Bài nghiên cứu động vật học và không gian làm việc của robot
Cánh tay robot là một thiết bị thông minh, có khả năng vận hành tự ộng dựa trên phần mềm ược lập trình sẵn. Cánh tay robot công nghiệp là hệ máy mô phỏng hoạt ộng của một cánh tay của con người ể phục vụ trong nhiều công oạn của dây chuyền sản xuất. Cánh tay robot ược sử dụng trong nhiều ngành công nghiệp khác nhau như sản xuất. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem !
Môn: Quản trị xuất nhập khẩu (UEH) 12 tài liệu
Trường: Đại học Kinh tế Thành phố Hồ Chí Minh 3 K tài liệu
Tác giả:



Preview text:
lOMoAR cPSD| 49519085
NGHIÊN CỨU ĐỘNG HỌC VÀ KHÔNG GIAN LÀM VIỆC CỦA
ROBOT NÂNG HẠ PALLET
Đinh Đại Đăng Khoa, Nguyễn Huy Phúc*
*Viện Kỹ Thuật HUTECH, Trường Đại học Công Nghệ TP. Hồ Chí Minh (HUTECH) TÓM TẮT
Bài toán ộng học là vấn ề cơ bản trong việc iều khiển các cơ cấu robot. Chủ ề này nhận luôn
ược sự quan tâm từ nhiều nhà nghiên cứu. Trong các nhà xưởng, cánh tay robot nối tiếp
dùng cơ cấu hình thang ược ứng dụng phổ biến ể di chuyển các pallet hàng hóa. Và trong ề
tài này, chúng tôi nghiên cứu về mô hình ộng học của cánh tay robot nâng hạ pallet có cơ
cấu hình thang. Sau ó khảo sát không gian làm việc.
Từ khóa: cánh tay robot, iều hướng, dẫn ường, pallet, ộng học.
1. GIỚI THIỆU
Cánh tay robot là một thiết bị thông minh, có khả năng vận hành tự ộng dựa trên phần mềm ược lập
trình sẵn. Cánh tay robot công nghiệp là hệ máy mô phỏng hoạt ộng của một cánh tay của con người ể
phục vụ trong nhiều công oạn của dây chuyền sản xuất. Cánh tay robot ược sử dụng trong nhiều ngành
công nghiệp khác nhau như sản xuất ô tô, iện tử, thực phẩm và ồ uống, y tế và nhiều ngành công nghiệp
khác. Cánh tay robot có thể thực hiện các thao tác với sản phẩm với ộ chính xác cao hơn và nhanh hơn so với con người.
Các vấn ề nghiên cứu cơ bản trong lĩnh vực cánh tay robot có thể kể ến như: iều khiển và lập trình
cánh tay robot, thiết kế và chế tạo các khớp nối và cơ cấu của cánh tay robot, nghiên cứu vật liệu và
công nghệ sản xuất các bộ phận của cánh tay robot,…
Có nhiều nghiên cứu trong và ngoài nước liên quan robot nâng hạ pallet. Liangan Zhang phân tích
về sa bàn di chuyển và lên lịch trình cho các robot nâng hạ pallet trong nhà xưởng [1]. R. Li sử dụng
hệ thống camera hỗ trợ xác ịnh vị trí cho robot [2]. Z. Wang nghiên cứu cơ cấu robot nâng hạ pallet
dùng cơ cấu bốn khâu bản lề [3]. Z. Zhuo trình bày về giải pháp tối ưu ường i cho robot [4]. D. Binglei
phân tích các thông số cơ bản và ảnh hưởng ến robot nâng hạ pallet [5].
Robot nâng hạ pallet dạng cơ cấu hình thang có nhiều phương pháp giải ộng học khác nhau.
Trong nghiên cứu này, chúng tôi dùng phương pháp D-H ể giải bài toán.
