Nghiên cứu lí thuyết, thiết kế chế tạo mô hình và ECU điều khiển hệ thống cảnh báo và va chạm trước FCW | Tiểu luận môn Công nghệ kĩ thuật Ô tô
Đầu tiên cho phép chúng em bày tỏ lòng biết ơn đến thầy đã hỗ trợ nhóm chúng em trong suốt quá trình học tập và thực hiện mô hình môn học Chuyên đề 2. Với lòng biết ơn sâu sắc nhất, nhóm chúng em xin gửi đến thầy lời cảm ơn chân thành vì đã truyền đạt vốn kiến thức quý báu cho chúng em trong suốt thời gian học tập tại trường. Nhờ có những lời hướng dẫn tận tình, dạy bảo của thầy nên đề tài. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:









Preview text:
MỤC LỤC LỜI NÓI ĐẦU 4 CHƯƠNG 1: TỔNG QUAN 5
1.1.TỔNG QUAN HỆ THỐNG CẢNH BÁO VA CHẠM PHÍA TRƯỚC 5
1.1.1.GIỚI THIỆU HỆ THỐNG CẢNH BÁO VA CHẠM PHÍA TRƯỚC FCW 5
1.1.2.KHI NÀO HỆ THỐNG FCW SẼ HỮU ÍCH? 6
1.1.3.HẠN CHẾ CỦA HỆ THỐNG FCW? 7
1.2.CẤU TẠO VÀ HOẠT ĐỘNG CỦA HỆ THỐNG. 9
1.2.1.CẤU TẠO THÀNH PHẦN CỦA HỆ THỐNG 9 1.2.2.CẢM BIẾN TỐC ĐỘ 10
1.2.2.1.ĐỊNH NGHĨA CẢM BIẾN TỐC ĐỘ TRÊN Ô TÔ 10
1.2.2.2.CẤU TẠO CẢM BIẾN TỐC ĐỘ TRÊN Ô TÔ 11
1.2.2.3.NGUYÊN LÝ HOẠT ĐỘNG CỦA CẢM BIẾN TỐC ĐỘ Ô TÔ 11
1.2.2.4.CÁC LOẠI CẢM BIẾN TỐC ĐỘ Ô TÔ 12
1.2.3.CẢM BIẾN LAZER/HỒNG NGOẠI 13 1.2.3.1. ĐỊNH NGHĨA 13
1.2.3.2.NGUYÊN LÍ HOẠT ĐỘNG 13 1.2.4.RADAR 14 1.2.4.1.RADAR Ô TÔ LÀ GÌ? 14
1.2.4.2.NGUYÊN LÍ HOẠT ĐỘNG 15 1.2.4.3.PHÂN LOẠI 16
1.2.4.4.ƯU ĐIỂM CỦA RADAR 18 1.2.5.CAMERA 18 1.2.5.1.VAI TRÒ, CHỨC NĂNG 19
1.2.5.2.CÁC LOẠI CAMERA TRƯỚC XE PHỔ BIẾN HIỆN NAY 21
1.2.6.BẢNG GIÁM SÁT VÀ ĐIỀU KHIỂN 23
1.2.6.1.CÀI ĐẶT FCW TRÊN ACURA 23
1.3.NGUYÊN LÍ HOẠT ĐỘNG CỦA HỆ THỐNG CẢNH BÁO 26
1.3.1.CÁCH THỨC HOẠT ĐỘNG 26 1.3.2.BIỂU ĐỒ MODE 30 1.3.3.SƠ ĐỒ NGUYÊN LÍ HOẠT ĐỘNG 31
1.3.4.CÁC MỨC CẢNH BÁO CỦA HỆ THỐNG 32
CHƯƠNG 2: TÌM HIỂU VÀ THIẾT KẾ HỆ THỐNG CẢNH BÁO VA CHẠM TRƯỚC FCW 34 2.1. GIỚI THIỆU 34
2.1.1. MỤC TIÊU NGHIÊN CỨU ĐỀ TÀI 34
2.1.2. ĐỐI TƯỢNG NGHIÊN CỨU “MÔ HÌNH HỆ THỐNG CẢN H BÁO VA
CHẠM TRƯỚC TRÊN Ô TÔ” 34
2.1.3. TÌNH HÌNH TRONG VÀ NGOÀI NƯỚC 35
2.1.4. NHỮNG VẤN ĐỀ CÒN TỒN TẠI 36 2.2. Ý TƯỞNG THIẾT KẾ 36 2.3. YÊU CẦU THIẾT KẾ 37 2.4. GIẢI PHÁP THIẾT KẾ 38 2.5. LỰA CHỌN LINH KIỆN 38
2.5.1. LỰA CHỌN VI ĐIỀU KHIỂN 38
2.5.2. LỰA CHỌN CẢM BIẾN 41 2.5.3. CÒI PIEZO BUZZER 42 2.5.4. LED ĐỎ, XANH 44
CHƯƠNG 3: THI CÔNG MÔ HÌNH MÔ PHỎNG HỆ THỐNG CẢNH BÁO VA CHẠM TRƯỚC FCW 45
1.SƠ ĐỒ KHỐI CỦA HỆ THỐNG 45
2.NGUYÊN LÍ HOẠT ĐỘNG CỦA HỆ THỐNG 46 3.LẮP ĐẶT MÔ HÌNH 47
3.1 KẾT NỐI CẢM BIẾN SIÊU ÂM VỚI ARDUINO UNO 47 3.2 KẾT NỐI ĐÈN VÀ CÒI 48
3.3 LƯU ĐỒ THUẬT TOÁN 49 3.4 CODE THỰC HIỆN 50
3.5.HÌNH ẢNH MÔ PHỎNG MÔ HÌNH 55
CHƯƠNG 4: KẾT QUẢ THU ĐƯỢC 56
4.1 KẾT QUẢ THU ĐƯỢC VỀ MẶT LÝ THUYẾT 56
4.2 KẾT QUẢ THU ĐƯỢC VỀ MẶT THỰC TẾ 56 CHƯƠNG 5: KẾT LUẬN 57
CHƯƠNG 6: TÀI LIỆU THAM KHẢO 58
Mục Lục Danh Mục Hình Ảnh hình ảnh 1:
Hệ thống cảnh báo va chạm trên ô tô sử dụng sóng radio để kịp thời phát hiện các chướng ngại vật 6
hình ảnh 2: khoảng cách an toàn và cảnh báo nguy hiểm 7
hình ảnh 3: sơ đồ bố trí hệ thống cảm biến cảnh báo 9
hình ảnh 4: cảm biến tốc độ 10
hình ảnh 5: cấu tạo cảm biến đo tốc độ 11
hình ảnh 6: sơ đồ hệ thống cảm biến tốc độ trên ô tô 12
hình ảnh 7: phản xạ của chùm tia laser 14
hình ảnh 8:Cảm biến radar ô tô phát hiện, định vị người và phương tiện xung quanh ô tô 15
hình ảnh 9: hình ảnh cảnh báo người lái xe khi phát hiện vật cản 16
hình ảnh 10: cảm biến radar phát ra sóng vô tuyến 17 hình ảnh 11:
Chiếc Camera trên kính chắn gió 19
hình ảnh 12:Camera trước xe ô tô phát hiện rủi ro nhanh chóng, hiệu quả 20
hình ảnh 13: màn hình giám sát và điều khiển23
hình ảnh 14: settings trên MID 23
hình ảnh 15: Vehicle Settings 24
hình ảnh 16: Forward Collision Warning Distance 24
hình ảnh 17: Long, Normal or short 25 hình ảnh 18: BACK để trở lại 25
hình ảnh 19: dò người đi bộ của radar27
hình ảnh 20:tia laser hồng ngoại phát ra từ xe27
hình ảnh 21: màn hình quan sát tốc độ và phát hiện vật cản 28
hình ảnh 22: cảnh báo có thể gặp vật cản nguy hiểm 29
hình ảnh 23: biểu đồ mode 30
hình ảnh 24:Sơ đồ nguyên lý hoạt động hệ thống cảnh báo va chạm trước 31
hình ảnh 25:hệ thống cảnh báo mức 1 32
hình ảnh 26: hệ thống cảnh báo mức 233
hình ảnh 27: hệ thống cảnh báo mức 3 33 hình ảnh 28: Mobileye 630 35
hình ảnh 29:Movon MDAS 9 36
hình ảnh 30:Arduino uno r3 38
hình ảnh 31:Cảm biến siêu âm41 hình ảnh 32:Còi Piezo buzzer 43
hình ảnh 33:đèn led 44
hình ảnh 34: Sơ đồ khối của hệ thống 45
hình ảnh 35:sơ đồ đấu nối mô hình 47
hình ảnh 36: lưu đồ thuật toán49
hình ảnh 37: mô hình 55 LỜI NÓI ĐẦU
Đầutiênchophépchúngembàytỏlòngbiếtơnđếnthầyđãhỗtrợnhómchúngem
trongsuốtquátrìnhhọctậpvàthựchiệnmôhìnhmônhọcChuyênđề2.
