Nghiên cứu các hệ thống an toàn và ổn định trên ô tô (ABS, TCS, ESP) | Đồ án tốt nghiệp Công nghệ kĩ thuật Ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Qua đó nhóm sinh viên xin gửi lời cảm ơn chân thành đến các thầy cô trường Đại học Sư phạm Kỹ thuật TP.HCM và đặc biệt là các thầy cô khoa Đào tạo Chất lượng cao và khoa Cơ khí Động lực đã tạo điều kiện, giúp nhóm có thêm nhiều kiến thức trong quá trình học tập và có thể áp dụng vào các công việc sau này. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:















Preview text:
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT
THÀNH PHỐ HỒ CHÍ MINH
KHÓA LUẬN TỐT NGHIỆP
NGÀNH CÔNG NGHỆ KỸ THUẬT Ô TÔ
NGHIÊN CỨU CÁC HỆ THỐNG AN TOÀN VÀ
ỔN ĐỊNH TRÊN Ô TÔ (ABS, TCS, ESP)
GVHD:TS. HUỲNH PHƯỚC SƠN SVTH: MAI HỮU NGHĨA HUỲNH TUẤN THỊNH S K L0 0 9 4 1 5
Tp. Hồ Chí Minh, tháng 8/2022
TRƯỜNG ĐẠI HỌC SƯ PHẠM KĨ THUẬT TP. HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO ĐỒ ÁN TỐT NGH Ệ I P
NGHIÊN CỨU CÁC HỆ THỐNG AN TOÀN VÀ ỔN
ĐỊNH TRÊN Ô TÔ (ABS, TCS, ESP) SVTH : MAI HỮU NGHĨA MSSV : 18145182 SVTH : HUỲNH TUẤN THỊNH MSSV : 18145248 Khoá : 2018 Ngành :
CÔNG NGHỆ KỸ THUẬT Ô TÔ GVHD :
TS. HUỲNH PHƯỚC SƠN
NHIỆM VỤ ĐỒ ÁN TỐT NGH Ệ I P
(Ngành: Công nghệ Kỹ thuật ô tô)
TÊN ĐỀ TÀI:
NGHIÊN CỨU CÁC HỆ THỐNG AN TOÀN VÀ ỔN ĐỊNH TRÊN Ô TÔ (ABS, TCS, ESP) Sinh viên thực hiện:
1 Họ và tên SV1: MAI HỮU NGHĨA MSSV: 18145182
2 Họ và tên SV2: HUỲNH TUẤN THỊNH MSSV: 18145248 I. NỘI DUNG:
1. Nghiên cứu về cơ sở lý thuyết điều khiển các hệ thống ABS, ESP
2. Cấu tạo, nguyên lý làm việc các hệ thống ABS, ESP
II. TÀI LIỆU THAM KHẢO:
1. Tài liệu số và tài liệu giấy (sách và giáo trình)
2. Bài báo khoa học chính thống trên các diễn đàn.
3. Tài liệu đào tạo của các công ty, tập đoàn.
III. TRÌNH BÀY:
• 01 quyển thuyết minh đồ án.
• Files (đơn, poster, thuyết minh) upload trên Google Drive
IV. THỜI GIAN THỰC HIỆN:
a. Ngày bắt đầu: 14/03/2022
b. Ngày hoàn thành: Theo kế hoạch của Khoa ĐTCLC
Tp.HCM, ngày 14 tháng 03 năm 2022 Trưởng ngành
Giáo viên hướng dẫn i
CỘNG HOÀ XÃ HỘI CHỦ NGHĨA VIỆT NAM Độ ậ
c l p – Tự do – Hạnh Phúc *******
PHIẾU NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN
Họ và tên Sinh viên: Mai Hữu Nghĩa MSSV: 18145182
Huỳnh Tuấn Thịnh MSSV: 18145248
Ngành: Công nghệ k thu ỹ ậ t Ô TÔ Tên đề tài:
CÁC HỆ THỐNG AN TOÀN VÀ ỔN ĐỊNH ĐƯỢC TÍCH HỢP TRÊN Ô TÔ
Họ và tên Giáo viên hướng dẫn: TS. Huỳnh Phước Sơn NHẬN XÉT
1. Về nội dung đề tài & kh i l ố ng th ượ ực hiện:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 2. Ưu i đ ểm:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 3. Khuyết điểm:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................
4. Đề nghị cho bảo vệ hay không?
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 5. Đánh giá loại: 6. Điểm: (Bằng chữ: )
Tp. H Chí Minh, ngày tháng n ồ m 2022. ă Giáo viên h ng d ướ ẫn
(Ký & ghi rõ h tên) ọ
Khoa ĐT CLC – ĐH SPKT TP.HCM ii
CỘNG HOÀ XÃ HỘI CHỦ NGHĨA VIỆT NAM Độ ậ
c l p – Tự do – Hạnh Phúc *******
PHIẾU NHẬN XÉT CỦA GIÁO VIÊN P HẢN BIỆN
Họ và tên Sinh viên: Mai Hữu Nghĩa MSSV: 18145182
Huỳnh Tuấn Thịnh MSSV: 18145248
Ngành: Công nghệ k thu ỹ ậ t Ô TÔ Tên đề tài:
NGHIÊN CỨU CÁC HỆ THỐNG AN TOÀN VÀ ỔN ĐỊNH TRÊN Ô TÔ (ABS, TCS, ESP)
Họ và tên Giáo viên hướng dẫn:....................................................................... NHẬN XÉT
1. Về nội dung đề tài & kh i l ố ng th ượ ực hiện:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 2. Ưu i đ ểm:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 3. Khuyết điểm:
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................
