Đề tài tiểu luận robotics | Trường Đại học Kinh tế Thành phố Hồ Chí Minh
Thuật ngữ "Robot" xuất phát từ tiếng CH Séc (Czech) "Robota" có nghĩa là công việc tạp dịch trong vở kịch Rossum's Universal Robots của Karel Capek, vào năm 1921. Trong vở kịch nây, Rossum và con trai của ông ta đã chế tạo ra những chiếc máy gân giống với con người.Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem !
Môn: Quản trị chuỗi cung ứng 12 tài liệu
Trường: Đại học Kinh tế Thành phố Hồ Chí Minh 2.2 K tài liệu
Tác giả:









Preview text:
lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI TRƯỜ Ạ ỌNG Đ I H C BÁCH KHOA HÀ NỘI
-----*-----*-----*-----
VIỆ ƠN C KHÍ
ĐƠN V CHUYÊN MÔN: VIỊ ỆN CƠ KHÍ
ĐỀỀ TÀI TIỂ ẬU LUN: ROBOTICS - PGS. PHAN BÙI KHÔI
MÃ HỌC PHẦẦN: ME 3168
MÃ ĐỀẦ: 3168_3
H c kì: II _ Năm h c: 2012 – 2013.ọ ọ
Sinh viên th c hi n: Lê Tuấấn Anh.ự ệ MSSV: 20109859.
L p CN-C Đi n T 1- K55.ớ ơ ệ ử
Hà n i, tháng 5 năm 2013.ộ
Page | 1 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
LỜI NÓI ĐẦUỀ
Trong s nghi p công nghi p hóa, hi n đ i hóa đấất nự ệ ệ ệ ạ ước vấấn đêề t đ ng
hóa ự ộ có vai trò đ c bi t quan tr ng. ặ ệ ọ
Nhăềm nấng cao nấng suấất dấy chuyêền công ngh , nấng cao chấất lệ ượng và kh
năng c nh tranh c a s n ph m, c i thi n điêều ki n lao đ ng, nấng cao năng ả ạ ủ ả ẩ ả ệ ệ
ộ suấất lao đ ng. đ t ra là h thôấng s n xuấất ph i có tính linh ho t cao.Robot công ộ ặ ệ
ả ả ạ nghi p, đ c bi t là nh ng tay máy robot là bô ph n quan tr ng đ t o ra nh ng h ệ ặ ệ
ữ ậ ọ ể ạ ữ ệ thôấng đó.
Tay máy Robot đã có m t trong s n xuấất t nhiêều năm trặ ả ừ ước, ngày nay tay máy
Robot đã dùng nhiêều lĩnh v c s n xuấất, xuấất phát t nh ng u đi m mà tay ở ự ả ừ ữ ư
ể máy Robot đó và đúc kêất l i trong quá trình s n xuấất làm vi c, tay máy có nh ng ạ ả
ệ ữ tính năng mà con người không th có để ược, kh năng làm vi c n đả ệ ổ ịnh, có th
làm ể vi c trong môi trệ ường đ c h i…..Do đó vi c đấều t nghiêc c u, chêấ t o ra nh ng ộ
ạ ệ ư ứ ạ ữ lo i tay máy Robot ph c v cho công cu c t đ ng hóa s n xuấất lạ ụ ụ ộ ự ộ ả à
rấtấ cấền thiêất cho hi n t i và tệ ạ ương lai.
Môn h c ROBOTICS giúp chúng em bọ ước đấều làm quen v i nh ng vấấn đêề côất lõi và ớ
ữ c b n nhấất vêề robot và rấất có ích cho chúng em sau này. Qua đó
chúng em có th tìm ơ ả
ể hi u sấu h n cũng nh t o tiêền đêề giúp chúng em có th hoàn thành để ơ ư ạ ể
ược nh ng ữ môn h c tiêấp theo.ọ
Trong quá trình h c môn ROBOTICS có rấất nhiêều vấấn đêề còn thiêất sót, em rấất
mong ọ được thấềy ch b o và hỉ ả ướng dấẫn thêm.
Em xin chấn thành c m n ! ả ơ
Sinh viên th c hi n: ự ệ Lê Tuấấn Anh
Page | 2 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI MỤ ỤC L C
LỜI NÓI ĐẦẦU .. …………………………………………………………….
NỘI DUNG …………………………………………………………………
CHƯƠNG I. TỔNG QUAN VÊẦ ROBOT: 1.1.
SƠ LƯỢT QUÁ TRÌNH PHÁT TRIỂN CỦA ROBOT:
1.2. ỨNG DỤNG CỦA ROBOT TRONG CÔNG NGHIỆP VÀ SẢN XUẦẤT: 1.3.
CÁC KHÁI NIỆM VÀ Đ NH NGHĨA VÊẦ ROBOT:Ị 1.4.
CẦẤU TRUC CHUNG CỦA ROBOT: 1.5.
PHẦN LOẠI ROBOT:
CHƯƠNG II: THIÊẤT KÊẤ CƠ CẦẤU ROBOT:
2.1. XẦY DỰNG CẦẤU TRÚC, THIÊTẤ LẬP HỆ PHƯƠNG TRÌNH ĐỘNG HỌC CỦA ROBOT:
2.2. GIẢI BÀI TOÁN ĐỘNG HỌC.
2.3. TÍNH TOÁN TĨNH HỌC.
2.4 TÍNH TOÁN ĐỘNG LỰC HỌC.
2.5 ĐIÊẦU KHIỂN VÀ MÔ PHỎNG.
