Tại sao cần sự ra đời của hệ thống CAN? | Tài liệu môn Công nghệ kĩ thuật ôto Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Hệ thống điện tử trên xe bắt đầu từ những năm 1970. Từ những ngày đầu tiên khi ứng dụng vào hệ thống đánh lửa điều khiển bằng IC, đã xuất hiện hộp điều khiển động cơ ECM. Do công nghệ điện tử có quá nhiều ưu điểm so với điều khiển bằng cơ khí thông thường nên công nghệ này đã phát triển không ngừng dẫn đến sự ra đời của hàng loạt hệ thống tiếp theo như hệ thống cân bằng điện tử ESP, hệ thống mã hóa động cơ immobilizer, Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Công nghệ kĩ thuật oto (OTO21) 155 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:



Preview text:
Tại sao cần sự ra đời của hệ thống CAN?
Hệ thống điện tử trên xe bắt đầu từ những năm 1970. Từ những ngày đầu tiên khi ứng
dụng vào hệ thống đánh lửa điều khiển bằng IC, đã xuất hiện hộp điều khiển động cơ
ECM. Do công nghệ điện tử có quá nhiều ưu điểm so với điều khiển bằng cơ khí thông
thường nên công nghệ này đã phát triển không ngừng dẫn đến sự ra đời của hàng loạt
hệ thống tiếp theo như hệ thống cân bằng điện tử ESP, hệ thống mã hóa động cơ
immobilizer, hệ thống chìa khóa thông minh Smart Key, hệ thống hỗ trợ đỗ xe Parking
Assist, …. Ngày nay tất cả hệ thống trên xe đều ứng dụng hệ thống điều khiển điện tử và điều khiển.
Và trong những ngày đầu tiên, các hộp được nối trực tiếp với nhau từng điểm một là
chuyện hết sức bình thường vì khi đó số lượng hộp trên xe là không nhiều, chỉ được
hộp điều khiển động cơ, có thể có thêm hộp điều khiển hộp số và đôi khi là hộp điều khiển phanh ABS.
Thế nhưng bây giờ, trên 1 chiếc xe bình thường trung bình có khoảng 30 hộp điều