4. Đề nghị cho bảo vệ hay không?
............................................................................................................................................
............................................................................................................................................
............................................................................................................................................ 5. Đánh giá loại: 6. Điểm: (Bằng chữ: )
Tp. H Chí Minh, ngày tháng n ồ m 2022. ă Giáo viên phản biện
(Ký & ghi rõ h tên) ọ
Khoa ĐT CLC – ĐH SPKT TP.HCM iii LỜI CẢM ƠN
Nhóm sinh viên thực hiện đề tài xin gửi lời cảm ơn chân thành và vô cùng biết
ơn thầy Huỳnh Phước Sơn. Nhờ có sự hướng dẫn tận tâm và hỗ trợ hết mình của
Thầy mà đề tài của nhóm đã được hoàn thành đúng tiến độ và hoàn chỉnh về mặt nội dung.
Qua đó nhóm sinh viên xin gửi lời cảm ơn chân thành đến các thầy cô trường
Đại học Sư phạm Kỹ thuật TP.HCM và đặc biệt là các thầy cô khoa Đào tạo Chất
lượng cao và khoa Cơ khí Động lực đã tạo điều kiện, giúp nhóm có thêm nhiều kiến
thức trong quá trình học tập và có thể áp dụng vào các công việc sau này.
Xin chúc các thầy cô luôn luôn khoẻ mạnh, tràn đầy năng lượng và nhiệt huyết
trong công việc giảng dạy, hoàn thành xuất sắc các mục tiêu đề ra. Hy vọng trường
Đại học Sư phạm Kỹ thuật TPHCM sẽ đào tạo được nhiều sinh viên trẻ, năng động
và kiến thức chuyên môn tốt.
Nhóm sinh viên thực hiện đề tài xin chân thành cảm ơn! iv DANH MỤC HÌNH ẢNH
Hình 2.1: Đặc tính trượt của bánh xe. ...........................................................4
Hình 2.2: Đồ thị moment phanh của xe ban đầu. .........................................5
Hình 2.3: Quá trình phanh của xe không có ABS. .......................................7
Hình 2.4: Quá trình phanh của xe có trang bị ABS. .....................................8
Hình 2.5: Quãng đường phanh của xe có và không có ABS. .......................9
Hình 2.6: Quá trình phanh xe trên đường trơn trượt của ABS. .................10
Hình 2.7: Phanh trên đường có 2 hệ số bám khác nhau. ............................12
Hình 2.8: Quá trình phanh trên đường khác hệ số bám của ABS. .............13
Hình 2.9: Phân loại các hệ thống ABS. ......................................................15
Hình 2.10: Cấu tạo của hệ thống ABS. ......................................................16
Hình 2.11: Cấu tạo và tín hiện của cảm biến tốc độ bánh xe. ....................18
Hình 2.12: Cấu tạo bộ phận thủy lực loại van điện từ 2/2. .........................19
Hình 2.13: Sơ đồ khối của hệ thống ABS. .................................................19
Hình 2.14: Chế độ tăng áp của hệ thống ABS. ...........................................21
Hình 2.15: Chế độ giữ áp của hệ thống ABS. ............................................22
Hình 2.16: Chế độ giảm áp của hệ thống ABS. .........................................23
Hình 3.1: Sơ đồ phân phối moment dẫn động của động cơ. ......................24
Hình 3.2: Sơ đồ lực phân bố. ......................................................................25
Hình 3.3: Sơ đồ cấu tạo hệ thống TCS. ......................................................27
Hình 3.4: Cấu tạo hệ thống TCS. ................................................................29
Hình 3.5: Sơ đồ điều khiển hệ thống TCS. .................................................30
Hình 3.6: Biểu đồ độ trượt được điều khiển bởi TCS. ...............................32
Hình 3.7: Bánh xe bên trái bị sa lầy. ..........................................................33
Hình 3.8: Đồ thị hoạt động của hệ thống TCS. ..........................................34
Hình 3.9: Điều khiển của TCS. ..................................................................35
Hình 3.10: TCS điều khiển tốc độ và moment phanh. ...............................36
Hình 4.1: Xe khi quay vòng. ......................................................................38
Hình 4.2: Tâm quay vòng của xe. ..............................................................40
Hình 4.3: Cấu tạo của cụm thủy lực. ..........................................................43
Hình 4.4: Mạch dầu trong cụm thủy lực của ESP. .....................................43 v
Hình 4.5: Cấu tạo của cảm biến gia tốc ngang. ..........................................44
Hình 4.6: Cấu tạo của cảm biến độ lệch thân xe. .......................................45
Hình 4.7: Cấu tạo của cảm biến góc lái LSW1. .........................................46
Hình 4.8: Trạng thái quay vòng thiếu. ........................................................48
Hình 4.9: Tác động của ESP. .....................................................................49
Hình 4.10: : ESP điều khiển quay vòng thừa. .............................................50
Hình 4.11: Hiện tượng quay vòng thừa. .....................................................50
Hình 4.12: Quá trình điều chỉnh lực phanh của ESP. .................................52