CHƯƠNG III. KÊTẤ LUẬN & ĐÁNH GIÁ QUÁ TRÌNH:
CHƯƠNG IV. MỘT SÔẤ CẦẤU TRÚC ROBOT THAM KHẢO:
CHƯƠNG V. TÀI LIỆU THAM KHẢO:
CHƯƠNG I: GIỚ Ệ ỔI THI U T NG QUAN VỀẦ ROBOT
1.1. SƠ ƯỢ L C QUÁ TRÌNH PHÁT TRIỂN CỦA ROBOT .
Page | 3 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
Thu t ngậ ữ “Robot” xuấất phát từ tiêấng CH Séc (Czech) “Robota” có nghĩa là
công vi c t p d ch trong v k ch Rossum’s Universal Robots c a Karel Capek, vàoệ ạ ị ở
ị ủ năm 1921. Trong v k ch nấềy, Rossum và con trai c a ông ta đã chêấ t o ra nh
ngở ị ủ ạ ữ chiêấc máy gấền giôấng v i con ngớ ười đ ph c vể ụ ụ con người. Có leẫ
đó là m t g i ýộ ợ ban đấều cho các nhà sáng chêấ kyẫ thu t vêề nh ng c cấấu, máy
móc băất chậ ữ ơ ước các ho t đ ng c băấp c a con ngạ ộ ơ ủ ười.
Đấều th p kậ ỷ 60, công ty Myẫ AMF (American Machine and Foundry
Company) qu ng cáo m t lo i máy t đ ng v n năng và g i là “Ngả ộ ạ ự ộ ạ ọ ười máy
công nghi p” (Industrial Robot). Ngày nay ngệ ười ta đ t tên ngặ ười máy công nghi
pệ (hay robot công nghi p) cho nh ng lo i thiêất b có dáng dấấp và m t vài ch cệ ữ
ạ ị ộ ứ năng như tay người được điêều khi n tể ự ộ đ ng đ th c hi n m t sôấ thao tác
s nể ự ệ ộ ả xuấất.
Vêề m t kyẫ thu t, nh ng robot công nghi p ngày nay, có nguôền gôấc t haiặ
ậ ữ ệ ừ lĩnh v c kyẫ thu t ra đ i s m h n đó là các cự ậ ờ ớ ơ ơ cấấu điêều khi n tể ừ
xa (Teleoperators) và các máy công cụ điêều khi n sôấ (NC - Numerically
Controlledể machine tool).
Các c cấấu điêều khi n tơ ể ừ xa (hay các thiêất b ki u ch -t ) đã phát tri nị
ể ủ ớ ể m nh trong chiêấn tranh thêấ gi i lấền th hai nhăềm nghiên c u các v t li u
phóngạ ớ ứ ứ ậ ệ x . Ngạ ười thao tác được tách bi t kh i khu v c phóng x b i m t bệ
ỏ ự ạ ở ộ ức tường có m t ho c vài c a quan sát đ có th nhìn thấấy độ ặ ử ể ể ược
công vi c bên trong. Các cệ ơ cấấu điêều khi n tể ừ xa thay thêấ cho cánh tay c a
ngủ ười thao tác; nó gôềm có m tộ b k p bên trong (t ) và hai tay cấềm bên ngoài
(ch ). C hai, tay cấềm và bộ ẹ ở ớ ở ủ ả ộ k p, đẹ ược nôấi v i nhau băềng m t c cấuấ
sáu b c tớ ộ ơ ậ ự do để ạ t o ra các v trí vàị hướng tuỳ ý c a Tay cấmềủ và bộ ẹ k p.
C cấuấ dùng đơ ể điêều khiển b k p theoộ ẹ chuy n đ ng c a tay cấềm.ể ộ ủ
Vào kho ng năm 1949, các máy công cả ụ điêều khi n sôấ ra để ời, nhăềm
đáp ứng yêu cấều gia công các chi tiêất trong ngành chêấ t o máy bay. Nh ng robot
đấềuạ ữ tiên th c chấất là s nôấi kêất gi a các khấu c khí c a c cấấu điêều khi n t xa
v iự ự ữ ơ ủ ơ ể ừ ớ kh năng l p trình c a máy công c điêều khi n sôấ.ả ậ ủ ụ ể
Dưới đấy chúng ta seẫ đi m qua m t sôấ th i đi m l ch sể ộ ờ ể ị ử phát tri n
c aể ủ người máy công nghi p. M t trong nh ng robot công nghi p đấều tiên đệ ộ ữ
ệ ược chêấ t o là robot Versatran c a công ty AMF, Myẫ. Cũng vào kho ng th i gian
nấềy Myẫạ ủ ả ờ ở xuấất hi n lo i robot Unimate 1900 đệ ạ ư ược dùng đấều tiên
trong kyẫ ngh ôtô.ệ
Tiêấp theo Myẫ, các nước khác băất đấều s n xuấất robot công nghi p: Anhả ệ
Page | 4 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
1967, Th y Đi n và Nh t 1968 theo b n quyêền c a Myẫ; CHLB Đ c -1971; Pháp ụ ể ậ
ả ủ ứ 1972; Ý - 1973. . .ở
Tính năng làm vi c c a robot ngày càng đệ ủ ược nấng cao, nhấất là khả
năng nh n biêất và x lý. Năm 1967 trậ ử ở ường Đ i h c t ng h p Stanford (Myẫ) đãạ
ọ ổ ợ chêấ t o ra mấẫu robot ho t đ ng theo mô hình “măất-tay”, có kh năng nh n
biêấtạ ạ ộ ả ậ và đ nh hị ướng bàn k p theo v trí v t k p nh các c m biêấn. Năm 1974
Công tyẹ ị ậ ẹ ờ ả Myẫ Cincinnati đ a ra lo i robot đư ạ ược điêều khi n băềng máy
vi tính, g i là robotể ọ T3 (The Tomorrow Tool: Công cụ ủ c a tương lai). Robot nấềy
có thể nấng được v t có khôấi lậ ượng đêấn 40 KG.
