Báo cáo thực tập Điều khiển tự động hóa hệ thống điện công nghiệp" | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Báo cáo thực tập Điều khiển tự động hóa hệ thống điện công nghiệp" của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Tự động điều khiển (Automotive Engineerings) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






























Preview text:
CHƯƠNG 1: GIỚI THIỆU MATLAB/SIMULINK
111Equation Chapter 1 Section 1
1.1 Kiến thức cần nắm
‒ Cài đặt và hiệu chỉnh Matlab (phiên bản 2016b)
‒ Cách lấy một mô hình mẫu của Matlab
‒ Chạy mô phỏng và xuất dữ liệu một file Simulink có sẳn.
1.2 Hỗ trợ thực hành
Phần mềm và hướng dẫn cài đặt Matlab:
Phần mềm và hướng dẫn cài đặt Matlab link1
Phần mềm và hướng dẫn cài đặt Matlab link2
Phần mềm và hướng dẫn cài đặt Matlab link3 Giáo trình Matlab/Simulink:
matlap va simulink cho ky su dieu khien tu dong
Matlab ĐH Sư Phạm Kỹ Thuật Hồ Chí Minh
Matlab - Đh Bách Khoa Hcm - Hoàng Xuân Dương
Video hướng dẫn sử dụng Matlab/Simulink:
‒ Video hướng dẫn cơ bản về Matlab
‒ Matlab Simulink - Hướng dẫn cơ bản cho người mới bắt đầu
‒ Matlab - Cơ bản - Vẽ đồ thị (phần 1): Vẽ đồ thị 2D bằng lệnh plot
‒ Matlab - ĐKTĐ - Vẽ đáp ứng bước (nấc) của hàm truyền
‒ Video hướng dẫn cài đặt matlab 2016B
‒ Hướng dẫn lấy file mẫu trong thư viện Matlab
1.3 Bài thực hành 01
1.3.1 Bài 1: Cài đặt Matlab
Trình bày chi tiết các bước thực hiện cài đặt và minh chứng cho các bước thực hiện qua
hình chụp tương ứng. Các nội dung công việc:
‒ Tải phần mềm và giải nén phần mềm (nếu có). ‒ Cài đặt phần mềm.
‒ Đăng ký bản quyền phần mềm (hoặc crack).
‒ Khởi động phần mềm.
1.3.2 Bài 2: Mô phỏng một file Simulink mẫu trong thư viện Matlab
Trình bày chi tiết các bước thực hiện và minh chứng cho các bước thực hiện qua hình
chụp tương ứng. Các bước thực hiện bao gồm (nhưng không giới hạn):
‒ Tìm kiếm một file mẫu với từ khóa được gợi ý. Ví dụ “pin năng lượng mặt trời” ‒ Mở file mẫu.
‒ Save file vào một thư mục mới.
‒ Xem kết quả mô phỏng qua khối “Scope”.
‒ Hiệu chỉnh các cài đặt trong khối “Scope”.
‒ Đưa dữ liệu mô phỏng yêu cầu qua file word để viết báo cáo.
1.3.3 Bài 3: Tìm kiếm file mẫu trên internet cho vấn đề cần nghiên cứu.
Trình bày chi tiết các bước thực hiện và minh chứng cho các bước thực hiện qua hình
chụp tương ứng. Các bước thực hiện bao gồm (nhưng không giới hạn):
‒ Tìm kiếm một file mẫu với từ khóa được gợi ý. ‒ Mở file mẫu.
‒ Save file vào một thư mục mới.
‒ Xem kết quả mô phỏng qua khối “Scope”.
‒ Hiệu chỉnh các cài đặt trong khối “Scope”.
‒ Đưa dữ liệu mô phỏng yêu cầu qua file word để viết báo cáo.
CHƯƠNG 2: XÂY DỰNG HÀM TRUYỀN VÀ MÔ HÌNH HÓA
MÔ PHỎNG TRÊN MATLAB/SIMULINK
212Equation Chapter (Next) Section 1
2.1 Kiến thức cần nắm
Xây dựng hàm truyền cho đối tượng vật lý.
Lấy các linh kiện trong thư viện Simulink.
Cách nhập thông số, thay đổi thông số cho các linh kiện trong Simulink.
Kết nối các linh kiện trong Simulink.
Thực hiện đo giá trị các đại lượng dòng điện và điện áp trên các linh kiện và đường dây.
Kiểm tra sự tương thích giữa mô hình vật lý và mô hình hàm truyền trong Simulink.
2.2 Hỗ trợ thực hành
Video hướng dẫn xây dựng khâu tích phân thụ động bậc nhất
Video hướng dẫn xây dựng khâu tỉ lệ tích cực
Video hướng dẫn cách so sánh kết quả xây dựng hàm truyền cho đối tượng vật lý.
Video hướng dẫn cách trình bày báo cáo xây dựng hàm truyền cho đối tượng vật lý.
Xây dựng hàm truyền cho một số mạch điện cơ bản.
2.3 Các file hỗ trợ mô phỏng trên MATLAB Hàm truyền thụ động Hàm truyền tích cực
Xây dựng hàm truyền từ phương trình mô tả trạng thái.
2.4 Bài thực hành 02 2.4.1 Bài tập 1
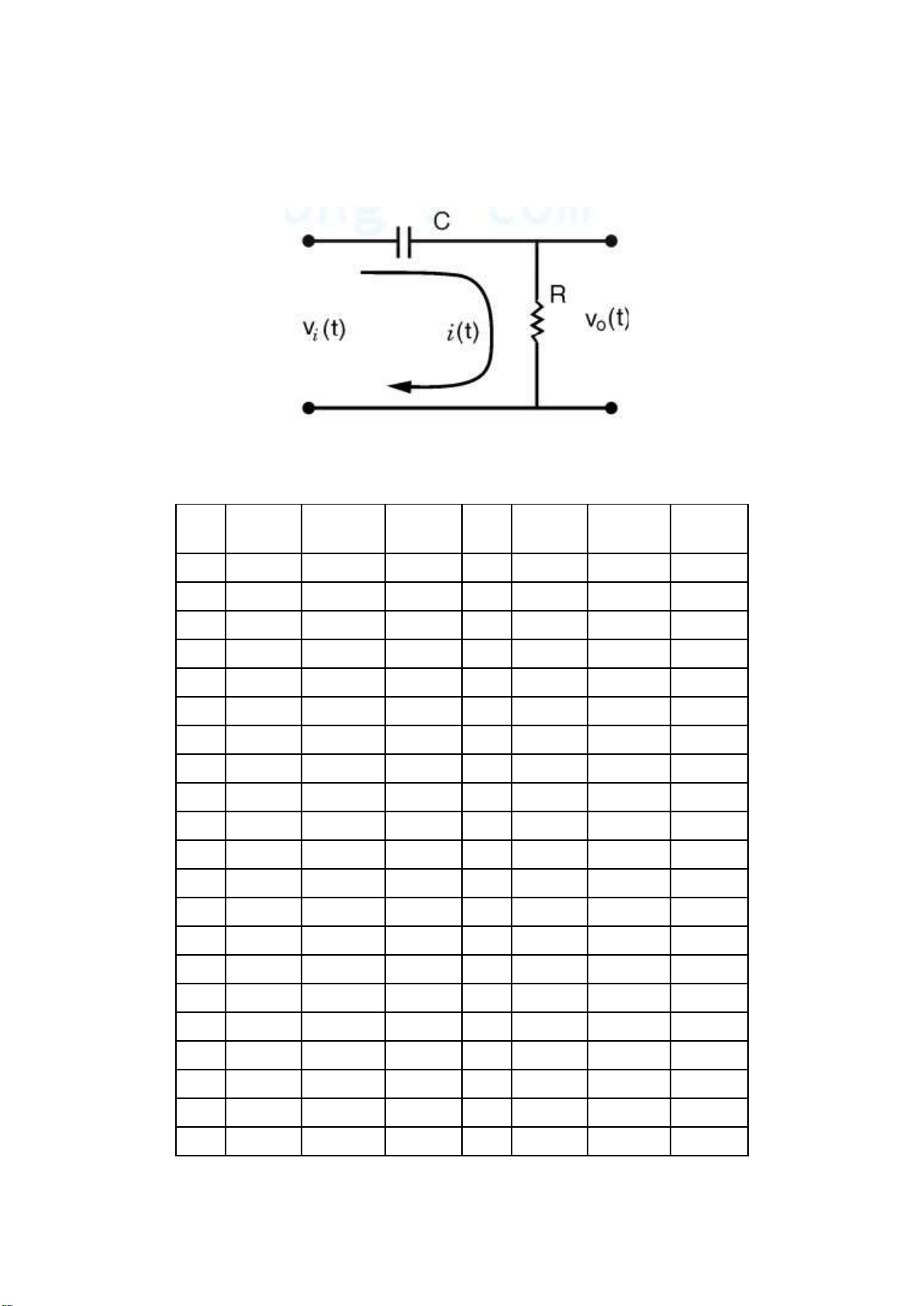
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.1 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.1
Bảng 2.1 Thông số bài tập ST R=R1 R2 ST R=R1 R2 C (uF) C (uF) T (kOhm) (kOhm) T (kOhm) (kOhm) 1 15 147 220 26 14 144 216 2 20 195 293 27 6 55 83 3 20 201 301 28 4 44 66 4 3 31 47 29 3 28 42 5 17 168 253 30 13 127 191 6 19 190 285 31 12 124 186 7 21 210 315 32 15 155 232 8 19 188 281 33 3 33 50 9 18 183 275 34 22 216 324 10 9 94 141 35 22 216 324 11 6 64 96 36 17 168 252 12 22 216 323 37 9 86 128 13 17 172 257 38 18 181 271 14 4 37 56 39 12 118 177 15 8 77 116 40 13 125 188 16 5 52 78 41 13 128 191 17 12 122 183 42 15 149 223 18 13 133 200 43 20 205 307 19 11 111 166 44 13 126 189 20 14 140 210 45 3 29 44 21 14 137 205 46 3 33 49 22 11 109 164 47 8 77 116 23 8 82 123 48 15 146 219 24 4 40 61 49 11 114 172 25 14 136 204 50 5 46 69 2.4.2 Bài tập 2
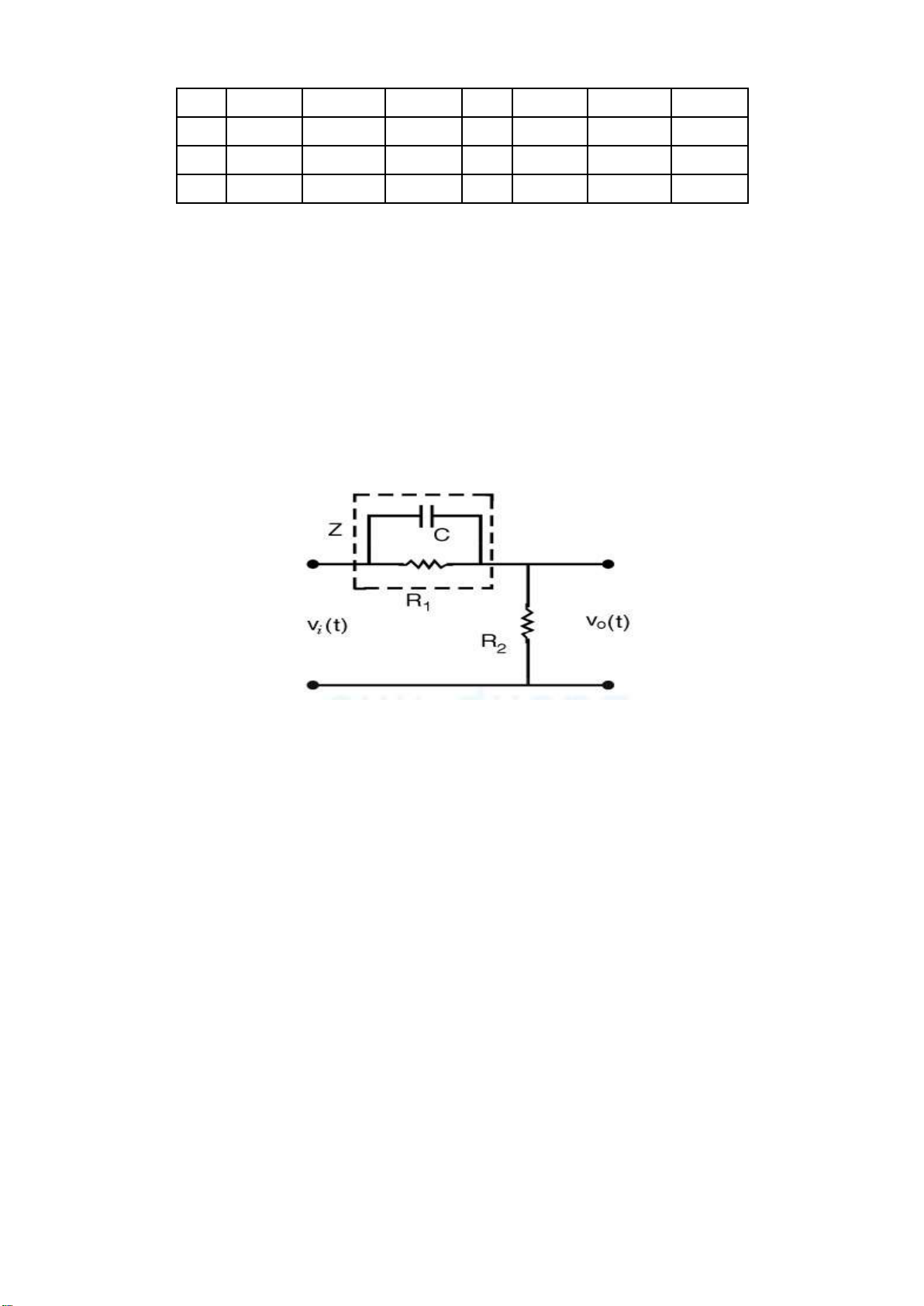
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.2 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.2 2.4.3 Bài tập 3
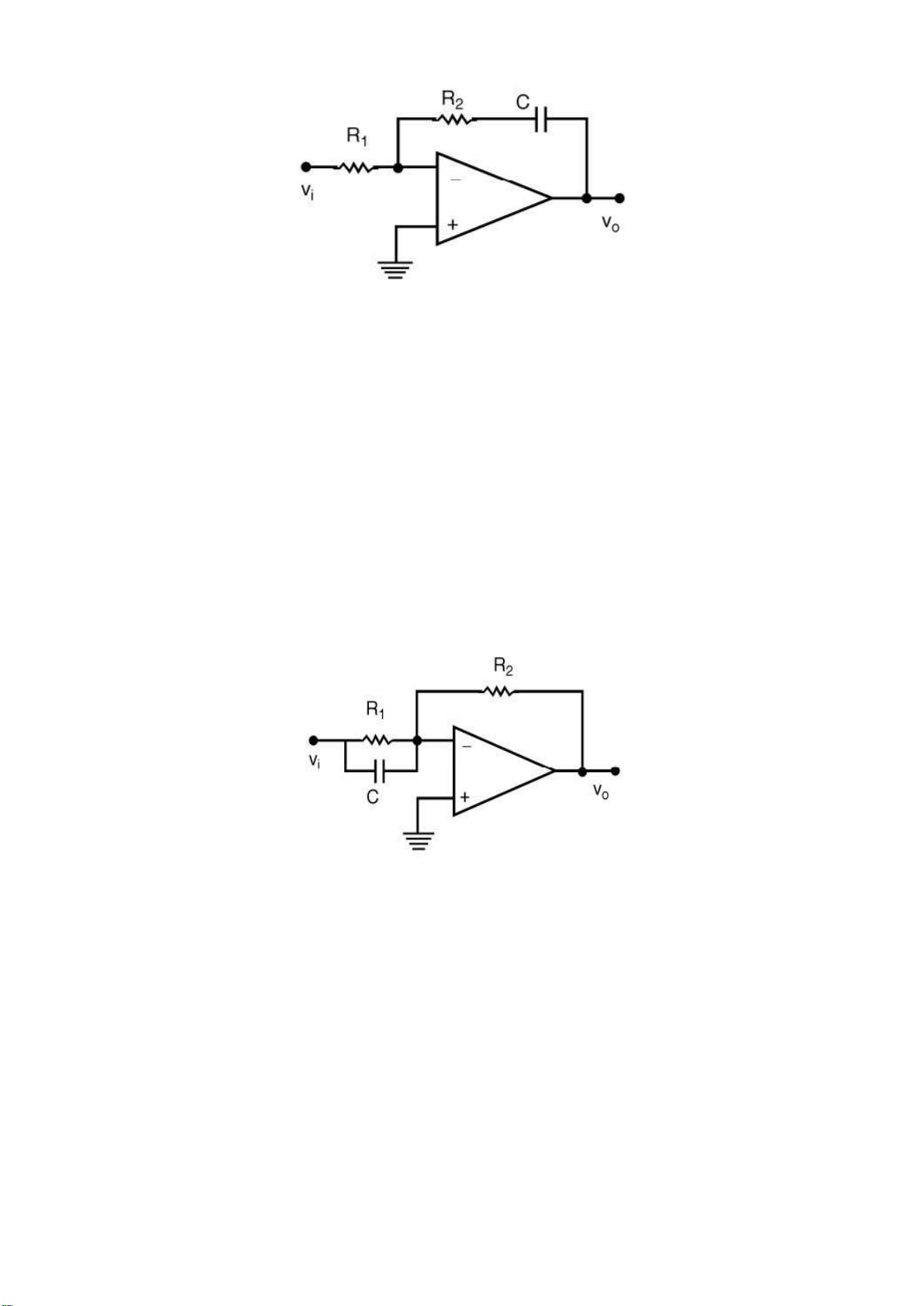
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.3 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.3 2.4.4 Bài tập 4
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.4 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.4 2.4.5 Bài tập 5
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.5 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.5 2.4.6 Bài tập 6
Xây dựng hàm truyền thể hiện mối liên hệ giữa điện áp ngõ vào và điện áp ngõ ra cho
mạch điện trong Hình 2.6 với các thông số của linh kiện được cho trong Bảng 2.1. Thực hiện
và báo cáo kết quả xây dựng mô hình qua các nội dung sau:
‒ Xây dựng hàm truyền cho mạch.
‒ Xây dựng mô hình mô phỏng cho mạch điện và hàm truyền trên cùng một file Simulink.
‒ Chứng minh sự tương thích giữa mạch điện và hàm truyền được xây dựng. Hình 2.6 CHƯƠNG 3:
ĐẠI SỐ HÀM TRUYỀN CHO HTĐKTĐ MỘT VÒNG
3.1 Kiến thức cần nắm
Xác định hàm truyền tương đương cho các hàm truyền mắc nối tiếp, mắc song song và
mắc hồi tiếp âm thông qua lập trình.
Tìm hàm truyền tương đương.
Kiểm tra tính tương đương của hai hàm truyền.
