Thiết Kế Chế Tạo Hệ Thống May Miệng Bao 25-50kg Hoàn Toàn Tự Động Hoá | Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
Nhận biết: hình dùng được đề tài được giao bởi giảng viên hướngdẫn và đọc hiểu tài liệu liên quan đến đồ án.- Thiết kế: Sử dụng phần mềm Autocad để xây dựng hệ thống các thiết bị điện, khí nén và có khí gồm hệ thống truyền động vit me với tay kẹp trên và tay kẹp dưới .Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Khóa luận tốt nghiệp (DHCNTPHCM) 53 tài liệu
Trường: Trường Đại học Công nghiệp Thành phố Hồ Chí Minh 671 tài liệu
Tác giả:



















Preview text:
lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền BỘ CÔNG THƯƠNG
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP. HỒ CHÍ MINH
KHOA CÔNG NGHỆ ĐIỆN ---- ---
KHOÁ LUẬN TỐT NGHIỆP
THIẾT KẾ CHẾ TẠO HỆ THỐNG MAY MIỆNG
BAO 25-50KG HOÀN TOÀN TỰ ĐỘNG HOÁ
SINH VIÊN: NGUYỄN VŨ TRUNG KIÊN 19504901 TRẦN MINH NHẬT 19494761
ĐẶNG NGỌC HƯNG 19434471
NGUYỄN ĐÌNH PHƯƠNG 19436571 LỚP: DHDKTD15A GVHD:
TS. NGÔ THANH QUYỀN
TP.HCM, ngày 19 tháng 05 năm 2023 lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP. HCM
KHOA CÔNG NGHỆ ĐIỆN
PHIẾU GIAO NHIỆM VỤ KHÓA LUẬN TỐT NGHIỆP
1. Họ và tên sinh viên/ nhóm sinh viên được giao đề tài (1): Nguyễn Vũ Trung Kiên MSSV: 19504901 (2): Nguyễn Đình Phương MSSV: 19436571 (3): Đặng Ngọc Hưng MSSV: 19434471 (4): Trần Minh Nhật MSSV: 19494761 2. Tên đề tài:
Thiết kế chế tạo hệ thống may miệng bao 25-50kg hoàn toàn tự động hoá . 3. Nhiệm vụ -
Nhận biết: hình dùng được đề tài được giao bởi giảng viên hướng dẫn
và đọc hiểu tài liệu liên quan đến đồ án. -
Thiết kế: Sử dụng phần mềm Autocad để xây dựng hệ thống các thiết bị
điện, khí nén và có khí gồm hệ thống truyền động vit me với tay kẹp trên và tay kẹp dưới. -
Lắp đặt lắp ráp cơ khí, điện. -
Lập trình điều khiển theo một số yêu cầu công nghệ cho Mô hình.
4. Kết quả dự kiến
Sinh viên ghi tóm tắt kết quả dự kiến sẽ đạt được -
Bản vẽ thiết kế phải chính xác với mô hình có khí - điện thực tế. -
Mô hình điện – cơ khí phải đạt yêu cầu về độ chính xác, thực hiện đúng
các chấp hành được lập trình, an toàn, bền chắc, thẩm mỹ. -
Khả năng ứng dụng mô hình vào việc học tập và nghiên cứu ứng dụng.
Tp. HCM, ngày tháng năm 2022 Sinh viên
Giảng viên hướng dẫn TS. Ngô Thanh Quyền Trưởng bộ môn lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền TS. Ngô Thanh Quyền
NHẬN XÉT CỦA GIẢNG VIÊN HƯỚNG DẪN
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- - lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- -
--------------------------------------------------------------------------------------------------- - MỤC LỤC
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TP. HCM...................................................
PHIẾU GIAO NHIỆM VỤ KHÓA LUẬN TỐT NGHIỆP......................................
NHẬN XÉT CỦA GIẢNG VIÊN HƯỚNG DẪN..................................................
MỤC LỤC............................................................................................................
DANH SÁCH HÌNH ẢNH....................................................................................
