham
khảo nhấp nháy và tốc ộ ọc “xx.x”. Chọn mục tiêu tham khảo khác trong hộp.
2. Khi tất cả các mục tiêu bị xóa , iểm mục tiêu cũng bị xóa và target based speed trở
nên không có hiệu lực. Tốc ộ ƣợc chỉ ra phía dƣới cùng ( SOG)
3. Vector của mục tiêu tham khảo có thể ƣợc hiển thị bởi menu khai thác (AUTO PLOT 1 MENU
Bỏ tốc ộ dựa vào mục tiêu:
Nhấn nút TARGET BASED SPEED.Tốc ộ ƣợc chỉ bởi LOG, NAV or MANUAL ƣợc chọn
lại (NAV chỉ có trong R-type). TẮT ARPA:
Để ARPA không hoạt ộng nhấn nút AUTO PLOT. Kí hiệu vẽ mục tiêu và tên trên màn hình sẽ biến mất.
Chú ý: Ngay cả khi ARPA tắt, vết mục tiêu vẫn còn di chuyển cho ến khi radar tắt.
2.5 TỰ ĐỘNG DÒ SÓNG:
ARPA có thể thu ƣợc 40 mục tiêu (20 mục tiêu dò tự ộng và dò tay hay 40 mục tiêu
dò tay). Nếu AUTO ACQ ƣợc chọn sau khi hơn 20 mục tiêu thu ƣợc bằng tay, chỉ những
mục tiêu có khả năng thu nhận còn lại có thể thu ƣợc tự ộng. Ví Dụ, khi 30 mục tiêu thu
ƣợc bằng tay, Sau ó ARPA ƣợc chuyển qua AUTO ACQ. Chỉ có 10 mục tiêu thu ƣợc tự
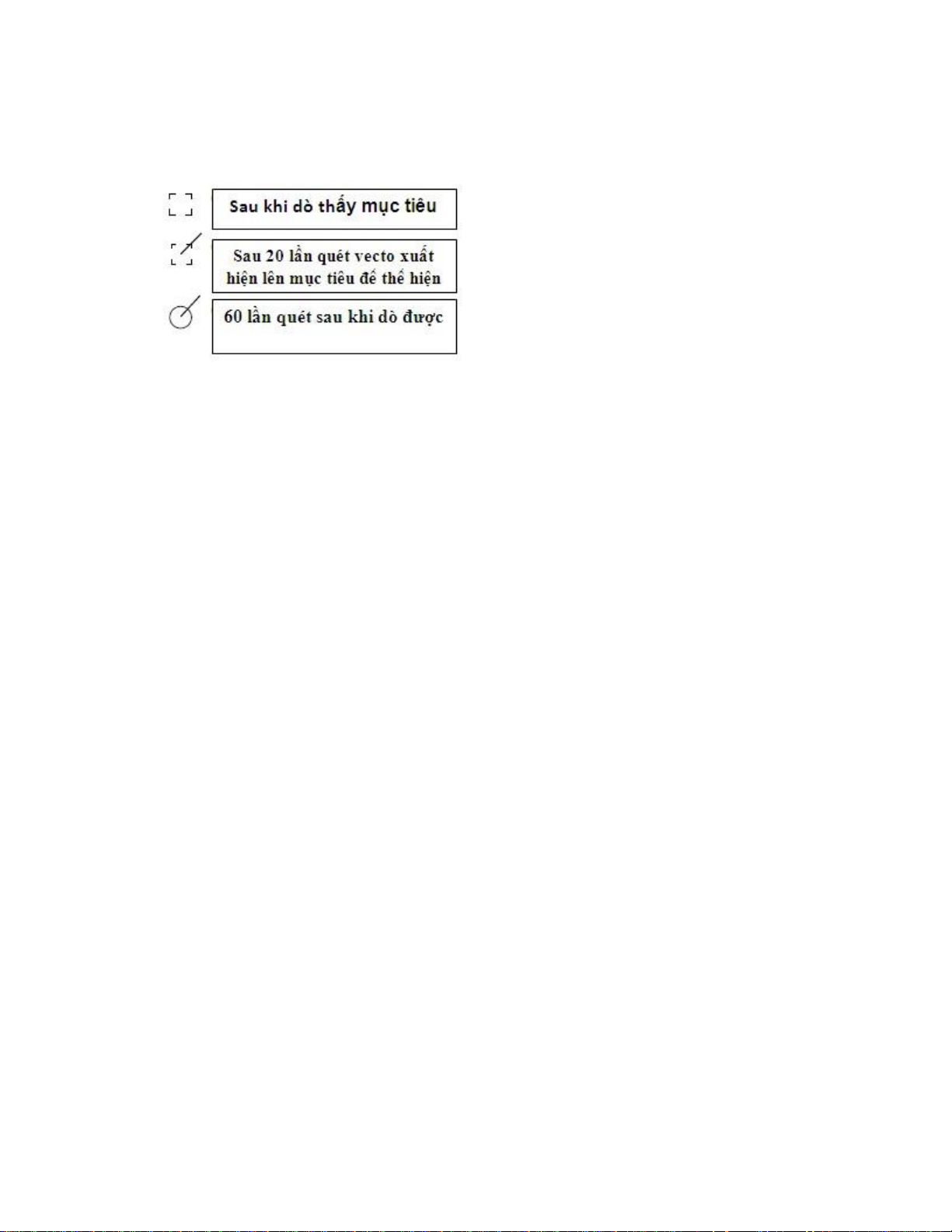
ộng. Một mục tiêu mới thu ƣợc tự ộng ƣợc ánh dấu bởi 1 hình vuông ứt quãng và 1 vector
xuất hiện khoảng 1 phút sau khi dò tự ộng cho biết phƣơng hƣớng chuyển ộng của mục
tiêu. 3 phút sau khi dò tự ộng, giai oạn theo dõi ban ầu kết thúc và mục tiêu trở lên sẵn sàng
theo dõi ổn ịnh. Tại iểm này, dấu hình vuông ứt quãng thay ổi thành một khối tròn. (Những
mục tiêu tự ộng thu ƣợc ƣợc phân biệt với mục tiêu bằng tay bởi kí hiệu in ậm.)
Kich hoạt và không kích hoạt dò tự ộng
1. Nhấn E,AuTO PLOT nếu ARPA chƣa ƣợc kích hoạt. Chú ý rằng tên ARPA xuất
hiện trong hộp phía trên bên phải màn hình.
2. Nhấn nút E,AUTO PLOT ể chỉ ra menu ARPA 1 lOMoAR cPSD| 15962736
3. Nhấn nút [1] ể chọn mục AUTO ACQ
4. Sau ó nhấn [1] ể chọn ON (kích hoạt dò tự ộng ) OFF (bỏ dò tự ộng) cho thích hợp.
5. Nhấn ENTER ể kết thúc sự lựa chọn sau bằng nút E,AUTO PLOT MENU ể óng
menu AUTO PLOT.Chú ý rằng tên AUTO + MAN sẽ hiển thị trong hộp ở phía trên
bên phải màn hình khi dò sóng tự ộng ƣợc kích hoạt; MAN khi dò tự ộng không ƣợc kích hoạt.