Bài tham luận ược chia làm 4 phần. Phần 1 ưa ra giới thiệu về cánh tay robot và ặt vấn ề. Phần 2 ưa
ra mô hình ộng học. Phần 3 trình bày khảo sát không gian làm việc. Cuối cùng là phần kết luận và hướng phát triển. 2. ĐỘNG HỌC
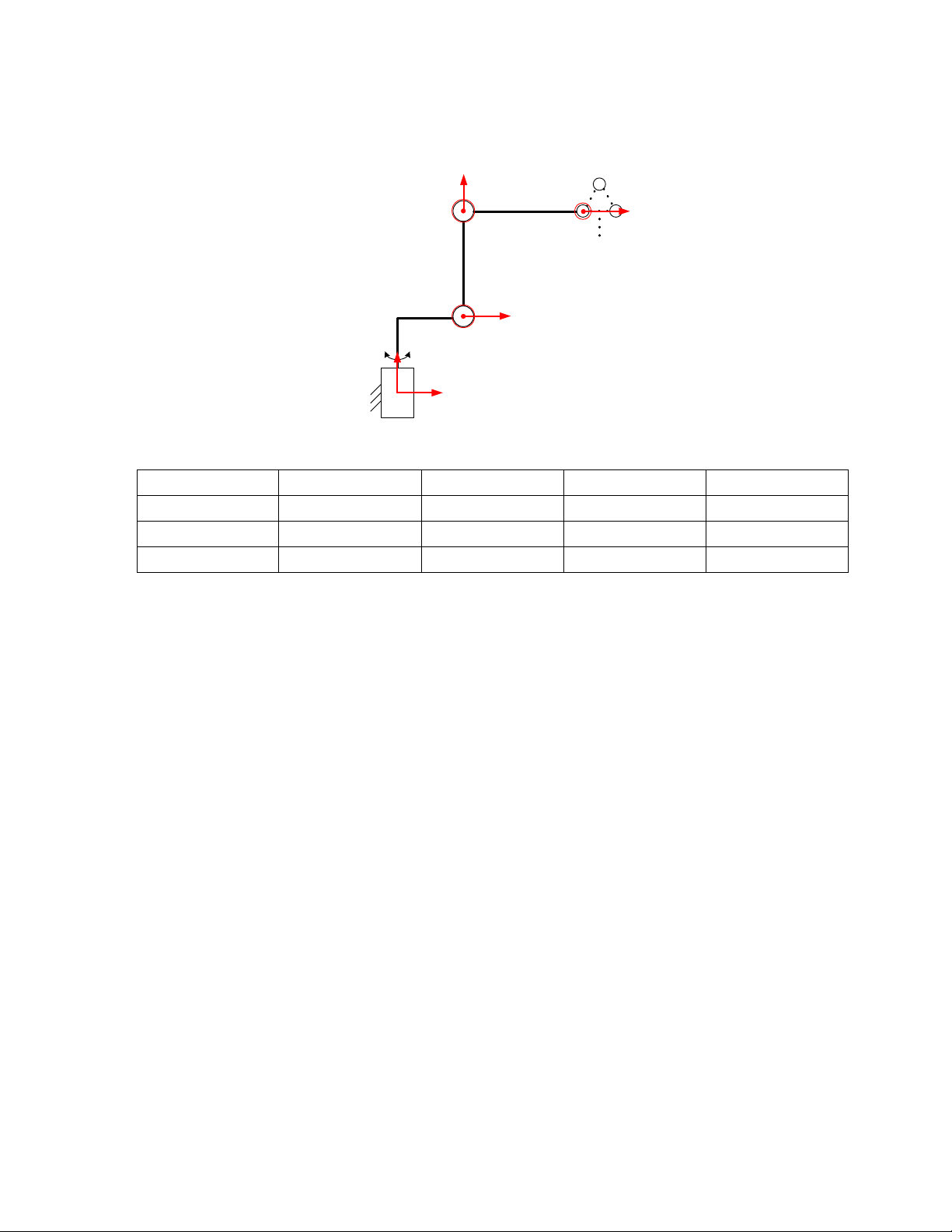
Sử dụng phương pháp D-H cho bài toán ộng học. Đặt hệ tọa ộ: lOMoAR cPSD| 49519085 1 X 2 Z 2 l 4 Z 3 X 3 E l 3 Z 1 l 2 X 1 Z 0 l 1 X 0
Hình 1: Sơ ồ nguyên lý Bảng thông số D-H: 𝑖 𝑎𝑖 𝛼𝑖 𝑑𝑖 𝜃𝑖 1 𝑙2 900 𝑙1 𝜃1 2 𝑙3 0 0 𝜃2 3 𝑙4 0 0 𝜃3
Các ma trận 𝑇 thành phần: 𝑐1 0 𝑠1 𝑙2𝑐1 0𝑇 = [𝑠1 0 −𝑐1 𝑙2𝑠1] 1 𝑙 0 1 0 1 1 0 0 0 𝑐2 −𝑠2 0 𝑙3𝑐2 1𝑇 = [𝑠2 𝑐2 0 𝑙3𝑠2] 2 0 0 0 1 1 0 0 0 𝑐3 −𝑠3 0 𝑙4𝑐3 2𝑇 = [𝑠3 𝑐3 0 𝑙4𝑠3] 3 0 0 0 1 1 0 0 0 3𝑇 = 𝑐𝑜𝑛𝑠𝑡 𝐸
Ma trận biến ổi từ hệ tọa ộ {3} ến hệ tọa ộ {0}: 𝑐23𝑐1 −𝑠23𝑐1
𝑠1 𝑐1(𝑙2 + 𝑙4𝑐23 + 𝑙3𝑐2)
𝑠1(𝑙2 + 𝑙4𝑐23 + 𝑙3𝑐2)]
03𝑇 = 01𝑇12𝑇23𝑇 = [𝑐23𝑠1 −𝑠23𝑠1 𝑐1 𝑠23 𝑐23 0
𝑙1 + 𝑙4𝑠23 + 𝑙3𝑠2 0 0 0 1 lOMoAR cPSD| 49519085
Tọa ộ bộ phận công tác:
𝑃𝐸 = 03𝑇 3𝑃𝐸 Cơ cấu hình thang: 2 θ 3 φ 3 φ 2
Hình 2: Cơ cấu hình thang
Các góc ộng cơ: 𝜑1, 𝜑2,𝜑3 𝜑1 = 𝜃1 { 𝜑2 = 𝜃2 𝜑3 = 𝜑2 + 180 − 𝜃3 3. KHÔNG GIAN LÀM VIỆC
Dùng phần mềm Geogebra ể khảo sát chuyển ộng của cơ cấu:
Hình 3: Mô phỏng trên geogebra
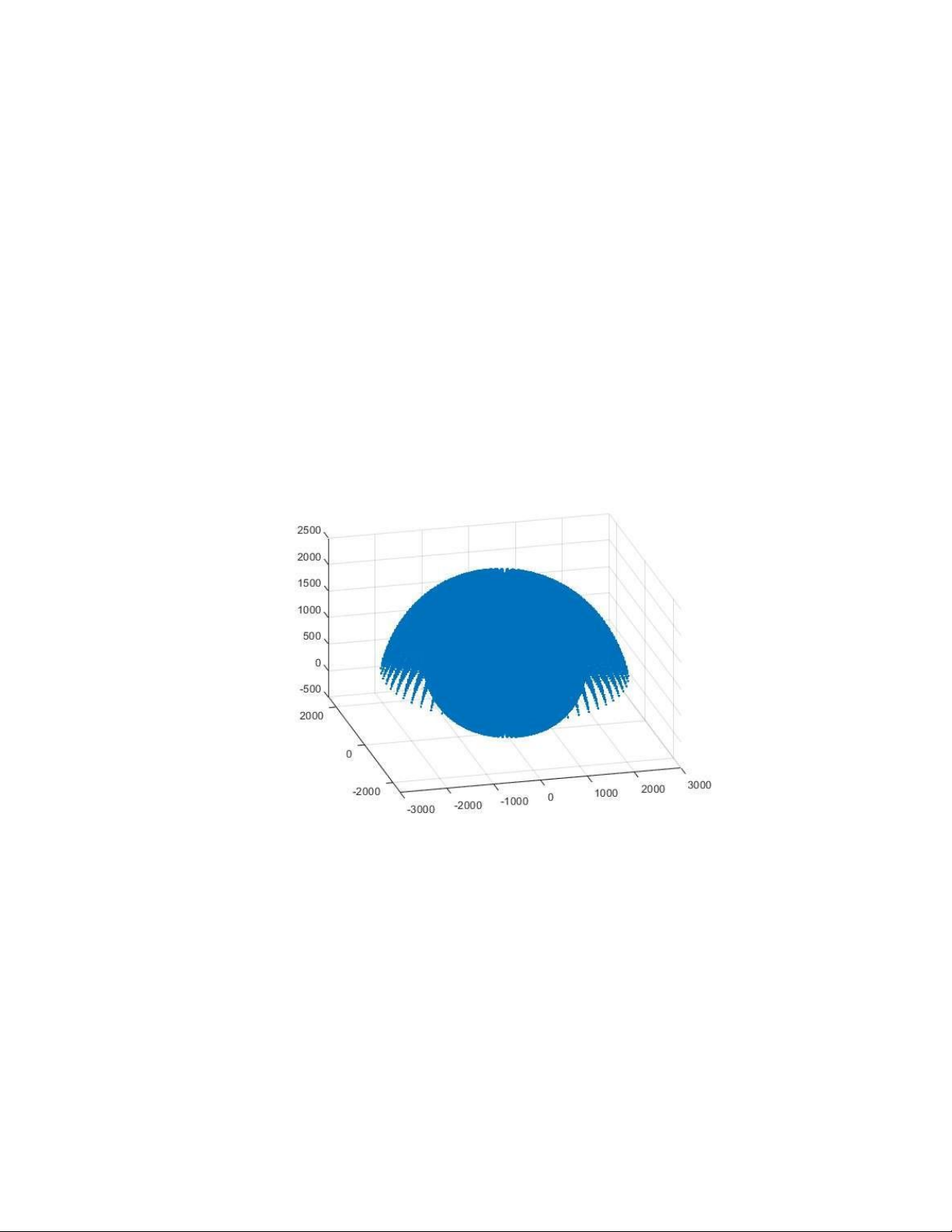