3.2 Hỗ trợ thực hành
Video tính toán hàm truyền tương đương của các hàm đơn giản
Video hướng dẫn tương đương các hàm truyền một vòng lặp
File mô phỏng hàm truyền nối tiếp - code
File mô phỏng hàm truyền nối tiếp - sim
File mô phỏng hàm truyền song song – code
File mô phỏng hàm truyền song song – sim
File mô phỏng hàm truyền hồi tiếp – code
File mô phỏng hàm truyền hồi tiếp – sim
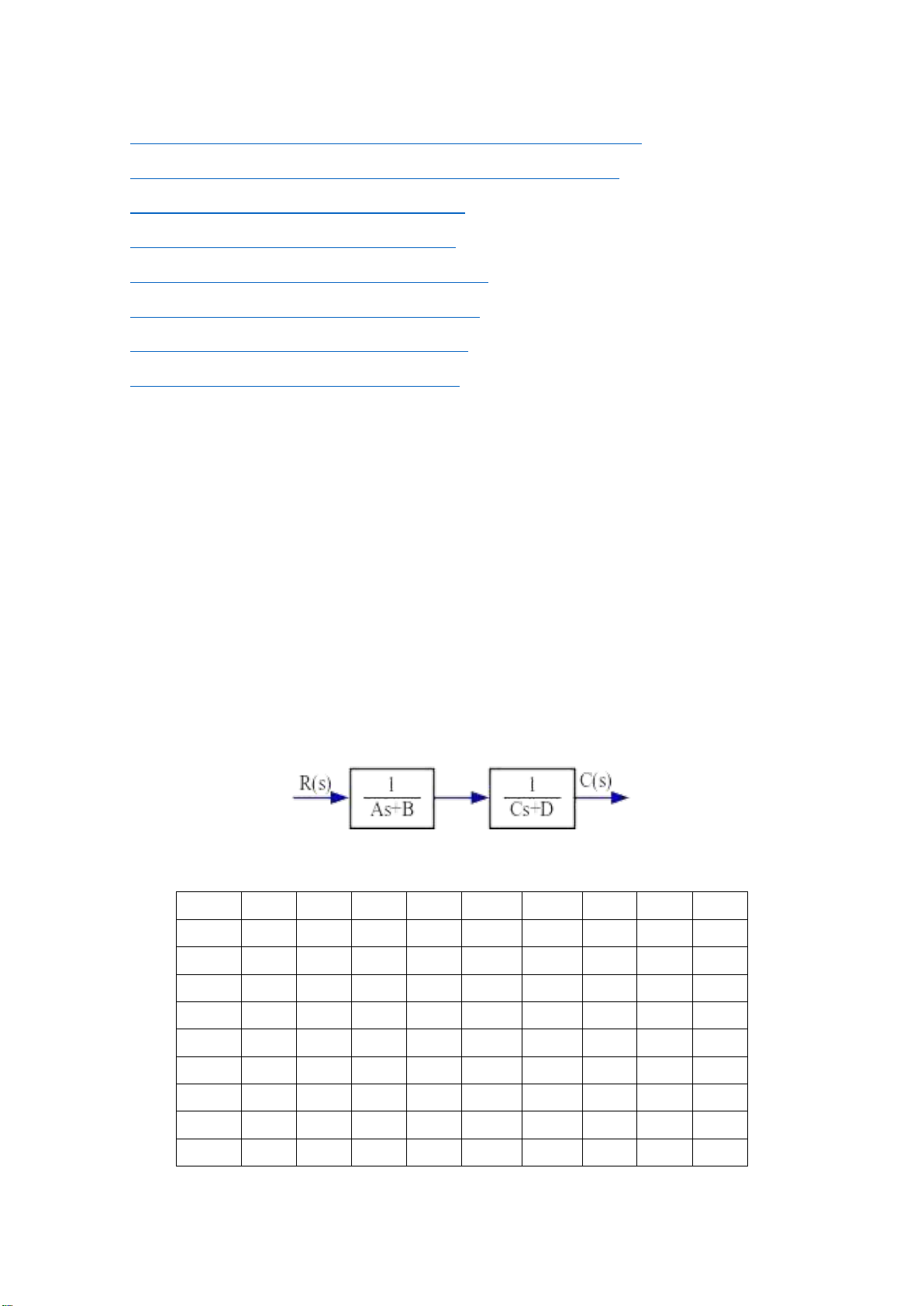
3.3 Bài thực hành 03 3.3.1 Bài tập 1
Cho hàm truyền hệ thống như trong Hình 3.7. Các thông số A,B,C,D của hàm truyền hệ
thống tương ứng với từng sinh viên được cho trong Bảng 3.2. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 3.7 Bảng 3.2 STT A B C D STT A B C D 1 3 2 22 11 26 19 6 6 2 2 12 5 13 3 27 16 17 4 20 3 2 8 2 14 28 22 15 11 12 4 19 9 18 7 29 12 13 16 9 5 9 14 12 6 30 17 14 4 8 6 19 13 10 18 31 14 15 15 11 7 9 19 10 9 32 12 11 20 14 8 7 6 4 12 33 13 5 20 9 9 17 13 7 17 34 19 15 6 20 10 6 17 14 18 35 21 20 16 19 11 17 18 14 18 36 3 3 19 9 12 9 15 10 12 37 16 14 22 16 13 18 19 7 18 38 9 9 4 11 14 21 22 17 7 39 5 4 19 8 15 17 14 6 7 40 7 6 13 22 16 22 12 16 19 41 20 4 14 5 17 22 12 3 16 42 7 8 22 13 18 16 6 14 9 43 14 15 16 18 19 3 12 9 8 44 9 20 17 12 20 5 15 22 7 45 7 8 16 19 21 17 12 21 12 46 12 11 19 8 22 12 20 10 10 47 4 11 3 2 23 4 12 4 8 48 21 19 13 20 24 6 7 16 18 49 12 5 10 8 25 18 21 5 14 50 12 5 18 22 3.3.2 Bài tập 2
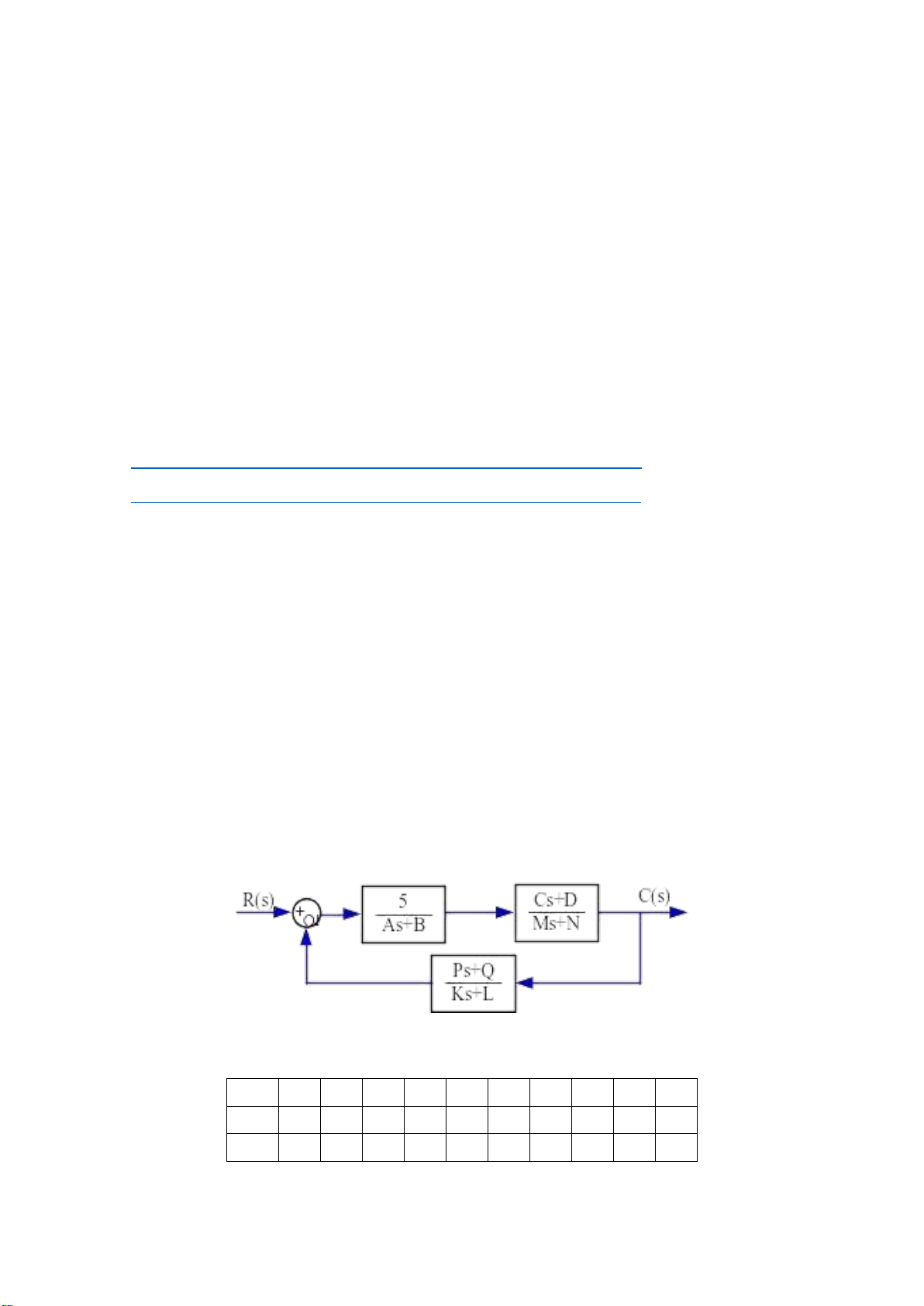
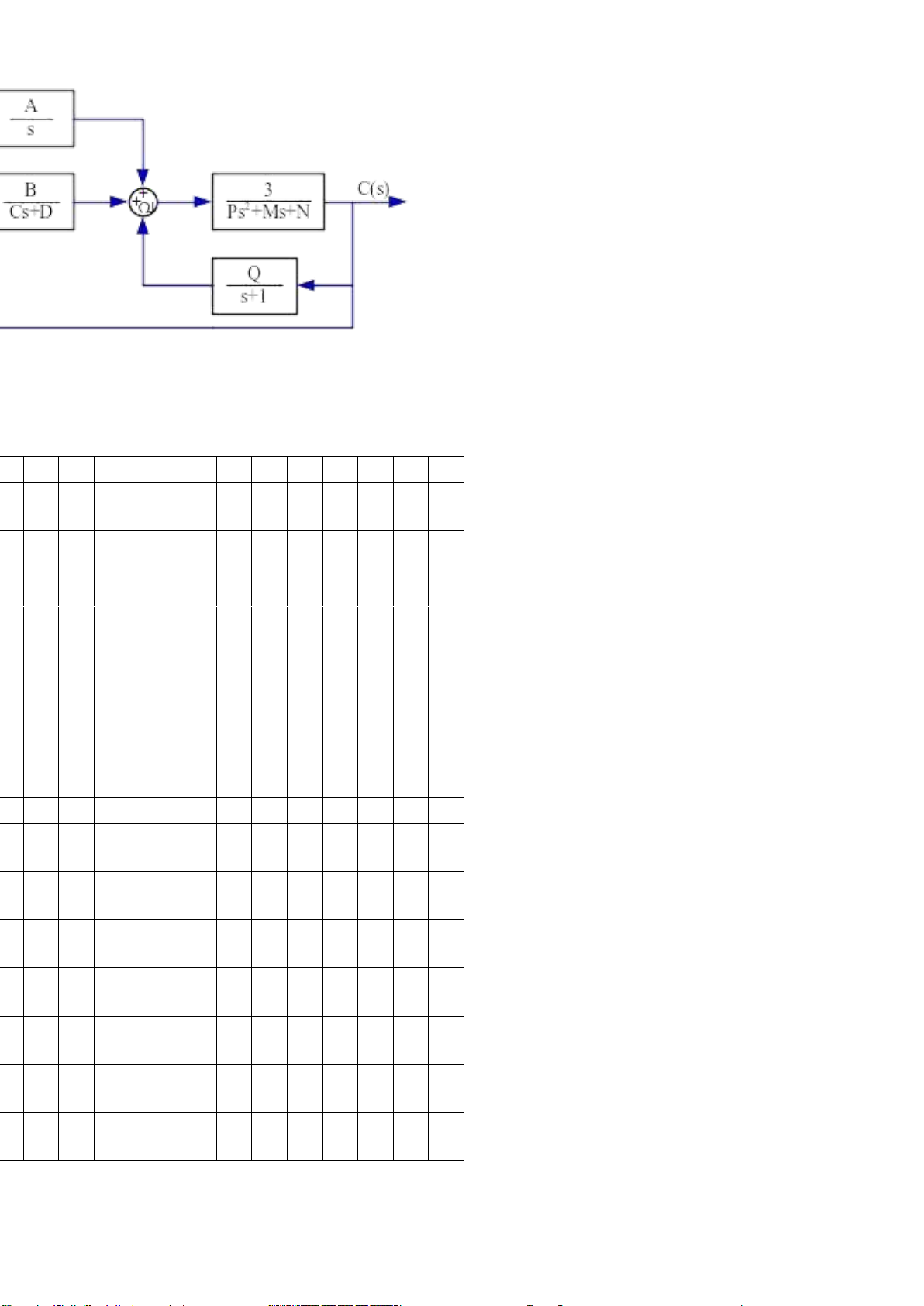
Cho hàm truyền hệ thống như trong Hình 3.8 Các thông số A,B,C,D của hàm truyền hệ
thống tương ứng với từng sinh viên được cho trong Bảng 3.2. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 3.8 3.3.3 Bài tập 3
Cho hàm truyền hệ thống như trong Hình 3.9. Các thông số A,B,C,D của hàm truyền hệ
thống tương ứng với từng sinh viên được cho trong Bảng 3.2. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 3.9 3.3.4 Bài tập 4
Cho hàm truyền hệ thống như trong Hình 3.10. Các thông số A,B,C,D của hàm truyền
hệ thống tương ứng với từng sinh viên được cho trong Bảng 3.2. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 3.10 CHƯƠNG 4:
ĐẠI SỐ HÀM TRUYỀN CHO HTĐKTĐ
PHỨC TẠP NHIỀU VÒNG
4.1 Kiến thức cần nắm
Xác định hàm truyền tương đương cho các hàm truyền mắc nối tiếp, mắc song song và
mắc hồi tiếp âm thông qua lập trình.
Tìm hàm truyền tương đương.
Kiểm tra tính tương đương của hai hàm truyền.
4.2 Hỗ trợ thực hành
Video tính toán hàm truyền tương đương của các hàm đơn giản
Video tính toán hàm truyền tương đương của các hàm phức tạp.