Vớilòngbiếtơnsâusắcnhất,nhómchúngemxingửiđếnthầylờicảmơnchân
thànhvìđãtruyềnđạtvốnkiếnthứcquýbáuchochúngemtrongsuốtthờigianhọctập
tạitrường.Nhờcónhữnglờihướngdẫntậntình,dạybảocủathầynênđềtài“:
NGHIÊN CỨU LÍ THUYẾT, THIẾT KẾ CHẾ TẠO MÔ HÌNH VÀ ECU ĐIỀU
KHIỂN HỆ THỐNG CẢNH BÁO VÀ VA CHẠM TRƯỚC FCW”củanhómemmới
cóthểhoànthànhmộtcáchtốtđẹp.
Dotìnhhìnhdịchbệnhđangdiễnbiếnphứctạptrongthờigiannày,nênnhóm
chúngemkhôngcóđiềukiệntiếpcậnvớimôhình,sảnphẩmthựctế.Nhưngđồngthời
điềunàycũngmởrachochúngemcơhộitựtraudồikiếnthứcthôngquaviệctìmhiểu,
nghiêncứuvàthiếtkế,chếtạomôhìnhmôphỏnglạihệthốngcảnhbáovachạmtrước
FCW.Bướcđầuđivàothựctếcủanhómchúngemcònnhiềuhạnchếvàbỡngỡnên
khôngtránhkhỏinhữngthiếusót.Nhómchúngemrấtmongnhậnđượcnhữngýkiến
đónggópquýbáutừthầyđểkiếnthứccủachúngemngàycànghoànthiệnhơnđồngthời
cóđiềukiệnbổsung,nângcaoýthứccủabảnthân.
Chúngemxinchânthànhcảmơn! CHƯƠNG 1: TỔNG QUAN
1.1.TỔNG QUAN HỆ THỐNG CẢNH BÁO VA CHẠM PHÍA TRƯỚC
1.1.1.GIỚI THIỆU HỆ THỐNG CẢNH BÁO VA CHẠM PHÍA TRƯỚC FCW
Hệthốngcảnhbáovachạmphíatrướclàmộttínhnăngantoànchủđộngcảnh
báongườiláixetrongtrườnghợpvachạmtrựcdiệnsắpxảyra.Khiphươngtiện
đượctrangbịhệthốngFCWđếnquágầnmộtphươngtiệnkhácphíatrước,tínhiệu
hìnhảnh,âmthanhxuấthiệnđểcảnhbáongườiláivềtìnhhuống.
MộtsốhệthốngFCWmớihơncũngcungcấpcácmứcđộhỗtrợphanhkhác
nhau.Nếuhệthốngcảmthấyrằngngườiláixekhôngphảnứngvớicảnhbáova
chạm,hệthốngantoànsẽápdụnglựcphanhnhẹđểlàmchậmxe.Thậmchícáchệ
thốngmớihơncóthểápdụnglựcphanhmạnhnếungườiláivẫnkhôngphảnhồi.
Ứngdụngphanhcóthểkhônghoàntoàndừngxe,nhưngnócóthểlàmgiảmđáng
kểtốcđộcủaxe,dođóngănngừamộtvụvachạmmạnhhơn.
CáchệthốngFCWcònđượcgọilàPhanhtrướcantoàn,Cảnhbáovachạm
giữatựđộngvớiPhanhtựđộng,Hệthốngcảnhbáovachạmtrướcđâmchết,Hệ
thốngphanhgiảmthiểuvachạm,Chứcnăngvànănglựccủacáchệthốngnàycó
thểkhácnhaurấtnhiều,mặcdùcómộtmụctiêuchunglàngănchặnvachạmvề phíatrước.
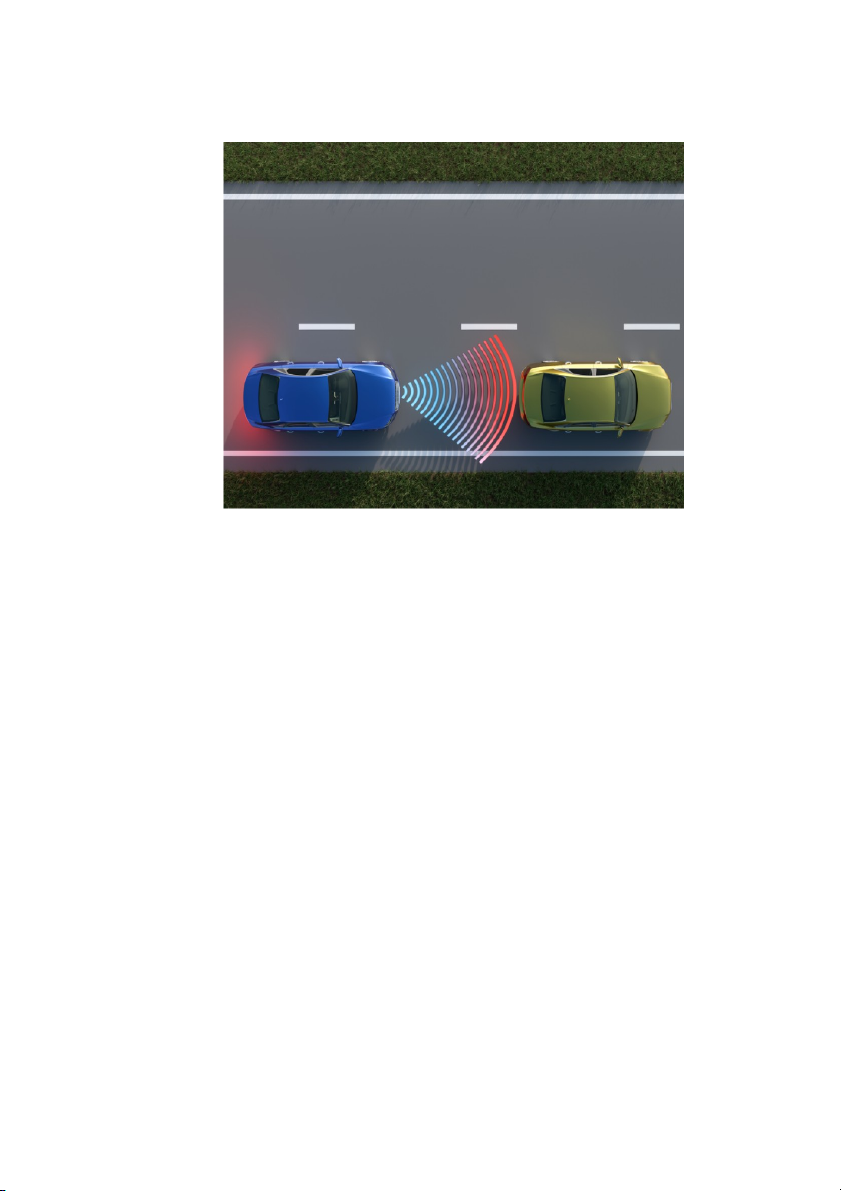
hình ảnh 1: Hệ thống cảnh báo va chạm trên ô tô sử dụng sóng radio để kịp thời phát
hiện các chướng ngại vật
1.1.2.KHI NÀO HỆ THỐNG FCW SẼ HỮU ÍCH?