Hình 4.13: Quỹ đạo của xe có và không có ESP khi vào cua gấp. ............53
Hình 4.14: Quỹ đạo của xe khi phanh gấp. ................................................55
Hình 4.15: Quỹ đạo của xe khi vào đường quanh co. ................................57
Hình 4.16: Sơ đồ nguyên lý hoạt động của hệ thống ESP. ........................58
Hình 4.17: Sơ đồ khối của ESP. .................................................................59
Hình 4.18: Thứ tự điều khiển của ESP trên xe. ..........................................60
Hình 5.1: Hoạt động của một vài hệ thống ứng dụng ESP. ........................64
Hình 5.2: Quy trình xử lý tín hiệu của một số hệ thống ứng dụng ESP. ....64
Hình 5.3: Mô tả hoạt động của HBA. .........................................................65
Hình 5.4: Mô tả hoạt động của HHC. .........................................................66
Hình 5.5: Cấu tạo hệ thống HHC. ..............................................................67
Hình 5.6: Mô hình hoạt động của HDC. ....................................................68
Hình 5.7: Mô tả hoạt động của CDD. .........................................................69
Hình 5.8: Mô tả hoạt động của HFC. .........................................................70
Hình 5.9: Mô tả hoạt động của HRB. .........................................................71 vi MỤC LỤC
NHIỆM VỤ ĐỒ ÁN TỐT NGHIỆP ................................................................. i
PHIẾU NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN ................................ ii
PHIẾU NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN .................................. iii
LỜI CẢM ƠN ................................................................................................. iv
DANH MỤC HÌNH ẢNH .................................................................................v
MỤC LỤC ...................................................................................................... vii Chương 1.
TỔNG QUAN VỀ ĐỀ TÀI .......................................................1
1.1. Tính cấp thiết của đề tài .........................................................................1
1.2. Nội dung nghiên cứu .............................................................................1
1.3. Đối tượng nghiên cứu ............................................................................1
1.4. Phương pháp nghiên cứu .......................................................................2
1.5. Kết quả cần đạt ......................................................................................2 Chương 2.
HỆ THỐNG PHANH CHỐNG BÓ CỨNG (ANTI-LOCK
BRAKING SYSTEMS – ABS) .........................................................................3
2.1. Hiện tượng và nguyên nhân gây bó cứng bánh xe khi phanh ...............3
2.2. Cơ sở lý thuyết về điều hòa lực phanh chống bó cứng trên xe .............5
2.3. Giới thiệu hệ thống phanh chống bó cứng ABS .................................15
2.4. Cấu tạo của hệ thống phanh chống bó cứng ABS ...............................16
2.5. Nguyên lý làm việc của hệ thống phanh chống bó cứng ABS ............19 Chương 3.
HỆ THỐNG ĐIỀU KHIỂN LỰC KÉO TCS ..........................24
3.1. Hiện tượng trượt quay của bánh xe. ....................................................24
3.2. Nguyên nhân dẫn đến hiện tượng trượt quay. .....................................25
3.3. Giới thiệu về hệ thống TCS. ................................................................26
3.4. Cấu tạo của hệ thống TCS. ..................................................................29
3.5. Cơ sở lý thuyết của hệ thống TCS. .....................................................30
3.6. Nguyên lý hoạt động của hệ thống TCS. ............................................33 vii Chương 4.
HỆ THỐNG CÂN BẰNG ĐIỆN TỬ ESP. .............................38
4.1. Hiện tượng mất ổn định khi xe quay vòng. .........................................38
4.2. Giới thiệu hệ thống ESP. .....................................................................42
4.3. Cấu tạo của hệ thống ESP. ..................................................................42
4.4. Cơ sở lý thuyết của hệ thống ESP. ......................................................47
4.5. Nguyên lý hoạt động của hệ thống ESP. .............................................51
4.5.1. Xe vào cua. ..................................................................................52
4.5.2. Xe di chuyển với tốc độ cao qua một đoạn cua gấp hình chữ S. 53
4.5.3. Phanh khẩn cấp và chuyển làn. ...................................................54
4.5.4. Đánh lái và trả lái liên tục khi xe vào đường quanh co với góc cua
lớn. .....................................................................................................56
4.6. Nguyên tắc điều khiển của hệ thống ESP. ..........................................59 Chương 5.
CÁC HỆ THỐNG TRÊN CÁC XE HIỆN ĐẠI NGÀY NAY 63 Chương 6.