Chú ý: Khi ARPA thu ƣợc 20 mục tiêu tự ộng, Tin nhắn AUTO TARGET
FULL sẽ xuất hiện trong hộp bên tay phải màn hình. Cài
ặt khu vực dò sóng
Để thay cho những ƣờng giới hạn,vùng dò sóng tự ộng ƣợc cung cấp trong hệ thống. Có 2 cách cài ặt:
3; 6NM: 2 thiết lập vùng dò sóng tự ộng ban ầu, 1 là giữa 3.0 và 3.5 nm và 2 là giữa 5.5 và 6.0 nm.
SET: khu vực dò sóng tự ộng là 2 hình quạt hoặc 1 vòng tròn sử dung bằng chuột. Cài
ặt khu vực dò sóng tự ộng 3 và 6 nm
Để kích hoạt 2 thiết lập ban ầu vùng dò sóng
1. Nhấn nút E,AUTO PLOT ể chỉ ra menu ARPA 1
2. Nhấn [2] ể chọn mục AUTO ACQ AREA
3. Tiếp ó nhấn [2] ể chọn mục lựa chọn 3, 6NM
4. Nhấn ENTER ể xác nhận sự lựa chọn của bạn sau
ó nhấn nút E,AUTO PLOT MENU ể óng ARPA 1 menu.
Minh họa dƣới ây chỉ ra thế nào là hiển thị vùng dò sóng
tự ộng trên màn hình. Trên20 mục tiêu vùng dò sóng tự ộng thu ƣợc tự ộng.
Nếu 30 mục tiêu ã thu ƣợc bằng tay trong chế ộ MAN ACQ (AUTO OFF trong ARPA
1) chỉ có 10 mục tiêu có thể thu ƣợc tự ộng.
Cài ặt vùng dò sóng tự ộng bằng chuột
1. Nhấn nút E,AUTO PLOT ể chỉ ra ARPA 1 menu
2. Nhấn [2] chọn AUTO ACQ AREA
3. Hơn nữa nhấn [2] ể chọn SET
4. Nhấn ENTER ể kết thúc lựa chọn của bạn. Tại ây menu AUTO ACQ SETTING sẽ
hiển thị ở cuối màn hình.
5. Nhấn [2] ể chọn mục 2 [1/2] và nhấn ENTER. Sau ó bạn sẽ xem tin nhắn hiển thị bên dƣới. lOMoAR cPSD| 15962736
6. Di chuyển con chỏ phía ngoài ngƣợc chiều kim ồng hồ góc trong phạm vi góc ( iểm A) và nhấn ENTER.
7. Di chuyển con trỏ theo chiều kim ồng hồ ến iểm cần dò (iểm B) và nhấn ENTER.
Chú ý: Nếu bạn muốn tạo một khu vực dò sóng tự ộng 360 ộ quanh tàu, cài ặt iểm B gần
nhƣ ịnh hƣớng giống iểm A và ấn ENTER.
8. Lặp lại bƣớc 5 và 7 ở trên nếu bạn muốn tạo một vùng khác với chuột.
9. Nhấn phím [1] theo sau nút E,AUTO PLOT MENU ể óng menu ARPA 1 Một vùng
dò sóng tự ộng giống nhƣ ví dụ trên xuất hiện trên màn hình hiển thị. Chú ý mỗi
vùng có 1 bán kính cố ịnh 0.5nm.
Chú ý rằng khu vực dò sóng tự ộng ƣợc duy trì ở trong bộ nhớ của ARPA ngay cả khi dò
sóng tự ộng không ƣợc kích hoạt hay ARPA bị tắt.
Chấm dứt theo dõi các mục tiêu
Khi ARPA thu ƣợc 20 mục tiêu tự ộng, tin nhắn AUTO TARGET FULL sẽ hiển thị trong
cái hộp bên tay phải của màn hình và không xuất hiện nhiều hơn trừ khi các mục tiêu mất
i. Bạn có thể tìm thấy tin nhắn này trƣớc khi cái ặt vùng dò sóng tự ộng. Nếu iều này sẽ
xảy hủy bỏ theo dõi các mục tiêu ít quan trọng hoặc thực hiện dò sóng bằng tay.
Mục tiêu riêng lẻ:
Đặt con trỏ (+) lên mục tiêu và nhấn CANCEL ể hủy theo dõi mục tiêu.
Tất cả mục tiêu:
Nhấn và giữ CANCEL hơn 3 giây ể hủy theo dõi tất cả mục tiêu.
2.6 DÒ SÓNG BẰNG TAY
Trong chế ộ dò sóng tự ộng (AUTO ACQ ON), trên 20 mục tiêu có thể truy xuất bằng
tay trong iều kiện ã có 20 mục tiêu ƣợc truy xuất tự ộng. Khi dò sóng tự ộng bị tắt
(AUTO ACQ OFF), trên 40 mục tiêu có thể ƣợc dò bằng tay và theo dõi tự ộng.
Để dò sóng bằng tay các mục tiêu:
1. Đặt dấu nháy (+) lên mục tiêu bằng iều khiển chuột.
2. Nhấn ACQ trên bảng iều khiển. Đối tƣợng theo dõi ƣợc ánh dấu bằng vị trí con trỏ. lOMoAR cPSD| 15962736
Chú ý rằng ối tƣợng ồ giải ƣợc vẽ bằng nét ứt khi theo dõi ban ầu. Vecto xuất hiện
trong khoảng 1 phút sau khi dò ƣợc xu hƣớng chuyển ộng của mục tiêu. Nếu mục
tiêu ƣợc phát hiện liên tục trong 3 phút thì
biểu tƣợng trên mục tiêu ổi thành ƣờng tròn.
Nếu dò mục tiêu bị lỗi thì biểu tƣợng của mục
tiêu ánh dấu nhấp nháy và sẽ mất trong thời gian ngắn. Chú ý
1. Để dò sóng thành công, mục tiêu ƣợc dò nên cách tàu trong phạm vi 0.1-32 hải
lý và không bị che mờ bởi nhiễu biển hoặc nhiễu mƣa.
2. Khi có 40 mục tiêu dò bằng tay, tin nhắn MAN TARGET FULL hiển thị ở cuối
màn hình. Hủy theo dõi các mục tiêu vô hại nếu bạn muốn dò thêm các mục tiêu bằng tay khác.
THAY ĐỔI KÍCH THƢỚC CỦA MỤC TIÊU THEO DÕI
Nhấn 1 biểu tƣợng theo dõi mong muốn, biểu tƣợng ƣợc phóng lớn trong khoảng 7 giây
Bạn có thể chọn kích thƣớc biểu tƣợng. Để chọn kích thƣớc lớn hay chuẩn của tất cả các biểu tƣợng:
1. Nhấn E, AUTO PLOT MENU trên vùng bàn phím sau ó nhấn phím [0] ể hiện ra menu ARPA 2
2. Nhấn phím [3] ể chọn 3 MARK SIZE
3. Sau ó nhấn [3] ể chọn STANDARD hoặc LARGE nhƣ mong muốn.
4. Nhấn ENTER ể kết thúc lựa chọn sau ó nhấn E, AUTO PLOT MENU ể óng menu ARPA 2. lOMoAR cPSD| 15962736
CÁC BIỂU TƢỢNG ARPA lOMoAR cPSD| 15962736
2.8 ĐIỀU CHỈNH ĐỘ SÁNG CỦA CÁC ĐIỂM ĐÁNH DẤU 1. Bấm
RADAR MENU trên bàn phím ể hiển thị menu FUNCTIONS.