Có th nói, Robot là sể ự ổ ợ t h p kh năng ho t đ ng linh ho t c a các cả ạ ộ ạ
ủ ơ cấấu điêều khi n tể ừ xa v i m c đ “tri th c” ngày càng phong phú c a h thôấngớ
ứ ộ ứ ủ ệ điêều khi n theo chể ương trình sôấ cũng như kyẫ thu t chêấ t o các bậ ạ
ộ ả c m biêấn, công ngh l p trình và các phát tri n c a trí khôn nhấn t o, h chuyên
gia…ệ ậ ể ủ ạ ệ
Trong nh ng năm sau nấềy, vi c nấng cao tính năng ho t đ ng c a robotữ ệ ạ
ộ ủ không ng ng phát tri n. Các robot đừ ể ược trang b thêm các lo i c m biêấn khácị
ạ ả nhau để nh n biêất môi trậ ường chung quanh, cùng v i nh ng thành t u to l nớ
ữ ự ớ trong lĩnh v c Tin h c - Đi n tự ọ ệ ử đã t o ra các thêấ h robot v i nhiêều tính
năngạ ệ ớ đăc bi t, Sôấ lệ ượng robot ngày càng gia tăng, giá thành ngày càng gi
m. Nh v y,ả ờ ậ robot công nghi p đã có v trí quan tr ng trong các dấy chuyêền s n
xuấất hi nệ ị ọ ả ệ đ i.ạ
M t vài sôấ li u vêề sôấ lộ ệ ượng robot được s n xuấất ả ở m t vài nộ ước
công nghi p phát tri n nh sau:ệ ể ư
Page | 5 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI Năm Năm Năm N
c SX 1990 1994 1998 Nht 66.118 29.756 67000 My 4.237 7.634 11000 ẫ Đc 5.845 5.125 8.600 Ý 2.500 2.408 4000 Pháp 1.448 1.197 2000 Anh 510 1086 1500 Hàn Quôấc 1000 1200
Myẫ là nước đấều tiên phát minh ra Robot nh ng nư ước phát tri n cao nhấất
ể trong lĩnh v c nghiên c u chêấ t o s d ng l i là Nh t B n. ự ứ ạ ử ụ ạ ậ ả
1.2. ỨNG DỤNG ROBOT CÔNG NGHIỆP TRONG SẢN XUẦẤT:
Từ khi m i ra đ i robot công nghi p đớ ờ ệ ược áp d ng trong nhiêều lĩnh v
cụ ự dưới góc đ thay thêấ s c ngộ ứ ười. Nh v y các dấy chuyêền s n xuấất đờ ậ ả
ược t ch cổ ứ l i, năng suấất và hi u qu s n xuấất tăng lên rõ r t.ạ ệ ả ả ệ
M c tiêu ụ ứng d ng robot công nghi p nhăềm góp phấền nấng cao năngụ ệ
suấất dấy chuyêền công ngh , gi m giá thành, nấng cao chấất lệ ả ượng và kh năngả
c nh tranh c a s n ph m đôềng th i c i thi n điêều ki n lao đ ng. Đ t đạ ủ ả ẩ ờ ả ệ ệ ộ
ạ ược các m c tiêu trên là nh vào nh ng kh năng to l n c a robot nh : làm vi c khôngụ
ờ ữ ả ớ ủ ư ệ biêất m t m i, rấất dêẫ dàng chuy n nghêề m t cách thành thệ ỏ ể ộ ạo,
ch u đị ược phóng x và các môi trạ ường làm vi c đ c h i, nhi t đệ ộ ạ ệ ộ cao, “c m
thấấy” đả ược c tả ừ trường và “nghe” được c siêu ấm . . Robot đả ược dùng thay
thêấ con người trong các trường h p trên ho c th c hi n các công vi c tuy không n
ng nh c nh ngợ ặ ự ệ ệ ặ ọ ư đ n đi u, dêẫ gấy m t mõi, nhấềm lấnẫ .ơ ệ ệ
Trong ngành cơ khí, robot được sử ụ d ng nhiêều trong công nghệ đúc, công
ngh hàn, căất kim lo i, s n, phun phệ ạ ơ ủ kim lo i, tháo lăấp v n chuy n phôi,ạ ậ ể
lăấp ráp s n ph m . . .ả ẩ
Page | 6 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
Ngày nay đã xuấất hi n nhiêều dấy chuyêền s n xuấất tệ ả ự ộ đ ng gôềm
các máy CNC v i Robot công nghi p, các dấy chuyêền đó đ t m c t đ ng hoá cao, m c
đớ ệ ạ ứ ự ộ ứ ộ linh ho t cao . . . ạ ở đấy các máy và robot được điêều khi n bể ănề
g cùng m t hộ ệ thôấng chương trình.
Ngoài các phấn xưởng, nhà máy, kyẫ thu t robot cũng đậ ược sử ụ d ng
trong vi c khai thác thêềm l c đ a và đ i dệ ụ ị ạ ương, trong y h c, s dọ ử ụng trong
quôấc phòng, trong chinh ph c vũ tr , trong công nghi p nguyên t , trong các lĩnh v
cụ ụ ệ ử ự xã h i . . .ộ
Rõ ràng là kh năng làm vi c c a robot trong m t sôấ điêều kiả ệ ủ ộ ện vượt
h nơ khả năng c a con ngủ ười; do đó nó là phương ti n h u hi u đệ ữ ệ ể ự ộ t đ ng
hoá, nấng cao năng suấất lao đ ng, gi m nh cho con ngộ ả ẹ ười nh ng công vi c n
ngữ ệ ặ nh c và đ c h i. Nhọ ộ ạ ược đi m l n nhấất c a robot là ch a linh ho t nhể ớ
ủ ư ạ ư con người, trong dấy chuyêền tự ộ đ ng, nêấu có m t robot b h ng có thộ ị ỏ
ể làm ng ngừ ho t đ ng c a c dấy chuyêền, cho nên robot vấẫn luôn ho t đ ng dạ ộ ủ
ả ạ ộ ướ ựi s giám sát c a con ngủ ười.