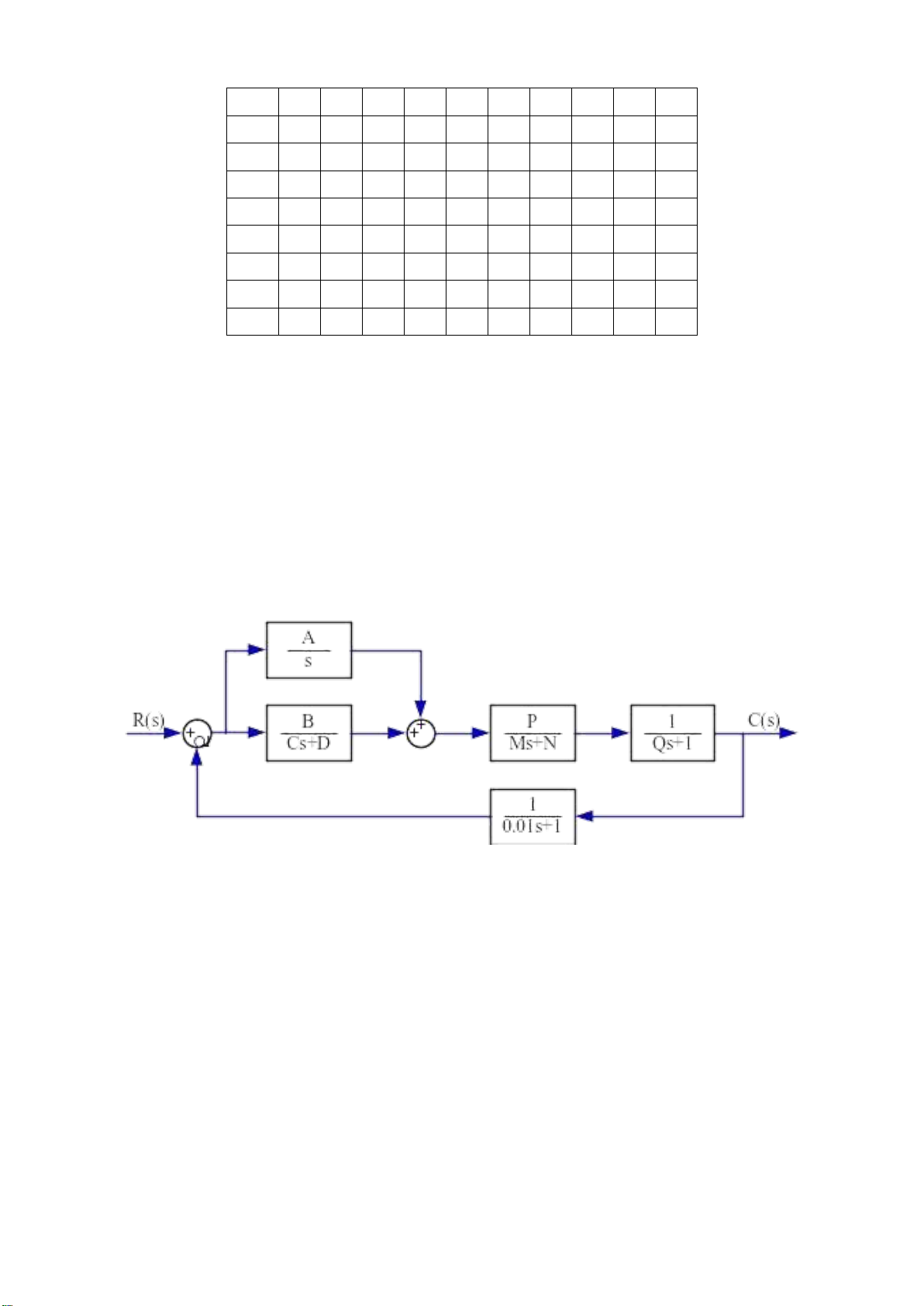
4.3 Bài thực hành 04 4.3.1 Bài tập 1
Cho hàm truyền hệ thống như trong Hình 4.11. Các thông số A,B,C,D của hàm truyền
hệ thống tương ứng với từng sinh viên được cho trong Bảng 4.3. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
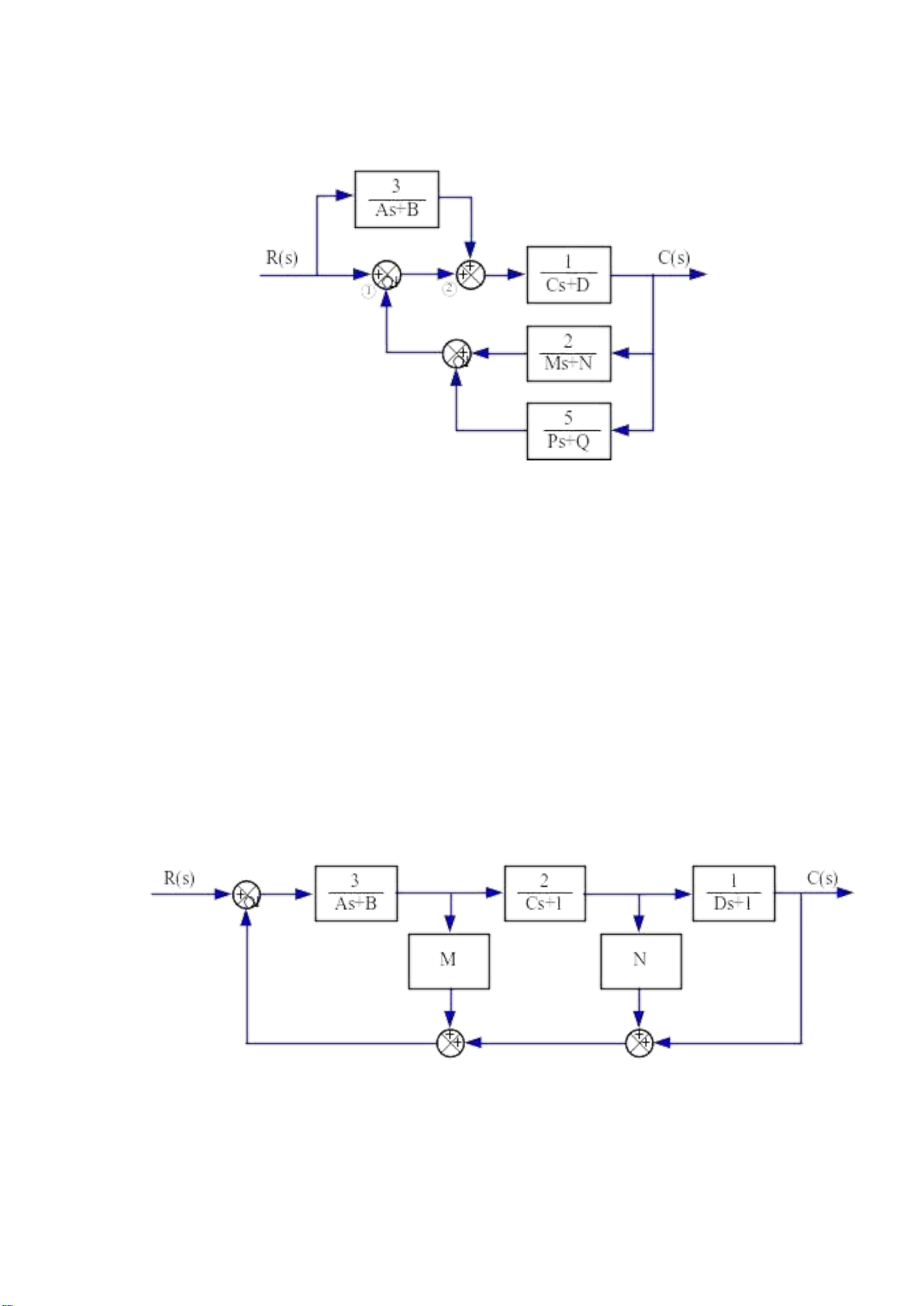
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 4.11 Bảng 4.3 STT A B C D M N P Q K L 1 6 3 10 17 22 21 18 19 21 12 2 21 2 12 4 20 22 21 18 8 17 3 14 11 10 21 13 7 5 10 18 3 4 21 13 17 15 14 9 9 7 14 20 5 4 9 11 18 20 19 4 19 13 18 6 8 8 18 19 3 16 6 4 14 14 7 9 10 15 3 4 7 2 17 18 3 8 15 13 3 9 16 19 13 16 9 20 9 9 12 20 20 20 11 15 19 16 8 10 4 7 16 14 13 13 16 4 8 14 11 18 5 8 4 16 9 6 16 18 20 12 20 20 6 11 13 7 15 21 18 9 13 22 10 3 17 15 6 10 7 4 8 14 4 21 10 9 6 5 11 18 16 14 15 17 9 7 5 10 13 22 17 20 10 16 20 10 12 6 12 3 13 9 6 18 17 9 3 21 8 5 2 21 5 15 20 18 16 7 18 18 9 15 21 12 16 9 19 11 5 12 19 19 3 6 16 17 5 20 6 21 2 11 14 20 8 19 11 21 21 8 15 21 21 16 14 11 16 3 12 22 12 8 8 11 3 15 3 17 8 20 23 12 5 15 2 2 6 20 13 13 12 24 2 19 2 5 13 19 15 12 18 13 25 9 20 14 12 5 22 2 6 10 17 26 12 16 18 11 20 21 5 12 4 11 27 9 9 2 18 19 3 13 4 20 9 28 16 11 4 19 6 15 16 15 5 11 29 14 11 8 16 19 20 6 8 8 14 30 12 5 12 14 19 3 20 16 14 6 31 18 4 20 16 18 12 3 21 21 9 32 22 18 20 12 18 15 8 7 14 9 33 18 19 17 15 18 9 21 11 22 16 34 14 12 10 19 15 3 13 4 12 5 35 16 11 7 2 12 17 18 22 2 5 36 12 9 16 9 5 16 17 16 8 21 37 3 4 19 20 5 22 19 10 15 20 38 15 7 11 22 19 19 6 11 14 10 39 10 10 19 2 4 2 12 19 5 19 40 7 6 8 17 18 8 19 6 21 5 41 15 5 8 6 11 15 16 14 20 18 42 16 21 22 11 8 11 17 5 7 21 43 8 8 3 9 15 3 18 17 19 11 44 6 13 19 8 16 7 20 5 9 9 45 14 8 6 7 20 12 17 16 15 20 46 10 3 4 12 12 12 18 15 8 16 47 4 22 13 2 3 16 19 13 7 18 48 14 5 18 8 13 11 6 13 9 4 49 6 14 4 16 13 21 20 14 9 6 50 4 5 5 15 15 9 15 16 10 18 4.3.2 Bài tập 2
Cho hàm truyền hệ thống như trong Hình 4.12. Các thông số của hàm truyền hệ thống
tương ứng với từng sinh viên được cho trong Bảng 4.3. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 4.12 4.3.3 Bài tập 3
Cho hàm truyền hệ thống như trong Hình 4.13. Các thông số của hàm truyền hệ thống
tương ứng với từng sinh viên được cho trong Bảng 4.3. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 4.13 4.3.4 Bài tập 4
Cho hàm truyền hệ thống như trong Hình 4.14. Các thông số A,B,C,D của hàm truyền
hệ thống tương ứng với từng sinh viên được cho trong Error: Reference source not found. Hãy thực hiện:
‒ Viết chương trình tính toán hàm truyền tương đương cho hệ thống này.
‒ Xây dựng mô hình thể hiện hàm truyền hệ thống này và hệ thống tương đương trong cùng một file Simulink.
‒ Chứng minh sự tương đương giữa mô hình hệ thống này và mô hình hệ thống của
hàm truyền tương đương thu được thông qua mô phỏng kết quả ngõ ra. Hình 4.14 lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU CHƯƠNG 5:
CHUẨN ỔN ĐỊNH ĐẠI SỐ ROUTH
5.1 Kiến thức cần nắm
Kiến thức về ổn định hệ thống ĐKTĐ.
Đánh giá ổn định hệ thống ĐKTĐ dựa trên tiêu chuẩn ổn định đại số Routh.
5.2 Hỗ trợ thực hành
Routh-Hurwitz Criterion, An Introduction
Routh-Hurwitz Criterion, Special Cases
Routh-Hurwitz Criterion, Beyond Stability
Tiêu chuẩn ổn định Routh_tập 1
Tiêu chuẩn ổn định Routh_tập 2
5.3 Bài thực hành 05 5.3.1 Bài tập 1
Hệ thống ĐKTĐ có phương trình đặc trưng .
Hãy đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Routh với các thông số được cho trong Bảng 5.4 Bảng 5.4 STT A B C D E F STT A B C D E F 1 4 9 8 19 18 12 26 9 15 9 20 13 14 2 5 13 9 22 7 10 27 20 21 4 10 12 7 3 18 4 2 3 16 2 28 9 13 10 13 6 3 4 4 4 12 2 5 9 29 10 13 17 21 5 11 5 13 12 5 3 11 14 30 15 12 7 13 22 9 6 16 15 15 10 14 16 31 11 12 6 15 8 7 7 14 2 21 13 5 20 32 7 19 12 6 14 3 lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU 8 19 20 10 4 6 7 33 15 18 10 16 14 12 9 19 7 17 4 3 18 34 7 18 6 13 6 15 10 12 13 5 4 14 12 35 17 14 8 17 17 4 11 19 12 21 12 2 18 36 3 17 2 5 5 22 12 20 19 17 10 19 16 37 13 3 15 7 5 4 13 18 12 11 5 9 18 38 21 6 8 12 10 7 14 12 4 11 11 16 11 39 5 8 3 18 19 4 15 16 13 8 21 11 19 40 18 6 19 2 18 12 16 3 12 11 10 4 9 41 3 7 15 6 5 20 17 6 6 20 7 5 21 42 21 5 5 6 12 18 18 12 17 17 12 20 7 43 22 10 10 18 12 10 19 14 8 7 16 17 15 44 3 18 15 15 18 6 20 5 15 21 4 6 13 45 15 19 4 21 6 22 21 16 16 9 15 16 15 46 18 4 5 17 21 15 22 17 18 13 14 13 3 47 19 15 15 21 11 5 23 3 18 18 4 17 7 48 20 7 4 11 17 8 24 14 17 7 7 5 20 49 12 15 11 18 17 21 25 18 5 10 3 22 11 50 22 3 19 4 14 9 5.3.2 Bài tập 2
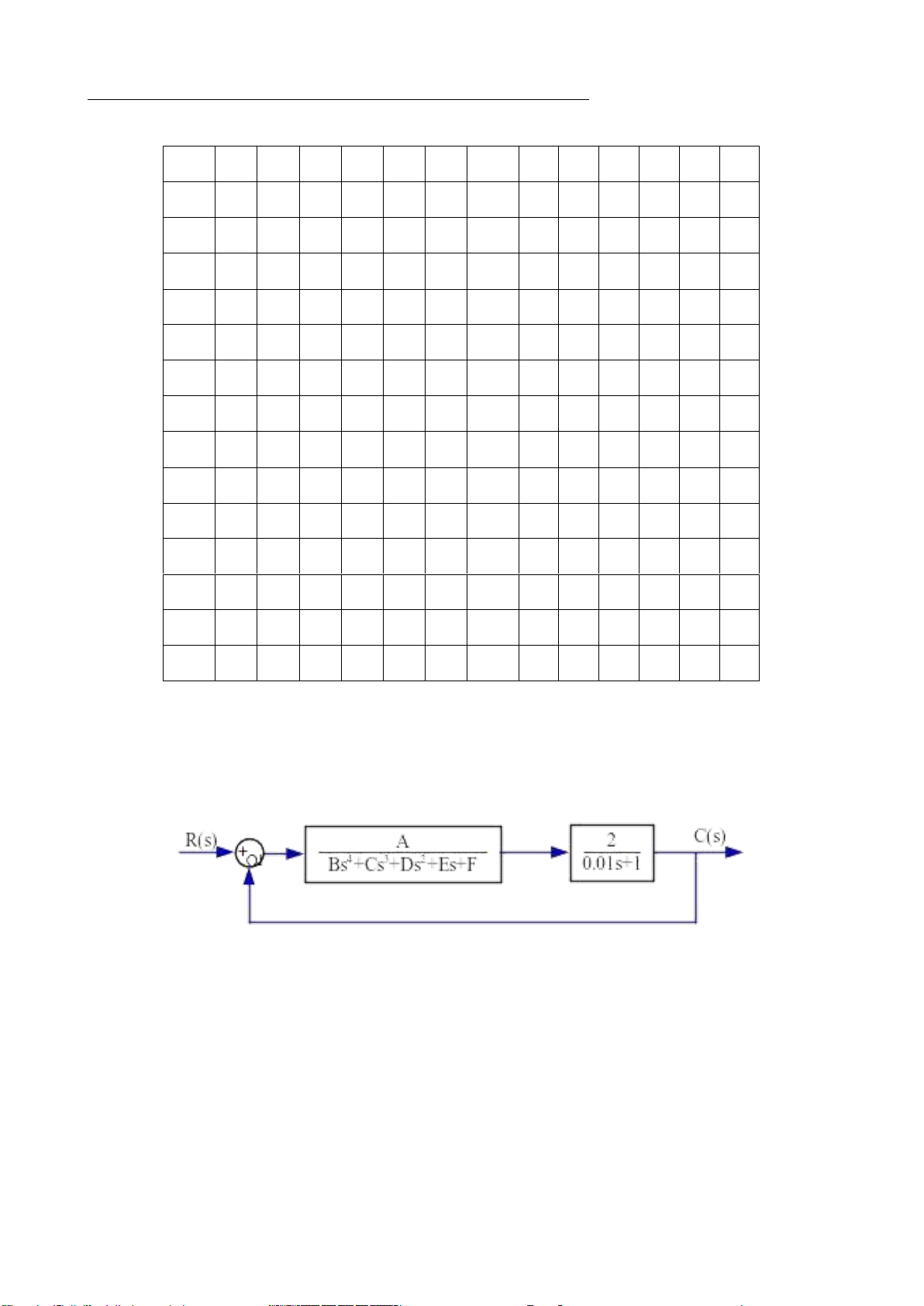
Đánh giá ổn định cho hệ thống điều khiển tự động thể hiện như trong Hình 5.15. Hãy
đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Routh với các thông số được cho trong Bảng 5.4 Hình 5.15 CHƯƠNG 6: lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU
CHUẨN ỔN ĐỊNH ĐẠI SỐ HURWITZ
6.1 Kiến thức cần nắm
Kiến thức về ổn định hệ thống ĐKTĐ.
Đánh giá ổn định hệ thống ĐKTĐ dựa trên tiêu chuẩn ổn định đại số Hurwitz.
6.2 Hỗ trợ thực hành
Routh-Hurwitz Criterion, An Introduction
Routh-Hurwitz Criterion, Special Cases
Routh-Hurwitz Criterion, Beyond Stability
Tiêu chuẩn ổn định Hurwitz
6.3 Bài thực hành 06 6.3.1 Bài tập 1
Hệ thống ĐKTĐ có phương trình đặc trưng .
Hãy đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Hurwitz với các thông số được cho trong Bảng 6.5 Bảng 6.5 STT A B C D E F STT A B C D E F 1 4 9 8 19 18 12 26 9 15 9 20 13 14 2 5 13 9 22 7 10 27 20 21 4 10 12 7 3 18 4 2 3 16 2 28 9 13 10 13 6 3 4 4 4 12 2 5 9 29 10 13 17 21 5 11 5 13 12 5 3 11 14 30 15 12 7 13 22 9 6 16 15 15 10 14 16 31 11 12 6 15 8 7 7 14 2 21 13 5 20 32 7 19 12 6 14 3 8 19 20 10 4 6 7 33 15 18 10 16 14 12 9 19 7 17 4 3 18 34 7 18 6 13 6 15 10 12 13 5 4 14 12 35 17 14 8 17 17 4 lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU 11 19 12 21 12 2 18 36 3 17 2 5 5 22 12 20 19 17 10 19 16 37 13 3 15 7 5 4 13 18 12 11 5 9 18 38 21 6 8 12 10 7 14 12 4 11 11 16 11 39 5 8 3 18 19 4 15 16 13 8 21 11 19 40 18 6 19 2 18 12 16 3 12 11 10 4 9 41 3 7 15 6 5 20 17 6 6 20 7 5 21 42 21 5 5 6 12 18 18 12 17 17 12 20 7 43 22 10 10 18 12 10 19 14 8 7 16 17 15 44 3 18 15 15 18 6 20 5 15 21 4 6 13 45 15 19 4 21 6 22 21 16 16 9 15 16 15 46 18 4 5 17 21 15 22 17 18 13 14 13 3 47 19 15 15 21 11 5 23 3 18 18 4 17 7 48 20 7 4 11 17 8 24 14 17 7 7 5 20 49 12 15 11 18 17 21 25 18 5 10 3 22 11 50 22 3 19 4 14 9 6.3.2 Bài tập 2
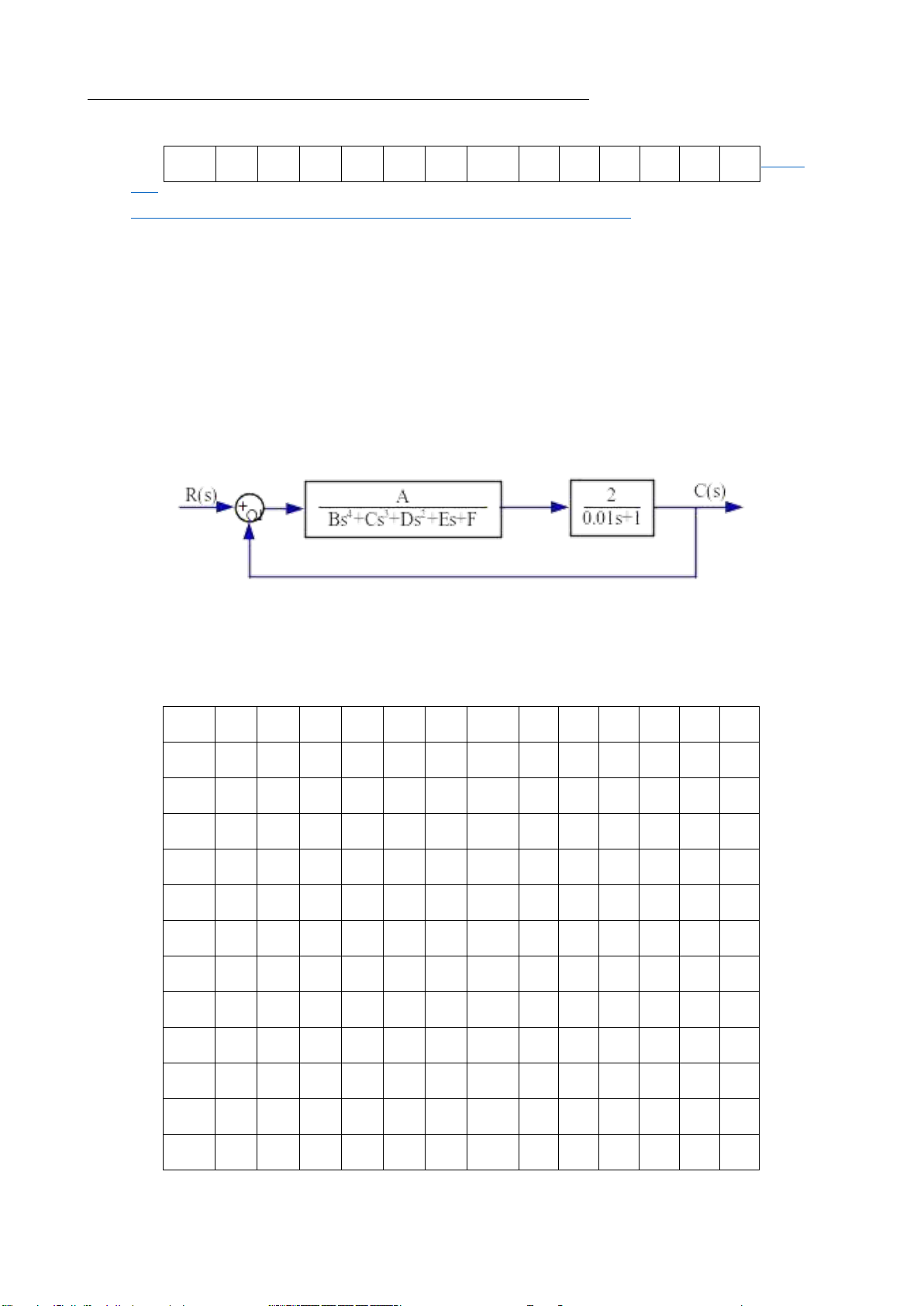
Đánh giá ổn định cho hệ thống điều khiển tự động thể hiện như trong Hình 6.16. Hãy
đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Hurwitz với các thông số được cho trong Bảng 6.5 Hình 6.16 CHƯƠNG 7:
CHUẨN ỔN ĐỊNH TẦN SỐ BODE
7.1 Kiến thức cần nắm
Kiến thức về ổn định hệ thống ĐKTĐ.