2. Bấm [9] ể hiển thị menu BRILLIANCE.
3. Bấm [7] ể chọn 7 PILOT BRILL.
4. Tiếp ó, bấm [7] ể chọn một cấp ộ ánh sáng mong muốn.
5. Bấm ENTER ể xác nhận sự lựa chọn, rồi bấm RADAR MENU ể óng menu FUNCTIONS.
2.9 HIỂN THỊ DỮ LIỆU MỤC TIÊU
Đánh dấu tự ộng tính toán xu hƣớng chuyển ộng (khoảng cách, hƣớng lái, phƣơng, tốc
ộ, CPA và TCPA) của tất cả các mục tiêu ƣợc vẽ.
Trong chế ộ HEAD-UP và hƣớng HEAD-UP TB, phƣơng vị mục tiêu, hƣớng và tốc ộ
của dữ liệu mục tiêu hiển thị ở phía trên bên phải sẽ ở giá trị thật (hậu tố “T”) hoặc tƣơng
ối (hậu tố “R”) ể tàu mình phù hợp với cài ặt vecto thật hay tƣơng ối. Trong chế ộ north-
up, course-up và chuyển ộng thật, vùng dữ liệu mục tiêu luôn luôn hiển thị phƣơng vị thật,
hƣớng thật và tốc ộ thật trên mặt ất.
Đặt con trỏ chuột vào một mục tiêu mong muốn và bấm TARGET DATA trên bàn phím.
Dữ liệu của mục tiêu ƣợc chọn sẽ hiển thị ở góc trên bên phải màn hình.
RNG/BRG (Range/Bearing): Khoảng cách và phƣơng vị từ tàu ến mục tiêu ƣợc chọn
với hậu tố “T” (thật ) hoặc “R” (tƣơng ối).
CSE/SPD (Course/Speed): hƣớng và tốc ộ ƣợc hiển thị cho mục tiêu ƣợc chọn với hậu
tố “T” ( úng) hoặc “R” (tƣơng quan).
CPA/TCPA: CPA (Closest Point of Approach )– Điểm tiếp cận gần nhất là khoảng cách
gần nhất mà mục tiêu sẽ tiếp cận tàu. TCPA là khoảng thời gian của CPA. Cả CPA và
TCPA ều ƣợc tự ộng tính toán. Khi một tàu mục tiêu ã chạy vƣợt qua tàu, CPA sẽ ƣợc
gắn 1 dấu sao, ví dụ nhƣ CPA*1.5NM. TCPA sẽ ƣợc ếm ến 99,9 phút và nếu hơn số ó,
nó sẽ báo TCPA>*99.9MIN. lOMoAR cPSD| 15962736
BCR/BCT: (Bow crossing range) Khoảng cách vƣợt qua mũi tàu là phạm vi một mục
tiêu sẽ vƣợt qua ngay mũi tàu tại một khoảng cách ã ƣợc tính toán. BCT là khoảng thời gian xảy ra BCR.
• RNG: Khoảng cách từ tàu ến mục tiêu
• BRG: Hƣớng lái từ tàu ến mục tiêu ( úng hoặc tƣơng quan)
• CSE: Phƣơng của mục tiêu ( úng hoặc tƣơng quan)
• SPD: Tốc ộ của mục tiêu
• CPA: Điểm tiếp cận gần nhất giữa tàu và mục tiêu
• TCPA: Thời gian tiếp cận gần nhất giữa tàu và mục tiêu
• BCR: Khoảng cách vƣợt qua mũi tàu lOMoAR cPSD| 15962736
2.10 CHẾ ĐỘ HIỂN THỊ VÀ CHIỀU DÀI CỦA CÁC VÉC-TƠ Vec-tơ thật hoặc tƣơng ối
Các véc-tơ mục tiêu có thể ƣợc hiển thị tƣơng ối với hƣớng tàu mình (relative) hoặc tham
chiếu ến phƣơng bắc (true).
Nhấn nút VECTOR TRUE/REL ể chọn các véc-tơ thật hoặc tƣơng ối. Tính năng này áp
dụng ƣợc cho tất cả các chế ộ (la bàn con quay phải ang hoạt ộng chính xác). Chế ộ véc-tơ
hiện thời ƣợc hiển thị ở góc trên bên phải màn hình. Vec-tơ thật
Với các véc-tơ thật, hiển thị radar trong chế ộ head-up sẽ giống hình bên:
Trong chế ộ chuyển ộng thật, tất cả các mục tiêu cố ịnh nhƣ
mặt ất, các iểm hàng hải và các tàu neo vẫn không chuyển
ộng trên màn hình radar với ộ lớn véc-tơ bằng 0. Nhƣng
khi xuất hiện gió hoặc dòng chảy, các véctơ thật hiển thị
trên các mục tiêu cố ịnh sẽ ảnh hƣởng ến tàu mình nên ta
phải cài ặt thông số dòng chảy thích hợp. Véc-tơ tƣơng ối
Với những véc-tơ tƣơng ối, hiển thị radar sẽ giống nhƣ bên:
Những Véc-tơ tƣơng ối trên các mục tiêu mà nó không di
chuyển so với mặt ất nhƣ mặt ất, các iểm hàng hải và các tàu
neo .(Những ƣờng chấm chấm trong hình trên chỉ dùng ể giải thích). Thời gian véc-tơ
Thời gian véc-tơ (hay ộ lớn của các véc-tơ) có thể ƣợc ịnh sẵn là 30 giây, 1, 2, 3, 6, 12, 15
hoặc 30 phút và thời gian véc-tơ ƣợc chọn sẽ hiển thị ở góc trên bên phải màn hình.
Bấm nút VECTOR TIME ể chọn thời gian vectơ mong muốn. Mũi vecto cho biết một vị
trí ƣớc lƣợng của mục tiêu sau khi thời gian vectơ ã chọn chấm dứt. Điều này rất hữu ích
ể kéo dài ộ lớn vectơ nhằm ƣớc tính nguy cơ âm va với bất kỳ mục tiêu nào. lOMoAR cPSD| 15962736
2.11 HIỂN THỊ VỊ TRÍ CŨ
ARPA hiển thị những chấm cách ều nhau về thời gian ánh dấu những vị trí quá khứ
của bất kỳ mục tiêu nào ƣợc theo dõi.
Một chấm mới ƣợc thêm vào mỗi phút (hoặc tại các khoảng thời gian ịnh trƣớc)
cho ến khi ạt ến con số ã ịnh. Nếu 1 mục tiêu thay ổi tốc ộ của nó, Khoảng cách giữa các
chấm sẽ không ều nhau. Nếu nó thay ổi hƣớng thì hƣớng ƣợc vẽ sẽ không là 1 ƣờng thẳng.
Hiển thị và xóa các vị trí cũ
Để hiển thị các vị trí cũ, bấm nút HISTORY ể hiển thị
các vị trí cũ của những mục tiêu ƣợc theo dõi. Ký hiệu
HISTORY xuất hiện ở góc trên bên phải màn hình.