KẾT LUẬN VÀ KIẾN NGHỊ .................................................72 viii
Chương 1. TỔNG QUAN VỀ ĐỀ TÀ I
1.1. Tính cấp thiết của đề tài
Ngày nay, để sở hữu được một chiếc xe ô tô là một việc không còn quá xa vời với
người dân Việt Nam. Trong năm 2021, tổng số xe đã được bán ra là khoảng 410.000,
theo Báo Thanh niên [1]. Qua đó, cho thấy người dân ngày càng ưa chuộng loại phương
tiện này, nhờ vào sự tiện nghi, thoải mái mà xe mang lại khi phải di chuyển dưới thời
tiết khắc nghiệt tại Việt Nam.
Tuy nhiên, song song với số lượng xe bán ra được nêu trên, số vụ tai nạn giao thông
xảy ra vẫn còn nằm ở một con số đáng lo ngại. Điều này khiến nhiều người hoài nghi
về sự an toàn mà các phương tiện này mang lại. Chính vì thế, nhóm chúng tôi đã quyết
định nghiên cứu đề tài “Các hệ thống hỗ trợ an toàn và ổn định ô tô trang bị tích hợp trên hệ thống phanh”.
Đề tài được thực hiện với mục tiêu nghiên cứu và tổng hợp các tài liệu có liên quan
đến các hệ thống an toàn và ổn định ô tô được đề cập đến trong bài báo cáo, cụ thể là
Hệ thống phanh chống bó cứng – ABS, Hệ thống tăng cường lực kéo – TCS, Hệ thống
cân bằng điện tử - ESP và một số hệ thống an toàn khác. Bài báo cáo sẽ là một nguồn
thông tin tổng hợp đáng tin cậy dành cho các đối tượng đang có nhu cầu tìm kiếm thông
tin về các hệ thống trên ô tô.
1.2. Nội dung nghiên cứu
Bài báo cáo tập trung nghiên cứu các hệ thống an toàn và ổn định trên xe ô tô. Các
nghiên cứu này xoay quanh cấu tạo và nguyên lí làm việc của các hệ thống. Từ đó nhận
ra vai trò cụ thể của từng hệ thống trong việc tác động lên quá trình điều khiển phương
tiện của người lái hằng ngày, đảm bảo cho người lái có được trải nghiệm tốt nhất và an
toàn nhất. Đặc biệt là trong các tình huống nguy hiểm gây mất an toàn và ổn định của
xe, ưu điểm của các hệ thống này càng trở nên nổi bật và cụ thể hơn nữa.
1.3. Đối tượng nghiên cứu
Bài báo cáo được thực hiện trong khoảng thời gian 4 tháng, từ tháng 4 đến tháng 7 năm
2022. Dựa trên các hệ thống đã và đang được trang bị trên các phương tiện giao thông
hiện nay, cụ thể là trên xe ô tô. 1
Đối tượng mà nhóm nghiên cứu đang hướng đến là các hệ thống an toàn và ổn định trên
ô tô. Phân tích tình huống nguy hiểm thường gặp trong quá trình lái xe dẫn đến những
ảnh huởng không đáng có. Sau đó, nhóm hướng đến phân tích hoạt động của các hệ
thống khi xe gặp phải tình huống trên.
1.4. Phương pháp nghiên cứu
Nhóm nghiên cứu sử dụng 2 phương pháp chính: -
Phương pháp phân tích và tổng hợp: phân tích các tài liệu có liên quan đến đề
tài và tổng hợp có chọn lọc các nội dung để đưa vào bài báo cáo -
Phương pháp phân loại và hệ thống hóa: phân loại các chức năng, cấu tạo, hoạt
động của từng hệ thống, hệ thống hóa các nội dung đưa vào để bố cục bài viết được chặt chẽ và hệ thống hơn.
1.5. Kết quả cần đạt
Để đánh giá một bài nghiên cứu cần dựa trên nhiều yếu tố. Và sau đây là một số kết
quả mà nhóm thực hiện mong muốn đạt được: - Hoàn thành bài báo cáo, -
Các kiến thức liên quan được tổng hợp đầy đủ trong bài báo cáo, -
Có được những hiểu biết nhất định về các hệ thống an toàn trên ô tô sau khi bài báo cáo kết thúc. 2
Chương 2. HỆ THỐNG PHANH CHỐNG BÓ CỨNG (ANTI-
LOCK BRAKING SYSTEMS – ABS )
2.1. Hiện tượng và nguyên nhân gây bó cứng bánh xe khi phanh
Khi điều khiển phương tiện di chuyển ở tốc độ cao hoặc đang di chuyển trên mặt
đường có hệ số bám thấp (đường mưa trơn trượt hoặc đường đóng băng, tuyết…) và đạp
phanh đột ngột, bánh xe sẽ bị hãm cứng không còn quay nữa mà chuyển sang trượt lết
trên mặt đường do lực quán tính. Kết quả là xe vẫn bị trượt về phía trước dù đã đạp
phanh. Khi đó quãng đường phanh sẽ kéo dài hơn thông thường và hiệu quả phanh cũng
thấp đi. Xe trở nên mất ổn định và người lái gần như không thể kiểm soát được chiếc xe
của mình. Đây gọi là hiện tượng bó cứng bánh xe khi phanh.
Để giải thích nguyên nhân gây ra hiện tượng này, đầu tiên ta xét điều kiện để bánh
xe không bị trượt lết khi phanh: 𝐹 [2]. ! ≤ 𝐹"!" Trong đó: 𝐹
ực phanh cực đạ ở bánh xe (N) !#là l i 𝐹
là lực bám giữa bánh xe với mặt đường (N) "!"