Đánh giá ổn định hệ thống ĐKTĐ dựa trên tiêu chuẩn ổn định tần số Bode. lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU
7.2 Hỗ trợ thực hành
Video đánh giá ổn định hệ thống ĐKTĐ dựa trên tiêu chuẩn ổn định tần số Bode.
Control System Lectures - Bode Plots, Introduction
Bode Plots by Hand: Real Constants
Bode Plots by Hand: Poles and Zeros at the Origin STT A B C D E F STT A B C D E F 1 6 5 21 17 15 13 26 16 10 21 19 6 4 2 10 17 4 8 15 18 27 21 7 12 5 21 7 3 16 10 11 17 4 21 28 8 19 22 8 15 5 4 14 14 13 3 22 5 29 19 3 6 9 5 9 lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU 5 4 15 13 15 17 4 30 3 4 9 4 9 18 DẠY LÝ
THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG_tập 10: vẽ biểu đồ Bode
7.3 Bài thực hành 07 7.3.1 Bài tập 1
Đánh giá ổn định cho hệ thống điều khiển tự động thể hiện như trong Hình 7.17. Hãy
đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Bode với các thông số được cho trong Bảng 7.6 Hình 7.17 Bảng 7.6 6 6 19 2 11 14 7 31 5 7 16 20 8 17 7 21 20 5 14 12 11 32 19 9 8 11 9 22 8 7 4 12 19 11 3 33 13 15 9 6 4 13 9 5 9 13 9 9 17 34 21 6 12 21 6 8 10 22 4 17 18 15 9 35 17 19 7 3 10 10 11 21 22 21 22 18 14 36 4 12 15 6 21 2 12 8 2 14 12 21 12 37 22 13 8 13 17 2 13 14 20 14 5 20 5 38 13 9 21 3 6 19 14 22 14 16 20 7 7 39 7 3 5 22 10 2 15 20 15 7 3 20 17 40 21 2 14 18 9 2 16 3 13 4 18 17 3 41 18 11 20 19 12 4 17 6 13 5 5 19 19 42 21 11 20 3 21 15 18 6 5 19 4 5 12 43 4 11 4 3 3 2 lOMoARcPSD| 36443508
Bài tập môn TT ĐKTĐH HTD CN GV: Phạm Quốc Khanh ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU 19 3 17 17 11 17 10 44 22 17 19 6 19 6 20 9 13 17 12 17 6 45 18 2 14 20 8 21 21 16 8 20 18 5 15 46 10 12 8 6 3 14 22 6 18 4 20 21 20 47 18 4 21 15 7 19 23 13 4 4 15 11 11 48 13 10 12 7 6 8 24 8 9 4 9 10 14 49 14 18 15 11 12 3 25 10 17 5 13 9 18 50 10 18 15 15 22 6 7.3.2 Bài tập 2
Đánh giá ổn định cho hệ thống điều khiển tự động thể hiện như trong Hình 7.18. Hãy
đánh giá ổn định cho hệ thống này bằng tiêu chuẩn ổn định Bode với các thông số được cho trong Bảng 7.7 Hình 7.18 Bảng 7.7 M N P Q STT A B C D M N P Q 21 6 21 7 26 8 10 3 19 10 6 18 14 16 20 8 3 27 7 20 10 17 20 8 12 18 1 1 3 6 13 28 10 11 22 13 16 17 9 6 8 1 14 11 5 4 29 16 13 14 11 8 11 13 2 2 1 16 16 8 30 3 5 7 12 14 18 11 0 1 2 1 12 2 6 31 21 8 4 4 5 11 11 1 7 2 3 3 12 6 32 7 19 19 12 9 10 6 1 15 10 8 3 33 9 7 2 20 22 2 13 9 1 2 14 15 34 13 16 14 8 6 7 10 2 5 1 22 10 16 35 21 19 2 20 20 4 9 13 2 1 4 22 5 36 3 6 15 7 2 4 17 12 0 1 13 16 10 4 37 3 6 11 15 13 20 10 1 1 14 22 10 8 38 2 9 9 9 10 21 21 3 2 9 17 15 4 39 4 16 4 17 10 14 15 1 1 4 12 10 4 40 11 16 20 21 21 10 5 4 1 21 10 19 7 41 12 17 16 8 7 4 18 9 10 14 21 1 42 11 6 4 15 21 1 8 20 0 0 6 1 1 18 21 2 14 17 20 16 43 8 21 20 16 15 3 9 8 9 8 1 1 19 19 3 6 13 3 22 44 11 10 6 5 10 6 11 21 3 6 1 20 8 22 9 11 19 10 7 45 10 20 11 20 18 4 20 6 4 1 1 21 8 8 11 18 18 20 2 46 8 8 8 16 7 20 3 0 4 1 22 20 3 19 9 12 12 6 7 47 16 12 9 3 13 18 20 6 23 2 5 18 7 6 14 2 6 48 7 13 6 11 9 5 21 12 1 2 2 24 9 12 5 6 16 18 49 14 5 5 12 12 5 11 4 0 0 2 1 1 25 10 16 17 14 9 21 50 8 4 4 5 15 14 17 2 3 4
CHƯƠNG 8: BÁO CÁO THỰC HÀNH GIỮA KỲ LẦN 1
8.1 Nội dung thực hiện:
8.1.1 Báo cáo giữa kỳ
Sinh viên thực hiện báo cáo giữa kỳ theo nội dung được cung cấp: Link tài liệu Sinh
viên sẽ nộp một file nén dưới định dạng .rar bao gồm các nội dung sau:
‒ File báo cáo có định dạng pdf.
‒ Các file mô phỏng cho các bài thực hành được cung cấp trong tài liệu.
‒ Tên file .rar nộp có cấu trúc : “NopBaiGiuaKy_MSSV_Lop_HoTen”. Trong đó
HoTen là họ và tên viết liền không dấu.
‒ Sau buổi học sinh viên có thời gian một tuần (7 ngày) để nộp bài lên hệ thống. Mọi
lý do chậm trễ sẽ không được chấp nhận.
Bài làm sẽ được tính 50% điểm giữa kỳ.
8.1.2 Trắc nghiệm giữa kỳ
Sinh viên thực hiện một bài trắc nghiệm trong thời gian 75 phút trên hệ thống học vụ LMS của trường.
Bài làm sẽ được tính 50% điểm giữa kỳ.
CHƯƠNG 9: TÌM HIỂU BIẾN TẦN IG5A
9.1 Kiến thức cần nắm
Kiến thức cơ bản về điện tử công suất và điều khiển bộ nghịch lưu.
Tài liệu kỹ thuật về biến tần IG5A: Cấu hình, sơ đồ chân chức năng, sơ đồ kết nối, thiết
lập các thông số điều khiển, thiết lập các chế độ vận hành.
9.2 Hỗ trợ thực hành
Video hướng dẫn cơ bản về biến tần
Video nguyên lý hoạt động của biến tần
Tài liệu kỹ thuật về IG5A
File mô hình hóa mô phỏng IG5A
9.3 Bài thực hành 09: Tìm hiểu biến tần IG5A
Trình bày các yếu tố kỹ thuật chính liên quan đến biến tần IG5A, bao gồm:
1. Trình bày chức năng các chân I/O của biến tần (bao gồm các chân điều khiển và công suất)
2. Trình bày kết nối các thiết bị ngoại vi với biến tần (Connection of peripheral devices
to the inverter). Trình bày nhiệm vụ của từng thiết bị trong hệ thống kết nối.
3. Nêu cách thức lựa chọn MCCB và cầu chì cho IG5A khi kết nối các thiết bị bảo vệ này với IG5A.
4. Nêu các phương pháp dừng biến tần và kết nối chân cho từng phương pháp này.
5. Trình bày kết nối các chân của biến tần để biến tần có thể chạy theo chiều thuận,
chạy theo chiều ngược, hoặc ngưng chạy.
6. Trình bày phương pháp và các kết nối để thay đổi điện áp và tần số biến tần dựa trên thay đổi điện áp.
7. Thiết lập đặc tuyến V/f của biến tần. Ý nghĩa của đường đặc tuyến V/f? Nêu các
bước thiết lập đặc tuyến V/f của biến tần.
CHƯƠNG 10: XÂY DỰNG MÔ HÌNH HÓA MÔ PHỎNG BIẾN TẦN IG5A
10.1 Kiến thức cần nắm
Kiến thức cơ bản về điện tử công suất và điều khiển bộ nghịch lưu.
Tài liệu kỹ thuật về biến tần IG5A: Cấu hình, sơ đồ chân chức năng, sơ đồ kết nối, thiết
lập các thông số điều khiển, thiết lập các chế độ vận hành.
10.2 Hỗ trợ thực hành
Video hướng dẫn cơ bản về biến tần
Video nguyên lý hoạt động của biến tần
Tài liệu kỹ thuật về IG5A
File mô hình hóa mô phỏng IG5A 10.3 Bài thực hành
Dựa trên các thông tin đã tìm hiểu được, hãy xây dựng mô hình hóa mô phỏng cho biến
tần IG5A với các yêu cầu như sau:
Bảng 10.8 Thông số biến tần Thông số Yêu cầu kỹ thuật
Dãy điện áp hoạt động 50-380Vac Tần số hoạt động 10-55 Hz
Phương pháp điều khiển V/f
Khả năng thiết lập đặc tuyến V/f Có
Các nội dung cần thực hiện:
1. Xác định các chân tín hiệu ngõ vào và chân công suất ngõ ra của biến tần.
2. Xây dựng thuật toán xác định tần số từ giá trị điện áp tại chân điều khiển tần số.
3. Xây dựng các lưu đồ vận hành cho biến tần dựa vào tín hiệu các chân IO, bao gồm:
chạy thuận, chạy ngược và dừng.
4. Tổng hợp các lưu đồ con vào lưu đồ chương trình chính vận hành biến tần.
5. Mô hình hóa mô phỏng cho các thuật toán như phân tích phía trên.
6. Xây dựng mô hình biến tần dựa trên các hàm toán này với các biến số cài đặt được
thực hiện dựa trên việc nhập tay trong giao diện biến tần.
CHƯƠNG 11: TỔNG HỢP BÁO CÁO VỀ BIẾN TẦN IG5A
11.1 Kiến thức cần nắm
Kiến thức cơ bản về điện tử công suất và điều khiển bộ nghịch lưu.
Tài liệu kỹ thuật về biến tần IG5A: Cấu hình, sơ đồ chân chức năng, sơ đồ kết nối, thiết
lập các thông số điều khiển, thiết lập các chế độ vận hành.
11.2 Hỗ trợ thực hành
Video hướng dẫn cơ bản về biến tần
Video nguyên lý hoạt động của biến tần
Tài liệu kỹ thuật về IG5A
File mô hình hóa mô phỏng IG5A 11.3 Bài thực hành
11.3.1 Nhiệm vụ thực hành
Dựa trên các tài liệu được tìm hiểu trước đó, nhóm SV sẽ viết báo cáo cho biến tần
IG5A. Nội dung chính trong báo cáo bao gồm:
‒ Cấu tạo, nguyên lý hoạt động của biến tần.
‒ Thiết lập các chế độ vận hành của biến tần. (chạy thuận, chạy ngược, dừng) ‒
Cơ chế, các bước thực hiện chuyển đổi giữa các chế độ vận hành của biến tần.
‒ Xây dựng các khối chức năng trong biến tần:
Khối chuyển đổi điện áp ngõ vào điều khiển sang tần số của biến tần.
Khối giới hạn độ tăng tần số và điện áp của biến tần.
Khối chuyển đổi từ tần số biến tần sang điện áp ngõ ra biến tần.
Khối chuyển đổi qua lại giữa chế độ chạy thuận và chạy ngược.
Khối xác định góc pha điện áp ngõ ra biến tần dựa trên tần số biến tần.
Khối bộ nghịch lưu chuyển từ giá trị điện áp ngõ ra thành điện áp ngõ ra.
‒ Kiểm tra kết quả mô hình hóa mô phỏng biến tần. Các tiêu chí kiểm tra bao gồm:
Mối liên hệ giữa điện áp nhập vào và tần số biến tần.
Mối liên hệ giữa tần số biến tần và điện áp ngõ ra biến tần.
Mối liên hệ giữa tần số biến tần và tần số của điện áp ngõ ra của biến tần.
Sự thay đổi của điện áp và tần số ngõ ra biến tần khi thay đổi chế độ làm việc.
11.3.2 Một số lý thuyết liên quan
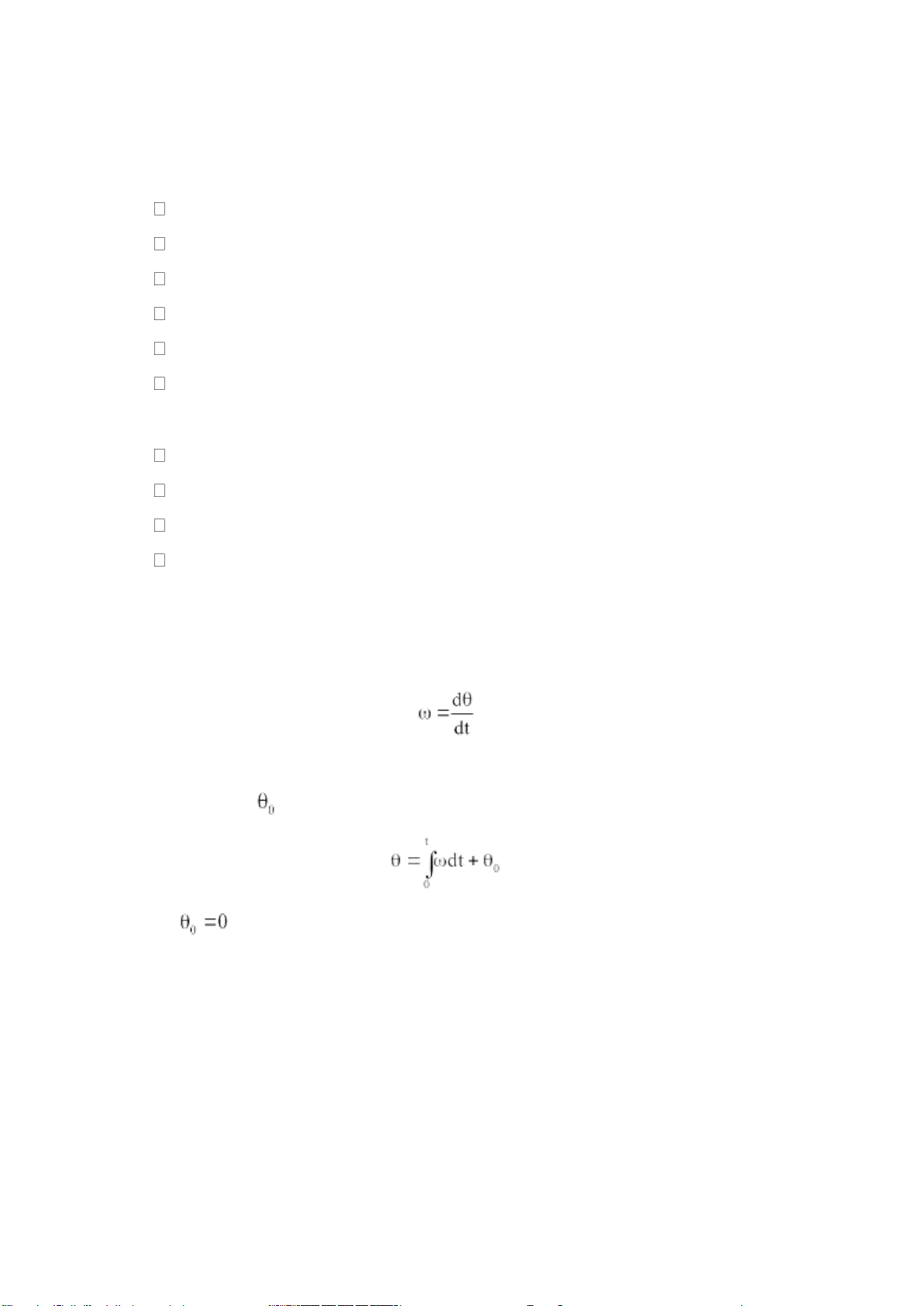
Vận tốc góc của từ trường quay (vận tốc đồng bộ) là đạo hàm của góc pha theo phương trình 23 323\* MERGEFORMAT (.)
Như vậy, vị trí góc pha của từ trường quay được xác định dựa trên vận tốc góc theo
phương trình 24 với là vị trí góc pha ban đầu. 424\* MERGEFORMAT (.) Với giả sử
, phương trình 24 được viết lại dưới dạng 25 và có mô hình hóa mô phỏng như trong Hình 11.19. 525\* MERGEFORMAT (.) Hình 11.19
CHƯƠNG 12: ĐIỀU KHIỂN DÒNG ĐIỆN QUA TẢI RL SỬ DỤNG BIẾN TẦN
613Equation Chapter (Next) Section 1
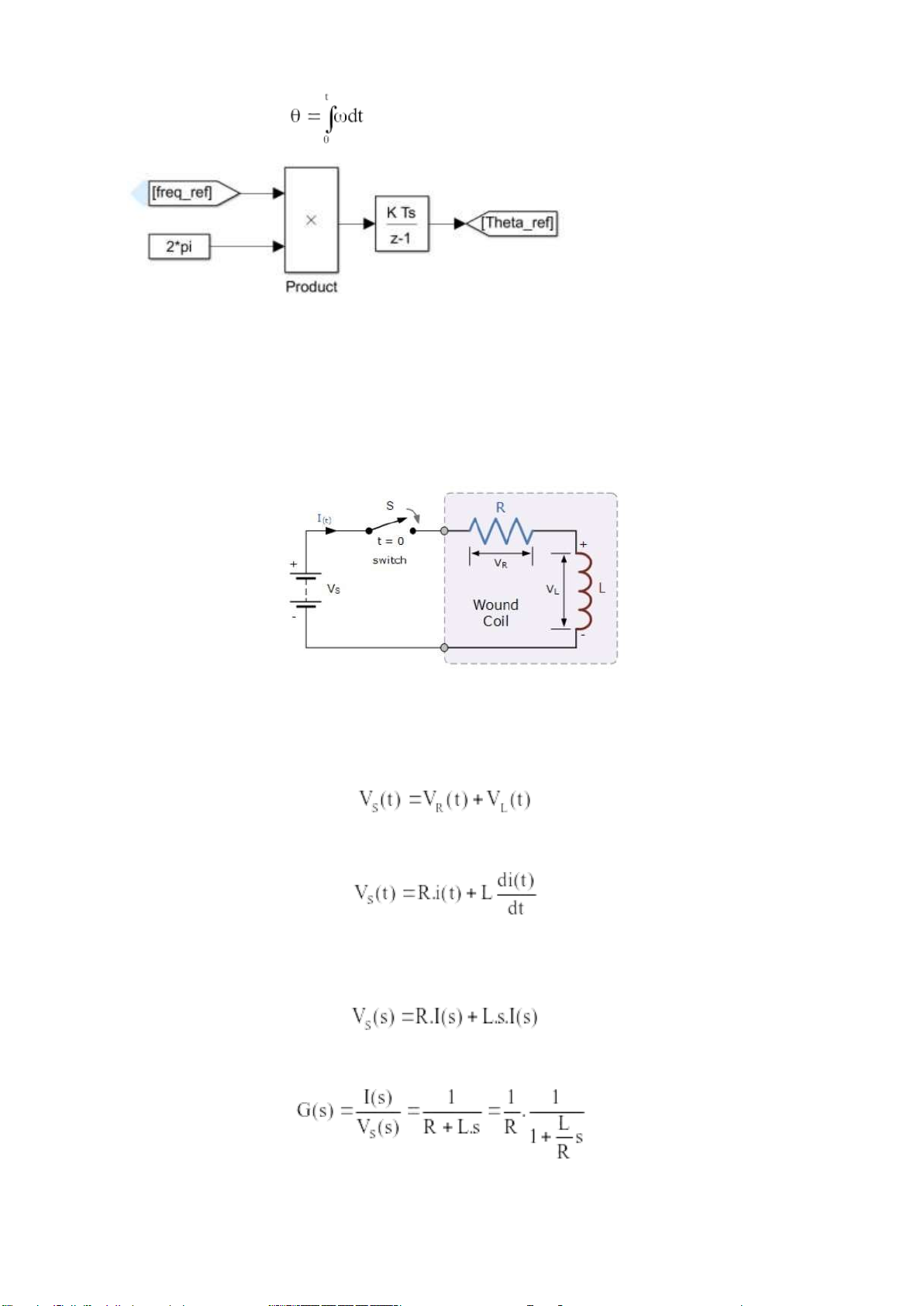
12.1 Mô hình toán của tải RL Hình 12.20 Mạch điện RL
Cho mạch điện RL như trong hình, Phương trình điện áp trong mạch điện kín được thể
hiện như trong phương trình 37. 737\* MERGEFORMAT (.)