1.3. CÁC KHÁI NIỆM VÀ Đ NH NGHĨA VỀỀ ROBOT CÔNG NGHIỊỆP:
1.3.1. Đ nh nghĩa robot công nghi p:ị ệ
Đ nh nghĩa theo tiêu chu n AFNOR (Pháp):ị ẩ
Robot công nghi p là m t c cấấu chuy n đ ng t đ ng có th l p trình,ệ ộ ơ ể ộ ự
ộ ể ậ l p l i các chặ ạ ương trình, t ng h p các chổ ợ ương trình đ t ra trên các tr c to
đ ;ặ ụ ạ ộ có kh năng đ nh v , đ nh hả ị ị ị ướng, di chuy n các đôấi tể ượng v t chấất:
chi tiêất, daoậ c , gá lăấp . . . theo nh ng hành trình thay đ i đã chụ ữ ổ ương trình
hoá nhăềm th cự hi n các nhi m v công ngh khác nhau.ệ ệ ụ ệ
Đ nh nghĩa theo RIA (Robot institute of America):ị
Robot là m t tay máy v n năng có thộ ạ ể ặ l p l i các chạ ương trình được
thiêất kêấ để di chuy n v t li u, chi tiêất, d ng cể ậ ệ ụ ụ ho c các thiêất b chuyên
dùngặ ị thông qua các chương trình chuy n đ ng có thể ộ ể thay đ i đổ ể hoàn thành
các nhi m v khác nhau.ệ ụ
Đ nh nghĩa theo GOCT 25686-85 (Nga):ị
Robot công nghi p là m t máy tệ ộ ự ộ đ ng, được đ t côấ đ nh ho c di đ ngặ
ị ặ ộ được, liên kêất gi a m t tay máy và m t h thônấ g điêều khi n ữ ộ ộ ệ ể theo
chương trình, có th l p trình l i đ hoàn thành các ch c năng v n đ ng và điêều khi n
trongể ậ ạ ể ứ ậ ộ ể quá trình s n xuấất.ả
Page | 7 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
Có thể nói Robot công nghi p là m t máy tệ ộ ự ộ đ ng linh ho t thay thêấạ t
ng phấền ho c toàn bừ ặ ộ các ho t đ ng cạ ộ ơ băấp và ho t đ ng trí tuạ ộ ệ ủ c a con
người trong nhiêều kh năng thích nghi khác nhau.ả
Robot công nghi p có kh năng chệ ả ương trình hoá linh ho t trên nhiêềuạ
tr c chuy n đ ng, bi u th cho sôấ b c t do c a chúng. Robot công nghi p đụ ể ộ ể ị ậ ự
ủ ệ ược trang b nh ng bàn tay máy ho c các c cấấu chấấp hành, gi i quyêất nh ng
nhi mị ữ ặ ơ ả ữ ệ vụ xác đ nh trong các quá trình công ngh : ho c tr c tiêấp tham
gia th c hi nị ệ ặ ự ự ệ các nguyên công (s n, hàn, phun ph , rót kim lo i vào khuôn
đúc, lăấp rápơ ủ ạ máy . . .) ho c ph c vặ ụ ụ các quá trình công ngh (tháo lăấp chi
tiêất gia công, daoệ c , đôề gá . . .) v i nh ng thao tác cấềm nămấụ ớ ữ , v n chuy n
và trậ ể ao đ i các đôấi tổ ượng v i các tr m công ngh , trong m t h thôấng máy t đ
ng linh ho t, đớ ạ ệ ộ ệ ự ộ ạ ược g i làọ “H thôấng tệ ự ộ đ ng linh ho t robot hoá”
cho phép thích ạ ứng nhanh và thao tác đ n gi n khi nhi m v s n xuấất thay đ i.ơ ả ệ ụ ả ổ
1.3.2. B c t do c a robot (DOF: Degrees Of Freedom):ậ ự ủ
B c tậ ự do là sôấ kh năng chuy n đ ng c a m t c cấấu (chuy n đả ể ộ ủ ộ ơ ể
ộng quay ho c t nh tiêấn). Đ d ch chuy n đặ ị ể ị ể ược m t v t th trong không gian, c
cấấuộ ậ ể ơ chấấp hành c a robot ph i đ t đủ ả ạ ược m t sôấ b c t do. Nói chung c h
c a robotộ ậ ự ơ ệ ủ là m t c cấấu h , do đó b c t do c a nó có th tính theo công th c:ộ
ơ ở ậ ự ủ ể ứ
Ở đấy: n - Sôấ khấu đ ng;ộ
pi - Sôấ kh p lo i i (i = 1, 2,. .,5 : Sôấ b c t do b h n chêấ).ớ ạ ậ ự ị ạ
Đôấi v i các c cấấu có các khấu đớ ơ ược nôấi v i nhau bănề g kh pớ ớ