DANH SÁCH BẢNG..........................................................................................viii
CHƯƠNG 1: GIỚI THIỆU ĐỀ TÀI....................................................................... 1.1
Đặt vấn đề..........................................................................................1 1.2
Mục tiêu.............................................................................................4 1.3
Phạm vi nghiên cứu............................................................................4 1.4
Phương pháp tiếp cận.........................................................................4 lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
CHƯƠNG 2: TỔNG QUAN HỆ THỐNG............................................................. 2.1
Tổng quan hệ thống............................................................................5
2.1.1 Nguyên lí hoạt động.............................................................................. 2.1.2
Hình ảnh giới thiệu các module............................................................ 2.2
Động cơ Servo....................................................................................6
2.2.1 Giới thiệu sơ lược về động cơ Servo.....................................................
2.2.2 Hướng dẫn kết nối động cơ Servo......................................................... 2.3
Bộ điều khiển SERVO J4...................................................................9 2.4
Biến tần FR-A700............................................................................10 2.5
Xi lanh..............................................................................................11 2.6
Cảm biến từ cho xi lanh...................................................................12 2.7
Van khí nén......................................................................................13 2.8
Máy nén khí.....................................................................................14 2.9
Nguồn tổ ong....................................................................................14 2.10
Cầu dao............................................................................................15 2.11
Cầu chì.............................................................................................16 2.12
Contactor điện từ..............................................................................17 2.13
Domino............................................................................................18 2.14
Relay và module relay......................................................................18 2.15
Cơ sở lí thuyết PLC..........................................................................18
2.15.1 Tổng quan về PLC...............................................................................
2.15.2 Sơ lược về PLC MELSEC IQ-R Series.............................................
2.15.3 Đặc tính kĩ thuật................................................................................
2.15.4 Nguyên lí hoạt động của PLC........................................................... 2.16
Modul CC-LINK..............................................................................26 lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền 2.17
Terminal Block A6TBXY36............................................................27
CHƯƠNG 3: THI CÔNG MÔ HÌNH.................................................................... 3.1
Thi công phần cơ khí........................................................................28
3.1.1 Ý tưởng thiết kế..................................................................................
3.1.2 Thiết kế phần khung............................................................................
3.1.3 Thiết kế mô hình................................................................................. 3.2
Thi công phần cứng..........................................................................36
3.2.1 Cáp kết nối MR-J3BUS03M...............................................................
3.2.2 Cáp kết nối: Cổng Ethernet RJ45........................................................
3.2.3 Cáp Micro USB..................................................................................
3.2.4 Chọn thiết bị........................................................................................
3.2.5 Sơ đồ nguyên lí................................................................................... 3.3
Thi công phần mềm..........................................................................51
3.3.1 Các phần mềm được sử dụng..............................................................
3.3.2 Lưu đồ giải thuật điều khiển của hệ thống..........................................
3.3.3 Cấu hình cho PLC và Driver của Servo.............................................. 3.4
Chương trình điều khiển hệ thống....................................................63
3.4.1 Sơ đồ khối nguyên lí điều khiển Servo............................................... 3.4.2
Chương trình PLC và chương trình SFC điều khiển........................... 3.5
Thiết kế giao diện HMI....................................................................78
3.5.1 Cấu hình cho HMI..............................................................................
3.5.2 Giao diện HMI của hệ thống...............................................................
CHƯƠNG 4: KẾT QUẢ - NHẬN XÉT – ĐÁNH GIÁ........................................ 4.1
Mô hình hoàn chỉnh.........................................................................85 lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền 4.2
Kết quả thực nghiệm........................................................................85 4.3
Kết quả đạt được..............................................................................85
CHƯƠNG 5: KẾT LUẬN – HƯỚNG PHÁT TRIỂN.......................................... 5.1
Kết luận............................................................................................86 5.2
Hướng phát triển..............................................................................86 TÀI LIÊU THAM
KHẢO...........................................̣
..........................................