HệthốngFCWrấthữuíchmỗikhingườiláixecónguycơvachạmvớixe(hoặc,
tùythuộcvàoloạihệthống,ngườiđibộhoặcđộngvật)trựctiếpphíatrước.Một
loạtcáctìnhhuốngtươngđốiphổbiếncókhảnăngkhiếnláixegặprủirocholoại vachạmnày:
Mộthàngxephíatrướcdừnglạiởđènxanhdochướngngạivậtởngãtưvàbạn
đangláiquánhanhvềphíađó.
Ôtôđangđiquágầnnhauvàkhôngđểkhoảngcáchantoàngiữacácphươngtiện.
Chiếcxephíatrướcbấtngờchạychậmlạiđểrẽmàkhôngcótínhiệu.
Chiếcxephíatrướcgiảmtốcnhanhchóngchongườiđibộbăngquađường,
nhưngbạnkhôngchúýngayđếnviệcphanh.
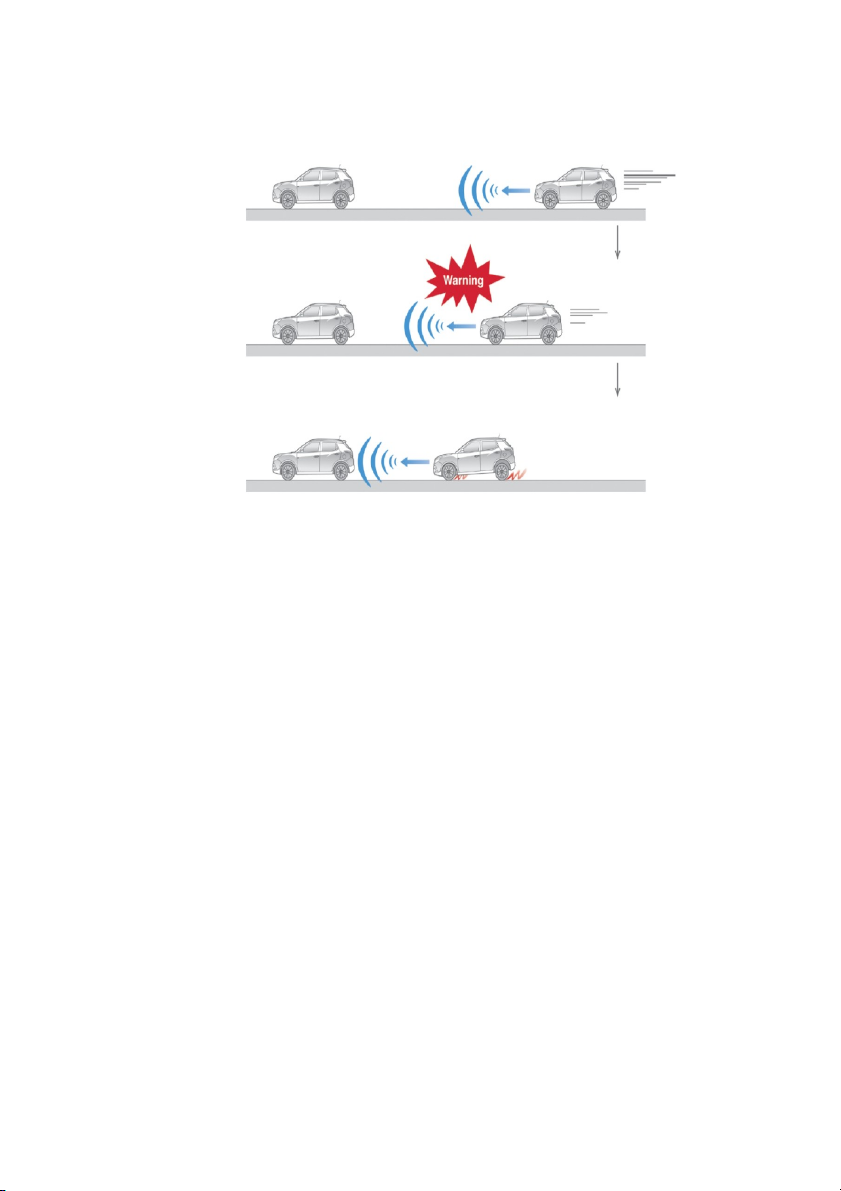
hình ảnh 2: khoảng cách an toàn và cảnh báo nguy hiểm
1.1.3.HẠN CHẾ CỦA HỆ THỐNG FCW?
Hệthốngcảnhbáovachạmcócáctínhnăngthiếtkếvàchứcnăngquantrọng
cóthểảnhhưởngđếncáchchúngthựchiệntrongnhiềutìnhhuốngkhácnhau.Vì
thuậtngữhiệnbaogồmrấtnhiềuloạihệthốngkhácnhau,nêncáckhảnăngcủa
mộthệthốngcóthểsẽkhácvớicáchệthốngkhác.Ngoàiphươngpháppháthiện
(vídụ:radar,laserhoặcmáyảnh)vàloạicảnhbáođượcđưara(nghĩalàâmthanh,
hìnhảnh),mộtsốcáchkhácmàcáchệthốngnàycóthểthayđổibaogồm:
Khả năng phát hiện:Mộtsốhệthốngcảnhbáovachạmcóthểpháthiện
ngườiđibộhoặcđộngvậtlớntrênđườngđicủaxe,nhưngnhữnghệthốngkhác
phùhợpnhấtđểchỉpháthiệncácphươngtiện.Nhữngngườiláixecóhệthống
FCWkhôngthểxácđịnhđượccácmốinguyhiểmchongườiđibộhoặctươngtự
phảinhớrằngchỉvìbáođộngvachạmphíatrướckhôngphátra,khôngnhấtthiếtcó
nghĩalàđườngkhôngcótấtcảcácmốiđedọatiềmẩn.