quay ho cặ t nh tiêấn (kh p đ ng lo i 5) thì sôấ b c tị ớ ộ ạ ậ ự do bănề g v i sôấớ khấu
đ ng.. Đôấi v i cộ ớ ơ cấấu h , sôấ b c t do băềng t ng sôấ b c t do c a các kh p đ ng.ở
ậ ự ổ ậ ự ủ ớ ộ
Để ị đ nh v và đ nh hị
ị ướng khấu chấấp hành cuôấi
m t cách tuỳ ý trongộ
không gian 3 chiêều robot cấền có 6 b c t do, trong đó 3 b c t do đ đ nh v và 3ậ ự ậ
ự ể ị ị b c tậ ự do đ đ nh hể ị ướng. M t sôấ công vi c đ n gi n nấng h , săấp xêấp.. có
thộ ệ ơ ả ạ ể yêu cấuề sôấ b c tậ ự do ít h n. Các robot hàn, s n.. thơ ơ ường yêu
cấuề 6 b c tậ ự do. Trong m t sôấ trộ ường h p cấnề s khéo léo, linh ho t ho c khi
Page | 8 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
cấền phợ ự ạ ặ ải tôấi u hoáư quyẫ đ o. . ngạ ười ta dùng robot v i sôấ b c t do l n h
n 6.ớ ậ ự ớ ơ
1.3.3. H to đ (Coordinate frames):ệ ạ ộ
Môẫi robot thường bao gôềm nhiêều khấu (links) liên kêất v i nhau qua
cácớ kh p (joints), t o thành m t xích đ ng h c xuấất phát t m t khấu c b n (base)ớ ạ
ộ ộ ọ ừ ộ ơ ả đ ng yên. H to đ găấn v i khấu c b n g i là h to đ c b n (hay h toứ ệ ạ ộ
ớ ơ ả ọ ệ ạ ộ ơ ả ệ ạ đ chu n). Các h to đ trung gian khác găấn v i các khấu đ ng g i
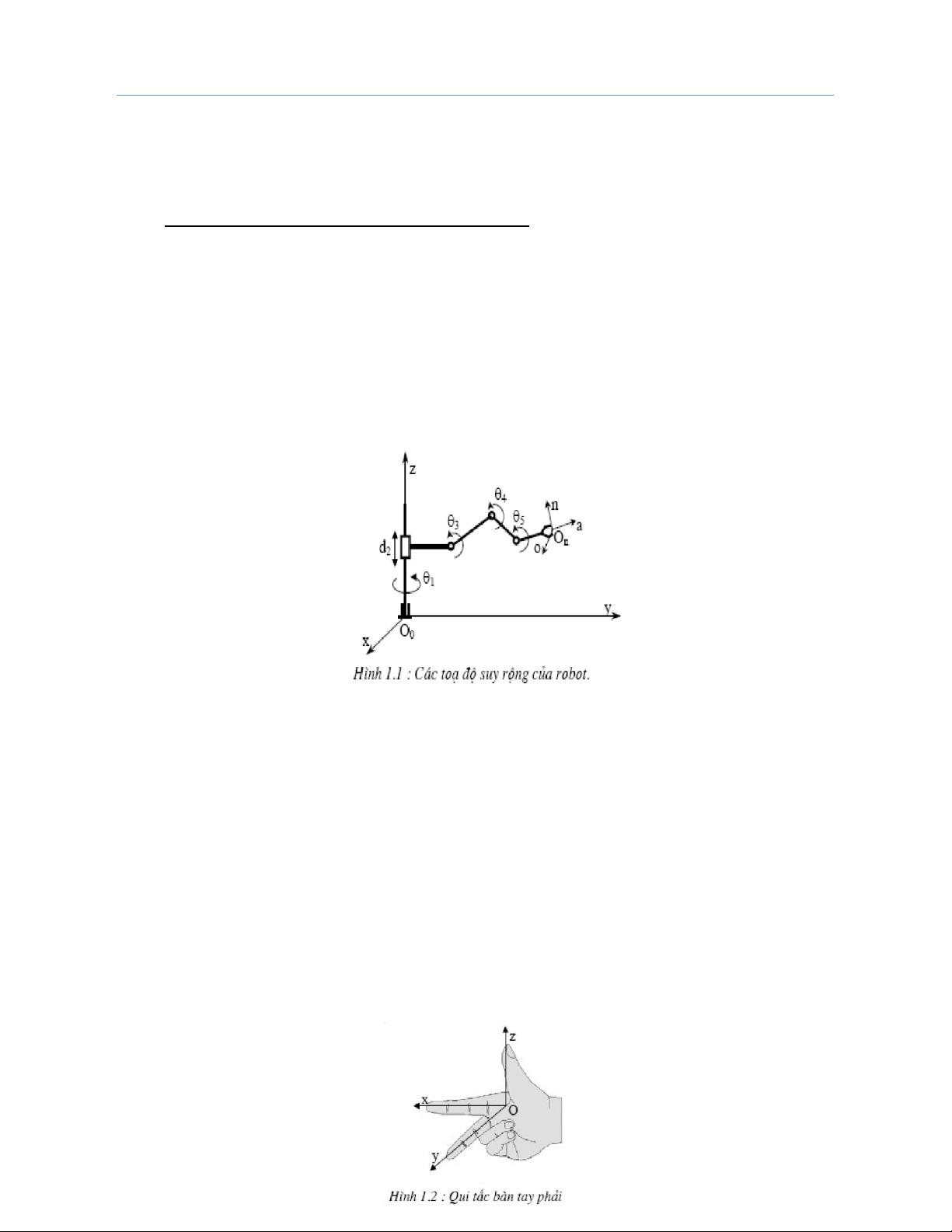
là h toộ ẩ ệ ạ ộ ớ ộ ọ ệ ạ đ suy r ng. Trong t ng th i đi m ho t đ ng, các to đ suy r nộ
ộ ừ ờ ể ạ ộ ạ ộ ộ g xác đ nh cấuấị hình c a robot bănề g các chuy n d ch dài ho c các
chuy n d ch góủ ể ị ặ ể ị c c a các kh pủ ớ t nh tiêấn ho c kh p quay. Các to đ suy r ng
còn đị ặ ớ ạ ộ ộ ược g i là biêấn kh p (Hìnhọ ớ 1.1)
Các h to đ găấn trên các khấu c a robot ph i tuấn theo qui tăấc bàn tayệ ạ ộ ủ
ả ph i: Dùng tay ph i, năấm hai ngón tay út và áp út vào lòng bàn tay, xoè 3 ngón :ả
ả cái, tr và gi a theo 3 phỏ ữ
ương vuông góc nhau,
nêấu ch n ngón cái là phọ
ương và chiêều c a tr c z, thì ngón tr ch phủ ụ ỏ ỉ
ương, chiêều c a tr c x và ngón gi a seẫ bi uủ ụ ữ ể th
phị ương, chiêều c a tr c y (hình 1.2).ủ ụ
Trong robot ta thường dùng ch O và ch sôấ n đ ch h to đ găấn trênữ ỉ ể ỉ ệ
ạ ộ khấu th n. Nh v y h to đ c b n (H to đ găấn v i khấu côấ đ nh) seẫ đứ ư ậ ệ ạ ộ ơ
ả ệ ạ ộ ớ ị ược ký hi u là Oệ 0; h to đ găấn trên các khấu trung gian tệ ạ ộ ương ứng seẫ là O1, O2,...,
On-1, H to đ găấn trên khấu chấấp hành cuôấi ký hi u là On.ệ ạ ộ ệ
Page | 9 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
1.3.4. Trường công tác c a robot (Workspace or Range of motion):ủ
Trường công tác (hay vùng làm vi c, không gian công tác) cệ ủa robot là
toàn b th tích độ ể ược quét b i khấu chấấp hành cuôấi khi robot th c hi n tấất cở
ự ệ ả các chuy n đ ng có th . Trể ộ ể ường công tác b ràng bu c b i các thông sôấ
hình h cị ộ ở ọ c a robot cũng nh các ràng bu c c h c c a các kh p; ví d , mủ ư ộ ơ ọ ủ
ớ ụ ột kh p quay cóớ chuy n đ ng nh h n m t góc 360ể ộ ỏ ơ ộ 0. Người ta thường
dùng hai hình chiêấu để mô t trả ường công tác c a m t robot (hình 1.3).ủ ộ
1.4. CẦẤU TRÚC CƠ Ả BN CỦA ROBOT CÔNG NGHIỆP:
1.4.1. Các thành phấền chính c a robot công nghi p:ủ ệ