Theo công thức trên, để bánh xe không bị trượt lết khi phanh thì lực phanh cực đại
ở bánh xe phải nhỏ hơn hoặc bằng lực bám dọc. Lực bám dọc 𝐹 ằ ức: "
# và lực bám ngang#𝐹 # được xác định b ng công th !" "# 𝐹 [3]. " # = 𝜇 # = 𝜇 !" #$. 𝑍%; # 𝐹"# &. 𝑍% Trong đó:
𝑍 – phản lực thẳng đứng từ mặt đường tác dụng lên bánh xe (N). % 𝜇
– là hệ số bám giữa bánh xe chủ động đến mặt đường theo phương dọc. #$
𝜇 – là hệ số bám giữa bánh xe chủ động đến mặt đường theo phương ngang. &
Hệ số bám này phụ thuộc vào nhiều yếu tố như vật liệu đường, nguyên liệu chế tạo
lốp xe, tình trạng và kết cấu mặt đường, tải trọng tác dụng lên xe… Các tính toán động
lực học trong quá trình phanh thường sử dụng các hệ số bám được xác định bằng thực
nghiệm, bằng cách kéo bánh xe bị hãm cứng và trượt lết hoàn toàn. Trong quá trình
phanh ô tô, hệ số bám của bánh xe phụ thuộc rất nhiều vào sự trượt tương đối giữa bánh
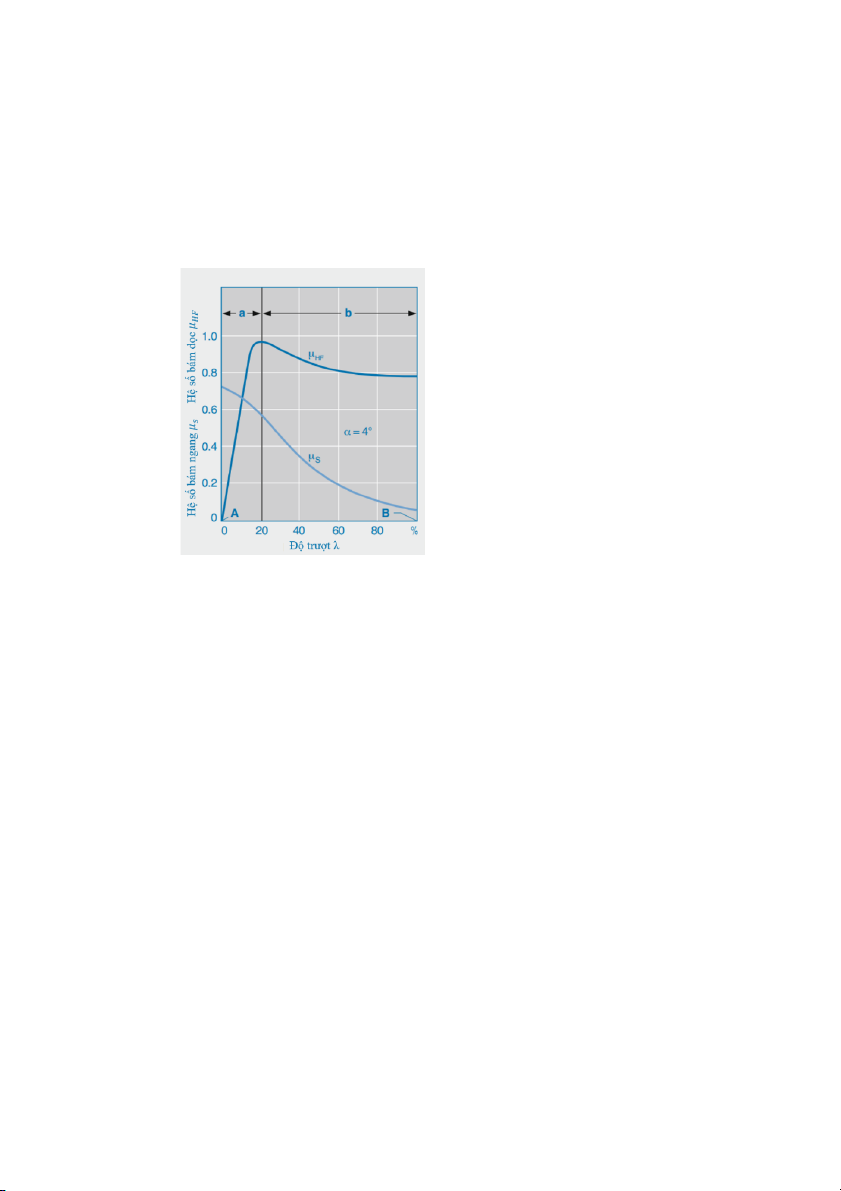
xe đối với mặt đường. Dưới đây là đồ thị thực nghiệm mô tả sự thay đổi hệ số bám dọc 3 𝜇 và hệ số bám ngang
của bánh xe theo độ trượt tương đối ặ #$ #𝜇&
𝜆 giữa bánh xe với m t
đường. Đường cong được chia thành một vùng ổn định và một vùng không ổn định có
sự tăng liên tục. Một đường thẳng giả định cho trường hợp phanh khẩn cấp.