khiển khác nhau chưa kể các xe sang có thể lên đến hàng trăm hộp, tất cả các hệ
thống trên xe dù là nhỏ nhất: điều khiển ghế ngồi, điều khiển mở cốp, điều khiển âm
thanh, … đều có hộp riêng. Tất cả hộp này phải nối với nhau thì mới có thể lấy được tín hiệu của nhau.
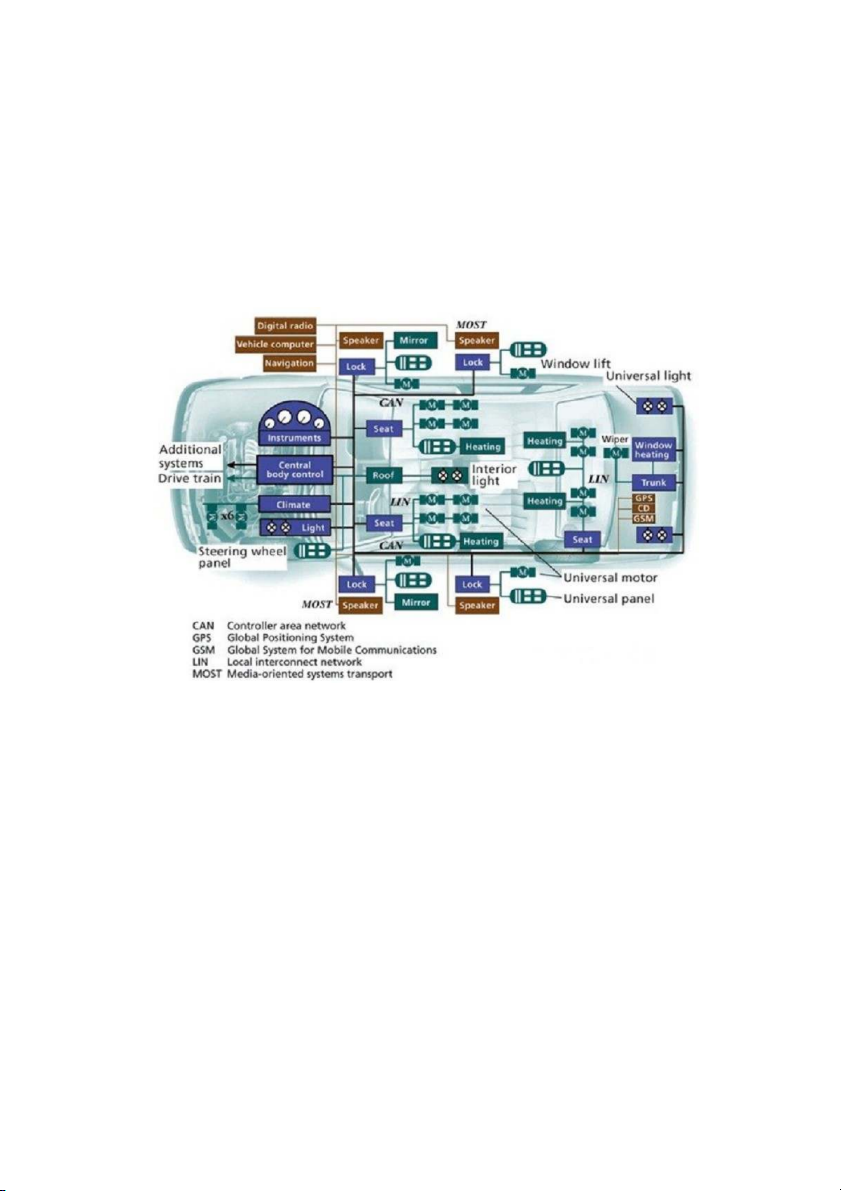
Như vậy nếu vẫn sử dụng kiểu kết nối truyền thống bằng dây điện thông thường từng
điểm một (point to point) với nhau thì đường dây của 1 chiếc xe sẽ vô cùng phức tạp
và có nhiều nhược điểm. Vì vậy cần có 1 giải pháp tối ưu hơn để giải quyết sự liên kết
giữa các hộp điều khiển mà không cần tăng số lượng dây dẫn. Và từ đó, hệ thống
mạng giao tiếp trên ô tô CAN ra đời và được sử dụng đến ngày nay.
Phân loại mạng giao tiếp CAN
Có 2 loại đường truyền CAN khác nhau thường được sử dụng được phân loại dựa trên
tốc độ truyền tín hiệu điển hình.
1. Đường truyền HS-CAN là đường truyền tốc độ cao được sử dụng để liên lạc
giữa các hệ thống truyền lực, gầm và một số hệ thống điện thân xe Đường
truyền HS-CAN được dùng để gọi “Đường truyền CAN No.1” và “Đường truyền CAN No.2”.
Nó hoạt động ở tốc độ khoảng 500 kbps. Các điện trở cực cho đường truyền CAN No.1
được đặt ở trong ECU trung tâm và CAN No.2 J/C. Điện trở của đường truyền CAN
No.2 không thể đo được từ giắc DLC3.
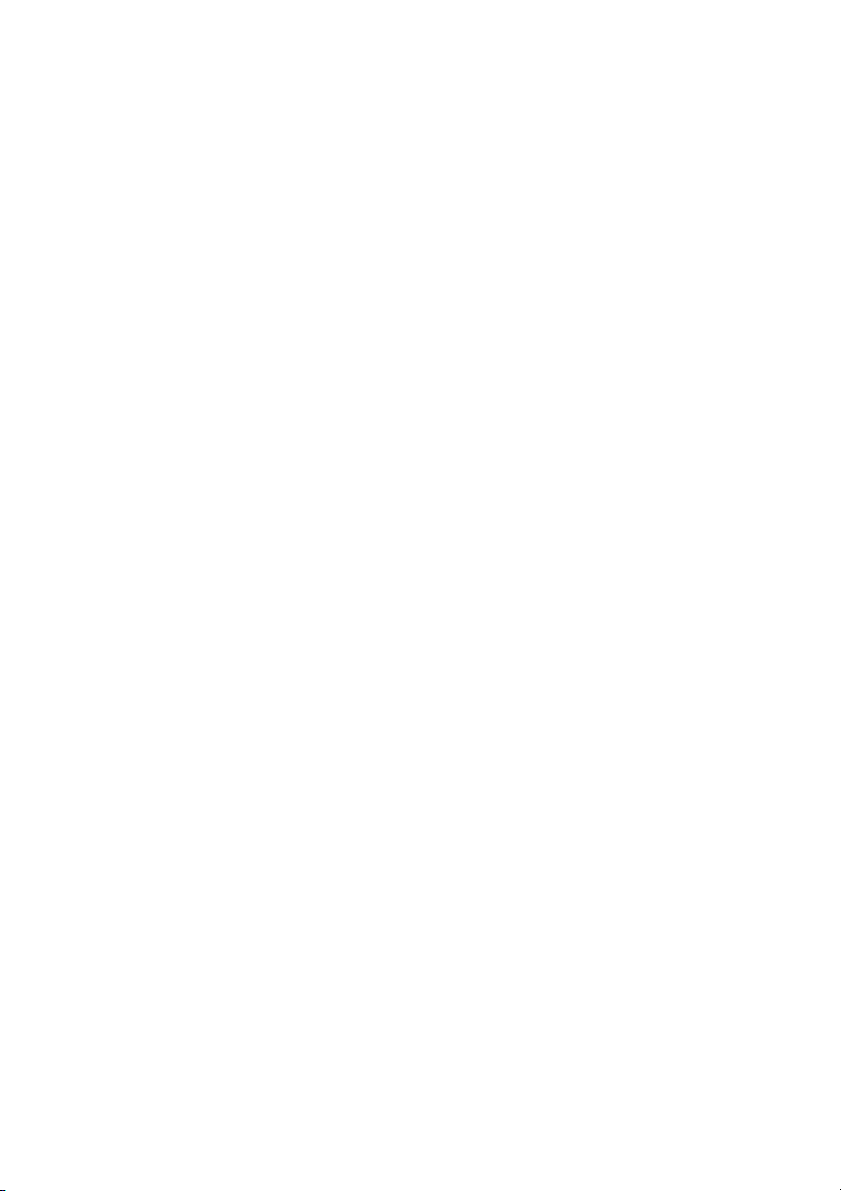
1. Đường truyền MS-CAN là đường truyền tốc độ trung bình được sử dụng để liên
lạc giữa các hệ thống điện thân xe Đường truyền MS-CAN được gọi là “Đường
truyền CAN MS”. Nó hoạt động ở tốc độ khoảng 250 kbps. Các điện trở cực cho
đường truyền MS-CAN được đặt ở trong ECU thân xe chính và ECU chứng
nhận. Điện trở của đường truyền CAN MS không thể đo được từ giắc DLC3.
Đường truyền MS-CAN