Để xóa các vị trí cũ, bấm nút HISTORY 1 lần nữa. Chọn
những số lƣợng dấu chấm và khoảng thời gian ánh dấu vị trí cũ
1. Bấm E, AUTO PLOT MENU trên bàn phím ể hiển thị menu ARPA .
2. Bấm [7] ể chọn mục HISTORY POINTS.
3. Tiếp ó, bấm [7] ể chọn số những vị trí quá khứ mong muốn (5, 10, 20, 30, 100, 150
hoặc 200). Trong IMO-type chỉ có thể chọn 5 hoặc 10.
4. Bấm ENTER ể xác nhận lựa chọn.
5. Bấm [8] ể chọn HISTORY INTERVAL.
6. Tiếp ó, bấm [8] ể chọn khoảng cách các vị trí
cũ mong muốn (30 giây, 1, 2, 3 hay 6 phút).
7. Bấm ENTER ể kết thúc lựa chọn.
8. Bấm E, AUTO PLOT MENU ể óng menu.
2.12 CÀI ĐẶT NHỮNG VÙNG BÁO ĐỘNG CPA/TCPA
ARPA tiếp tục ƣa ra khoảng cách dự oán về CPA và thời gian dự oán xảy ra CPA
(TCPA) của mỗi mục tiêu ã xác ịnh ến tàu. lOMoAR cPSD| 15962736
Khi dự oán CPA của bất kỳ mục tiêu nào nhỏ hơn khoảng báo ộng CPA và TCPA dự
oán nhỏ hơn giới hạn báo ộng TCPA, ARPA sẽ báo ộng âm thanh và hiển thị dấu hiệu cảnh
báo COLLISION ( âm va) trên màn hình. Bên cạnh ó, biểu tƣợng ARPA thay ổi thành 1
hình tam giác và nhấp nháy cùng với véc-tơ của nó.
Với iều kiện là tính năng này ƣợc sử dụng chính xác, nó sẽ giúp tránh ƣợc nguy cơ
âm va bằng cách cảnh báo những mục tiêu nguy hiểm. Nó rất quan trọng trong việc iều
chỉnh GAIN, A/C SEA, A/C RAIN và các iều chỉnh khác trong radar thích hợp ể khỏi nhầm lẫn.
Những khoảng báo ộng CPA/TCPA phải ƣợc cài ặt chính xác với sự thích hợp về kích
thƣớc, trọng tải, tốc ộ, biểu hiện thay ổi và những ặc iểm khác của tàu. CAUTION – CHÚ Ý
Tính năng báo ộng CPA/TCPA sẽ không bao giờ có thể tin cậy nếu dựa trên những phƣơng
tiện ộc lập trong việc phát hiện nguy cơ âm va. Nhà hàng hải có trách nhiệm phải dùng trực
quan quan sát ể tránh âm va, dù cho radar hay những thiết bị viện trợ có hoạt ộng hay không.
Để cài ặt khoảng báo ộng CPA/TCPA:
1. Bấm E, AUTO PLOT MENU trên bàn phím ể hiển thị menu ARPA 1.
2. Bấm [6] ể chọn mục 6 CPA, TCPA SET. Lúc này, 1 dấu nháy sẽ xuất hiện tại "CPA x.xNM".
3. Chọn khoảng báo ộng CPA bằng hải lý (lớn nhất là 9,9 nm) không bỏ sót số 0 ở ầu,
nếu có, bấm ENTER. Dấu nháy sẽ chuyển ến vùng "TCPA xx.xMIN".
4. Chọn giới hạn báo ộng TCPA bằng phút (lớn nhất là 99 phút) không bỏ qua số 0 ở ầu, nếu có, bấm ENTER.
5. Bấm E, AUTO PLOT MENU ể óng menu.
Tắt âm báo ộng CPA/TCPA
Bấm nút AUDIO OFF ể nhận biết và tắt âm báo ộng CPA/TCPA.
Dấu hiệu cảnh báo COLLISION, biểu tƣợng hình tam giác và véc-tơ nhấp nháy sẽ vẫn hiển
thị trên màn hình cho ến khi qua khỏi tình trạng nguy hiểm hoặc bạn cố ý chấm dứt theo
dõi mục tiêu bằng cách sử dụng nút CANCEL. lOMoAR cPSD| 15962736
2.13 CÀI ĐẶT MỘT VÙNG CẢNH BÁO
Khi 1 mục tiêu i qua vùng cảnh báo ã ƣợc cài ặt, những âm thanh vang lên và chỉ
thị GUARD RING sẽ xuất hiện ở cuối màn hình. Mục tiêu gây ra cảnh báo sẽ ƣợc chỉ rõ
với 1 hình tam giác lật ngƣợc nhấp nháy. CAUTION – CHÚ Ý
Vùng cảnh báo sẽ không bao giờ có thể tin cậy nếu dựa trên những phƣơng tiện ộc lập trong
việc phát hiện nguy cơ âm va. Nhà hàng hải có trách nhiệm phải dùng trực quan quan sát ể
tránh âm va, dù cho radar hay những thiết bị viện trợ có hoạt ộng hay không.
Khởi ộng vùng cảnh báo (Guard Zone)
Vùng cảnh báo số 1 thực hiện ƣợc giữa 3 và 6nm với một ộ sâu cố ịnh 0,5nm. Vùng cảnh
báo số 2 có thể ƣợc cài ặt ở bất cứ âu khi vùng cảnh báo số 1 có hiệu lực.
Để cài ặt và khởi ộng vùng cảnh báo:
1. Bấm E, AUTO PLOT MENU trên bàn phím ể hiển thị menu ARPA
2. Bấm [3] ể chọn mục 3 GUARD RING.
3. Tiếp ó, bấm [3] ể chọn ON ể khởi ộng vùng cảnh báo.
4. Bấm ENTER ể kết thúc lựa chọn.
5. Bấm [4] ể chọn GUARD RING SET. Lúc này, menu GUARD SETTING sẽ hiển thị ở cuối màn hình.
6. Bấm [2] và ENTER (nhấn phím [2] 2 lần khi cài ặt vùng cảnh báo số 2
7. Tham khảo hình minh họa bên dƣới, ặt dấu nháy ở góc ngoài bên trái của vùng ( iểm A) và bấm ENTER. lOMoAR cPSD| 15962736
8. Đặt ấu nháy ở bên phải của vùng ( iểm B) và bấm ENTER. Chú ý: Nếu muốn tạo một
vùng báo ộng bao phủ 3600 xung quanh tàu, ặt iểm B ở gần nhƣ cùng hƣớng (xấp xỉ
±30) với iểm A và bấm ENTER.
9. Bấm [1], rồi bấm E, AUTO PLOT MENU ể óng menu.
Ví dụ về vùng cảnh báo ƣợc chỉ ra ở hình bên. Chú
ý rằng là vùng cảnh báo có 1 ộ rộng bán kính cố ịnh là
0,5nm. Dấu hiệu GZ hiển thị trong hộp ở góc trên bên phải
màn hình khi vùng cảnh báo ƣợc kích hoạt.