Khảo sát không gian làm việc với các tham số giả sử: 𝑙1 = 0, 𝑙2 = 280, 𝑙3 = 1150, 𝑙4 = 1220, 3𝑃𝐸 =
[0 0 0]𝑇, 𝜃1 = [−180,180] , 𝜃2 = [5,130], 𝜃3 = [20,160]
𝑥 = 𝑐1(𝑙2 + 𝑙4𝑐23 + 𝑙3𝑐2) lOMoAR cPSD| 49519085
{𝑦 = 𝑠1(𝑙2 + 𝑙4𝑐23 + 𝑙3𝑐2)
𝑧 = 𝑙1 + 𝑙4𝑠23 + 𝑙3𝑠2 3
Hình 4: Không gian làm việc 4. KẾT LUẬN
Bài tham luận ã mô hình ộng học cho robot nâng hạ pallet dùng cơ cấu hình thang. Bên cạnh ó, tiến
hành khảo sát không gian làm việc. Kiểm chứng giải thuật với một vài iểm ặc biệt cho thấy phương trình ộng học là úng.
Trong thời gian tới, mô hình ộng học ngược sẽ ược nghiên cứu. Bên cạnh ó, tiến hành chế tạo mô
hình thực nghiệm ể ánh giá khả năng áp dụng thực tế của giải thuật.
TÀI LIỆU THAM KHẢO 1.
Liangan Zhang et al., "Layout analysis and path planning of a robot palletizing production
line," 2008 IEEE International Conference on Automation and Logistics, Qingdao, 2008, pp. 2420-2425. lOMoAR cPSD| 49519085 2.
R. Li, S. Fan, J. Hou, Q. Hou and X. Chen, "In-container Robot Palletizing with 3D vision-
based Datum Point Positioning," 2021 China Automation Congress (CAC), Beijing, China, 2021, pp. 945-950. 3.
Z. Wang and L. -y. Ran, "Research on Arm of an Improved Palletizing Robot with Parallel