Viết các điện áp của thành phần dưới dạng dòng điện, 37 trở thành 38 838\* MERGEFORMAT (.)
Thực hiện biến đổi laplace với điều kiện đầu bằng 0 cho phương trình 38 ta sẽ thu được kết quả như sau 939\* MERGEFORMAT (.)
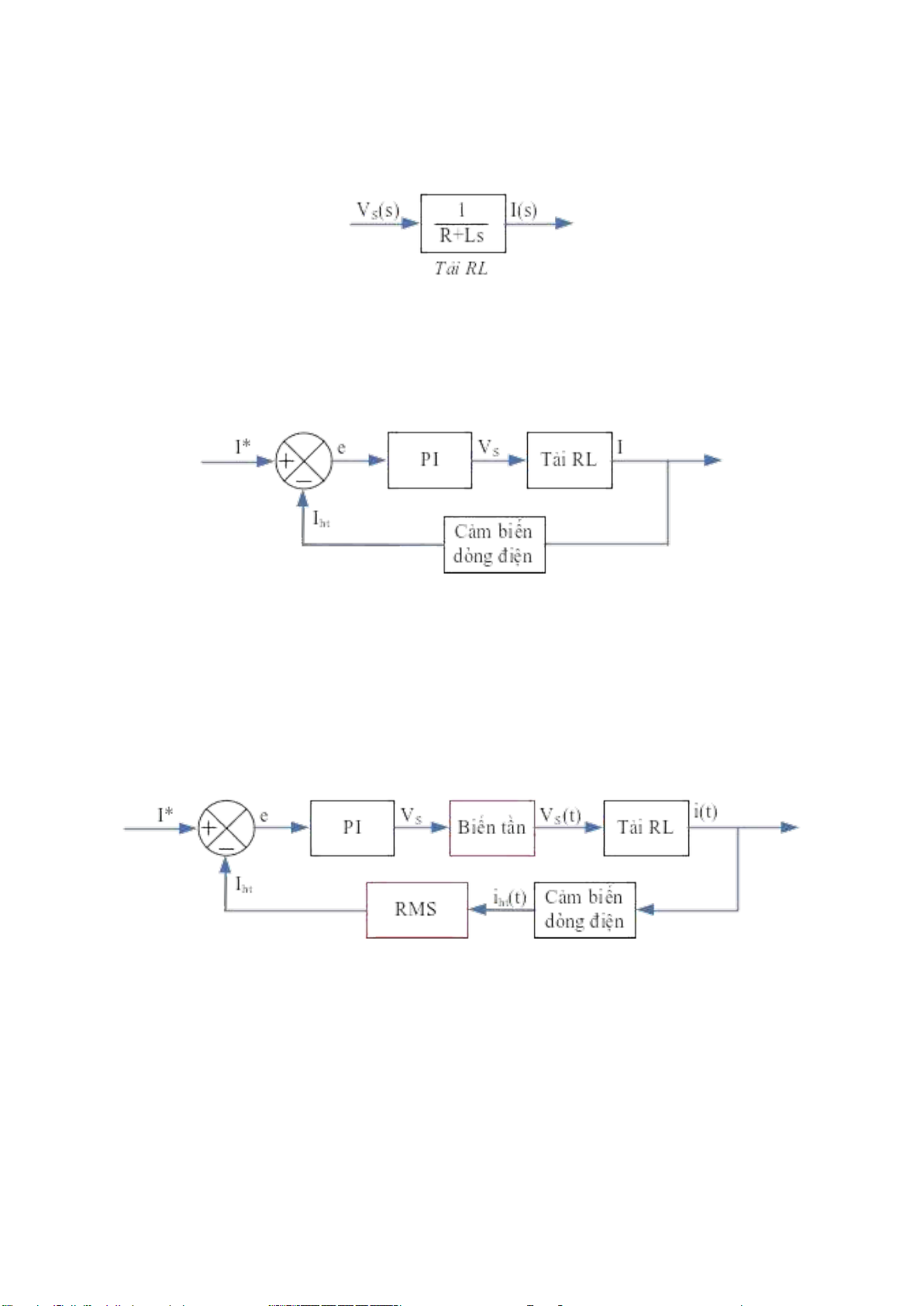
Hàm truyền của tải RL được xác định như sau: 10310\* MERGEFORMAT (.)
Như vậy, hàm truyền của tải RL với dòng điện ngõ ra được xác định dựa trên điện áp
đặt vào hai đầu RL được xác định như sau (Hình 12.21)
Hình 12.21 Hàm truyền tương đương của tải RL
12.2 Điều khiển dòng điện qua tải RL
Theo phân tích ở trên, để kiểm soát giá trị dòng điện hiệu dụng qua tải RL thì phải kiểm
soát được điện áp đặt vào hai đầu tải RL. Sơ đồ điều khiển được đề xuất như trong Hình 12.22
Hình 12.22 Sơ đồ điều khiển dòng điện qua tải RL
Sơ đồ nguyên lý điều khiển dòng điện trong Hình 12.22 là nguyên lý chung trong quá
trình điều khiển dòng điện qua tải RL. Đối với từng cấu hình phần cứng cụ thể thì sơ đồ này
đều có sự điều chỉnh theo để đảm bảo nguyên tắc điều khiển không thay đổi.
Đối với điều khiển giá trị hiệu dụng dòng điện qua tải RL, sơ đồ khối điều khiển được
thể hiện như trong Hình 12.23 Hình 12.23
12.3 Mô hình hóa mô phỏng điều khiển dòng điện qua tải RL bằng biến tần
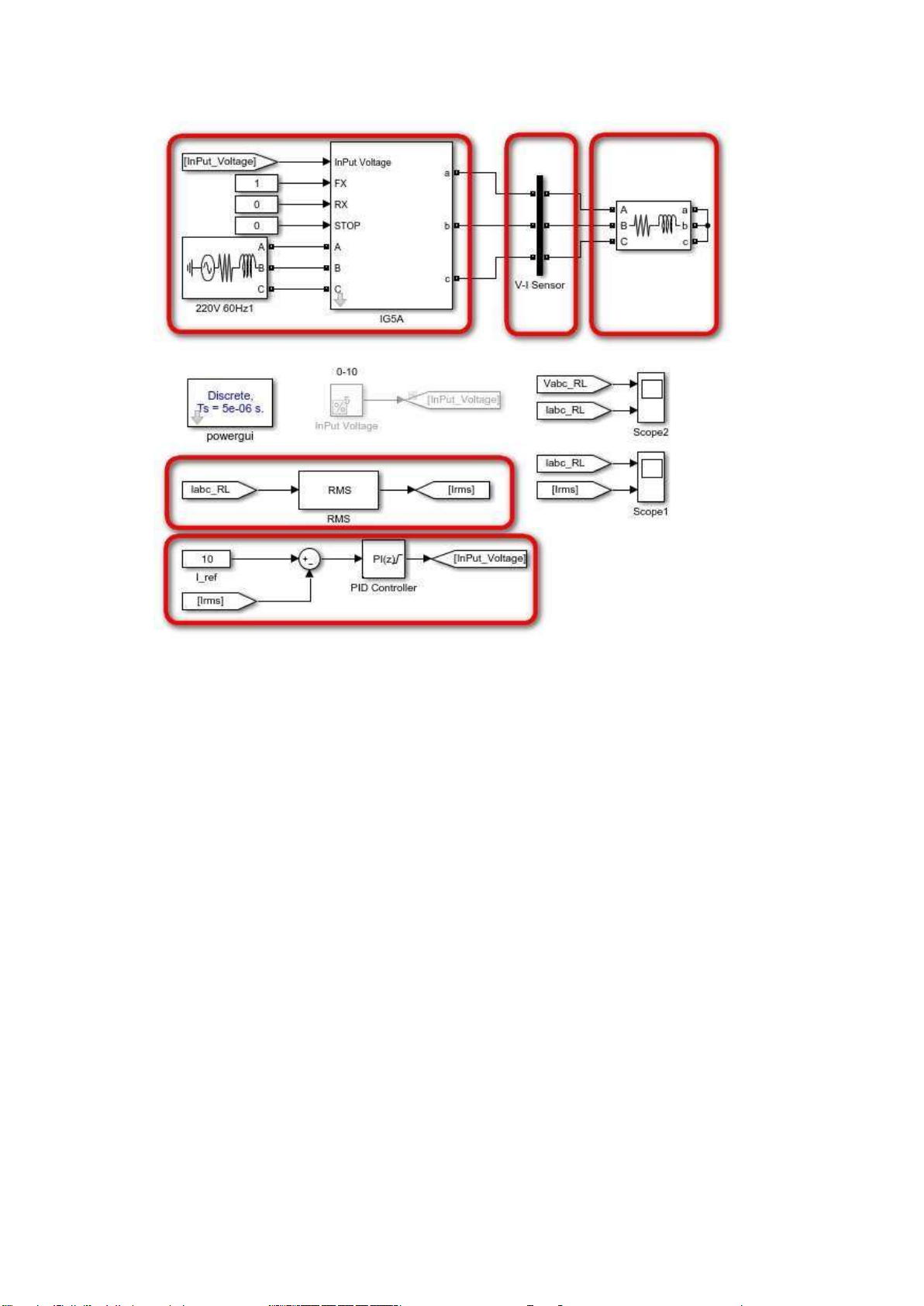
Dựa trên sơ đồ nguyên lý hoạt động được đề xuất trong Hình 12.23, mô hình hóa mô
phỏng điều khiển dòng điện qua tải RL bằng biến tần IG5A được xây dựng như trong Hình
12.24. Mô hình bao gồm 5 khối chính và được đóng khung bằng các hình chữ nhật màu đỏ
và có chức năng nhiệm vụ chính như sau:
Khối biến tần: Khối biến tần có nhiệm vụ chính là cung cấp điện áp cho các tải RL. Để
làm được điều này, khối được cấp nguồn từ lưới điện ba pha có điện áp hiệu dụng dây là
380V. điện áp đầu ra trên các pha a,b,c phụ thuộc vào giá trị điện áp ngõ vào cấp lên chận V1
của biến tần. Giá trị điện áp ngõ vào sẽ được chuyển đổi thành điện áp và tần số ngõ ra dựa
vào đường đặc tuyến V/f đã cài đặt cho biến tần trước đó.
Khối cảm biến dòng điện và điện áp: Khối cảm biến có nhiệm vụ ghi nhận dòng điện và
điện áp ngõ của bộ nghịch lưu. Khối cảm biến dòng điện sẽ được ghi nhận và chuyển sang
khối xử lý tín hiệu phía sau. Do không có yêu cầu về điều khiển điện áp hay tần số nên giá trị
điện áp không được ghi nhận và xử lý.
Khối tải RL: Khối tải RL là đối tường cần điều chỉnh điện áp hoạt động. Các giá trị RL
được nhập vào ứng với các điều kiện làm việc khác nhau. Khối có nhiệm vụ xác định giá trị
dòng điện từ điện áp ngõ vào thiết bị với thông số RL tương ứng.
Khối RMS: Khối có nhiệm vụ xác định giá trị hiệu dụng cho tín hiệu dòng điện tức thời
được ghi nhận bằng cảm biến dòng điện.
Khối điều khiển: Khối điều khiển có nhiệm vụ xác định giá trị điện áp tương ứng để
hiệu chỉnh dòng điện ngõ ra biến tần. Khối bao gồm một bộ so lệch giữa dòng điện mong
muốn và dòng điện thực tế ghi nhận được bằng cảm biến. Một khối điều khiển PI được dùng
để ước lượng giá trị điện áp cấp cho tải RL dựa trên sai số dòng điện ngõ vào.
Hình 12.24 Mô hình hóa mô phỏng điều khiển dòng điện qua RL bằng biến tần IG5A
12.4 Kết quả mô phỏng
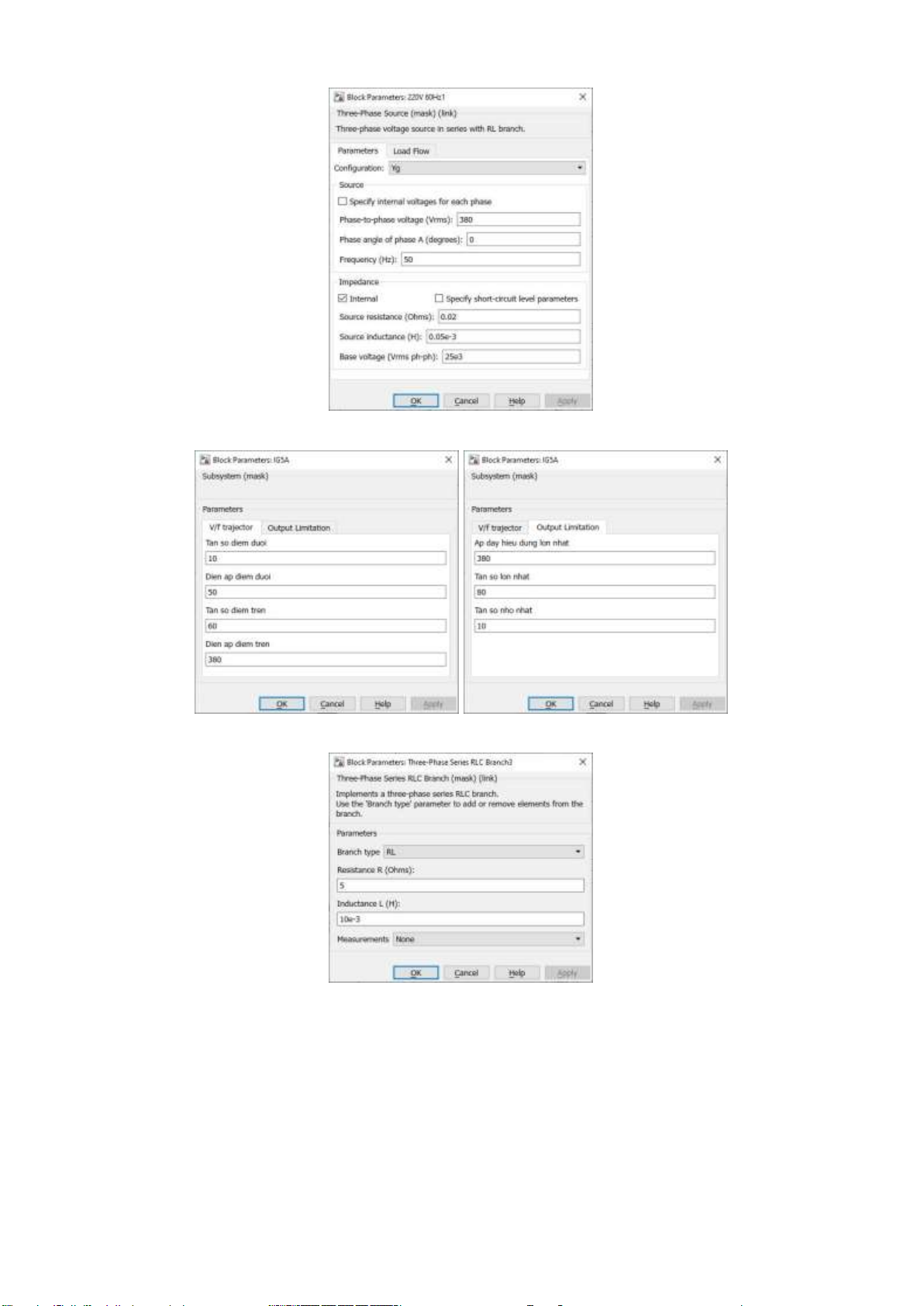
12.4.1 Thiết lập thông số mô phỏng
Dựa vào thông số đề cho ứng với mỗi trường hợp khác nhau sẽ có thông số hệ thống
khác nhau. Trong ví dụ này, các thông số mặc định dùng trong mô phỏng được xác định dựa
trên các thông tin trong các giao diện tương ứng và được thể hiện lần lượt qua Hình 12.25,
Hình 12.26, Hình 12.27 và Hình 12.28
Hình 12.25 Giao diện khối nguồn
Hình 12.26 Giao diện khối biến tần
Hình 12.27 Giao diện khối tải RL
Sau khi thực hiện mô phỏng, mốt số kết quả được ghi nhận và trình bày chi tiết như bên dưới:
Hình 12.28 Giao diện bộ điều khiển PI
12.4.2 Kết quả mô phỏng
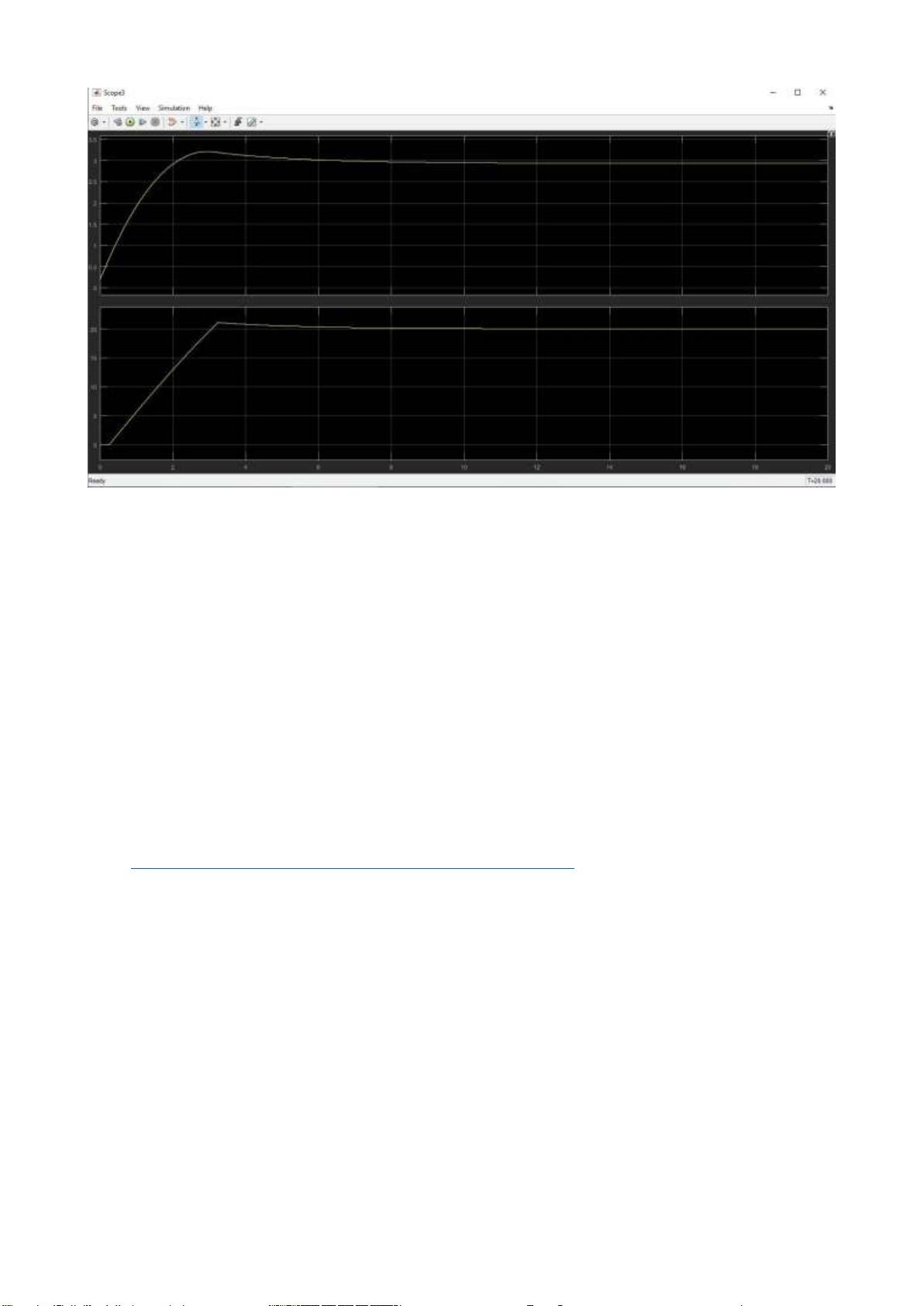
Hình 12.29 Kết quả tín hiệu điện áp cấp vào biến tần và dòng điện qua tải trường hợp dòng điện tham chiếu là 10A
Khi dòng điện tham chiếu là 10A: Khi dòng điện qua tải mong muốn đạt được tại giá trị
10A thì kết quả tín hiệu điện áp cấp vào biến tần và dòng điện hiệu dụng qua tải được thể hiện
như trong Hình 12.29. Qua kết quả nhận thấy rằng với yêu cầu có 10A hiệu dụng ngõ ra thì
điện áp cần cấp vào chân biến tần là 0.829 V. Nhận thấy sau khoảng thời gian 6s thì dòng
điện hiệu dụng được hiệu chỉnh tại mức 10A và sai số xác lập giữa giá trị mô men và giá trị
tham chiếu gần băng không.