Tắt vùng cảnh báo
1. Bấm E, AUTO PLOT MENU trên bàn phím ể hiển thị menu ARPA 1.
2. Bấm [3] ể chọn mục GUARD RING.
3. Tiếp ó, bấm [3] ể chọn OFF ể tắt vùng cảnh báo.
4. Bấm ENTER ể kết thúc lựa chọn, sau ó bấm E, AUTO PLOT MENU ể óng menu ARPA 1.
Tắt âm vùng cảnh báo nghe thấy ƣợc
Bấm nút AUDIO OFF ể nhận biết và tắt âm báo ộng. 2.14 CÁC CHÚ Ý
Có 6 trƣờng hợp chính là nguyên nhân của việc chức năng tự ộng theo dõi mục tiêu
báo ộng bằng trực quan và thính giác: • Báo ộng CPA/TCPA
• Báo ộng vùng cảnh báo
• Báo ộng mục tiêu biến mất • Báo ộng ầy mục tiêu dò bằng tay.
• Báo ộng ầy mục tiêu dò tự ộng.
• Những lỗi hệ thống
Báo ộng âm thanh có thể ƣợc cài ặt OFF thông qua menu AUTO PLOT 2. lOMoAR cPSD| 15962736 Báo ộng CPA/TCPA
Báo ộng trực quan và thính giác ƣợc hình thành khi CPA và TCPA dự oán của bất kỳ mục
tiêu nào nhỏ hơn giới hạn cài ặt.
Bấm nút AUDIO OFF ể nhận biết và tắt âm báo ộng CPA/TCPA. Báo ộng GUARD ZONE
Báo ộng trực quan và thính giác ƣợc hình thành khi 1 mục tiêu i qua vùng cảnh báo ã ƣợc cài ặt.
Bấm nút AUDIO OFF ể nhận biết và tắt âm báo ộng.
Báo ộng mục tiêu biến mất
Khi hệ thống phát hiện 1 mục tiêu biến mất, biểu tƣợng mục tiêu trở thành 1 hình kim
cƣơng nhấp nháy và dòng chữ LOST TARGET xuất hiện ở cuối màn hình. Cùng lúc ó, âm
báo sẽ báo ộng trong 1 giây.
Bấm LOST TARGET ể nhận biết báo ộng mục tiêu biến mất. Sau ó, các ánh dấu mục tiêu biến mất.
Báo ộng ầy mục tiêu
Khi bộ nhớ ầy, tình trạng ầy bộ nhớ ƣợc chỉ ra và kèm theo tiếng “bíp” ngắn.
CÁC MỤC TIÊU DÒ BẰNG TAY
Dấu hiệu "MAN TARGET FULL" xuất hiện ở cuối màn hình và tiếng “bíp” ngắn khi số
mục tiêu dò bằng tay ạt ến 20 hoặc 40 tùy theo dò mục tiêu tự ộng có ƣợc kích hoạt hay không.
CÁC MỤC TIÊU DÒ TỰ ĐỘNG
Dấu hiệu "AUTO TARGET FULL" xuất hiện ở cuối màn hình và tiếng “bíp” ngắn khi số
mục tiêu dò tự ộng ạt ến 20 mục tiêu. Báo ộng lỗi hệ thống
Khi mạch ARP không nhận ƣợc tín hiệu nhập vào từ radar hoặc thiết bị bên ngoài, màn
hình hiển thị "SYSTEM FAIL" và chỉ ra thiết bị nào bị lỗi cũng nhƣ phát ra âm báo ộng.
Những dấu hiệu thiếu ƣợc chỉ ra nhƣ hình dƣới: Mất tín hiệu Chỉ dẫn Tín hiệu máy o tốc ộ LOG lOMoAR cPSD| 15962736 La bàn con quay GYRO
Tín hiệu kích hoạt từ radar T Video từ radar V
Tín hiệu phƣơng vị từ anten radar B Nhóm xung từ anten radar H
2.15 ĐIỀU ĐỘNG THỬ NGHIỆM
Mô phỏng thử nghiệm tác ộng của tất cả các mục tiêu ƣợc theo dõi ến sự iều ộng của tàu
mà không làm gián oạn việc cập nhật thông tin của mục tiêu. Có 2 cách iều ộng thử nghiệm: tĩnh và ộng
Điều ộng thử nghiệm ộng
Một iều ộng thử nghiệm ộng chỉ ra các vị trí dự oán của
các mục tiêu ƣợc theo dõi và tàu. Nhập tốc ộ và hƣớng
của tàu với “thời gian trì hoãn” ã biết. Giả sử rằng tất
cả các mục tiêu ƣợc theo dõi ều giữ nguyên tốc ộ và
hƣớng hiện thời của chúng, những chuyển ộng tƣơng
lai của các mục tiêu và tàu ƣợc mô phỏng trong các quá
trình 1 giây chỉ ra những vị trí dự oán của chúng trong
các khoảng cách 1 phút nhƣ hình minh họa bên dƣới.
Chú ý là một khi 1 iều ộng thử nghiệm ộng ã ƣợc kích
hoạt, thì không thể thay ổi tốc ộ, hƣớng hay thời gian trì hoãn thử nghiệm của tàu cho ến
khi sự iều ộng thử nghiệm này chấm dứt. Điều ộng thử nghiệm tĩnh
Một iều ộng thử nghiệm tĩnh chỉ hiển thị trạng thái cuối cùng của sự mô phỏng. Nếu nhập
vào cùng tốc ộ, hƣớng hay thời gian trì hoãn thử nghiệm dƣới trạng thái nhƣ nhau nhƣ ví
dụ về iều ộng thử nghiệm ộng ã nói ở trên, màn hình sẽ hiển thị ngay vị trí OS7 cho tàu, vị
trí A7 cho mục tiêu A và B7 cho mục tiêu B, chứ không hiển thị những vị trí trung gian.
Vì vậy, iều ộng thử nghiệm tĩnh sẽ tiện lợi khi bạn muốn có kết quả iều ộng ngay lập tức. lOMoAR cPSD| 15962736
Chú ý: Để có sự mô phỏng chính xác về những chuyển ộng của tàu trong iều ộng thử
nghiệm, những ặc tính của tàu nhƣ gia tốc và biểu hiện thay ổi phải ƣợc cài ặt chính xác vào thời iểm lắp ặt.
Để thực hiện 1 iều ộng thử nghiệm:
1. Bấm E, AUTO PLOT MENU trên bàn phím và
sau ó nhấn nút [0] ể hiển thị menu ARPA
2. Bấm [2] ể chọn mục 2 TRIAL MODE.
3. Nhấn tiếp phím [2] ể chọn iều ộng thử nghiệm STATIC hay DYNAMIC.
4. Bấm ENTER ể lựa chọn, và E, AUTO PLOT MENU ể óng menu ARPA 2
5. Bấm VECTOR TRUE/REL ể chọn vec-tơ úng hay tƣơng quan.
6. Bấm TRIAL. Menu TRIAL DATA SETTING sẽ hiển thị phía dƣới màn hình cùng
với dữ kiện về tốc ộ và hƣớng hiện tại của tàu. Chú ý:
Dòng thứ 2 [STATIC MODE] dùng trong trƣờng hợp
iều ộng thử nghiệm tĩnh.
7. Nhập tốc ộ, hƣớng và thời gian trì hoãn ã tính toán của tàu theo cách sau:
Tốc ộ: Đồng bộ với sự kiểm soát của VRM
Phƣơng: Đồng bộ với sự kiểm soát của EBL
Thời gian trì hoãn: Nhập bằng phút bằng cách nhấn vào các nút số. Đây là thời gian
mà sau ó tàu sẽ chuyển sang 1 tình trạng mới, chứ không phải thời gian sự mô phỏng
bắt ầu. Thay ổi thời gian trì hoãn tùy theo iều kiện tải trọng của tàu...