Tốc độ kích hoạt:Cáchệthốngkhácnhauvềngưỡngtốcđộxảyrakíchhoạt.
Cụthể,nhiềuhệthốngFCWkhôngđượcthiếtkếđểkíchhoạtdướitốcđộ40km/h.
Cáchệthốngkháchiểnthịthuộctínhđốidiệnnơichúngđượcthiếtkếđểhoạtđộng
tronggiaothôngđôthịdàyđặcvàdođócáchệthốngnàychỉhoạtđộngởtốcđộ dưới30km/h.
Hiệu suất trong thời tiết bất lợi:Hiệusuấtcủacáchệthốngcảnhbáova
chạmdựatrênmáyảnhcóthểbịảnhhưởngtrongđiềukiệnthuđượchìnhảnhrõ
ràngcủaconđườngphíatrước,vídụnhưtrongmưalớn,sươngmùdàyđặc,điều
kiệnrấtsánghoặccàiđặtánhsángyếu.
Đặc điểm trên đường:Cáctrườnghợpkhácmàcảnhbáovachạmcóthể
khôngphátraâmthanhhoặckhôngphátrasớmlàxungquanhcácđườngcongsắc
néttrênđườnghoặcleolênnhữngngọnđồidốc(nơicảmbiếncókhảnăngkhông
thểpháthiệnraphươngtiện).
Nhìnchung,tấtcảcáchệthốngcảnhbáovachạmsẽhoạtđộngtốttrong
trườnghợpxexuấthiệnđộtngộthoặcngườiđibộbướcrađường.Điềunàylàdo
cáchệthốngnàyxácđịnhkhảnăngxảyratainạnbằngcáchtínhtốcđộcủacácvật
thểtrênđườngđicủaxevàsosánhvớitốcđộmàxeđangtiếntớichướngngạivật đó.
1.2.CẤU TẠO VÀ HOẠT ĐỘNG CỦA HỆ THỐNG.
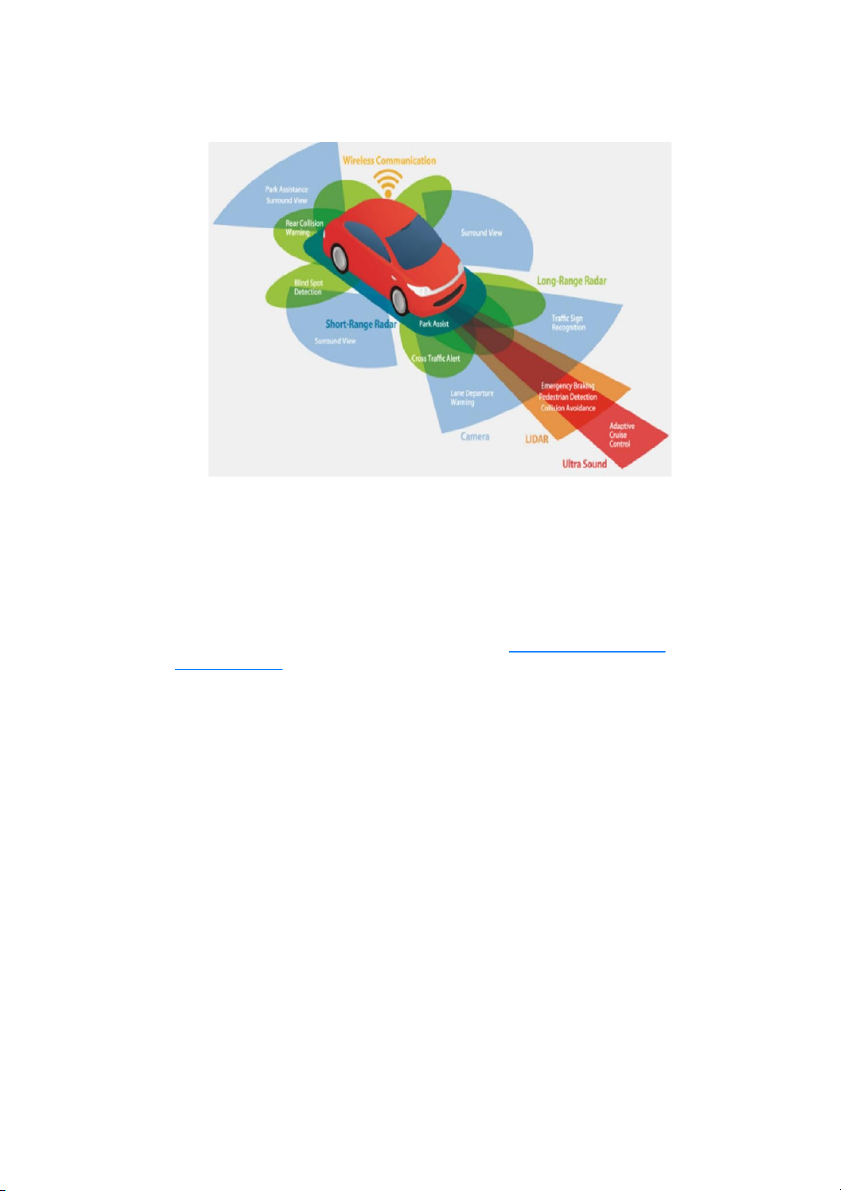
1.2.1.CẤU TẠO THÀNH PHẦN CỦA HỆ THỐNG
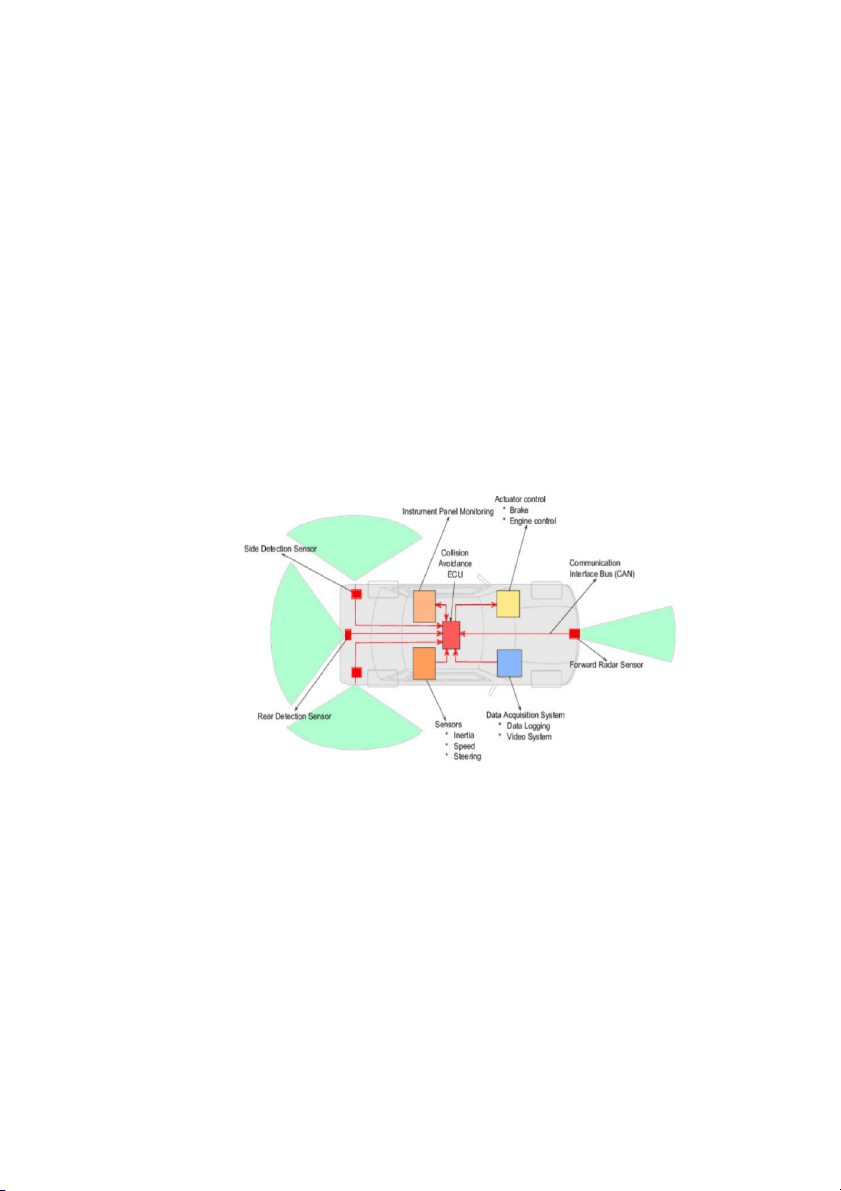
hình ảnh 3: sơ đồ bố trí hệ thống cảm biến cảnh báo