Hình 12.30 Kết quả tín hiệu điện áp cấp vào biến tần và dòng điện qua tải trường hợp dòng điện tham chiếu là 15A
Khi dòng điện tham chiếu là 15A: Khi dòng điện qua tải mong muốn đạt được tại giá trị
15A thì kết quả tín hiệu điện áp cấp vào biến tần và dòng điện hiệu dụng qua tải được thể hiện
như trong Hình 12.30. Qua kết quả nhận thấy rằng với yêu cầu có 15A hiệu dụng ngõ ra thì
điện áp cần cấp vào chân biến tần là 1.844 V. Nhận thấy sau khoảng thời gian 4s thì dòng
điện hiệu dụng được hiệu chỉnh tại mức 15A và sai số xác lập giữa giá trị mô men và giá trị
tham chiếu gần băng không.
Hình 12.31 Kết quả tín hiệu điện áp cấp vào biến tần và dòng điện qua tải trường hợp dòng điện tham chiếu là 20A
Khi dòng điện tham chiếu là 20A: Khi dòng điện qua tải mong muốn đạt được tại giá trị
20A thì kết quả tín hiệu điện áp cấp vào biến tần và dòng điện hiệu dụng qua tải được thể hiện
như trong Hình 12.31. Qua kết quả nhận thấy rằng với yêu cầu có 20A hiệu dụng ngõ ra thì
điện áp cần cấp vào chân biến tần là 2.92 V. Nhận thấy sau khoảng thời gian 11s thì dòng
điện hiệu dụng được hiệu chỉnh tại mức 20A và sai số xác lập giữa giá trị mô men và giá trị
tham chiếu gần băng không.
12.5 Tài liệu tham khảo
File mô phỏng điều khiển dòng điện tải RL bằng IG5A 12.6 Bài thực hành
Mỗi nhóm thực hiện các công việc sau:
‒ Xây dựng mô hình toán có các tải RL với các thông số được mỗi nhóm được cho trong Bảng 12.9.
‒ Tìm hiểu cảm biến dòng điện và cho biết các nguyên tắc đo giá trị dòng điện bằng cảm biến.
‒ Đề xuất phương pháp xác định giá trị hiệu dụng của tín hiệu dòng điện đo được.
‒ Đề xuất nguyên lý điều khiển dòng điện hiệu dụng qua tải RL bằng biến tần.
‒ Mô hình hóa mô phỏng điều khiển dòng điện hiệu dụng qua tải RL bằng biến tần.
‒ Xuất và đánh giá kết quả thu được sau mô phỏng mô hình.
Bảng 12.9 Thông số tải RL Nhóm R (Ω) L (mH) 1 5 9 2 6 13 3 7 15 4 8 14 5 9 18 6 10 15 7 7 20 8 8 25 9 5 15 10 6 18
CHƯƠNG 13: ĐIỀU KHIỂN NHIỆT ĐỘ LÒ NHIỆT ĐIỆN TRỞ
1114Equation Chapter (Next) Section 1
13.1 Mô tả toán học của lò ( hàm truyền của lò)
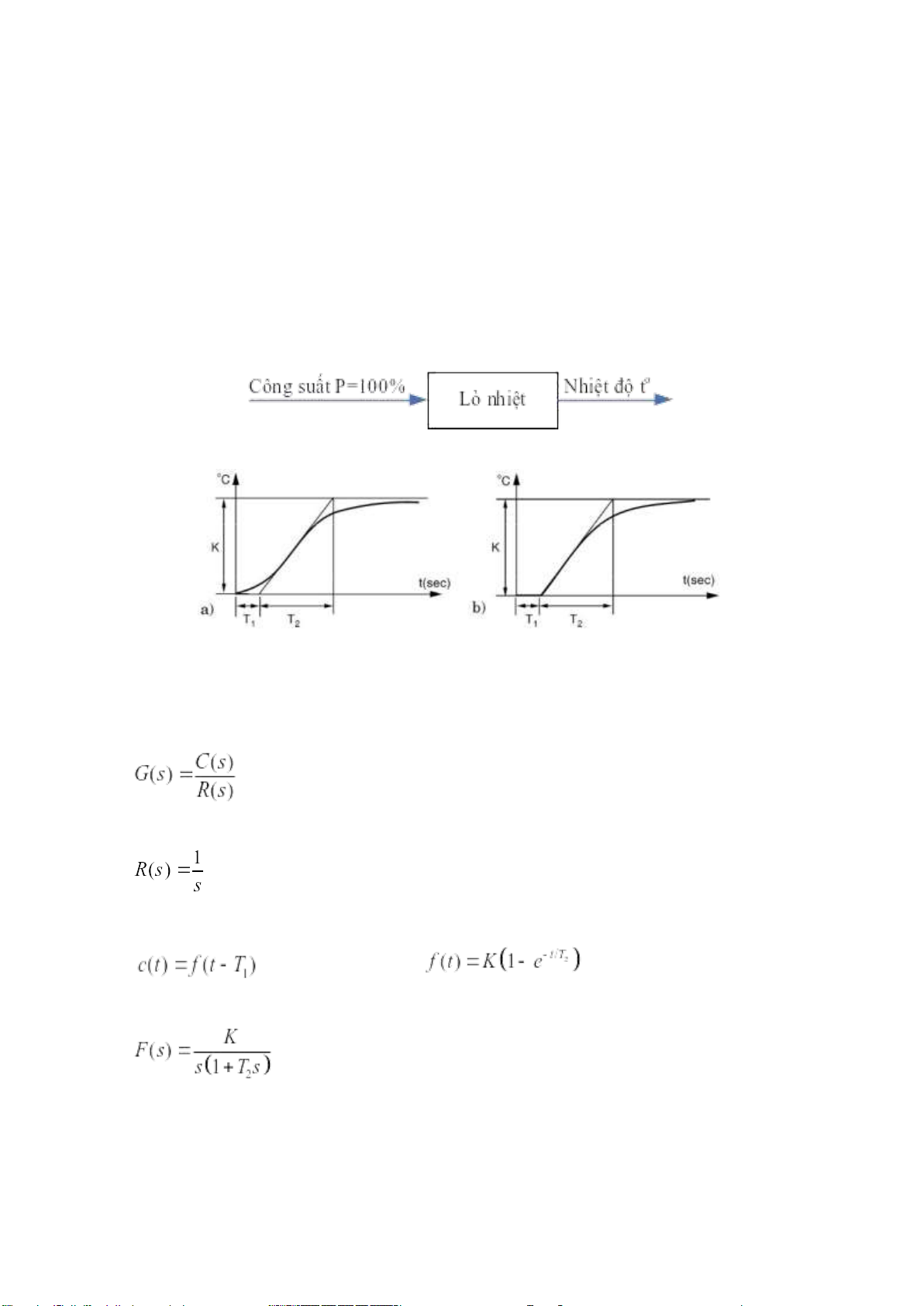
Hàm truyền của lò nhiệt được xác định bằng phương pháp thực nghiệm. Cấp nhiệt tối
đa cho lò (công suất vào P = 100%), nhiệt độ lò tăng dần (Hình 13.32). Sau một thời gian
nhiệt độ lò đạt đến giá trị bão hòa. Đặc tính nhiệt độ theo thời gian có thể biểu diễn như Hình
13.33a. Do đặc tính chính xác của lò nhiệt khá phức tạp nên ta xấp xỉ bằng đáp ứng gần đúng như ở Hình 13.33b.
Hình 13.32 Thí nghiệm xác định hàm truyền lò nhiệt
a) Đặc tính chính xác; b) Đặc tính gần đúng
Hình 13.33 Đặc tính của lò nhiệt Ta xác định hàm truyền gần
đúng của lò nhiệt dùng định nghĩa:
Do tín hiệu vào là hàm nấc đơn vị (P = 100%) nên:
Tín hiệu ra gần đúng (H.2.9b) chính là hàm: trong đó
Tra bảng biến đổi Laplace ta được:
Do vậy, áp dụng định lý chậm trễ ta được:
Suy ra hàm truyền của lò nhiệt được viết theo 412 bao gồm một khâu quán tính hệ số
khuếch đại K và hằng số thời gian T, và khâu trễ thời gian L, các thông số này có thể lấy được
khi kẻ tiếp tuyến ở điểm uốn cho đồ thị quá độ hàm nấc như hình vẽ bên. 12412\* MERGEFORMAT (.)
Hệ số khuếch đại K được tính như 413. Khi nhiệt độ ban đầu khác không, K được tính
từ độ tăng nhiệt độ đầu ra so với môi trường. 13413\* MERGEFORMAT (.)
Để áp dụng cho hệ tuyến tính, ta lấy khai triển Taylor của theo tương đương trong 414
14414\* MERGEFORMAT (.) Kết hợp
414 vào phương trình 412, hàm truyền hệ thống lò được biểu diễn gần đúng như sau: 15415\* MERGEFORMAT (.)
13.2 Mô hình toán lò điện trở trong điều khiển nhiệt độ bằng biến tần
Hình 13.34 Điện trở lò nhiệt
Một điện trở nhiệt ba pha đấu hình sao như thể hiện trong Hình 13.34. Điện trở này có công suất định mức tại điện áp
và mỗi điện trở có giá trị R.
Như vậy, mối liên hệ giữa công suất định mức, điện áp định mức và điện trở thanh điện
trở được thể hiện theo 416 16416\* MERGEFORMAT (.)
Nếu điện áp cấp cho mỗi đầu điện trở có giá trị , công suất tiêu thụ trên điện trở được tính theo 417 17417\* MERGEFORMAT (.)
Mối liên hệ giữa công suất định mức và công suất cấp cho điện trở được xác định dựa
trên các phương trình 416 và 417 như sau: 18418\* MERGEFORMAT (.)
Kết hợp 418 với hàm truyền lò nhiệt trong 415, phương trình hàm truyền lò nhiệt điều
khiển bằng biến tần được xác định như sau: 19419\* MERGEFORMAT (.)