LỜI CẢM ƠN......................................................................................................... DANH SÁCH HÌNH ẢNH
Hình 1. 1: Hình ảnh công nhân đang đóng bao tại công ty TNHH Nhất A.........2
Hình 1. 2: Sản phẩm đóng bao tự động của công ty TNHH Thuận Nhật............3
Hình 2. 1: Sơ đồ khối các module của hệ thống máy đóng bao tự động..............5
Hình 2. 2: Các module chính của hệ thống máy đóng bao tự động.....................6
Hình 2. 3: Động cơ Servo HG-KR series............................................................7
Hình 2. 4: Động cơ servo là HG-KR 023............................................................8
Hình 2. 5: Cách kết nối động cơ Servo với bộ điều khiển...................................8
Hình 2. 6: Bộ điều khiển Servo J4......................................................................9
Hình 2. 7: Biến tần FR-A700 được lắp đặt trong hệ thống máy đóng bao........10
Hình 2. 8: Xi lanh được lắp đặt trong hệ thống máy đóng bao..........................11
Hình 2. 9: Cảm biến từ CS1-F...........................................................................12
Hình 2. 10: Van điện từ mà nhóm sử dụng cho hệ thống may miệng bao ........13
Hình 2. 11: Nguồn tổ ong mà nhóm sử dụng cho hệ thống may miệng bao......14
Hình 2. 12: Hình ảnh cho CB LS BKN 400V...................................................15
Hình 2. 13: Hình ảnh cầu chì 3NW7111 Siemens.............................................16
Hình 2. 14: Contactor mà nhóm sử dụng cho hệ thống may miệng bao............17
Hình 2. 15: PLC MELSEC iQ-R Series và MELSEC Q Series........................18
Hình 2. 16: Hình ảnh PLC MELSEC iQ-R series.............................................19
Hình 2. 17: Kiến trúc linh hoạt của PLC MELSEC iQ-R..................................20 lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
Hình 2. 18: Hệ thống kiểm soát an toàn của PLC MELSEC iQ-R....................21
Hình 2. 19: Hệ thống điều khiển dự phòng của PLC MELSEC iQ-R...............21
Hình 2. 20: Tính đồng bộ hoá chính xác cao của PLC MELSEC iQ-R.............22
Hình 2. 21: Các Module CPU được gắn vào Base............................................23
Hình 2. 22: Tổng thể của PLC MELSEC iQ-R.................................................24
Hình 2. 23: Chu kì quét của PLC......................................................................25
Hình 2. 24: Cấu trúc vùng nhớ của PLC...........................................................25
Hình 2. 25: Trạm PLC Mitsubishi điều khiển hệ thống may miệng bao ..........26
Hình 2. 26: Module CC-Link được lắp đặt trong hệ thống may miệng bao......26
Hình 2. 27: Terminal Block A6TBXY36 được lắp đặt trong hệ thống..............27
Hình 3. 1: Khung của hệ thống may miệng bao (Trạm 4).................................29
Hình 3. 2: Bản vẽ cơ khí của hệ thống may miệng bao (Trạm 4)......................30
Hình 3. 3: Bản vẽ cơ khí của tay kẹp dưới........................................................32
Hình 3. 4: Bản vẽ cơ khí của tay kẹp trên.........................................................34
Hình 3. 5: Mô hình tay kẹp dưới ở dạng 3D......................................................34
Hình 3. 6: Mô hình tay kẹp trên ở dạng 3D.......................................................35
Hình 3. 7: Mô hình hệ thống may miệng bao (Trạm 4) ở dạng 3D...................35
Hình 3. 8: Hình ảnh về Ethernet Hub TL-SG1024D.........................................36
Hình 3. 9: Hình ảnh về cáp kết nối MR-J3BUS03M.........................................37
Hình 3. 10: Dây cáp RJ45.................................................................................37
Hình 3. 11: Hình ảnh về cáp Micro USB..........................................................37
Hình 3. 12: Biểu tượng phần mềm Autoccad Mechanical.................................51
Hình 3. 13: Giao diện phần mềm Autoccad Mechanical...................................51
Hình 3. 14: Phần mềm lập trình GX Works3....................................................52
Hình 3. 15: Phần mềm lập trình MT Developer2..............................................53
Hình 3. 16: Phần mềm lập trình MT Configurator2..........................................54
Hình 3. 17: Phần mềm thiết kế giao diện HMI GT Design3 Mitsubishi............55
Hình 3. 18: Giao diện của phần mềm GT Design3 Mitsubishi..........................55
Hình 3. 19: Lưu đồ giải thuật trạng 4 – may miệng bao....................................56
Hình 3. 20: Giao diện phần mềm GX Work3....................................................57 DANH SÁCH BẢNG lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền CHƯƠNG 1:
GIỚI THIỆU ĐỀ TÀI 1.1 Đặt vấn đề
Tự động hoá trong công nghiệp trở thành xu hướng toàn cầu trong công nghiệp,
Với tốc độ phát triển hiện nay, tự động hoá ngày càng được đưa vào ứng dụng rộng rãi
trong lĩnh vực sản xuất công nghiệp như các dây chuyền sản xuất và các hệ thống hoàn
toàn tự động. Và đóng gói là một trong những bước quan trọng hàng đầu trong sản xuất.