M t robot công nghi p thộ ệ
ường bao gôềm các
thành phấền chính như :
cánh tay robot, nguônề đ ng l c, d ng cộ ự ụ ụ găấn lên khấu chấấp hành cuôấi, các
c mả biêấn, b điêều khi n , thiêất b d y h c, máy tính . . các phấền mêềm l p trình
cũngộ ể ị ạ ọ ậ nên được coi là m t thành phấền c a h thôấng robot.ộ ủ ệ
Cánh tay robot (tay máy) là kêất cấuấ c khí gômềơ các khấu liên kêất v i
nhauớ băềng các kh p đ ng đ có th t o nên nh ng chuy n đ ng c b n c a robot.ớ ộ ể ể
ạ ữ ể ộ ơ ả ủ
Nguôền đ ng l c là các đ ng c đi n (m t chiêều ho c đ ng c bộ ự ộ ơ ệ ộ ặ ộ ơ
ước), các h thôấng xy lanh khí nén, thu l c đ t o đ ng l c cho tay máy ho t đ ng.ệ ỷ ự
ể ạ ộ ự ạ ộ
D ng c thao tác đụ ụ ược găấn trên khấu cuôấi c a robot, d ng c c a robotủ
ụ ụ ủ có th có nhiêều ki u khác nhau nh : d ng bàn tay đ năấm băất đôấi tể ể ư ạ ể
ượng ho cặ các công c làm vi c nh m hàn, đá mài, đấều phun s n.. ụ ệ ư ỏ ơ
Page | 10 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
Thiêất b d y-hoc (Teach-Pendant) dùng đị ạ ể ạ d y cho robot các thao tác
cấền thiêất theo yêu cấều c a quá trình làm vi c, sau đó robot tủ ệ ự ặ l p l i các đ
ngạ ộ tác đã được d y đ làm vi c (phạ ể ệ ương pháp l p trình ki u d y h c).ậ ể ạ ọ
Các phấền mêềm đ l p trình và các chể ậ ương trình điêều khi n robot để
ược cài đ t trên máy tính, dùng điêều khi n robot thông qua bặ ể ộ điêều khi nể
(Controller). B điêều khi n còn độ ể ược g i là Mođun điêều khi n (hay Unit, Driver),ọ
ể nó thường được kêất nôấi v i máy tính. M t mođun điêều khi n có th còn có cácớ
ộ ể ể c ng Vào - Ra (I/O port) đ làm vi c v i nhiêều thiêất b khác nhau nhổ ể ệ ớ ị ư
các c mả biêấn giúp robot nh n biêất tr ng thái c a b n thấn, xác đ nh vậ ạ ủ ả ị ị trí
c a đôấi tủ ượng làm vi c ho c các dò tìm khác; điêều khi n các băng t i ho c cệ ặ ể ả
ặ ơ cấấu cấấp phôi ho t đ ng phôấi h p v i robot. .ạ ộ ợ ớ
1.4.2. Kêất cấấu c a tay máy:ủ
Như đã nói trên, tay máy là thành phấền quan tr ng, nó quyêất đ nh kh năngọ ị
ả làm vi c c a robot. Các kêất cấấu c a nhiêều tay máy đệ ủ ủ ược ph ng theo cấấu t
o vàỏ ạ ch c năng c a tay ngứ ủ ười; tuy nhiên ngày nay, tay máy được thiêất kêấ
rấất đa d ng,ạ nhiêều cánh tay robot có hình dáng rấất khác xa cánh tay người.
Trong thiêất kêấ và sử ụ d ng tay máy, chúng ta cấền quan tấm đêấn các thông sôấ
hình - đ ng h c, làộ ọ nh ng thông sôấ liên quan đêấn kh năng làm vi c c a robot nh
Page | 11 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
: tấềm v i (hayữ ả ệ ủ ư ớ trường công tác), sôấ b c tậ ự do (thể hi n sệ ự khéo léo
linh ho t c a robot), đạ ủ ộ c ng v ng, t i tr ng v t nấng, l c k p . . .ứ ữ ả ọ ậ ự ẹ
Các khấu c a robot thủ ường th c hi n hai chuy n đ ng c b n:ự ệ ể ộ ơ ả
• Chuy n đ ng t nh tiêấn theo hể ộ ị ướng x, y, z trong không gian Descarde,
thông thường t o nên các hình khôấiạ
• Chuy n đ ng xoay theo các tr c x, y, z trong không gian. ể ộ ụ
• Các chuy n đ ng này thể ộ ường ký hi u là T (Translation) ho c Pệ ặ (Prismatic).