13.3 Nguyên lý điều khiển nhiệt độ lò nhiệt điện trở sử dụng biến tần
Hình 13.35 Nguyên lý điều khiển nhiệt độ lò nhiệt sử dụng biến tần
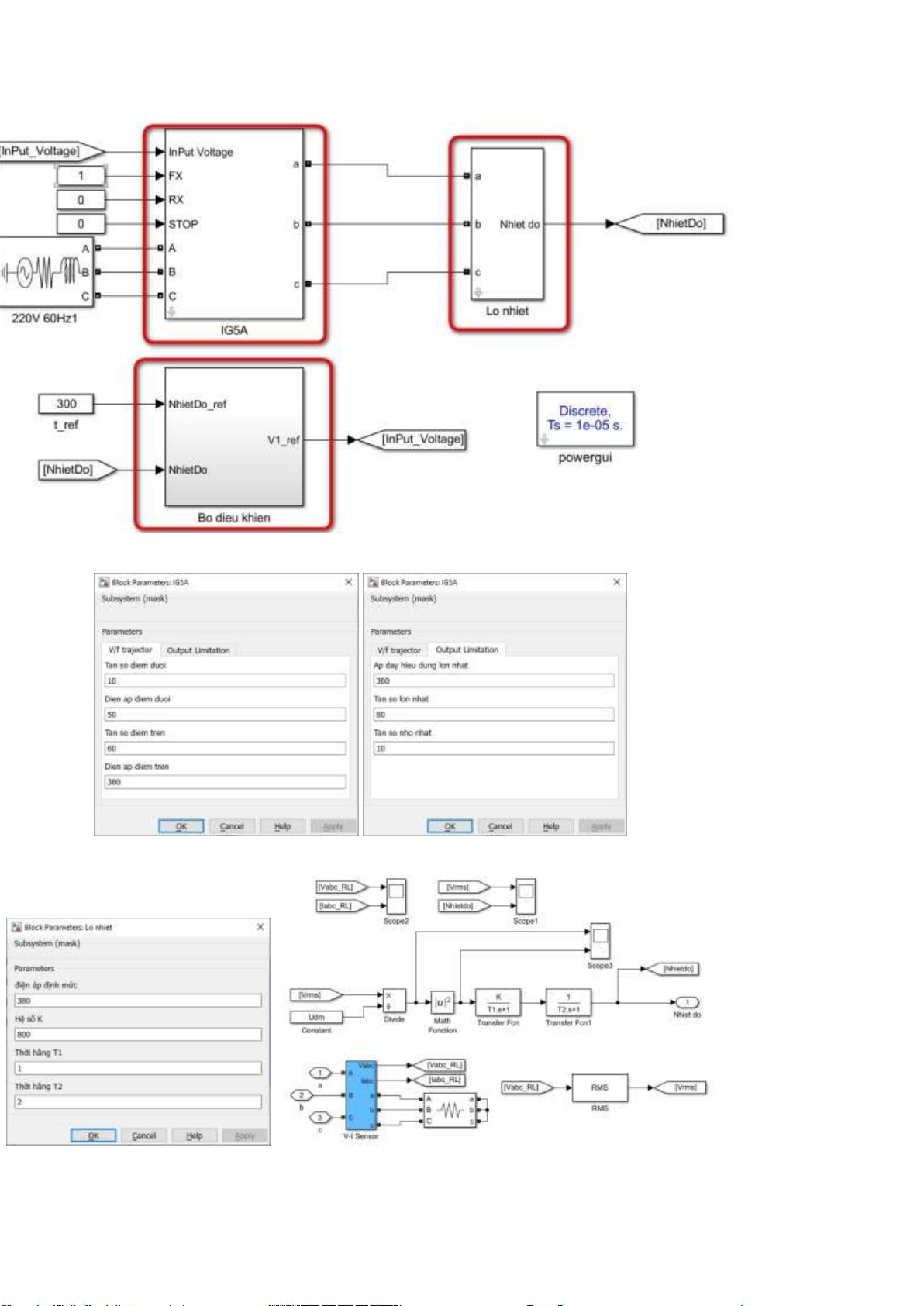
13.4 Mô hình hóa mô phỏng điều khiển nhiệt độ lò điện trở Hình 13.36
Hình 13.37 Giao diện khối biến tần
Hình 13.38 Giao diện và kết nối bên trong mô hình lò nhiệt điện trở
Hình 13.39 Giao diện và kết nối bên trong mô hình bộ điều khiển
13.5 Kết quả mô phỏng
Thực hiện các mô phỏng với các thông số mô hình được cho ứng với mỗi trường hợp
(nhóm sinh viên thực tập hoặc từng sinh viên) sẽ có các kết quả khác nhau. Dưới đây là một
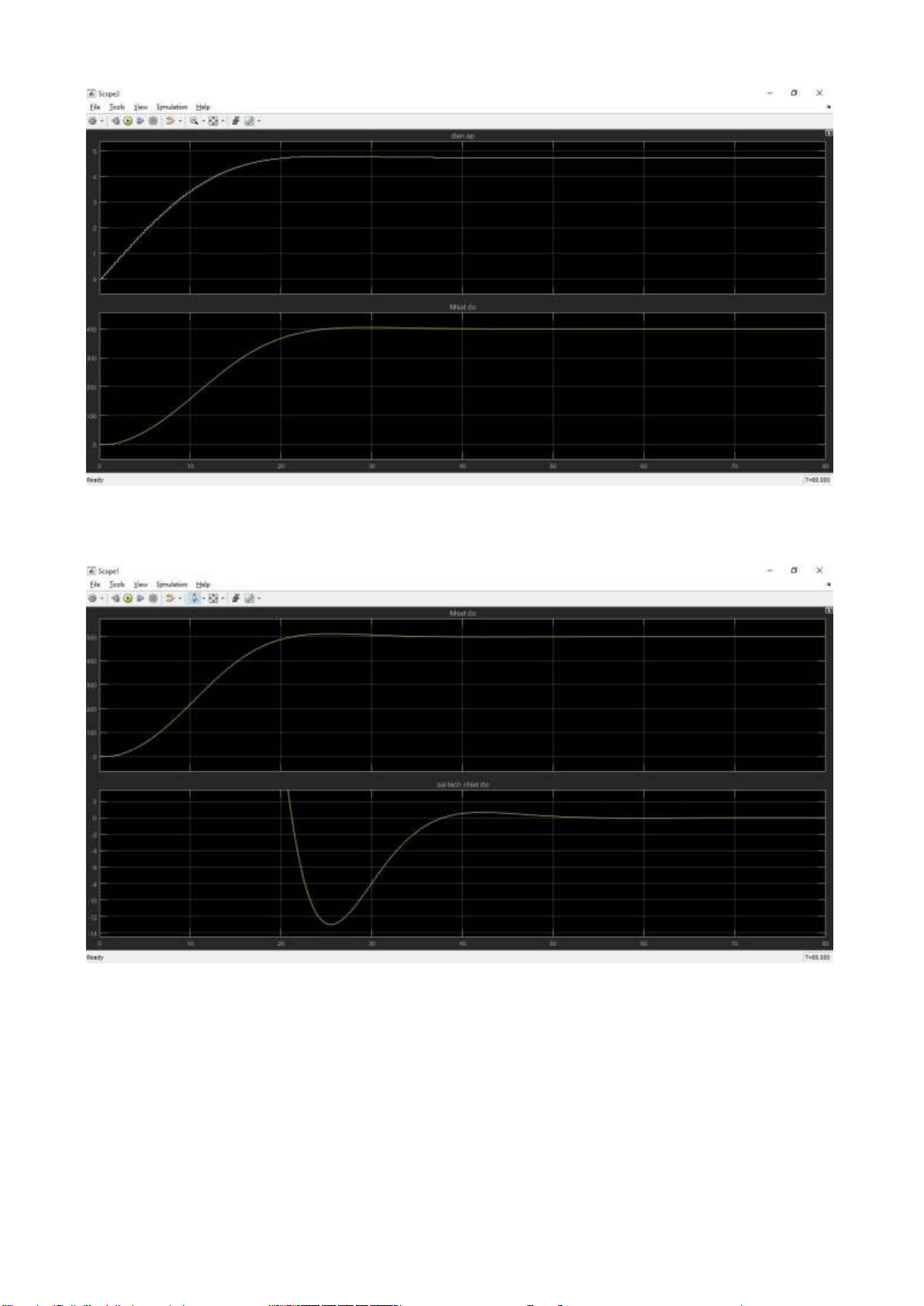
số kết quả dựa trên thông số mặc định với yêu cầu điều khiển nhiệt độ lò nhiệt tại các giá trị 300oC, 400oC và 500oC
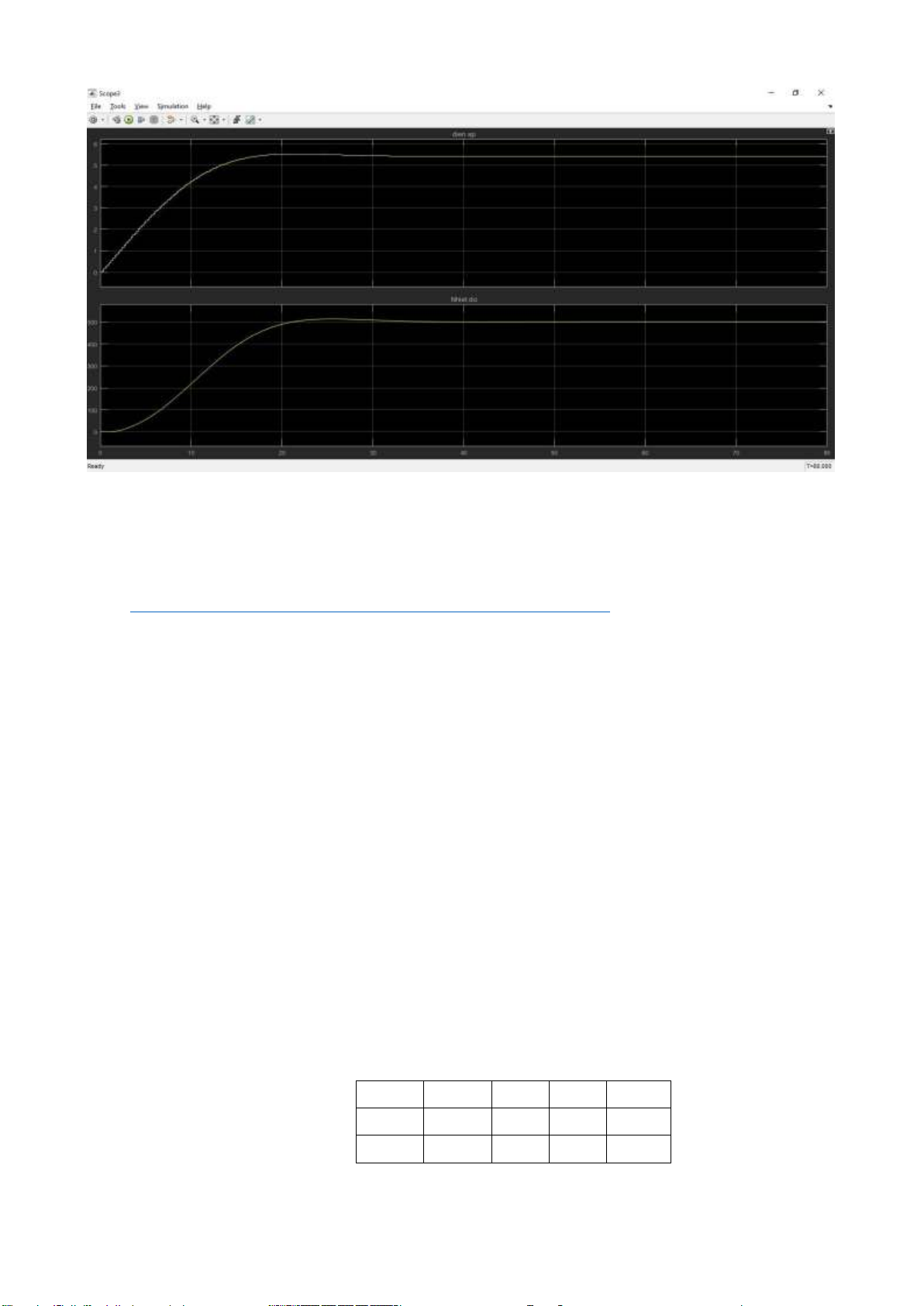
Hình 13.40 Kết quả điều khiển nhiệt độ tại nhiệt độ tham chiếu 300oC
Hình 13.41 Mối tương quan giữa nhiệt độ lò điện trở và điện áp tham chiếu cấp vào biến tần
tại nhiệt độ tham chiếu 300oC
Hình 13.42 Kết quả điều khiển nhiệt độ tại nhiệt độ tham chiếu 400oC
Hình 13.43 Mối tương quan giữa nhiệt độ lò điện trở và điện áp tham chiếu cấp vào biến tần
tại nhiệt độ tham chiếu 400oC
Hình 13.44 Kết quả điều khiển nhiệt độ tại nhiệt độ tham chiếu 500oC
Hình 13.45 Mối tương quan giữa nhiệt độ lò điện trở và điện áp tham chiếu cấp vào biến tần
tại nhiệt độ tham chiếu 500oC
13.6 Hỗ trợ thực hành
File mô phỏng điều khiển nhiệt độ lò điện trở bằng biến tần 13.7 Bài thực hành
Mỗi nhóm thực hiện các công việc sau:
‒ Xây dựng mô hình toán của lò nhiệt với các thông số được cho trong Bảng 13.10
‒ Tìm hiểu cảm biến nhiệt độ và cho biết các nguyên tắc đo giá trị nhiệt độ của một vật.
‒ Đề xuất phương pháp xác định giá trị hiệu dụng của tín hiệu điện áp đo được.
‒ Đề xuất nguyên lý điều khiển nhiệt độ lò nhiệt điện trở bằng biến tần.
‒ Mô hình hóa mô phỏng điều khiển nhiệt độ lò nhiệt điện trở bằng biến tần với nhiệt
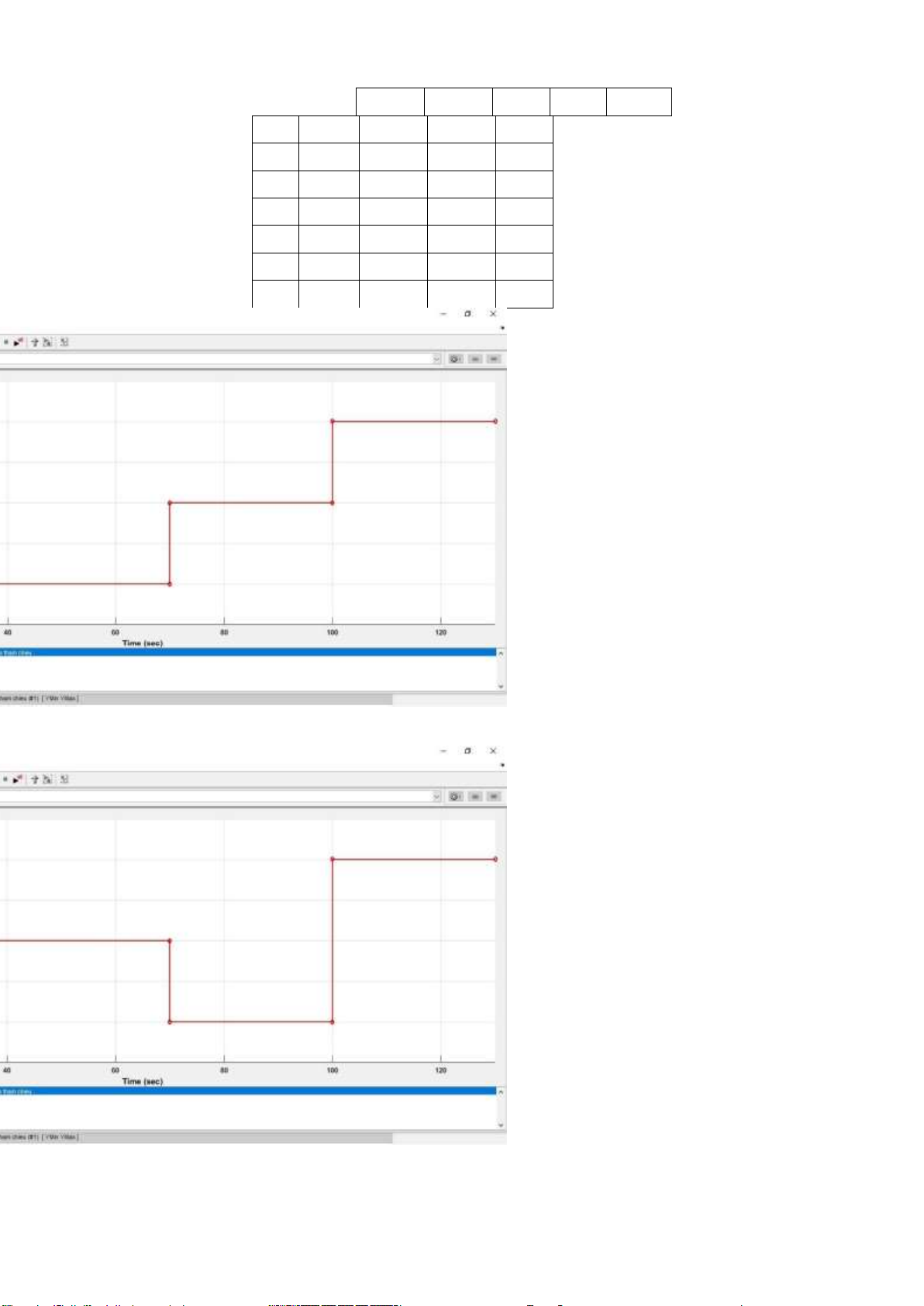
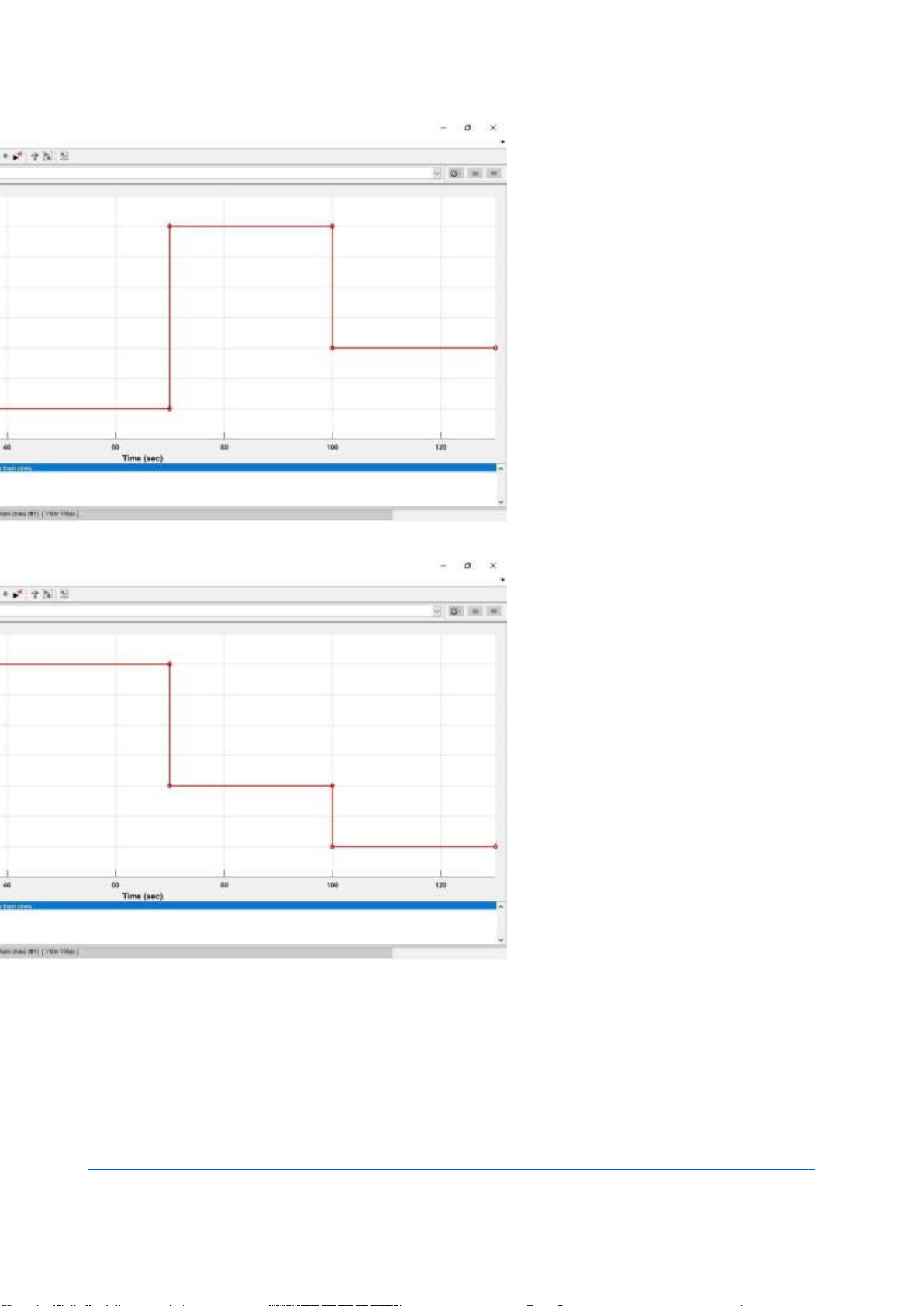
độ ngõ ra mong muốn lần lượt thể hiện trong Hình 13.46, Hình 13.47, Hình 13.48 và Hình 13.49.
‒ Xuất và đánh giá kết quả thu được sau mô phỏng mô hình.
Bảng 13.10 Thông số mô hình lò nhiệt điện trở Nhóm K T1 T2 Udm 1 1000 0.3 0.6 380 2 1000 0.5 0.8 380 3 1000 0.6 1 380 4 1000 0.3 0.5 380 5 1000 0.5 0.8 380 6 1000 0.4 0.6 380 7 1000 0.1 0.5 380 8 1000 0.6 0.8 380 9 1000 0.3 0.5 380 10 1000 0.4 0.5 380 Hình 13.46 Hình 13.47 Hình 13.48 Hình 13.49
CHƯƠNG 14: ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ BẰNG IG5A
14.1 Mô hình hóa động cơ không đồng bộ
https://www.mathworks.com/help/physmod/sps/powersys/ref/ asynchronousmachine.html
Hình 14.50 Mô hình điều khiển động cơ KĐB
Hình 14.51 Giao diện động cơ không đồng bộ
Hình 14.52 Giao diện bộ biến tần
Hình 14.53 Giao diện và kết nối bên trong của bộ điều khiển
Hình 14.54 Kết quả điều khiển tốc độ rotor
Hình 14.55 Mối tương quan giữa điện áp cấp vào chân điều khiển tần số biến tần và tốc độ động cơ
14.2 Hỗ trợ thực hành AC Motor Animation Video
Mô phỏng kỹ thuật: Hoạt động của động cơ cảm ứng 3 pha
How does an Induction Motor work
Single Phase Induction Motor, How it works
How does an Induction Motor work how it works 3 phase motor ac motor
Cách hoạt động của VFD hay bộ biến tần - Phim mô phỏng kỹ thuật
File mô phỏng điều khiển tốc độ động cơ KĐB
Lý thuyết toán của động cơ KĐB
14.3 Bài tập thực hành
Mỗi nhóm thực hiện các công việc sau:
‒ Xây dựng mô hình động cơ KĐB dựa trên thông số đề cho và tài liệu hướng dẫn.
‒ Tìm hiểu về cảm biến tốc độ: Cấu tạo, nguyên lý hoạt động và phân loại.
‒ Đề xuất loại cảm biến tốc độ dùng trong mô hình của nhóm với yêu cầu tốc độ và mô
men tải được cho trong Bảng 14.11.
‒ Đề xuất nguyên lý điều khiển tốc độ động cơ KĐB bằng biến tần.
‒ Mô hình hóa mô phỏng điều khiển tốc độ động cơ KĐB bằng biến tần với thông số
tốc độ và mô men tải được cho trong Bảng 14.11.
‒ Xuất và đánh giá kết quả thu được sau mô phỏng mô hình.