Khâu đóng bao là giao đoạn cuối trong quá trình, tạo nên sự chắc chắn, nó quyết định
hình thức, sự chắc chắn, an toàn và tính thẩm mỹ của một sản phẩm và thể hiện tính
đồng bộ của một chuỗi quá trình sản xuất trước khi đưa ra thị trường tiêu thụ. Ngày nay,
người tiêu dùng luôn bị thu hút bởi hình thức bên ngoài của sản phẩm, Do đó vẻ ngoài
và sự hoàn thiện của sản phẩm luôn được các doanh nghiệp sản xuất cải thiện, điều đó
phụ thuộc rất nhiều vào giai đoạn đóng bao. Một trong những giải pháp giúp đảm bảo
tính đồng bộ, chắc chắn và an toàn của khâu đóng bao là sử dụng các máy đóng bao
hoàn toàn tự động hoá.
Tại Việt Nam, máy đóng bao tự động có thể được ứng dụng trong rất nhiều lĩnh
vực như sản xuất cám, gạo, phân bón. Chỉ tính riêng hai ngành sản xuất lúa gạo và phân
bón, theo số liệu thống kê của Bộ Nông nghiệp và Phát triển nông thôn, tổng sản lượng
lúa năm 2022 đạt 42.66 triệu tấn [1]. Ngoài ra với nhu cầu phân bón nội địa năm 2022
ước tính đạt 8.6 triệu tấn, nhu cầu tiêu thụ phân bón năm 2023 dự kiến lên mức 9.1 triệu
tấn [2] thì nhu cầu sử dụng máy đóng bao tự động là vô cùng lớn.Tuy nhiên, hiện nay
nhiều nhà máy xí nghiệp nhất là các cơ sở sản xuất nhỏ lẻ chưa trang bị hệ thống đóng
bao tự động, khâu đóng bao vẫn chủ yếu được thực hiện thủ công dẫn đến giảm sản
lượng thành phẩm, năng suất lao động và ảnh hưởng trực tiếp đến sức khỏe người lao
động vận hành khâu đóng bao. 1
Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
Hình 1. 1: Hình ảnh công nhân đang đóng bao tại Công ty TNHH Nhất A (Bắc Tân Uyên, Bình Dương)
Đối với Nhà máy cám Nhất A hiện nay đang vận hành 4 dây chuyền sản xuất,
số lượng công nhân thực hiện công đoạn đóng bao khoảng 3 công nhân/1 dây chuyền,
trong đó khâu may miệng bao là 1 công nhân/1 dây chuyền. Như vậy, tổng số lượng
công nhân cần thiết để vận hành công đoạn này cho 2 ca sản xuất lên đến 24 người. Nếu
được trang bị hệ thống đóng và may bao tự động, rõ ràng có thể tiết kiệm được nhân lực
thực hiện các khâu trên giúp tăng năng suất lao động, chất lượng sản phẩm và giảm giá
thành sản phẩm. Ngoài ra, sử dụng hệ thống đóng và may bao tự động trong nhà máy
còn góp phần bảo vệ sức khỏe, an toàn lao động cho công nhân tránh tiếp xúc trực tiếp
với phân bón thường xuyên.
Một hệ thống máy đóng bao tự động đầy đủ thường có các bộ phận thực hiện các
chức năng như cấp bao, định vị, tách bao và mở miệng bao, cấp liệu, di chuyển bao đến
vị trí may bao, gập miệng và may bao. Trên thị trường, một máy đóng bao tự động có
đầy đủ các chức năng trên được nhập khẩu với giá khoảng 2,000,000,000 VNĐ đến
4,000,000,000 VNĐ [3] ( chẳng hạn như sản phẩm của công ty Tianjin Newidea
Machinery Co., Ltd., Trung Quốc). Ưu điểm của các hệ thống nhập khẩu là vận hành
ổn định nhưng sử dụng các máy móc nhập khẩu, dây chuyền sản xuất hiện tại của nhà
máy thường phải điều chỉnh, sắp xếp lại để phù hợp với yêu cầu vận hành của máy dẫn
đến những xáo trộn nhất định trong quá trình sản xuất hiện tại. Ngoài ra, chi phí bảo 2 Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
hành sửa chữa liên quan đến máy móc khi có sự cố thường cao do phải chờ đợi chuyên
gia từ nước ngoài kiểm tra sữa chữa, hoặc thời gian vận chuyển thiết bị thay thế.