Hệthốngcảnhbáovachạmtrướcbaogồmcácbộphậnsauđây: Cảmbiếntốcđộ
Cảmbiếnlazer/hồngngoại Radar Camera
Bảngđiềukhiểngiámsát
1.2.2.CẢM BIẾN TỐC ĐỘ
1.2.2.1.ĐỊNH NGHĨA CẢM BIẾN TỐC ĐỘ TRÊN Ô TÔ
Cảm biến tốc độôtôlàmộtbộphậnnằmtronghệthốngphanhđiệntử,cóchức
năngđotốcđộdichuyểncủaphươngtiện.Theođó,khitốcđộcủaxeđộtngột
thayđổi,ngườiđiềukhiểnvẫnsẽkiểmsoátđượchướnglái,hạnchếsựvăngtrượt.
CảmbiếnđotốcđộthuộcdòngcảmbiếnHall.Ưuđiểmcủaloạinàylàcókhả
năngpháthiệntốcđộởgiátrịbằngkhông.Bộphậnsẽtạoratínhiệuthôngqua
mứctiêuthụhiệntạivàtạoradòngđiệntínhiệuthấpđưađếnhệthốngđiềukhiển
độngcơ-ECM(EngineControlModule).
hình ảnh 4: cảm biến tốc độ
1.2.2.2.CẤU TẠO CẢM BIẾN TỐC ĐỘ TRÊN Ô TÔ
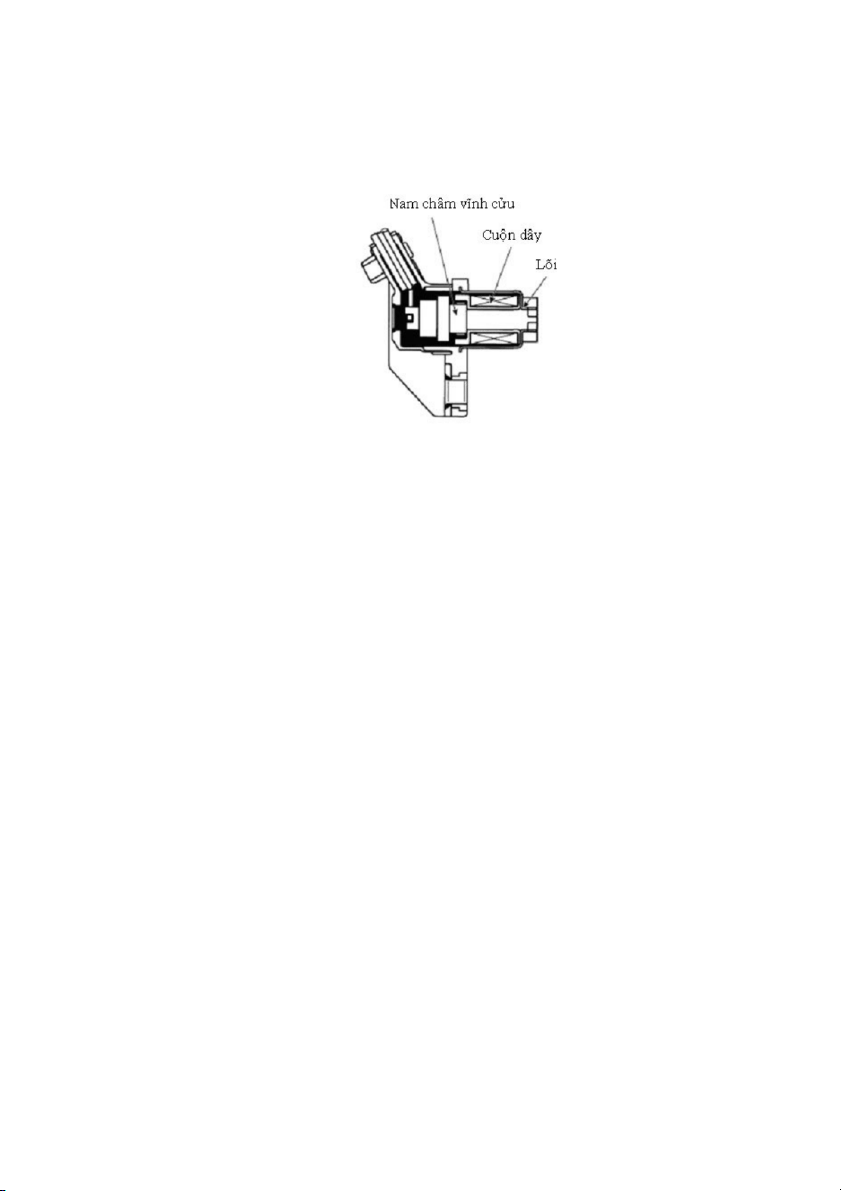
Cảmbiếngiảmtốccócấutạogồmmộtnamchâmvĩnhcửu,mộtlõitừvà
cuộndây.Tùytheotừngkiểuxemàvịtrílắpđặtcũngkhácnhau.Thôngthường,
cảmbiếnđotốcđộđượcđặtởhốcbánhxekhicảbốnbánhcủaphươngtiệnđều
sửdụngđĩaphanh.Ngoàira,trongnhiềutrườnghợp,bộphậnnàynằmởhộpvi
saikhibánhsauxecótrangbịphanhtangtrống.Đâylàcấutạocơbảncủamột
cảmbiếnđotốcđộôtôởhầuhếtcácdòngxehiệnnay.
hình ảnh 5: cấu tạo cảm biến đo tốc độ
1.2.2.3.NGUYÊN LÝ HOẠT ĐỘNG CỦA CẢM BIẾN TỐC ĐỘ Ô TÔ
Hệthốngcảm biến tốc độxehơihoạtđộngdựatrênnguyênlýcảmứngtừ.