8. Bấm TRIAL 1 lần nữa ể bắt ầu iều ộng thử nghiệm.
Điều ộng thử nghiệm diễn ra trong 3 phút với chữ “T” hiển thị ở phía dƣới màn hình.
Nếu bất kỳ mục tiêu theo dõi nào ƣợc dự oán là sẽ âm va với tàu (nghĩa là tàu mục
tiêu vào trong giới hạn CPA/TCPA ã cài ặt trƣớc), biểu tƣợng mục tiêu sẽ thay ổi thành
hình tam giác và nhấp nháy. Nếu iều ó xảy ra, phải thay ổi tốc ộ, phƣơng và thời gian
trì hoãn thử nghiệm của tàu ể ạt ƣợc 1 iều ộng an toàn. Điều ộng thử nghiệm sẽ tự ộng
chấm dứt và hình ảnh radar bình thƣờng sẽ ƣợc hiển thị lại sau 3 phút.
Chấm dứt iều ộng thử nghiệm
Bấm TRIAL 1 lần nữa vào bất cứ thời iểm nào. lOMoAR cPSD| 15962736
2.16 KIỂM TRA CHỨC NĂNG THEO DÕI ARPA (ARPA track test)
Chƣơng trình kiểm tra ƣợc cung cấp ể ánh giá hiệu của ARPA. Chú ý là trong suốt quá
trình kiểm tra, 1 hoạt ộng bình thƣờng bị gián oạn và dấu hiệu “XX” xuất hiện ở phía dƣới
màn hình. Quá trình kiểm tra có thể ƣợc chấm dứt bất cứ lúc nào.
Để thực hiện ARPA track test:
1. Chọn chế ộn hiển thị north-up trên thang tầm xa 12 hải lý.
2. Nhập tốc ộ bằng tay của 0 knots.
3. Bấm E, AUTO PLOT MENU trên bàn phím và nút [0] ể hiển thị menu ARPA 2.
4. Bấm [9] chọn ARP TRACK TEST. Một hình ảnh track test sẽ xuất hiện trên màn hình. 5. Bấm ENTER.
6. Sẽ mất khoảng 3 phút ể hiển thị tất cả các vec-tơ. Hiển thị theo dõi không cần phải nhập
tín hiệu dội về, la bàn cũng nhƣ tốc ộ kế. 7 mục tiêu có tốc ộ và hƣớng khác nhau, ƣợc
ƣa ra trong bảng bên dƣới, sẽ tự ộng ƣợc mô phỏng.
7. Kiểm tra theo dõi tiếp tục trong 5 phút và sau ó lặp lại.
Để chấm dứt kiểm tra, bấm STBY/TX 2 lần và hiển thị ST-BY sẽ xuất hiện.
CPA và TCPA bên dƣới là những giá trị ban ầu:
Chú ý: Những chữ cái ánh dấu mục tiêu trong bảng và hình trên, trong hình vẽ hiển thị
thực tế là những mục tiêu ƣợc ánh dấu. lOMoAR cPSD| 15962736
2.17 CÁC TIÊU CHUẨN LỰA CHỌN CÁC MỤC TIÊU THEO DÕI
Bộ xử lý FURUNO ARPA phát hiện ra những mục tiêu trong nhiễu và phân biệt những tín
hiệu dội về của radar dựa trên kích thƣớc chuẩn của chúng. Mục tiêu có mức o lƣờng tiếng
dội lớn hơn phạm vi của những cái khác trên con tàu lớn nhất hoặc phạm vi tiếp xúc thƣờng
là mặt ất và chỉ ƣợc hiển thị nhƣ hình ảnh radar bình thƣờng. Tất cả tiếng dội của tàu cỡ
nhỏ với kích thƣớc nhỏ hơn mức này thƣờng ƣợc phân tích sâu hơn và xem nhƣ tàu, và
ƣợc hiển thị nhƣ những vòng tròng nhỏ xếp chồng bên trên hình ảnh tiếng dội.
Khi 1 mục tiêu ƣợc hiển thị lần ầu tiên, nó có vẻ nhƣ có tốc ộ là 0 nhƣng sẽ phát triển
thành 1 phƣơng vec-tơ khi có nhiều thông tin hơn ƣợc thu thập.
2.18 CÁC NHÂN TỐ ẢNH HƢỞNG ĐẾN CHỨC NĂNG ARPA Phản xạ từ biển
Nếu việc iều chỉnh loại bỏ nhiễu biển chính xác thì sẽ không có tác ộng nghiêm trọng nào. Mƣa và tuyết
Nhiễu này có thể ƣợc dò và theo dõi giống nhƣ các mục tiêu. Điều chỉnh A/C RAIN. Nếu
mƣa lớn, chuyển ổi sang S-band hoặc kích hoạt khử nhiễu giao thoa trên radar. Nếu ộ nhiễu
lớn vẫn còn, chuyển sang dò mục tiêu bằng tay. Những ám mây thấp
Thƣờng là ko có ảnh hƣởng. Nếu cần thiết, iều chỉnh A/C RAIN.
Độ khuếch ại thấp
Độ khuếch ại nhận ƣợc không ủ hoặc thấp sẽ dẫn ến một số mục tiêu không ƣợc dò tìm ở
khoảng cách xa Búp phát phụ.
Những vật che khuất radar Những tín hiệu phản hồi không trực tiếp Sự can thiệp radar Chƣơng 3
KHẢ NĂNG QUAN SÁT RADAR
3.1 THANG TẦM XA CỰC ĐẠI VÀ THANG TẦM XA CỰC TIỂU THANG TẦM XA CỰC TIỂU
Tầm xa cực tiểu của radar là khoảng cách gần nhất từ radar tới mục tiêu mà radar còn
có khả năng nhận biết ƣợc mục tiêu. Đối với những mục tiêu nằm ở khoảng cách gần hơn,
radar không có khả năng phát hiện. lOMoAR cPSD| 15962736
Tầm xa cực tiểu của radar phụ thuộc chiều dài xung phát, chiều cao anten và góc kẹp ứng.
THANG TẦM XA CỰC ĐẠI
Tầm xa tác dụng của radar là khoảng cách lớn nhất mà trong giới hạn ó radar có thể phát
hiện ƣợc mục tiêu, tức ảnh của mục tiêu còn xuất hiện ủ ể quan sát trên màn hình.
Mục tiêu ở càng xa, tín hiệu phản xạ trở về càng yếu. Mục tiêu ở xa nhất là mục tiêu có
sóng phản xạ về anten yếu nhất mà bộ thu của radar còn có khả năng khuếch ại lên ủ lớn
thành tín hiệu mục tiêu.
Nó phụ thuộc vào chiều cao anten, ộ cao mục tiêu, ộ lớn kích thƣớc và hình dạng khả năng
phản xạ sóng radar của mục tiêu và iều kiện thời tiết.