Bảng 14.11 Thông số mô hình lò nhiệt điện trở Mô men và tốc độ tham Nhóm Cấu hìhh động cơ KĐB chiếu Hình 14.56 Mô men và tốc Hình 14.58 Cấu hìhh 1 độ rotor tham chiếu 1 động cơ KĐB 1 Hình 14.57 Mô men và tốc Hình 14.59 Cấu hìhh 2 độ rotor tham chiếu 2 động cơ KĐB 2 Hình 14.56 Mô men và tốc Hình 14.60 Cấu hìhh 3 độ rotor tham chiếu 1 động cơ KĐB 3 Hình 14.57 Mô men và tốc Hình 14.61 Cấu hìhh 4 độ rotor tham chiếu 2 động cơ KĐB 4 Hình 14.56 Mô men và tốc Hình 14.62 Cấu hìhh 5 độ rotor tham chiếu 1 động cơ KĐB 5 Hình 14.57 Mô men và tốc Hình 14.63 Cấu hìhh 6 độ rotor tham chiếu 2 động cơ KĐB 6 Hình 14.56 Mô men và tốc Hình 14.59 Cấu hìhh 7 độ rotor tham chiếu 1 động cơ KĐB 2 Hình 14.57 Mô men và tốc Hình 14.58 Cấu hìhh 8 độ rotor tham chiếu 2 động cơ KĐB 1 Hình 14.56 Mô men và tốc Hình 14.61 Cấu hìhh 9 độ rotor tham chiếu 1 động cơ KĐB 4 Hình 14.57 Mô men và tốc Hình 14.60 Cấu hìhh 10 độ rotor tham chiếu 2 động cơ KĐB 3 Hình 14.56 Mô men và tốc Hình 14.63 Cấu hìhh 11 độ rotor tham chiếu 1 động cơ KĐB 6 Hình 14.57 Mô men và tốc Hình 14.62 Cấu hìhh 12 độ rotor tham chiếu 2 động cơ KĐB 5
Hình 14.56 Mô men và tốc độ rotor tham chiếu 1
Hình 14.57 Mô men và tốc độ rotor tham chiếu 2
Hình 14.58 Cấu hìhh động cơ KĐB 1
Hình 14.59 Cấu hìhh động cơ KĐB 2
Hình 14.60 Cấu hìhh động cơ KĐB 3
Hình 14.61 Cấu hìhh động cơ KĐB 4
Hình 14.62 Cấu hìhh động cơ KĐB 5
Hình 14.63 Cấu hìhh động cơ KĐB 6
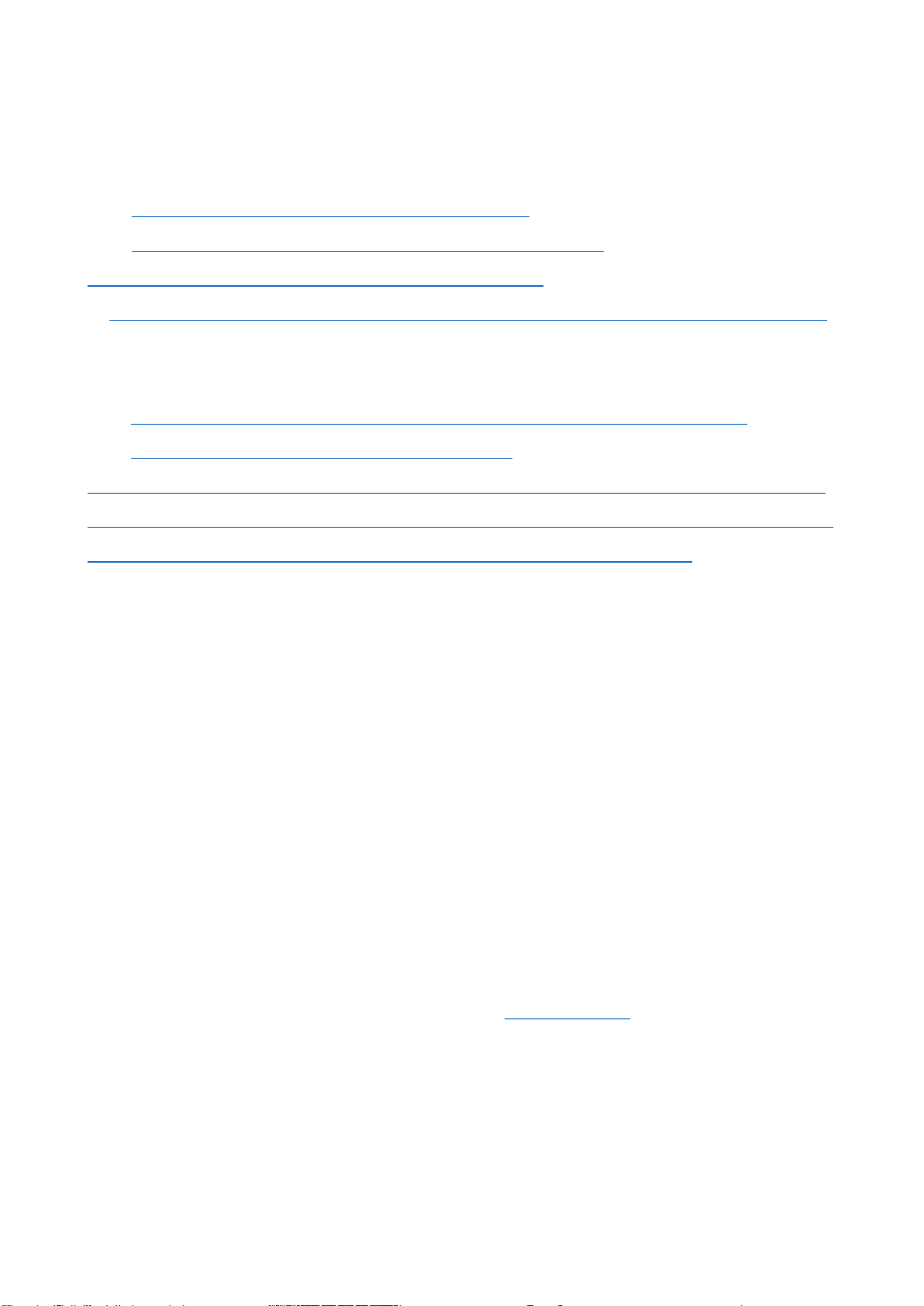
CHƯƠNG 15: THIẾT KẾ HỆ THỐNG BƠM NƯỚC
15.1 Kiến thức cần nắm Bơm ly tâm:
https://www.youtube.com/watch?v=BaEHVpKc-
1Q&ab_channel=Lesics https://www.youtube.com/watch?
v=TxqPAPg4nb4&ab_channel=TheEngineeringMindset
https://www.youtube.com/watch?v=Vhc-hEjh12I&ab_channel=MachineTechVideoBlog
Mối tương quan các đại lượng cơ điện trong bơm ly tâm:
https://www.pumpworks.com/centrifugal-pump-motor-torque-speed-curves/
https://search.abb.com/library/Download.aspx?
DocumentID=9AKK107045A5113&LanguageCode=en&DocumentPartId=&Action=Laun c h
https://www.engineeringtoolbox.com/affinity-laws-d_408.html
https://driveconstructor.com/docs/TextBook/Applications/Pump_type.html
15.1.1 Bài tập 1: Quan hệ giữa các đại lượng trong đầu bơm ly tâm
Sử dụng các tài liệu tham khảo được đề xuất, hãy xác định các phương trình toán mô tả
mối quan hệ trong đầu bơm ly tâm sau đây:
‒ Mối liên hệ giữa tốc độ bơm và lưu lượng nước
‒ Mối liên hệ giữa tốc độ bơm và áp suất đầu ống
‒ Mối liên hệ giữa tốc độ bơm và công suất cơ đầu trục máy bơm
15.1.2 Bài tập 2: Xây dựng hàm truyền đầu bơm ly tâm
Cho một hệ thống bơm nước lên bồn chứa có cấu trúc như trong Hình 15.64. Thông số
cơ bản của hệ thống này được cho như trong Bảng 15.12. Hãy thực hiện các công việc sau:
1. Đề xuất một model máy bơm nước đảm bảo yêu cầu theo Bảng 15.12. bằngthông số kỹ
thuật của các máy bơm được cho trong tài liệu “CM EN733.pdf”
2. Xác định giá trị thông số điện cơ định mức của máy bơm ứng đã chọn.
3. Sử dụng các mối liên hệ đã xác định trong phần trước, tính toán các thông sốđiện cơ tại
điểm làm việc thực tế tại chiều cao cột nước và lưu lượng nước theo yêu cầu đã cho trong Bảng 15.12.
4. Xây dựng hàm truyền thể hiện tương quan giữa tốc độ rotor (tốc độ bơm) vớimô men tải
đầu trục động cơ ứng với hệ thống bơm đã cho trong Bảng 15.12. Hình 15.64 Hình 15.65
Bảng 15.12 Thông số yêu cầu hệ thống cấp nước lên bồn Nhóm
Tổng độ cao cột nước (m) Công suất nước (m3/h) 1 25 10 2 30 10 3 35 10 4 40 10 5 45 10 6 25 20 7 30 20 8 35 20 9 40 20 10 45 20
CHƯƠNG 16: ĐIỀU KHIỂN MÁY BƠM NƯỚC
16.1 Bài tập 1: Nguyên lý điều khiển lưu lượng nước hệ thống bơm Thực hiện các nhiệm vụ sau:
1. Đề xuất và xây dựng mô hình đầu bơm nước ly tâm với đầu vào là tốc độ rotorvà
đầu ra là mô men tải đầu trục rotor, lưu lượng nước, công suất tiêu thụ của đầu bơm.
2. Đề xuất sơ đồ điều khiển lưu lượng nước đi qua ống theo giá trị xác định chotrước
bằng biến tần. Trình bày chi tiết vai trò, nhiệm vụ của từng khối chức năng.
3. Dựa trên thông tin về máy bơm nước được lựa chọn trong bài thực hành trướcđó,
hãy đề xuất biến tần (nhãn hiệu, mã sản phẩm) có thể dùng để điều khiển máy
bơm nước trên và lý giải cho lý do lựa chọn này.
4. Tìm hiểu phân loại, cấu tạo và nguyên lý hoạt động của các cảm biến lưu lượng.đề
xuất cảm biến lưu lượng trong trường hợp máy bơm đang được thiết kế.
5. Lựa chọn bộ điều khiển (VĐK, PLC) cụ thể để điều khiển lưu lượng nước
đượcbơm bởi máy bơm. Lý giải cho lý do lựa chọn này.
6. Trình bày chi tiết các kết nối giữa các thiết bị trong hệ thống bơm được đề xuất.
7. Mô hình hóa mô phỏng hệ thống bơm nước điều khiển lưu lượng bằng biến
tầntrên phần mềm Matlab/Simulink.
8. Thực hiện mô phỏng hệ thống thu được và ghi nhận các kết quả đạt được.
CHƯƠNG 17: THIẾT KẾ HỆ THỐNG ĐIỆN THANG CUỐN
17.1 Kiến thức cần nắm
Tài liệu thiết kế công suất băng tải:
https://dl.mitsubishielectric.com/dl/fa/document/manual/inv/sh060004eng/ sh060004engb.pdf
17.2 Bài tập thực hành
Cho một thang cuốn có hình dạng như Hình 17.66 và có thông số kích thước như thể
hiện trong Hình 17.67. Hãy tính toán thiết kế cho hệ thống truyền động và hệ thống điều khiển
cho thang cuốn trên với vận tốc thang cuốn là 0.5 m/s: Hình 17.66 Hình 17.67
Bảng 17.13 Thông số một số loại băng tải Đề Chiều
Góc nghiên Vận tốc
Tải trọng (người/giờ) cao thang cuốn (m/s) H (m) 1 3 25o 0.5 5000 2 3.5 25o 0.5 5000 3 4 25o 0.5 5000 4 3 30o 0.5 5000 5 3.5 30o 0.5 5000 6 4 30o 0.5 5000 7 3 35o 0.5 5000 8 3.5 35o 0.5 5000 9 4 35o 0.5 5000
Dựa vào thông số thang cuốn được yêu cầu
‒ Tính toán công suất tải trên trục của động cơ khi thang cuốn lần lượt là 0, 1000, 3000 và
5000. giả sử mỗi người có cân nặng 70Kg.
‒ Tính toán công suất động cơ và biến tần tương ứng.
‒ Lựa chọn động cơ thực tế phù hợp với yêu cầu thang cuốn. Lựa chọn dòng biến tần IG5A
để điều khiển động cơ trên. Hãy xác định mã biến tần có khả năng đáp ưng yêu cầu điều khiển trên.
CHƯƠNG 18: ĐIỀU KHIỂN TỐC ĐỘ THANG CUỐN
18.1 Bài tập thực hành
Dựa trên kết quả thu được trong bài thực hành trước, hãy thực hiện các nhiệm vụ sau:
‒ Xác định mối quan hệ giữa tốc độ rotor động cơ truyền động và mô men tải đầu trục
của động cơ trong quá trình kéo băng tải.
‒ Mô hình hóa hệ thống tải của thang cuốn
‒ Đề xuất sơ đồ nguyên lý điều khiển cho hệ thống điều khiển tốc độ cho thang cuốn.
‒ Đề xuất kết nối thiết bị cho hệ thống truyền động thang cuốn.
‒ Mô hình hóa mô phỏng hệ thống truyền động thang cuốn
‒ Ghi nhận kết quả điều khiển tốc độ thang cuốn khi số lượng người lên thang cuốn có
sự thay đổi. Giả thuyết MỤC LỤC CHƯƠNG 1:
GIỚI THIỆU MATLAB/SIMULINK...........................................................1 1.1
Kiến thức cần nắm.....................................................................................................2 1.2
Hỗ trợ thực hành........................................................................................................2 1.3
Bài thực hành 01........................................................................................................2 CHƯƠNG 2:
XÂY DỰNG HÀM TRUYỀN VÀ MÔ HÌNH HÓA MÔ PHỎNG TRÊN
MATLAB/SIMULINK.................................................................................4 2.1
Kiến thức cần nắm.....................................................................................................4 2.2
Hỗ trợ thực hành........................................................................................................4 2.3
Các file hỗ trợ mô phỏng trên MATLAB..................................................................4 2.4
Bài thực hành 02........................................................................................................4 CHƯƠNG 3:
ĐẠI SỐ HÀM TRUYỀN CHO HTĐKTĐ MỘT VÒNG.............................9 3.1
Kiến thức cần nắm.....................................................................................................9 3.2
Hỗ trợ thực hành........................................................................................................9 3.3
Bài thực hành 03........................................................................................................9 CHƯƠNG 4:
ĐẠI SỐ HÀM TRUYỀN CHO HTĐKTĐ PHỨC TẠP NHIỀU VÒNG...13 4.1
Kiến thức cần nắm...................................................................................................13 4.2
Hỗ trợ thực hành......................................................................................................13 4.3
Bài thực hành 04......................................................................................................13 CHƯƠNG 5:
ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU CHUẨN ỔN ĐỊNH ĐẠI
SỐ ROUTH................................................................................................17 5.1
Kiến thức cần nắm...................................................................................................17 5.2
Hỗ trợ thực hành......................................................................................................17 5.3
Bài thực hành 05......................................................................................................17 CHƯƠNG 6:
ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU CHUẨN ỔN ĐỊNH ĐẠI
SỐ HURWITZ............................................................................................19 6.1
Kiến thức cần nắm...................................................................................................19 6.2
Hỗ trợ thực hành......................................................................................................19
6.3 Bài thực hành 06......................................................................................................19 CHƯƠNG 7:
ĐÁNH GIÁ ỔN ĐỊNH HTĐKTĐ THEO TIÊU CHUẨN ỔN ĐỊNH TẦN
SỐ BODE...................................................................................................21 7.1
Kiến thức cần nắm...................................................................................................21 7.2
Hỗ trợ thực hành......................................................................................................21 7.3
Bài thực hành 07......................................................................................................21 CHƯƠNG 8:
BÁO CÁO THỰC HÀNH PHẦN HTĐKTĐ.............................................24 8.1
Nội dung thực hiện:.................................................................................................24 CHƯƠNG 9:
TÌM HIỂU BIẾN TẦN IG5A.....................................................................25 9.1
Kiến thức cần nắm...................................................................................................25 9.2
Hỗ trợ thực hành......................................................................................................25 9.3
Bài thực hành 09: Tìm hiểu biến tần IG5A..............................................................25
CHƯƠNG 10: XÂY DỰNG MÔ HÌNH HÓA MÔ PHỎNG BIẾN TẦN IG5A................26
10.1 Kiến thức cần nắm...................................................................................................26
10.2 Hỗ trợ thực hành......................................................................................................26
10.3 Bài thực hành...........................................................................................................26
CHƯƠNG 11: TỔNG HỢP BÁO CÁO VỀ BIẾN TẦN IG5A..........................................27
11.1 Kiến thức cần nắm...................................................................................................27
11.2 Hỗ trợ thực hành......................................................................................................27
11.3 Bài thực hành...........................................................................................................27
CHƯƠNG 12: ĐIỀU KHIỂN DÒNG ĐIỆN QUA TẢI RL SỬ DỤNG BIẾN TẦN.........29
12.1 Mô hình toán của tải RL..........................................................................................29
12.2 Điều khiển dòng điện qua tải RL.............................................................................29
12.3 Mô hình hóa mô phỏng điều khiển dòng điện qua tải RL bằng biến tần..................30
12.4 Kết quả mô phỏng...................................................................................................31
12.5 Tài liệu tham khảo...................................................................................................35
12.6 Bài thực hành...........................................................................................................35
CHƯƠNG 13: ĐIỀU KHIỂN NHIỆT ĐỘ LÒ NHIỆT ĐIỆN TRỞ...................................37
13.1 Mô tả toán học của lò ( hàm truyền của lò)..............................................................37
13.2 Mô hình toán lò điện trở trong điều khiển nhiệt độ bằng biến tần...........................38
13.3 Nguyên lý điều khiển nhiệt độ lò nhiệt điện trở sử dụng biến tần............................39
13.4 Mô hình hóa mô phỏng điều khiển nhiệt độ lò điện trở...........................................39
13.5 Kết quả mô phỏng...................................................................................................41
13.6 Hỗ trợ thực hành......................................................................................................44
13.7 Bài thực hành...........................................................................................................44
CHƯƠNG 14: ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ KHÔNG ĐỒNG BỘ BẰNG IG5A...47
14.1 Mô hình hóa động cơ không đồng bộ......................................................................47
14.2 Hỗ trợ thực hành......................................................................................................49
14.3 Bài tập thực hành.....................................................................................................49
CHƯƠNG 15: THIẾT KẾ HỆ THỐNG BƠM NƯỚC......................................................54
15.1 Kiến thức cần nắm...................................................................................................54
CHƯƠNG 16: ĐIỀU KHIỂN MÁY BƠM NƯỚC.............................................................56
16.1 Bài tập 1: Nguyên lý điều khiển lưu lượng nước hệ thống bơm..............................56
CHƯƠNG 17: THIẾT KẾ HỆ THỐNG ĐIỆN THANG CUỐN........................................57
17.1 Kiến thức cần nắm...................................................................................................57
17.2 Bài tập thực hành.....................................................................................................57
CHƯƠNG 18: ĐIỀU KHIỂN TỐC ĐỘ THANG CUỐN...................................................59
18.1 Bài tập thực hành.....................................................................................................59
MỤC LỤC............................................................................................................................60
Tài liệu liên quan:
-

BÁO CÁO THỰC HÀNH MÔN CNKT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
62 31 -

Trắc nghiệm 1, 2, 4, 5 - Điều khiển tự động và Hàm truyền | Môn Tự động điều khiển - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
157 79 -

Báo cáo thực tập hệ thống điều khiển tự động Bài số 1. Ứng dụng Matlab trong mô tả toán học hệ thống | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
633 317 -

Báo cáo 5 bài thí nghiệm thực tập môn tự động điều khiển | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
352 176 -

Báo cáo đồ án môn học hệ thống điều khiển tự động - Đề tài: Điều khiển PID số cho hệ bồn nước đơn | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
1.5 K 743