1.5. PHẦN LOẠI ROBOT CÔNG NGHIỆP:
Robot công nghi p rấất phong phú đa d ng, có th đệ ạ ể ược phấn lo i theo cácạ cách sau:
1.5.1. Phấn lo i theo kêất cấấu:ạ
Theo kêất cấấu c a tay máy ngủ ười ta phấn thành robot ki u to đ Đêề các, ể
ạ ộ Ki u to đ tr , ki u to đ cấều, ki u to đ góc, robot ki u SCARA nh đã ể ạ ộ ụ ể ạ ộ ể ạ ộ ể
ư trình bày trên.ở
1.5.2. Phấn lo i theo h thônấ g truyêền đ ng: ạ ệ ộ
Có các d ng truyêền đ ng ph biêấn là:ạ ộ ổ
- H truyêền đ ng đi n: Thệ ộ ệ ường dùng các đ ng c đi n 1 chiêều (DC: Direct ộ ơ ệ
Current) ho c các đ ng c bặ ộ ơ ước (step motor). Lo i truyêền đ ng nấềy dêẫ điêều
ạ ộ khi n, kêất cấấu g n.ể ọ
- H truyêền đ ng thu l c: có th đ t đệ ộ ỷ ự ể ạ ược công suấất cao, đáp ứng nh ng ữ
điêều ki n làm vi c n ng. Tuy nhiên h thôấng thu l c thệ ệ ặ ệ ỷ ự ường có kêất
cấấu côềng kêềnh, tôền t i đ phi tuyêấn l n khó x lý khi điêều khi n.ạ ộ ớ ử ể
- H truyêền đ ng khí nén: có kêất cấấu g n nhệ ộ ọ ẹ ơ h n do không cấền dấẫn
ngược nh ng l i ph i găấn liêền v i trung tấm t o ra khí nén. H nấềy làm vi c v i ư
ạ ả ớ ạ ệ ệ ớ công suấất trung bình và nh , kém chính xác, thỏ ường ch thích h p
v i các ỉ ợ ớ robot ho t ạ đ ng theo chộ ương trình đ nh s n v i các thao tác đ n gi
n ị ẳ ớ ơ ả “nhấấc lên - đ t ặ xuôấng” (Pick and Place or PTP: Point To Point).
1.5.3. Phấn lo i theo ng d ng:ạ ứ ụ
- D a vào ng d ng c a robot trong s n xuấất có Robot s n, robot hàn, robot ự ứ ụ ủ ả
ơ lăấp ráp, robot chuy n phôi .v.v. .ể
Page | 12 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
1.5.4. Phấn lo i theo cách th c và đ c tr ng c a phạ ứ ặ ư ủ
ương pháp điêều khi n:ể
- Có robot điêều khi n h (m ch điêều khi n không có các quan h ph n hôềi), ể ở ạ ể
ệ ả Robot điêều khi n kín (hay điêều khi n servo): sể ể ử ụ d ng c m biêấn, m ch ph
n ả ạ ả hôềi đ tăng đ chính xác và m c đ linh ho t khi điêều khi n.ể ộ ứ ộ ạ ể
CHƯƠNG II: THIỀẾT KỀẾ CƠ CẦẾU ROBOT
2.1. XẦY DỰNG CẦẤU TRÚC, THIỀẤT LẬP HỆ PHƯƠNG TRÌNH ĐỘNG HỌ ỦC C A ROBOT:
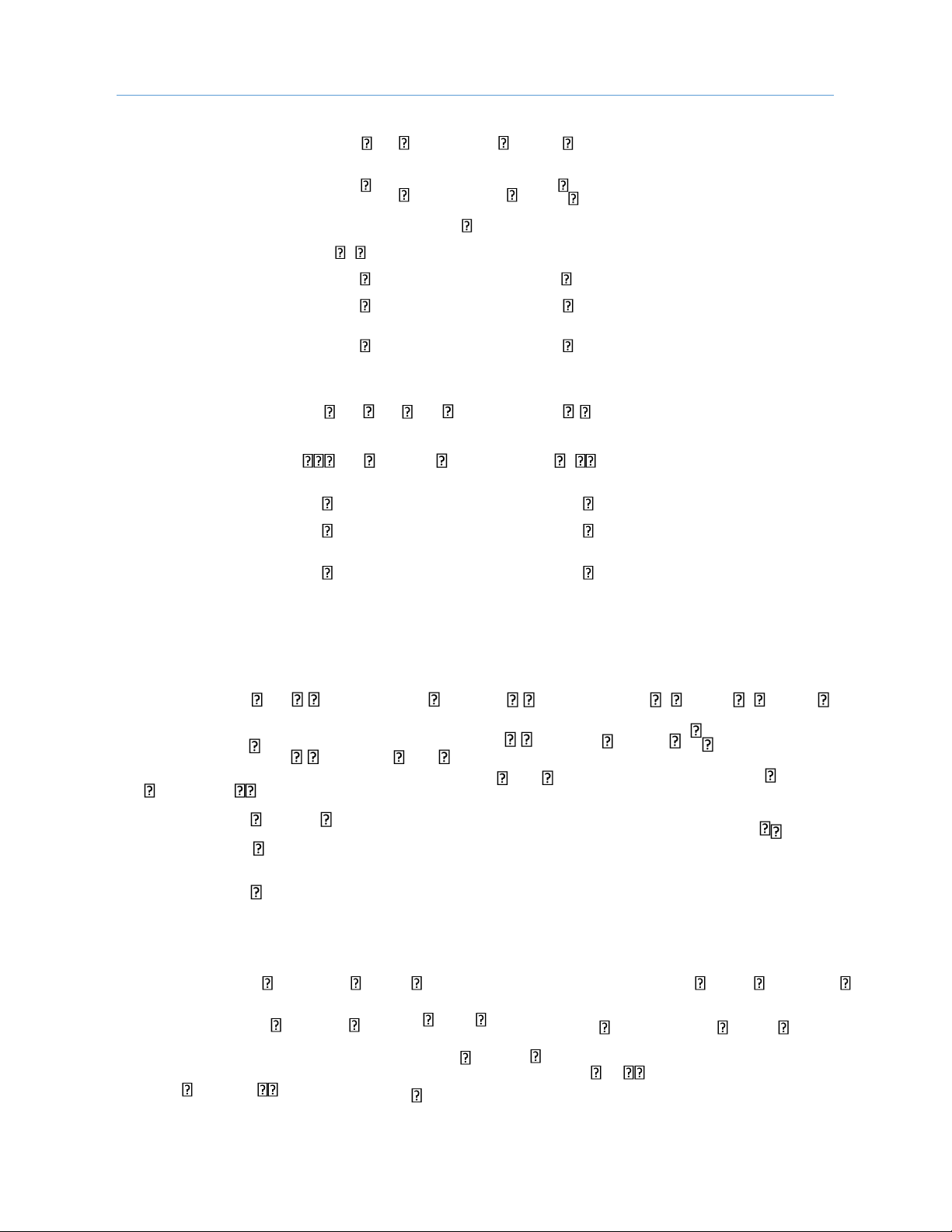
2.1.1. Cấấu trúc c a ROBOT RRR:ủ
2.1.2. Xấy d ng h t a đ DHự ệ ọ ộ
: Denavit – Hartenberg (1955) đã quy
ước h t a đ ệ ọ
ộ Decard găấn vào môẫi khấu c a m t tay máy Robot nh sau:ủ ộ ư
Page | 13 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
* Tr c ụ được ch n d c theo tr c c a kh p th (i+1). ọ ọ ụ ủ ớ ứ
Hướng c a phép quay và phép t nh tiêấn đủ ị
ược ch n tùy ý.ọ
* Tr c đụ ược xác đ nh d c theo đị ọ ường vuông góc chung gi a tr c kh p đ ng th ữ ụ ớ
ộ ứ i và (i+ 1), hướng t kh p đ ng th i t i tr c ( i+1).ừ ớ ộ ứ ớ ụ * Tr c đụ
ược xác đ nh theo quy tăấc bàn tay ph i. ị ả
T quy tăấc trên ta xấy d ng các t a đ kh o sát (Hình 2.1).ừ ự ọ ộ ả
H t a đ :ệ ọ ộ
Gôấc t a đ đ t t i tấm c a kh p đ ng th nhấấtọ ộ ặ ạ ủ ớ ộ ứ Tr c d c theo hụ
ọướng c a tr c kh p đ ng th nhấất hủ ụ ớ ộ
ứướng t trong ra ừ ngoài.