Hình 2.1: Đặc tính trượt của bánh xe. Trong đó: a – vùng ổn định
b – vùng không ổn định α – góc trượt A – bánh xe quay
B – bánh xe bị bó cứng
Ta có thể thấy, khi tốc độ của xe tăng lên, độ trượt tương đối 𝜆 cũng tăng làm cho hệ
số bám dọc 𝜇 giảm. Khi đó lực bám của bánh xe lên mặt đường #$ 𝐹" # cũng giảm !"
xuống, lực phanh sẽ lớn hơn lực bám của bánh xe 𝐹! ≥ 𝐹" # làm cho các bánh xe bị !"
hãm cứng và trượt lết trên mặt đường, quãng đường phanh tăng lên. Ngoài ra, khi độ
trượt tăng cũng làm cho hệ số bám ngang 𝜇
m xuống, d n đến việc xe sẽ mất tính giả ẫ
ổn định và tính dẫn hướng khi lái. Đến một lúc khi hệ số bám ngang giảm về không, xe
sẽ mất hoàn toàn khả năng đánh lái.
Xét trường hợp hệ số bám dọc#𝜇 đạt giá trị cực đại, độ trượt lúc này đạt giá trị tối #$
ưu. Lực phanh khi đó sẽ đạt giá trị cực đại 𝐹 . Có thể thấy, khi này !'() = 𝜇#$'(). 𝑍%
hiệu quả phanh cao nhất. Không những vậy, hệ số bám ngang cũng đạt giá trị cao giúp
đảm bảo tính dẫn hướng và ổn định hướng của xe. Thông qua thực nghiệm, giá trị cực
đại của hệ số bám dọc tương ứng với độ trượt nằm trong khoảng 10 – 30% [4]. 4
Vì thế các xe hiện đại được trang bị hệ thống ABS để điều chỉnh độ trượt của xe nằm
trong khoảng tối ưu này. Hệ thống này ngăn tình trạng bánh xe bị bó cứng và xe bị mất
kiểm soát khi phanh gấp, bằng cách phát hiện các dấu hiệu bó cứng một hay toàn bộ
bánh xe và tăng giảm áp suất phanh phù hợp. Đảm bảo sự ổn định khi lái và giảm nguy
cơ bánh xe bị trượt lết.
2.2. Cơ sở lý thuyết về điều hòa lực phanh chống bó cứng trên xe
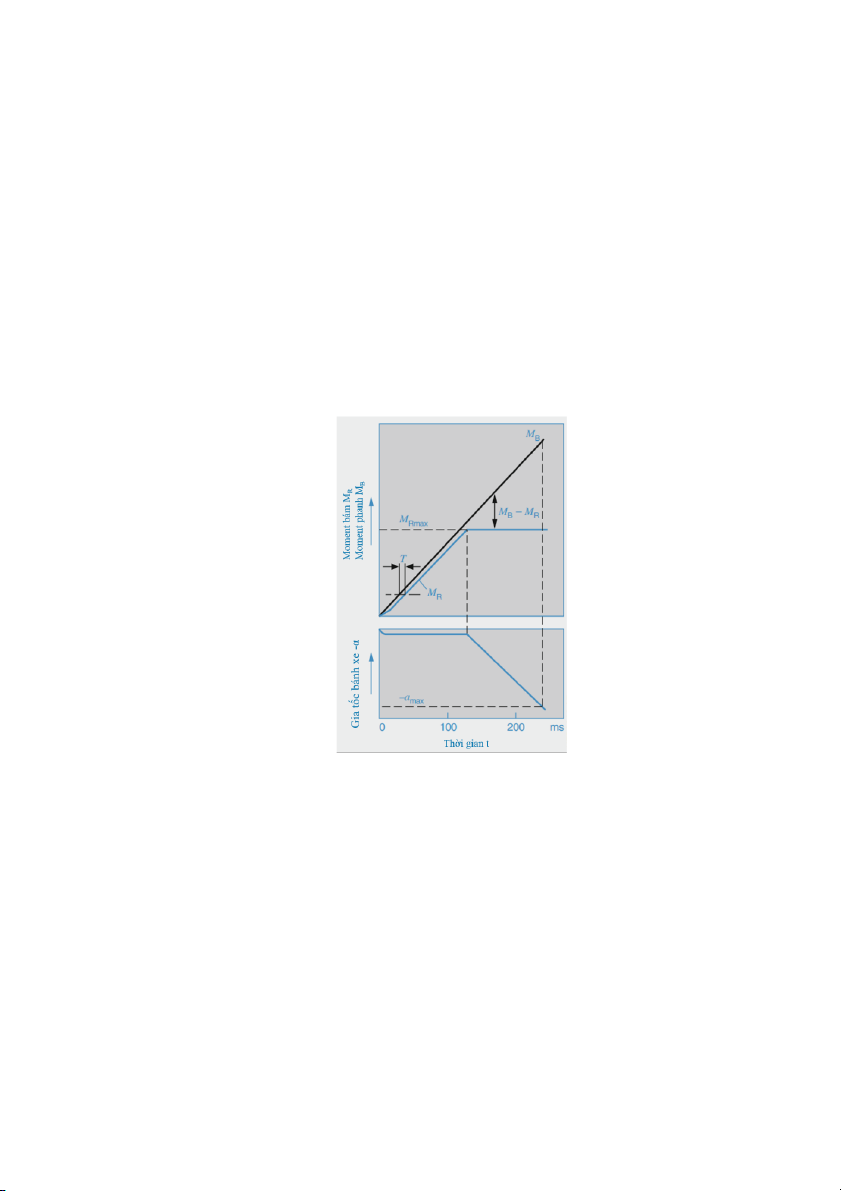
Hình dưới đây cho thấy mối quan hệ giữa moment phanh MB (moment tạo ra bởi
phanh thông qua lốp xe) hoặc moment ma sát mặt đường MR (moment tác động lên bánh
xe thông qua lực ma sát giữa lốp xe và mặt đường) và thời gian t, cũng như mối liên hệ
giữa sự giảm tốc của bánh xe (-a) và thời gian t, nhờ đó mà moment phanh tăng tuyến tính theo thời gian.