Do bề mặt trái ất là hình cầu nên với radar cũng xuất hiện hiện tƣợng ƣờng chân trời nhƣ
ối với thị giác (tuy nhiên trong iều kiện bình thƣờng, chân trời radar xa hơn chân trời thị
giác khoảng 6%). Nếu mục tiêu không cao hơn ƣờng chân trời, sóng iện từ phát i từ radar
không thể phản xạ từ mục tiêu trở về. X-BAND và S-BAND
Trong iều kiện thời tiết bình thƣờng thì ở băng tần X-band hay S-band không có gì
khác lắm, nhƣng trong iều kiện thời tiết xấu hay mƣa tuyết nặng, S-band phát hiện mục tiêu tốt hơn x-band.
ĐỘ PHÂN GIẢI RADAR:
Có hai yếu tố quan trọng trong ộ phân giải radar là: ộ phân giải theo góc và ộ phân giải theo khoảng cách.
Độ phân giải theo góc
Độ phân giải theo góc là khả năng phân biệt giữa ảnh các mục tiêu ứng gần trên màn hình
khi chúng có cùng khoảng cách tới tâm (tức là các mục tiêu ứng gần nhau, có cùng khoảng
cách tới radar ngoài thực tế).
Trƣờng hợp 2 mục tiêu có cùng khoảng cách tới radar và nằm gần nhau, ảnh của chúng
trên màn hình bị chập làm một. Độ phân giải theo khoảng cách:
Độ phân giải theo khoảng cách là khả năng phân biệt giữa ảnh các mục tiêu ứng gần nhau
ở hiện trƣờng trên cùng phƣơng vị, tức là các mục tiêu tách rời nhau thì ảnh của chúng
không bị chập trên màn ảnh của radar.
ĐỘ CHÍNH XÁC PHƢƠNG VỊ:
Một trong những tính năng quan trọng nhất của radar là làm thế nào ể o chính xác
phƣơng vị của radar. Đo chính xác cơ bản phƣơng vị phụ thuộc vào dải hẹp của tia radar.
Tuy nhiên phƣơng vị thƣờng lấy tƣơng ối từ hƣớng mũi tàu và do ó sự iều chỉnh thích
hợp cài ặt hƣớng mũi tàu là một yếu tố quan trọng ể mang ộ chính xác. Để giảm thiểu lỗi lOMoAR cPSD| 15962736
khi o phƣơng vị của mục tiêu thì ặt tín hiệu mục tiêu bằng cách chọn thang tầm xa phù hợp.
Đo khoảng cách ến mục tiêu cũng là một chức năng quan trọng của radar. Nói chung
có hai cách o là dùng vòng cự ly cố ịnh và vòng cự ly di ộng VRM. Các vòng cự ly cố ịnh
xuất hiện trên màn hình với một khoảng thời gian ịnh trƣớc và ƣớc tính khoảng cách của mục tiêu.
3.2 LỖI TÍN HIỆU DỘI LẠI:
Ảnh ảo do phản xạ nhiều lần: khi tàu i gần các mục tiêu lớn phản xạ tốt nhƣ: tàu lớn,
cầu, ê chắn sóng thì ngoài ảnh thật còn có 1 hoặc nhiều ảnh ảo nằm phía sau các ảnh này
M ỗ i l ầ n radar phát xung, m ộ t s ố b ứ c x ạ thoát
ra m ỗi bên chùm tia, ƣợ c g ọi là “sidelobes”.
N ế u t ồ n t ạ i m ộ t m ụ c tiêu ở ó nó có thể ƣợ c
phát hi ệ n b ở i hai chùm tia chính và ph ụ nên có
hai m ụ c tiêu th ậ t và ả o. B ạ n có th ể gi ả m nhi ễ u
và tri ệ t tiêu chúng b ằng cách iề u ch ỉ nh thích h ợ p A/C SEA.
nằm trên một hƣớng và cách ều nhau. Để giảm hay loại bỏ bằng cách iều chỉnh A/C SEA hợp lý. lOMoAR cPSD| 15962736
Búp phát phụ (sidelobe echoes) ẢNH ẢO:
Một mục tiêu tƣơng ối lớn gần tàu bạn
có thể ƣợc thể hiện ở hai vị trí trên màn
hình. Một trong số ó là ảnh thật phát trực
tiếp ến mục tiêu. Các mục tiêu ảo là do phản
xạ từ các mục tiêu lớn hoặc gần tàu mình.
Những vùng che khuất:
Ống khói, cột, cẩu…trong ƣờng dẫn của
anten chặn các tia radar. Nếu các mục tiêu bị
che khuất bỡi chúng thì radar không thể phát hiện ra ƣợc. 3.3 SART (Search and Rescue lOMoAR cPSD| 15962736 Transponder)
SART là phƣơng tiện chính trong GMDSS dùng xác ịnh vị trí tàu thuyền ang gặp nạn.
Nó hoạt ộng ở dãi tần số 9 GHz, phát ra tín hiệu khi ƣợc khởi ộng bởi song tới bất kỳ radar
nào ang hoạt ộng ở dãi song này. Trên màn hình, ảnh của nó là những chấm, bắt ầu từ vị trí
trạm SART, kéo dài theo ƣờng phƣơng vị, khoảng cách giữa các chấm là 0.64 hải lý. Để
dễ phân biệt nên sử dụng radar ở tầm xa 6-12 hải lý. Khi ến gần SART ở khoảng cách 1 hải
lý thì 12 chấm chuyển thành các cung tròn và thậm chí khi quá gần chúng sẽ biến thành
các ƣờng tròn ể báo tàu cứu hộ biết.
3.4 RACON (Radar Beacon)
Racon là một trạm thu phát sóng, phát ra một dấu hiệu dễ phân biệt khi ƣợc khởi
ộng xung ến từ radar. Khi sóng radar truyền tới anten của Racon thì trạm này thu tín hiệu ó
ồng thời phát ngay tín hiệu của mình trên cùng một tần số với radar. Tín hiệu Racon hiện
trên màn hình là một ƣờng xuyên tâm có gốc là một iểm nằm ngay bên ngoài phao tiêu lOMoAR cPSD| 15962736
radar, hoặc là tín hiệu mã Morse ƣợc thể hiện xuyên tâm ngay từ phía ngoài phao tiêu.
Trạm Raccon cho biết khoảng cách và phƣơng vị từ tàu ta ến trạm. Chƣơng 4 BẢO DƢỠNG
NGUY HIỂM: iện giật
Thiết bị này có iện áp cao có thể gây tử vong do iện giật ở một số nội mạch bao gồm:
ống tia iện tử (CRT) sử dụng ở hàng nghìn Vôn. Việc iều chỉnh bên trong, bảo dƣỡng và
sửa chữa chỉ ƣợc thực hiện bởi nhân viên bảo dƣỡng có trình ộ chuyên môn.
Sự tích iện trong tụ iện và các thiết bị khác sau khi tắt radar nên cần phải ợi ít nhất 3 phút ể tránh bị iện giật.
ĐẶC BIỆT PHẢI CHÖ Ý ĐẾN: lOMoAR cPSD| 15962736 • Nguồn cấp iện • Mạch CRT
• Mạch iều chế anten và èn Magnetron • Mạch của ộng cơ
CHÚ Ý: KHI LÀM VIỆC TRÊN BỘ PHẬN ANTEN
Mang ai an toàn và chiếc mũ bảo hộ khi làm việc trên anten. Luôn ảm bảo rằng các
radar ã tắt và công tắt radar phải ở vị trí OFF trƣớc khi làm việc trên anten. Ngoài ra, phải
ảm bảo rằng radar sẽ không vô tình hoạt ộng bỡi ngƣời khác, ể ngăn chặn các nguy cơ tìm
ẩn khi anten quay và tiếp xúc với bức xạ nguy hiểm.