Việc thông tin liên lạc giữa những mạng này được thực hiện qua ECU thân xe (cho
đường truyền CAN MS) hay ECU trung tâm (cho đường truyền CAN No.2), có vai trò như một ECU trung tâm.
Cách gửi – nhận dữ liệu trên hệ thống mạng giao tiếp CAN
Trong mạng CAN, các thành phần nối với mạng có quyền ngang nhau trong việc truyền
và nhận thông tin ( multi master ), và bất kỳ các thành phần đó đều có thể truyền cũng
như nhận thông tin mà chúng cần từ các thành phần khác. Tuy nhiên, về thứ tự truyền
thì tùy thuộc vào độ ưu tiên của thông tin mà chúng muốn truyền ( cái này được quy
định trong cấu trúc của tập tin được truyền đi), cái này là để chống quá tải khi có nhiều
thành phần cùng truyền và nhận. Mạng giao tiếp CAN
Mỗi module được gắn vào một mạng lưới dữ liệu có khả năng gửi và nhận tín hiệu và
chúng đều có địa chỉ của mình trên mạng lưới cho phép các module nhận được các
thông tin đầu vào và các dữ liệu cần thiết để hoạt động. Khi module truyền thông tin
qua mạng lưới, các thông tin này sẽ được mã hóa để tất cả các module khác nhận ra
nó đến từ đâu và gửi thông tin gì.
Dữ liệu được gửi là một loạt các bit kỹ thuật số bao gồm “0” và “1 “. Thông số điện áp
thấp tương ứng với giá trị “0”, giá trị đo điện áp cao tương ứng với “1”. Thông thường
điện áp thực tế tại đây sẽ được hoạt động trong phạm vi 5-7 volt.
Thông thường các module điều khiển hoặc cụm mô đun trên xe được giao nhiệm vụ
quản lý lưu lượng mạng. Khi các module thấy một thông điệp tới, nó sẽ nhìn vào bit đầu
tiên trong dòng dữ liệu. Nếu bit là một “0”, nó sẽ được ưu tiên hơn các thông điệp khác,
được gọi là một “trội tin nhắn”. Nếu bit đầu tiên là một “1” được cho một ưu tiên thấp
hơn được gọi là một “lặn tin nhắn”.