Hình 2.2: Đồ thị moment phanh của xe ban đầu. Trong đó:
(-a): Độ giảm tốc của bánh xe
(-amax): Độ giảm tốc cực đại của bánh xe MB: Moment phanh
MR: Moment bám của mặt đường 5
MRmax: Moment bám cực đại T: Thời gian trễ
Moment bám của mặt đường trễ hơn so với moment phanh một khoảng thời gian T,
miễn là phanh luôn nằm trong khoảng ổn định trên đường cong lực ma sát so với trượt
phanh. Sau khoảng 130ms, đường còn đạt đến giá trị µHfmax. Từ điểm này, đường cong
không đổi trong khi MB vẫn tăng đều, moment ma sát mặt đường MR không thể tăng
hơn nữa mà vẫn giữ một giá trị cố định. Trong vùng từ 130ms đến 240ms (khi bánh xe
bị bó cứng), chênh lệch moment MB – MR đang ở trong khoảng ổn định tăng cao nhanh
chóng. Sự chênh lệch moment này đo chính xác sự giảm tốc của bánh xe (-a) của bánh
xe đang phanh. Trong khoảng ổn định, sự giảm tốc này bị giới hạn ở một giá trị nhỏ,
trong khi ở khoảng không ổn định, giá trị tăng nhanh chóng. Do đó, đường cong này
cho thấy các điểm đối lập giữa khoảng ổn định với khoảng không ổn định. Và phanh
ABS cũng khai thác vào các đặc điểm đối lập này.
Một yếu tố quan trọng trong việc xác định độ hiệu quả của hệ thống điều khiển ABS
là lựa chọn các trị số điều chỉnh. Lựa chọn cơ bản nhất là tín hiệu từ cảm biến bánh xe
mà ECU tính toán sự tăng/giảm tốc của bánh xe, trượt phanh, tốc độ tham chiếu và sự
giảm tốc của xe. Kể cả sự tăng/giảm tốc của bánh xe hay trượt phanh đều có thể làm trị
số điều chỉnh, vì khi phanh bánh xe chủ động sẽ có chuyển động hoàn toàn khác so với
bánh xe không chủ động. Tuy nhiên, kết hợp tất cả các trị số này một cách hợp lí, ta vẫn
có thể thu được một kết quả tốt.
Vì độ trượt phanh không thể đo trực tiếp nên ECU tính toán một đại lượng khác
tương ứng với nó. Cơ sở để tính toán là tốc độ tham chiếu, đại diện cho tốc độ ở điều
kiện phanh lí tưởng (độ trượt phanh tối ưu). Do đó tốc độ có thể được xác định, cảm
biến tốc độ bánh xe liên tục truyền tín hiệu đến ECU để tính toán tốc độ của bánh xe.
ECU lấy tín hiệu từ một cặp bánh xe chéo (trái trên, phải dưới) và tính toán tốc độ tham
chiếu. Khi phanh một phần, trong cặp bánh xe chéo, bánh nào nhanh hơn sẽ được dùng
làm tốc độ tham chiếu. Nếu ABS can thiệp khi phanh khẩn cấp, tốc độ bánh xe sẽ khác
tốc độ xe và do đó không thể dùng để tính toán tốc độ tham chiếu mà không điều chỉnh.
Trong suốt quá trình ABS điều khiển, ABS cung cấp tốc độ tham chiếu dựa trên tốc độ
khi bắt đầu điều khiển và giảm tốc độ đó một theo tỉ lệ tuyến tính. Độ dốc của đồ thị tốc
độ tham chiếu được xác định bằng cách phân tích các mối liên hệ và tín hiệu. Nếu sự
giảm tốc được thêm vào trong phương trình (kể cả sự tăng/giảm tốc của bánh xe và sự
trượt phanh, và nếu vòng lặp trong ECU được điều biến bởi một kết quả tổng hợp thì có
thể điều khiển phanh ở trạng thái lí tưởng. 6
Ta sẽ lần lượt khảo sát chuyển động của hai chiếc xe, một chiếc được trang bị ABS
và một chiếc không được trang bị trong lần lượt các trường hợp sau: -
Trường hợp 1: Phanh trên đường thẳng.