Trước thực tế đó, một số sản phẩm máy đóng bao đã được một số doanh nghiệp
trong nước nghiên cứu chế tạo để đáp ứng nhu cầu sản xuất trong nước như Công Ty
TNHH Điện Tự Động Thuận Nhật, Hoàng Trường [4]. Chi phí cho một máy đóng bao
tự động của các doanh nghiệp trong nước giao động trong khoảng 800,000,000 đến 1 ,000,000,000 VNĐ.
Hình 1. 2 Sản phẩm đóng bao tự động của công ty TNHH Điện Tự Động Thuận Nhật
Việc sử dụng máy nội địa trong quá trình sản xuất đã góp phần hạn chế được các
khó khăn gặp phải khi trang bị các loại máy móc nhập khẩu liên quan đến giá thành và
sửa chữa bảo hành. Tuy đã áp dụng hệ thống đóng bao vào quá trình sản xuất nhưng
hiệu suất chưa được tối ưu ở khâu may bao. Những hạn chế này sẽ được khắc phục triệt
để nếu như quá trình công nghệ, máy móc được phát triển bởi chính nội lực của công ty.
Trước thực tế đó, nhóm nghiên cứu đề đề tài “THIẾT KẾ CHẾ TẠO HỆ THỐNG
MAY MIỆNG BAO 25-50KG HOÀN TOÀN TỰ ĐỘNG HOÁ” là mô hình
mô phỏng một khâu đóng bao, hoàn thiện sản phẩm. Đó là cơ sở thực tế để các nhà đầu
tư phát triển hệ thống riêng cho mình trong sản xuất sản phẩm. Đồng thời nhìn nhận để
đưa ra các đề xuất, biện pháp hợp lý để cải thiện một hệ thống sản xuất trong thực tế.
Và mô hình này cũng tạo điều kiện học tập cho các học sinh, sinh viên, khoa, viện và 3
Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
nhà trường có điều kiện để học tập, nghiên cứu và phát triển, phục vụ trong công tác
giảng dạy dựa trên mô hình đã có sẵn. 1.2 Mục tiêu
1.2.1. Mục tiêu tổng quát:
Nghiên cứu, thiết kế lắp đặt, phân tích và lập trình hệ thống may miệng bao hoàn toàn
tự động hoá của một mô hình đóng bao tự động (các loại bao có kích thước từ 2550kg)
một cách tối ưu và hiệu quả, từ đó áp dụng mô hình thực tiễn vào trong sản xuất.
1.2.2. Mục tiêu cụ thể:
• Nghiên cứu về mô hình máy đóng bao tự động.
• Thiết kế bản vẽ cơ khí, điện, khí nén của mô hình tự động.
• Lắp đặt cơ khí, điện, khí nén mô hình thực tế của máy đóng bao tự động.
• Lập trình vận hành mô hình máy đóng bao tự động.
• Đề xuất hướng phát triển cho mô hình máy đóng bao tự động. 1.3
Phạm vi nghiên cứu
Thiết kế chế tạo hệ thống may miệng bao hoàn toàn tự động hoá của một mô hình
máy đóng bao tự động phục vụ sản xuất tại nhà máy cám của công ty TNHH Nhất A. 1.4
Phương pháp tiếp cận
• Thu thập thông tin về quy trình công nghệ máy đóng bao.
• Khảo sát thực tế một số loại máy đóng bao đang được bán trên thị trường và
đang được sử dụng tại một số nhà máy.
• Thu thập về số lượng các doanh nghiệp cần sử dụng máy đóng bao hiện nay.
• Phân tích đánh giá hiện trạng sản xuất (khâu may bao) tại nhà máy cám của
công ty TNHH Nhất A nhằm xây dựng quy trình công nghệ phù hợp.
• Thực hiện nghiên cứu các thiết bị cần có trong hệ thống may miệng bao hoàng
toàn tự động hoá của máy đóng bao tự động.