Như vậy, thông điệp ưu tiên cao nhất luôn được thông qua đến các địa điểm dự định
của nó và những thông điệp ưu tiên thấp sẽ có thể tạm thời bị chặn cho đến khi “giao
thông trên đường truyền giảm tốc”.
Có thể thấy mạng giao tiếp CAN đã giúp 1 chiếc xe ô tô bình thường trở nên
“thông minh” và tiện lợi hơn rất nhiều. Hi vọng qua bài viết trên, các bạn đã hiểu
hơn về mạng giao tiếp CAN trên ô tô.
V. Hệ thống CAN bị Lỗi và nguyên nhân
Xe có hệ thống CAN có thể dễ bị lỗi điện tử như những chiếc xe cũ. Mặc dù
hệ thống CAN sử dụng ít dây và ít kết nối để giảm trọng lượng và chi phí,
nhưng nó lại sử dụng nhiều module và các module phức tạp hơn.
Vấn đề giao tiếp có thể xảy ra lỗi nếu kết nối module trở nên bị ăn mòn hoặc
lỏng, nếu dây mass có điện trở lớn, quá thiếu hoặc đứt, hoặc hệ thống điện
áp thấp hơn thông số kỹ thuật. Một số module thậm chí có thể quên thiết lập
vị trí của họ hoặc nếu acquy bị ngắt kết nối – bị chết.
Trên một số minivan Chrysler, ví dụ: Hệ thống kiểm soát làm lạnh tự động
sẽ bỏ làm việc nếu acquy ngắt kết nối do động cơ bước điện điều khiển vị trí
của các cửa blend quên vị trí. Hệ thống này phải được đưa vào một chế
độ “học lại” để thiết lập lại tất cả các địa điểm và các thiết lập cơ.
Các module trong hệ thống CAN cần một số lượng điện áp nhất định cho các
thiết lập của nó để giữ các dữ liệu động. Nếu điện áp bị mất, các module sẽ
quên những cài đặt và có thể không hoạt động đúng cho đến khi nó có thời
gian để học lại các dữ liệu được thiết lập.
Trong một số trường hợp, điều này đòi hỏi phải có một thủ tục học lại đặc
biệt bằng cách sử dụng một công cụ máy chẩn đoán với chức năng đặc biệt,
vì các module không thể tự học lại.
Một trong những tính năng của CAN và hệ thống mạng khác là module có
thể gửi và nhận tín hiệu để cho các module điều khiển chính biết được nó có
đang làm việc hay không. Đều này làm cho chẩn đoán trên xe trở nên dễ
dàng hơn, đồng thời nó cũng có nghĩa là một module có thể phá hủy toàn bộ
mạng gây ngắt hoạt động hoàn toàn của chiếc xe.
Khi vấn đề truyền dữ liệu bị lỗi nối tiếp xe xảy ra, nó sẽ thường thiết lập một
“U” mã lỗi chẩn đoán (DTC) và bật đèn chỉ thị sự cố (MIL). Tùy thuộc vào
các lỗi, chiếc xe có thể có hoặc có thể không hoạt động.
Ví dụ: Việc mất liên lạc giữa bộ điều khiển động cơ và bộ điều khiển truyền
dẫn có mã U1026 ( trên dòng GM ) gây cho xe có hiện tượng hoạt động
không ổn định.Tất cả các module trên một mạng lưới của xe cần ba điều để
hoạt động đúng: điện, mặt đất và kết nối dữ liệu nối tiếp.
Một số module có thể vẫn còn hoạt động trong một khoảng thời gian sau khi
hệ hống đánh lửa được tắt. Thì để giảm hao tổn nguồn khi xe tắt, một tín
hiệu ” ngủ” sẽ được gửi tới các module trên mạng lưới. Tuy nhiên một số
không bao giờ có thể đi vào giấc ngủ như module chống trộm, khóa,… để đảm bảo độ an toàn.
Tài liệu liên quan:
-

Bài thu hoạch cá nhân phòng Bosch và hộ số ly hợp kép | Nghành công nghệ kỹ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
334 167 -

Động cơ tỉ nén biến thiên | Tiểu luận môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
530 265 -

Báo cáo thực tập tốt nghiệp: Công ty Cổ Phần Ôtô Kim Thanh | Báo cáo môn Công nghệ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.2 K 576 -

Báo cáo thực tập hệ thống truyền động servo | Báo cáo môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
592 296 -
Hệ thống truyền lực trên ô tô (powertrain system) | Bài giảng môn Công nghễ kĩ thuật ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
890 445