Bộphậncócấutạonamchâmliênkếtvớibánhrăngkimloại.Dođó,khibánhxe
quay,phầnbánhrăngnàysẽđồngthờichuyểnđộngtheo.Lúcnày,cácrăngtrượt
quanamchâmsẽtạonêndòngđiệnxoaychiều,đượchiểulàtínhiệuđiện.Sauđó,
cáctínhiệusẽđượcbáothôngquasốlượngxung,truyềnvàobộmạchcảmbiến
tốcđộvàtínhtoánvậntốccủaxe.Đâychínhlànguyênlýlàmviệccủacảmbiến tốcđộ.
hình ảnh 6: sơ đồ hệ thống cảm biến tốc độ trên ô tô
1.2.2.4.CÁC LOẠI CẢM BIẾN TỐC ĐỘ Ô TÔ
Hiệnnay,thịtrườngcóhailoạicảmbiếnchínhđượctrangbịđểđotốcđộô tôgồm: Cảm biến hở
Cảmbiếnhởcócấutạogồmvòngkimloạivàđầuđọctáchrờinhau.
Điểmhạnchếcủacảmbiếnnàylàdễbịbámbụi,cáthoặccácmảnh
kimloại.Điềunàygâynênnhữngtácđộngtiêucựcchoquátrìnhhoạt
độngcủahệthống,cụthểlàlàmbiếnđổidòngcảmứngthuđược.
Trongtrườnghợpbộphậngặptrụctrặc,đènbáoABScủaphanhsẽ sáng. Cảm biến kín
Cảmbiếnkíncóthiếtgồmnamchâmvàbánhrăngkimloạikhítlạivới
nhaunênkhắcphụcđượctìnhtrạngbịbụibẩnbámvào.Dođó,loại
cảmbiếnnàyítphảibảodưỡng,lauchùivàgiúpphươngtiệnhoạtđộng
ổnđịnhvàhiệuquả.
Hiệnnay,mỗidòngôtôsẽđượctrangbịmộtloạicảmbiếntốcđộbánhxe
khácnhau.Chủphươngtiệncóthểmởhệthốngphanhvàtìmkiếmởmặtsau
đểxácđịnhchínhxác.
1.2.3.CẢM BIẾN LAZER/HỒNG NGOẠI 1.2.3.1. ĐỊNH NGHĨA
Côngnghệsửdụngtialaserđểđokhoảngcáchvàxâydựngbảnđồ3Dcủa
vậtthể,bằngcáchphátravàthunhậntialaserphảnhồilạirồiphântíchcácdữ
liệuđóđểchorakếtquảmongmuốn.Phạmviđượcxácđịnhbằngcáchđo
khoảngthờigiangiữaphátxạvàkếtquảphảnhồi.
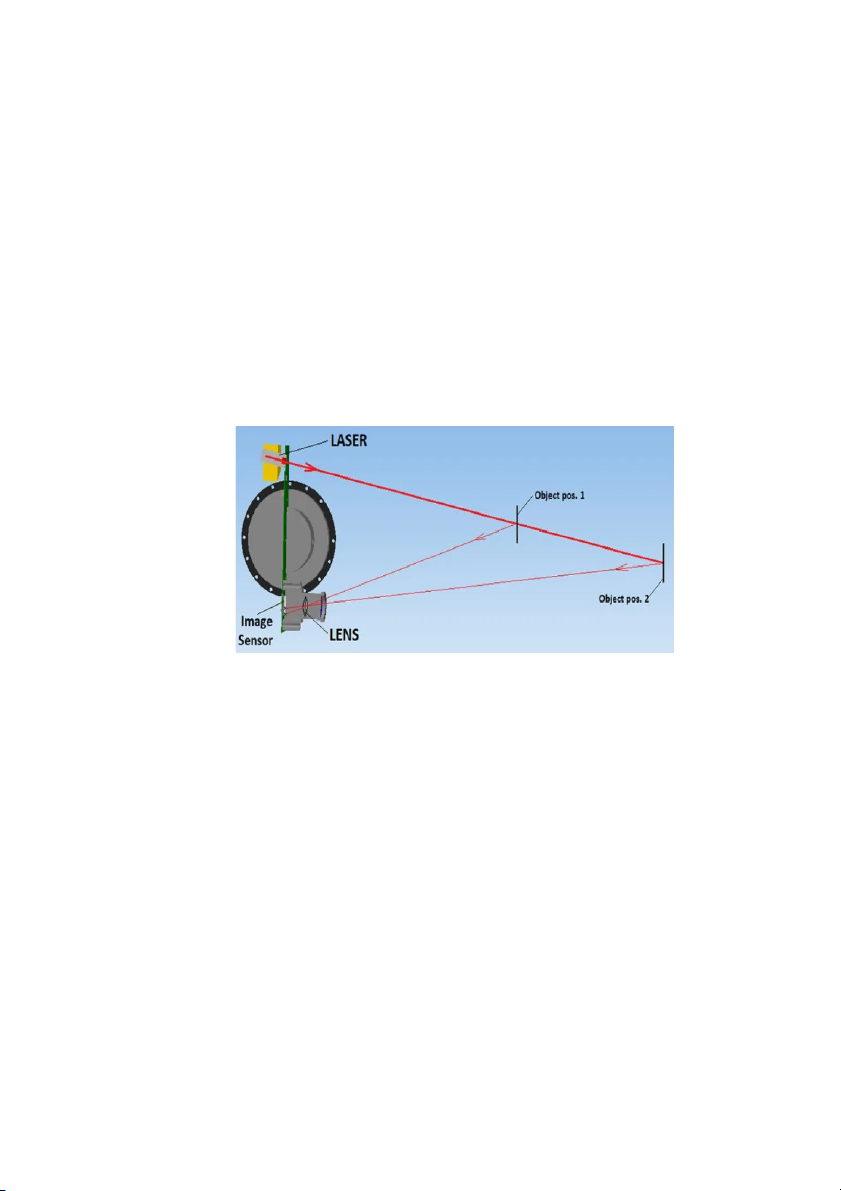
1.2.3.2.NGUYÊN LÍ HOẠT ĐỘNG
hoạtđộngbằngcáchbắnracựcnhanhcácchùmtialaser(lênđến900.000
lần/giây)vàomộtchủthể,bềmặtvàsauđóđođạcthờigianđểánhsángbậtra
khỏimụctiêuđóvàquayngượctrởlại.
Vìtốcđộánhsánglàhằngsốbấtbiến,chúngtacóthểtìmrakhoảngcáchđến
vậtthểtheocôngthức:
Khoảng cách = (Tốc độ ánh sáng x Thời gian bay) / 2
hình ảnh 7: phản xạ của chùm tia laser 1.2.4.RADAR
1.2.4.1.RADAR Ô TÔ LÀ GÌ?