Four-bar Linkage," 2020 5th International Conference on Mechanical, Control and Computer
Engineering (ICMCCE), Harbin, China, 2020, pp. 326-329. 4.
Z. Zhuo and Z. Cheng, "Research on Trajectory Smoothness Optimization and Dynamics
Simulation of Palletizing Robot," 2022 IEEE 6th Advanced Information Technology, Electronic and
Automation Control Conference (IAEAC ), Beijing, China, 2022, pp. 1545-1549. 5.
D. Binglei, S. Liangping and L. Jinquan, "Analysis on the Influence of Structure
Parameters on Workspace of a Novel Palletizing Robot," 2011 Second International Conference on
Digital Manufacturing & Automation, Zhangjiajie, China, 2011, pp. 199-202. 4
Tài liệu liên quan:
-

Bài giảng Chương 7: Tổ chức thực hiện Hợp đồng xuất khẩu môn Quản trị xuất nhập khẩu | Đại học Kinh tế Thành phố Hồ Chí Minh
35 18 -
Bài tập nhóm Trình bày các phương thức thanh toán quốc tế môn Quản trị xuất nhập khẩu | Đại học Kinh tế Thành phố Hồ Chí Minh
180 90 -

Bài thi giữa kỳ môn Quản trị xuất nhập khẩu | Đại học Kinh tế Thành phố Hồ Chí Minh
157 79 -

Nội dung quy trình thực hiện hợp đồng Xuất nhập khẩu môn Quản trị xuất nhập khẩu | Đại học Kinh tế Thành phố Hồ Chí Minh
110 55 -
Bài tập nhóm môn Quản trị xuất nhập khẩu | Đại học Kinh tế Thành phố Hồ Chí Minh
177 89