• Thực nghiệm chế tạo hệ thống may miệng bao hoàn toàn tự động hoá nhằm
hiện thực hoá sản phẩm. 4 Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền CHƯƠNG 2:
TỔNG QUAN HỆ THỐNG
2.1 Tổng quan hệ thống 2.1.1
Nguyên lí hoạt động
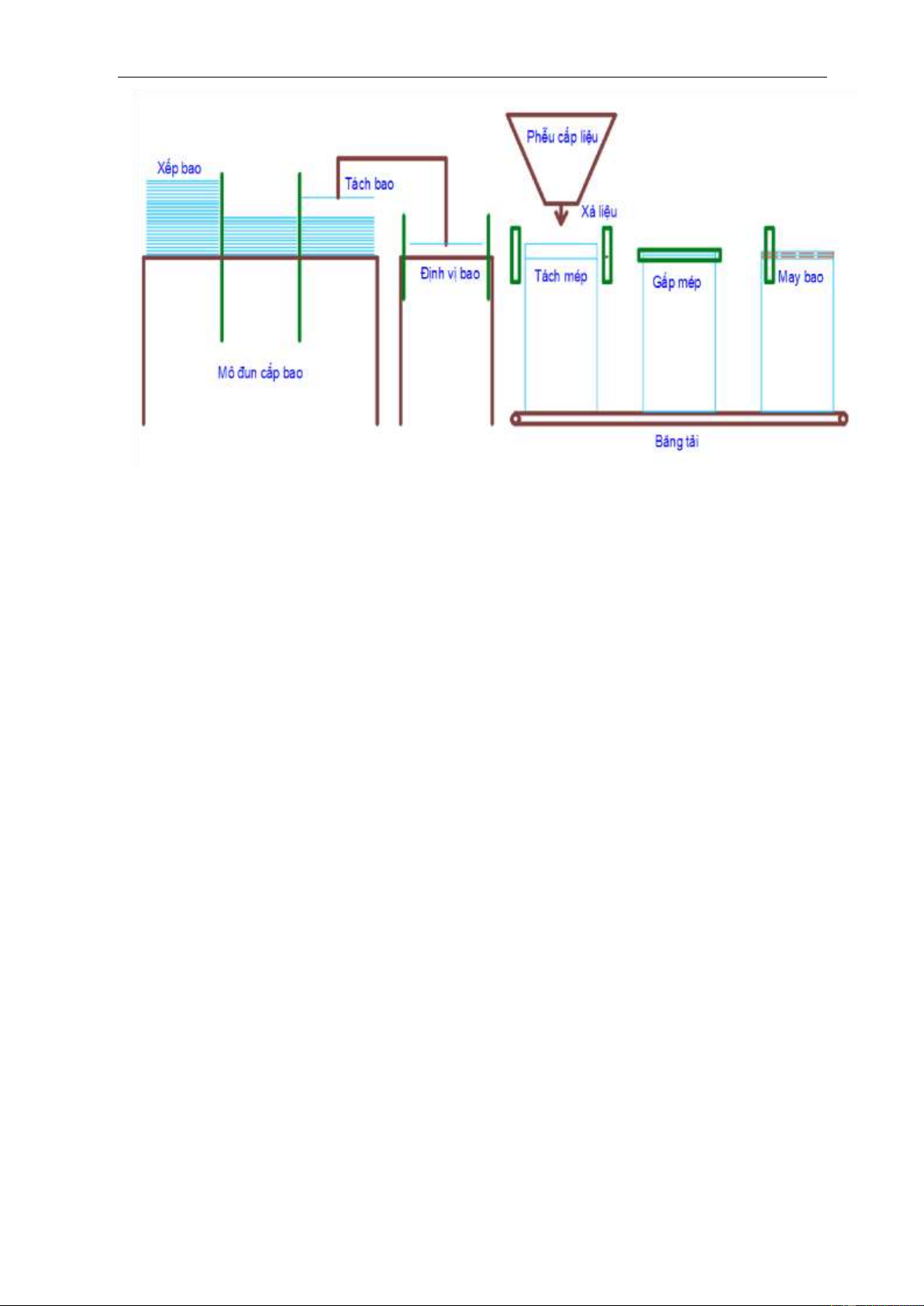
Nhìn chung, một máy đóng bao tự động gồm có các chức năng như cấp bao, tách
bao, định vị và mở miệng bao, đưa bao vào phễu và xả nguyên liệu, di chuyển bao đến
bộ phận may bao, gấp mép và may bao.