Radarôtôlàmộtthiếtbịnhỏđượcsửdụngđểpháthiệntốcđộvàphạmvidi
chuyểncủacácđốitượngtrongvùnglâncậncủaôtô.Radarôtôbaogồmmộtmáy
phátvàmộtmáythu.Máyphátcónhiệmvụphátracácsóngvôtuyếnđậpvàomột
vậtthểvàphảnxạtrởlạimáythu,xácđịnhkhoảngcách,tốcđộvàhướngcủavật
thểđểcảnhbáochongườidùng.Cảmbiếnradarôtôrấtnhạykhipháthiệnvàđịnh
vịcácphươngtiệnkhác,đặcbiệtkhiđangđivớitốcđộnhưtrênđườngcaotốc.
hình ảnh 8:Cảm biến radar ô tô phát hiện, định vị người và phương tiện xung quanh ô tô
Radarôtôlàcôngnghệcảmbiếnhàngđầuhiệnnaygiúptăngđộantoànkhi
láixetrongmọiđiềukiệnmôitrường.Đếnnay,radarôtôđangđượcứngdụngtrên
nhiềumẫuxehơicaocấpđểkíchhoạtcáctínhnăngantoànvàtiệnnghitrênxe,
nhằmđiềuchỉnhtốcđộdichuyểntựđộngmàkhôngcầnsựthamgiacủangườilái.
Trongtươnglaikhôngxa,cảmbiếnradartrênôtôsẽtrởthànhtrợthủđắclực
củangườiđiềukhiểnkhithamgiagiaothôngđểgiảmthiểutốiđavachạm.Đồng
thời,đâycũnglàcôngnghệquantrọngđểhướngđếnngành công nghiệp ô tô không người lái.
1.2.4.2.NGUYÊN LÍ HOẠT ĐỘNG
Cảm biến radar ô tôđượcsửdụngđểxácđịnhkhoảngcáchvàtốcđộcủacác
đốitượngđứngimhoặcdichuyểnxungquanhôtô.Thiếtbịradarphátrasóngvô
tuyến,chạyvớitốcđộcựcnhanhvàphảnxạtrởlạiradarkhicóvậtthểtrênđường
đicủanó.Cácradarôtôchotầmxađiểnhìnhcóthểđocácvậtthểcáchxa300m đến500m.
Cácthiếtbịradarkhihoạtđộngsẽphátranhữngđợtsóngradar.Khigặp
chướngngạivật,sóngradarsẽlậptứcdộingượclạicảmbiến.Dựavàothờigian
sóngdichuyểnrồiphảnứnglại,vixửlýtrungtâmcủaxeôtôsẽtínhtoánra
khoảngcáchtừxetớichướngngạivậtphùhợpvớitốcđộvàhướngđicủangười
điềukhiểnhiệnthời.
Nếukhoảng cách giữa hai xekhôngđảmbảoantoàn,cáchệthốngcảnhbáo
trênôtôsẽđưaranhữngcảnhbáocholáixethôngquabảngđiềukhiển,đènbáo,
thậmchíbằngâmthanh.Khikhoảngcáchquágầnmàláixekhôngphảnứng,hệ
thốngsẽtựđộngcanthiệpquacáchệthốngkhácnhưphanhtựđộng,căng dây an
toànhaytúi khí...đểbảovệhànhkhách,hạnchếtốiđavachạmxảyra.
hình ảnh 9: hình ảnh cảnh báo người lái xe khi phát hiện vật cản 1.2.4.3.PHÂN LOẠI
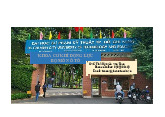
Cảmbiếnradarôtôđượcphânthànhhailoại:radartầmngắn(SRR)vàradar tầmdài(LRR).
hình ảnh 10: cảm biến radar phát ra sóng vô tuyến
Phân loại cảm biến radar ô tô
Radar tầm ngắn (SRR)sửdụngtầnsố24GHzvàđượcsửdụngchocácứng
dụngquansátcóphạmvigầnnhưpháthiệnđiểmmù,hỗtrợđỗxehaypháthiện
cácchướngngạivậtởcựlygần.Cácradarnàycầnmộtăng-tenđểcóthểquansát
đượcvớigócquétlớn,tạoratầmnhìnquansátrộngđểđảmbảođộchínhxáctối đa.
Radar tầm dài (LRR)sửdụngtầnsố77GHz(thôngthườngdaođộngtừ76-
81GHz)cungcấpđộchínhxácvàđộphângiảitốthơnsovớiradartầmngắn.
Chúngđượcsửdụngđểđokhoảngcáchvàtốcđộcủacácphươngtiệnkháckhi
đangdichuyểnngượchướngxeôtô,đồngthờiradartầmdàicòngiúppháthiệncác
đốitượngtrongphạmviquansátrộnghơn.Hệthốngradartầmxa(LRR)cungcấp
phạmviquansáttừ80mđến200mhoặclớnhơn.
1.2.4.4.ƯU ĐIỂM CỦA RADAR
Cảmbiếnradarôtôkhôngbịảnhhưởngbởinhiệtđộcủamôitrườnghaybị
chắnbởivậtcản,ngượclạichúngcungcấpmộtphạmvihoạtđộngrộngvớigóc
quétlớnvàkhôngcógócchết.
Radarôtônhưmột“trợlýhànhtrình”giúpngườiláiyêntâmhơntrongquá
trìnhdichuyển,đặcbiệtlàtrongđiềukiệnthờitiếtcómưa,sươngmùhaytrờitối...
Lúcnày,ngườiđiềukhiểnxeôtôkhôngcầnquálolắngvềviệcphảitựdòvàquan
sátđường,khôngbịcăngthẳngvàmấttậptrungkhiláixe.
Vớinhữngưuđiểmvượttrội,cảmbiếnradarôtôđượcứngdụngvàonhiều
tínhnăngantoàntrênôtônhằmđảmbảoantoàntốiđachongườiđiềukhiển,đồng
thờimangđếnnhữngtrảinghiệmláithúvị. 1.2.5.CAMERA
Camera hành trình phía trước oto
Camera hành trình ô tôcòngọilàhệthốngđacảmbiếnvớicamera.Đâylà
thiếtbịđượclắpđặttrênôtôvớimụcđíchtheodõihànhtrìnhxe,chỉđườngthông
quahệthốngGPS,đọcbiểnbáogiaothông,cảnhbáotốcđộxevàcácphươngtiện
kháctrongsuốtquátrìnhdichuyển.
Ngàynay,vớicôngnghệpháttriển,cácnhàsảnxuấtlinhkiệnđãphátminhra
nhiềuloạicamerahànhtrìnhôtôvớivịtrívàmụcđíchsửdụngkhácnhau.Bên
cạnhcácloạicameratruyềnthống,cameralùiôtô,cameragươngchiếuhậuthì
cameraphíatrướcxeôtôlàmộttrangbịhỗtrợhànhtrìnhvôcùngcầnthiếtchoxế hộp.
Camera trước xe ô tôlàloạicamerađượclắpđặtởphíatrướcxegiúptàixế
sẽdễdàngquansátđượctấtcảnhữnggìxảyraphíatrướchoặchaibênđầuxetrong
quátrìnhvậnhànhhoặcdừng,đỗxe.
hình ảnh 11: Chiếc Camera trên kính chắn gió
1.2.5.1.VAI TRÒ, CHỨC NĂNG
Sởhữu“hệthốngđacảmbiến”,camera trước xe ô tôgiúpngườiláipháthiện
cácrủirophíatrướcxebằngcôngnghệxửlýhìnhảnhchấtlượngcao.