Lịch trình bảo dƣỡng ịnh kỳ Mục kiểm tra Chu kỳ Kiểm tra và o Ghi chú
Màn hình hiển thị Hàng tuần
Làm sạch ịnh kỳ Không sử dụng màn hình bên dung môi hay
ngoài bằng khăn chat tẩy rửa ể làm sạch và mềm sạch màn hình
Các nút và bulong 3-6 tháng
Kiểm tra các nút Hàn kín có thể sử trên khối anten
hoặc ốc có bị ăn dụng thay vì sơn.
mòn hay nới lỏng Nhỏ ít dầu mỡ lên
không? Nếu cần các nút và ốc cho
thiết lau chùi và sau này dễ mở. sơn lại chúng. Thay thế chúng nếu chúng bị ăn mòn nhiều
Bộ tản nhiệt radar 3-6 tháng
Kiểm tra bụi bẩn Không sử dụng
và các vết nứt trên các chất bằng
bề mặt bộ tản nhựa ể làm sạch. nhiệt radar. Bụi dày nên lau bằng vải mềm ể khỏi hƣ hỏng do nƣớc gây ra. lOMoAR cPSD| 15962736 ống tia iện tử và 6 tháng Điện áp cao ở các linh kiện CRT và linh kiện xung quanh xung quanh thu hút bởi bụi gây ra cách iện kém. Yêu cầu ại diện của hang tới làm sạch Chƣơng 5 SỰ CỐ
5.1 SỰ CỐ ĐƠN GIẢN Sự cố Sửa chữa Âm phím không nghe thấy
Chỉnh âm lƣợng phím trên RADAR 2 menu Không có dấu mũi tàu
Trên R-type radar, kiểm tra SHIP’S MARK trên
RADAR 2 menu ã chọn ON chƣa? Thông số tàu
nhƣ chiều dài, chiều rộng nên nhập trong cài ặt ban
ầu. trên IMO-type thì ánh dấu tàu mình không thực hiện ƣợc lOMoAR cPSD| 15962736
5.2 CÁC SỰ CỐ CAO HƠN Sự cố
Điểm kiểm tra và nguyên Sửa chữa nhân
Nguồn radar bật nhƣng 1. Nổ cầu chì F1 hoặc F2 1. Thay cầu chì radar không vận hành.
Các phím chức năng 2. Điện áp chính
2. Sửa và thay ổi ầu vào không sáng lên
3. Mạch nguồn cung cấp 3. Thay thế mạch nguồn 4. Đèn chiếu sang 4. Thay thế èn hƣ hỏng
Điều chỉnh ộ sáng màn 1. Cài ặt RADAR 2 1. Đảm bảo RADAR 1 ã hình nhƣng không có menu ƣợc chọn trong menu hình ảnh 2. Hiệu iện thế CRT SYSTEM SETTING 3. SPU BOARD
2. Kiểm tra cẩn thận iện áp cung cắp 3. Thay thế SPU Board Anten không quay
1. Cơ cấu quay anten( chú 1. Chắc chắn rằng không có ý rằng dòng chữ “BRG
ngắn mạch trên #1 và # 2 SIG MISSING xuất hiện trong chế ộ stand-by)
2. Kiểm tra công tắt anten 2. Mạch INT-9170 bật ON chƣa?
Dữ liệu số và chữ và các SPU Board Thay thế SPU Board vị trí ánh dấu không
hiển thị ở chế ộ phát lOMoAR cPSD| 15962736 5.3 CHUẨN ĐOÁN LỖI
Chƣơng trình chuẩn oán lỗi ƣợc cung cấp ể thử
nghiệm các bo mạch chính trên màn hình hiển
thị của radar. Lƣu ý các hình ảnh thông thƣờng
trên radar bị mất trong quá trình chuẩn oán.
Tiến hành nhƣ sau ể thực hiện việc chuẩn oán:
1. Nhấn RADAR MENU ể hiển thị chức năng FUNCTIONS menu. 2. Nhấn phím [0] 2 lần ể hiển thị SYSTEM SETTING 2 menu.
3. Trên R-type, nhấn phím [3] ể chọn 3 TEST, sau ó nhấn ENTER.
Trên IMO-type nhấn phím [3] ể chọn 3
TEST, sau ó nhấn tiếp phím [3] ể chọn TEST ON, sau ó nhấn ENTER.
4. Để kết thúc chuẩn oán lỗi nhấn nút tắt
radar. Có thể khởi ộng nhanh lại nếu bạn
muốn hoạt ộng bình thƣờng KẾT LUẬN
Qua quá trình nghiên cứu và học tập cùng sự giúp ỡ của các thầy cô, ặc biệt là
thầy hƣớng dẫn em, em ã hoàn thành ề tài của mình. Hoàn thành xong ề tài em thấy
kiến thức về radar của mình ƣợc cải thiện và nâng cao lên. Nó ã giúp em hiểu kỹ
hơn về radar và cách khai thác và sử dụng radar FR-2805 hơn nữa là tất cả các radar.
Mỗi thiết bị iều cập nhật và thay ổi hiện ại mỗi ngày nhƣng với kiến thức của mình
em tin mình có thể vận hành ƣợc tất cả các loại radar.
Cuối cùng, một lần nữa em xin gởi lời cảm ơn chân thành và lời chúc sức khỏe
ến Ban Giám Hiệu trƣờng Đại học Giao Thông Vận Tải Thành Phố Hồ Chí Minh,
các thầy cô Khoa Hàng Hải ã dạy dỗ trong suốt 5 năm qua, và ặc biệt là thấy Nguyễn lOMoAR cPSD| 15962736
Xuân Thành ã giúp ỡ em hoàn thành bài luận văn tốt nghiệp này. Xin kính chúc các
Thầy Cô thành công trên con ƣờng của mình.
Nếu có iều kiện về thời gian và chi phí em có thể tạo ƣợc một phần mềm mô
phỏng cách sử dụng thể hiện giống nhƣ một radar thật. Nhƣng vì thời gian có hạn
và kiến thức hạn hẹp nên dù ã cố gắng hết sức không thể tránh khỏi những sai sót,
mong thầy cô óng góp ý kiến ể bài báo cáo ƣợc hoàn thiện hơn.
Em xin chân thành cảm ơn!
Tài liệu liên quan:
-

Tài liệu sưu tầm. Báo cáo đăng kiểm
37 19 -
Tiểu luận công nghệ chế tạo động cơ 2
40 20 -

PHÂN TÍCH HỆ THỐNG TREO CHỦ ĐỘNG VÀ LÁI CHỦ ĐỘNG
32 16 -
Chương 01 - Những Vấn Đề Cơ Bản Trong Thiết Kế Máy (ĐHGTVT). Môn Chi tiết máy (GTVT) | Trường Đại học Giao thông Vận tải.
91 46 -

Thiết kế hệ dẫn động cho máy khuấy dạng đứng - HGT. Môn Chi tiết máy (GTVT) | Trường Đại học Giao thông Vận tải.
83 42