Hình 2. 1 Sơ đồ khối các module của hệ thống máy đóng bao tự động
Trong đó, chức năng của các bộ phận như sau:
• Module cấp bao: Có nhiệm vụ đưa bao được xếp sẵn đến module tách bao.
• Module tách bao: Định vị đúng kích thước của bao, vị trí mở miệng bao và đưa
bao đến miệng phễu chiết rót nguyên liệu.
• Module cấp nguyên liệu: Thực hiện mở, giữ miệng bao và chiết rót nguyên liệu
theo đúng trọng lượng đã quy định vào bao.
• Module di chuyển bao: Di chuyển các bao đã có nguyên liệu ra khỏi khu vực chiết rót. 5
Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
• Module gập và may miệng bao: Gập miệng bao và thực hiện may bao để hoàn
tất quy trình hoạt động của máy.
Nguyên lý hoạt động của trạm 4 – hệ thống may miệng bao:
Khi trạm 3 xuất tín hiệu đã hoàn thành công việc cho nguyên liệu vào bao, tay
kẹp trên và tay kẹp dưới đồng thời di chuyển đến vị trí xả nguyên liệu để nhận bao, khi
đến đúng vị trí nhận bao đồng thời 2 xi lanh trên dưới sẽ kích hoạt đi vào kẹp miệng bao
và thân bao, khi cảm biến đã kẹp hoàn chỉnh xuất tính hiệu thì cả 2 tay kẹp đồng thời di
chuyển về vị trí may bao, khi đến hết vị trí băng tải con lăn tay kẹp dưới sẽ mở và đồng
thời dừng tại vị trí mặt định, tay kẹp trên tiếp tục kẹp bao và di chuyển kéo bao đồng
thời cùng với băng tải qua tay kẹp máy may, đến tay kẹp máy may tay kẹp trên mở ra
đồng thời dừng tại vị trí mặt định sau đó tay kẹp máy may nhận bao gập bao và tiến
hành may, hoàn thành một chu trình. Lặp lại chu trình tiếp theo. 2.1.2
Hình ảnh giới thiệu các module
Hình 2. 2: Các module chính của hệ thống máy đóng bao tự động 2.2 Động cơ Servo 2.2.1
Giới thiệu sơ lược về động cơ Servo
Động cơ Servo được hình thành bởi những hệ thống hồi tiếp vòng kín và bao
gồm một số bộ phận cụ thể là mạch điều khiển, động cơ Servo, trục, chiết áp, bánh răng
truyền động, bộ khuếch đại và bộ mã hóa (encoder) hoặc bộ phân giải. Động cơ Servo
là một thiết bị điện độc lập, được sử dụng để quay các bộ phận của máy với hiệu suất
cao và độ chính xác cao. Encoder đóng vai trò phản hồi về tốc độ và vị trí của Servo
trong quá trình hoạt động.
Động cơ được điều khiển bằng tín hiệu điện, Analog hoặc Digital, xác định
chuyển động theo vị trí lệch cuối cùng của trục. 6 Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
Hình 2. 3 Động cơ servo HG-KR series.
Ưu nhược điểm của động cơ servo AC HG-KR
Ưu điểm: Điều khiển tốc độ tốt, điều khiển trơn tru trên toàn bộ vùng tốc độ, hầu
như không dao động, hiệu suất cao hơn 90%, ít nhiệt, điều khiển tốc độ và vị trí chính
xác cao (tùy thuộc vào độ chính xác của bộ mã hóa). Mô-men xoắn có quán tính thấp,
tiếng ồn thấp, bảo trì miễn phí (đối với môi trường không có bụi, nổ).
Nhược điểm: Điều khiển phức tạp hơn, các thông số ổ đĩa cần phải điều chỉnh
các thông số PID để xác định nhu cầu kết nối nhiều hơn…
Thông số kĩ thuật • Tốc độ: 3000 r/min
• Tốc độ MAX: 6000 r/min
• Độ phân giải Encoder: 22Bit (4,194,304 xung/vòng) • Phanh: Có / Không
• Sử dụng: Kết hợp với các bộ điều khiển động cơ Servo dòng MR-J3
• Phần mềm cấu hình: MR Configurator 2 và MT Developer2
Trong hệ thống này thì nhóm đã sử dụng một loại động cơ Servo chính là HGKR23. 7
Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
Hình 2. 4 Động cơ servo là HG-KR 023 2.2.2
Hướng dẫn kết nối động cơ Servo
• Đọc kỹ sách hướng dẫn sử dụng về động cơ Servo trước khi kết nối và sử dụng động cơ.