Cho vận tốc khi bắt đầu phanh Vo = 100km/h.
Cả hai xe phanh cùng một lúc.
Mặt đường có độ bám tốt.
Ta đánh giá hiệu suất phanh của 2 xe trên theo các biểu đồ sau:
Hình 2.3: Quá trình phanh của xe không có ABS. 7
Dựa theo biểu đồ có thể thấy khi đạp phanh, áp lực phanh ngay lập tức được đẩy lên
cao nhất và tiếp tục duy trì trong suốt quá trình phanh. Điều này dẫn đến các bánh xe
lập tức bị khóa cứng và không thể điều khiển được cho dù có đánh lái. Tốc độ xe khi đó
giảm rất chậm qua do tác dụng của lực quán tính dẫn đến quãng đường phanh trở nên dài hơn rất nhiều.
Hình 2.4: Quá trình phanh của xe có trang bị ABS. Trong đó: VF là tốc độ của xe.
Vref là tốc độ tương đối.
𝜆 là sự thay đổi của hệ số trượt. VR là tốc độ bánh xe.
+A, +a là ngưỡng tăng tốc của bánh xe.
-a là ngưỡng giảm tốc của bánh xe.
−#∆𝑝 là độ giảm áp lực phanh. (%
Theo sơ đồ có thể thấy hoạt động của ABS được chia ra làm 8 giai đoạn:
Trong giai đoạn đầu của phanh, áp suất phanh ở bánh xe và tốc độ giảm tốc của
bánh xe (gia tốc âm) tăng lên. Khi kết thúc giai đoạn 1, sự giảm tốc của bánh xe đạt
ngưỡng cài đặt (–a). Van điện từ chuyển sang chế độ "duy trì áp suất". Tại thời điểm 8
này, áp suất phanh không được giảm, bởi vì tại ngưỡng (–a) lực phanh có thể bị vượt
quá với độ trượt của phanh và khi đó quãng đường phanh tiềm năng sẽ bị tăng lên.
Vào cuối giai đoạn 2, tốc độ của bánh xe, υR, giảm xuống dưới ngưỡng λ1. Tại thời
điểm đó, các van điện từ chuyển sang chế độ “giảm áp suất” để áp suất giảm xuống và
chúng vẫn ở cài đặt đó miễn là sự giảm tốc của bánh xe trên ngưỡng (–a).
Vào cuối giai đoạn 3, áp suất phanh giảm và tiếp theo là giai đoạn duy trì áp suất
trong một thời gian nhất định. Trong khoảng thời gian đó, gia tốc của bánh xe đã tăng
đến mức vượt qua ngưỡng (+ a). Áp suất tiếp tục được duy trì ở mức không đổi.
Cuối giai đoạn 4, gia tốc của bánh xe vượt ngưỡng khá cao (+ A). Do đó, áp suất
phanh tăng lên nhằm giữ gia tốc bánh xe giảm xuống dưỡi ngưỡng (+ A).
Giai đoạn 5, áp suất phanh tiếp tục tăng để giảm gia tốc bánh xe.
Trong giai đoạn 6, áp suất phanh một lần nữa được giữ không đổi vì gia tốc nằm
trên ngưỡng (+ a). Vào cuối giai đoạn này, gia tốc của bánh xe giảm xuống dưới ngưỡng
(+ a). Đây là dấu hiệu cho thấy bánh xe đã quay trở lại ổn định.
Áp suất phanh lúc này được tăng lên theo từng giai đoạn cho đến khi sự giảm tốc
của bánh xe vượt qua ngưỡng (–a) (kết thúc giai đoạn 7). Lúc này, áp suất phanh giảm
ngay lập tức mà không tạo ra tín hiệu λ1.
Giai đoạn 8, giảm áp suất phanh và kết thúc quá trình phanh.
Do cách điều khiển trên mà bánh xe không hề bị khóa cứng trong quá trình phanh,
do đó người lái vẫn có thể điều khiển chiếc xe tránh chướng ngại vật đồng thời giảm
đáng kể quãng đường phanh. Kết quả thu được chuyển động của 2 xe như sau.
Hình 2.5: Quãng đường phanh của xe có và không có ABS. 9 -
Trường hợp 2: Phanh xe trên đường có hệ số bám kém (đường trơn trượt).
Ta sẽ lần lượt khảo sát chuyển động của hai chiếc xe, một chiếc được trang bị ABS
và một chiếc không được trang bị.
Cho vận tốc khi bắt đầu phanh Vo = 70km/h.
Cả hai xe phanh cùng một lúc.
Mặt đường có độ bám kém.
Hiệu suất phanh của xe trang bị ABS được thể hiện qua các biểu đồ sau:
Hình 2.6: Quá trình phanh xe trên đường trơn trượt của ABS. Trong đó: VF là tốc độ của xe.
Vref là tốc độ tương đối.
𝜆1 là sự thay đổi của hệ số trượt. VR là tốc độ bánh xe. 10
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445