Theođó,camerasẽquansátdiễnbiếnvàtruyềnthôngtinvềmànhìnhđược
lắpđặtởkhoanglái,khigặpcáctìnhhuốngsẽphátâmthanhhoặctruyềntínhiệu
cảnhbáođếnmànhình.Đâylàmột“trợlý”đángtincậygiúpngườiđiềukhiển
phươngtiệncóthểdễdàngdichuyểntrongcáckhuvựcđôngdâncư,đườngxánhỏ
hẹp,ngõchợhoặcbờmương.
hình ảnh 12:Camera trước xe ô tô phát hiện rủi ro nhanh chóng, hiệu quả
Khôngchỉquansátdiễnbiếngiaothông,hệthốngcamera trước xe ô tôcòn
giúpchủxelưutrữhìnhảnhởmọithờiđiểmđểphụcvụchoviệckiểmchứngvà
tìmkiếmlạithôngtinhànhtrình.
Đốivớihệthốngnày,mộtcamera trước xe ô tôcókhảnăngđảmnhậnnhiều
vaitròđểgiúptránhcácrủirokhácnhaucóthểxảyraphíatrướcvàbênhôngxe.
–Cameralắpđặtởphíatrướcôtôgiúpngườiláighilạinhữnghìnhảnhhoặc
diễnbiếnxảyratrongquátrìnhxedichuyển:
+Cảnhbáovachạmphíatrước:Camerapháthiệnvậtcảnhoặccácphương
tiệngiaothôngphíatrướcxevàtruyềnthôngtintớihệthốngmànhình,phátraâm
thanhhoặctínhiệucảnhbáo.
+Quansátngườiđibộ:Khipháthiệnngườiđibộgầnvịtríxe,camerasẽghi
lạihìnhảnhvàtruyềnthôngtinđếnmànhinhchính.Điềunàynhắcnhởngườilái
giảmtốcđộkịpthờivàgiúpgiảmthiểutainạnngoàiýmuốndoláixebấtcẩn.
+Cảnhbáochệchlànđường:Camerapháthiệnxelấnlàntrongquátrìnhdi
chuyểngiúpngườiđiềukhiểntránhkhỏinhữnglỗicơbảnkhithamgiagiaothông.
–Cameratrướcxeôtôlàminhchứngchongườiđiềukhiểnphươngtiệntrong
trườnghợpkhôngmaygặpphảisựcốvachạmhoặctrườnghợpbạnbịbắtnhầm, phạtnhầm.
–Cùngvớicáchệthốngcamerakhác,cameratrướcxeôtôcókhảnăngquan
sátdiễnbiếnbấtthường,đặcbiệtlàtìnhhuốngtrộmcắpkhichủxekhôngởgần.
–Khôngchỉvậy,cameratrướcxeôtôcònđượcxemlàmộtthiếtbịgiảitríthu
nhỏgiúplưugiữnhữngcungđườngvànhữngkhoảnhkhắcđẹpnhấttrongquátrình
thamgiagiaothônghằngngày.
1.2.5.2.CÁC LOẠI CAMERA TRƯỚC XE PHỔ BIẾN HIỆN NAY
Nhằmđápứngtốiđađamụcđíchsửdụngcủangườiđiềukhiểnxe,hiệnnay
trênthịtrườngcórấtnhiềuloạicamera trước xe ô tôtíchhợpnhiềutínhnănghiện
đại,vượttrội.Dướiđâylàphânloạicácdòngcameratrướcphổbiến,dựatheochức
năngcósẵntrongmáy: Cameragócrộng360:
Theokinhnghiệmthựctếcủacácnhàsảnxuấtphụtùngvàtàixế,thiếtbị
ghihìnhcógócquansátrộngbaonhiêuthìcảnăngbaoquáttìnhhuốngcàng
tốtbấynhiêu.Bởivậycácnhàcungcấpđãđưarathịtrườngnhữngsảnphẩm
cóốngkínhgócrộngtừ150-170độ.Điềunàygiúpngườitàixếđảmbảogóc
nhìnbaoquátkhiđiềukhiển,tránhgóckhuất,hạnchếđiểmmù.
Camerahồngngoại/banđêm
Cameratrướcxeôtôhồngngoạicũngcôngcụhỗtrợđắclựcchongười
sửdụngtrongviệcdichuyểntrongđiềukiệncungđườngtốihẹp,thiếuánh
sángvàobanđêm.Đồngthờiloạicameranàycònhỗtrợlùi,tấphoặcđỗxe vàobuổitối
Camerakhôngdây,tíchhợpwifi
Thôngthườngcamera trước xe ô tôđượcnhàsảnxuấttíchhợptínhnăng
kếtnốicácmạngkhôngdây(nhưWifihayBluetooth).Điềunàygiúpmáyghi
hìnhnàycóthểkếtnốitrựctiếptớihệthốngmànhìnhtrungtâmcủaôtô,thiết
bịđiệnthoại,máytínhđểtruyềntảidữliệutrựctiếpchochủphươngtiệntrong
khithamgiagiaothônghoặcngaycảkhikhôngcómặttrênxe.
Tíchhợpvớicamerahànhtrình
Vớisựpháttriểncủacôngnghệhiệnđại,tântiến,camera trước xe ô
tôđượctíchhợpvớihệthốngcácloạicamerahànhtrìnhkháctrênôtônhư:
cameralùixeôtô,cameragươngchiếuhậu...Cáchìnhảnhnàyđượctổnghợp
vàtruyềndữliệuvềhệthốngmànhìnhtrungtâmcùngmộtlúcgiúpngườilái
baoquátđượcmọidiễnbiếnvàxửlýtìnhhuốngtốtnhấttrongquátrìnhđiều khiểnxe.
1.2.6.BẢNG GIÁM SÁT VÀ ĐIỀU KHIỂN
hình ảnh 13: màn hình giám sát và điều khiển
1.2.6.1.CÀI ĐẶT FCW TRÊN ACURA
1. Nhấn nút cài đặt (SETTING)
hình ảnh 14: settings trên MID
Chọn settings trên MID
2. Chọn Cài đặt XE (VEHICLE)
hình ảnh 15: Vehicle Settings Chọn Vehicle Settings
3. Chọn CẢNH BÁO KHOẢNG CÁCH VA CHẠM PHÍA TRƯỚC
(FORWARDCOLLISIONWARNINGDISTANCE)
hình ảnh 16: Forward Collision Warning Distance
Chọn Forward Collision Warning Distance
4. Chọn DÀI, BÌNH THƯỜNG hoặc NGẮN (LONG,NORMALor SHORT)
hình ảnh 17: Long, Normal or short
Chọn Long, Normal or short
5. Nhấn nút TRỞ LẠI (BACK) khi kết thúc
hình ảnh 18: BACK để trở lại
Nhấn BACK để trở lại
1.3.NGUYÊN LÍ HOẠT ĐỘNG CỦA HỆ THỐNG CẢNH BÁO
1.3.1.CÁCH THỨC HOẠT ĐỘNG
Giốngnhưcáchệthốngantoànkháccóchungcácbộphậnnhưngthựchiện
cácchứcnăngkhácnhau(đángchúýlàhệthốngchốngbócứngphanhvàkiểmsoát
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445