Hình 2. : Cách kết nối động cơ Servo với bộ điều khiển
• Kết nối trực tiếp đầu ra của bộ điều khiển Servo (U, V, W) đến đầu vào động cơ Servo (U, V, W).
• Đảm bảo dây cáp kết nối vẫn còn tốt, an toàn, không bị đứt. Lưu ý: 8 Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
Không nối trực tiếp nguồn xoay chiều vào động cơ Servo và không nối trực tiếp
từ contactor điện từ vào động cơ Servo (nếu không, hư hỏng thiết bị có thể xảy ra).
Khi dây cáp không được gắn đủ chặt vào hộp đấu dây, dây cáp và hộp đấu dây
có thể phát nóng vì tiếp xúc không được tốt. Hãy chắc chắn rằng cáp được vặn chặt với một mô men quy định.
2.3 Bộ điều khiển SERVO J4
Phương pháp điều chỉnh tốc độ và vị trí động cơ được sử dụng nhiều nhất trên
thị trường hiện nay là sử dụng bộ điều khiển cho servo. Trong hệ thống may miệng bao
sử dụng bộ điều khiển servo J4.
Hình 2. 6: Bộ điều khiển servo J4
Thông số kĩ thuật • Mã hiệu: MR-J4-W3-222B
• Bộ điều khiển động cơ Servo Mitsubishi: 3 trục
• Điện áp hoạt động: 1 pha 220VAC 9
Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com) lOMoAR cPSD| 32573545
Khóa luận tốt nghiệp GVHD: TS. Ngô Thanh Quyền
• Công suất (mỗi trục): 0.2KW
• Điện áp định mức đầu ra: 3P 170VAC
• Dòng định mức (mỗi trục): 1.5A
• Hãng sản xuất: Mitshubishi.
2.4 Biến tần FR-A700
Biến tần là thiết bị dùng để thay đổi và điều chỉnh tốc độ động cơ xoay chiều.
Trong hệ thống may miệng bao sử dụng biến tần FR (FREQROL)-A700 của Mitsubishi.
Hình 2. 7: Biến tần FR-A700 được lắp đặt trong hệ thống may miệng bao
Biến tần FR-A700 có khả năng điều khiển vận tốc vô cùng chính xác khi vận
hành với một encoder. Đặc biệt, khi vận hành thiết bị thường có sai số rất nhỏ (0.01%).
Có hiệu suất hoạt động cao nhờ khả năng điều khiển mạnh mẽ.
Có độ bền cao, khả năng kết nối đa dạng. Trong quá trình sử dụng sản phẩm hoạt
động rất ổn định, hạn chế tối đa tình trạng xảy ra sự cố.
Giao diện dễ sử dụng. Các thông số được cài đặt trực tiếp thông qua bảng điều
khiển nên người dùng sẽ không gặp nhiều khó khăn trong quá trình sử dụng. Thông số kĩ thuật • Loại: 3 pha 10 Downloaded by Lan Anh Tr?n (tlananh9988@gmail.com)
Tài liệu liên quan:
-

Chương 2: Phân tích thực trạng kinh doanh thẻ tín dụng tại Ngân hàng Ngoại thương Việt Nam - CN Gia Định | Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
27 14 -

Sự ảnh hưởng của video quảng cáo dạng Ngắn đến hành vi mua của người tiêu Dùng tại thành phố Hồ Chí Minh| Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
33 17 -

Tổng Hợp Dữ Liệu Khảo Sát Thực Địa Du Lịch Đêm Quận 1: Tháng 2| Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
26 13 -

Các yếu tố ảnh hưởng đến quyết định thuê chỗ ở của sinh viên cáctrường trong khu đô thị Đại học Quốc gia Thành phố Hồ Chí Minh | Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
27 14 -

Đổi mới mô hình kinh doanh: Hướng tới một quy trình | Khóa luận tốt nghiệp | Trường Đại học Công Nghiệp Thành phố Hồ Chí Minh
29 15