Tr c có phụương vuông góc v i .ớ
Tr c xác đ nh theo quy tăấc bàn tay ph i. ụ ị ả • H t a đ :ệ ọ ộ
Gôấc t a đ đ t t i tấm c a kh p đ ng th 2ọộ ặ ạ ủ ớ ộ ứ
Tr c ụ có phương d c theo tr c kh p đ ng xoay th 2 nh hình veẫ.ọ ụ ớ ộ ứ ư
Tr c có phụ ương năềm trên đường vuông góc chung c a tr c và .ủ
ụ Tr c ụ xác đ nh theo quy tăấc bàn tay ph i.ị ả • H t a đ :ệ ọ ộ
Gôấc t a đ đ t t i tấm c a kh p đ ng th 3.ọ ộ ặ ạ ủ ớ ộ ứ
Tr c ụ có phương d c theo tr c kh p đ ng xoay th 3 c a kh p xoay.ọ ụ ớ ộ ứ ủ ớ
Tr c có phụ ương năềm trên đường vuông góc chung c a tr c và .ủ
ụ Tr c xác đ nh theo quy tăấc bàn tay ph i.ụ ị ả • H t a đ :ệ ọ ộ
Gôấc t a đ đ t t i đi m cuôấi c a khấu thao tác.ọ ộ ặ ạ ể ủ
Page | 14 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
Tr c ch n phụ ọ ương d c theo họ ướng tác đ ng, chiêều tùy ý. Hình
veẫ.ộ Tr c vuông góc v i ụ ớ . Và song song v i ớ tr c ụ .
Tr c xác đ nh theo quy tăấc bàn tay ph i. ụ ị ả
2.1.3. Xác đ nh các tham sôấ đ ng h c D-Hịộ ọ :
V trí c a h t a đ kh p đôấi v i h t a đ kh p đị ủ ệ ọ ộ ớ ớ ệ ọ ộ ớ
ược xác đ nh b i 4 tham sôấ , , , ị ở nh sau:ư
: Góc quay quanh tr c đ tr c trùng v i tr c ().ụ ể ụ ớ ụ
: D ch chuy n t nh tiêấn d c tr c đ gôấc t a đ chuy đêấn là giao đi m ị ể ị ọ ụ ể ọ ộ ể ể
c a ủ tr c ụ và tr c ụ .
: D ch chuy n d c tr c đ đi m chuy n đêấn đi m ị ể ọ ụ ể ể ể ể .
: Góc quay quanh tr c sao cho tr c () trùng v i tr c ụ ụ ớ ụ .
2.1.4. L p b ng Denavit – Hartenbergậ ả : Khấu d i θ i a i α i 1 0 1 a 1 π/2 2 d 2 2 0 π/2 3 0 3 a3 0
Thông sôấ tính toán và thiêất kêấ:
• Khấu 1: a1= 500 (mm)
• Khấu 2: d2= 400 (mm)
• Khấu 3: a3= 300 (mm)
2.1.5. Tính toán các ma tr n truyêềnậ Denavit – Hartenberg:
Page | 15 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI
M c tiêu c a bài toán đ ng h c thu n là tính toán v trí và hụ ủ ộ ọ ậ ị
ướng c a khấu thao ủ tác dưới d ng hàm c a các biêấn kh p.ạ ủ ớ
X = f (q) Trong đó: + T a đ Xọ
ộ = [x1, x2, x3]T là v trí bàn k p trong h t a đ côấ đ nh. T p h p các vector Xị ẹ ệ ọ ộ ị ậ
ợ trong không gian g i là không gian thao tác c a robot.ọ ủ
+ Và q = [q1, q2, q3]. Ở đấy q1 = 1, q2 = 2, q3 = 3 (chính là các biêấn kh p xoay). Là vect ớ ơ t
a đ suy r ng c a các biêấn kh p. T p các vect qọ ộ ộ ủ ớ ậ ơ xác đ nh nên không gian kh p
hayị ớ còn g i là không gian cấuấ hình c a c a robot.ọ ủ ủ
- Ta seẫ tìm hướng và v trí c a bàn k p robot t ma tr n biêấn đ i thuấền nhấất Aị ủ ẹ ừ ậ ổ E.
- D ng t ng quát c a ma tr n Denavit-Hartenberg cho các khấu:ạ ổ ủ ậ cosθ i sinθ sinα a cosθ sinθ cosαi i i i i i
sinθ i cosθ cosαi i sinα cosθi i i 1 A a sinθi i i d i 0 sinα i cosα 1 i 0 0 0
- Ma tr n Denavit-Hartenberg cho khấu 1:ậ cos 1 0 (1) sin 1 a1.cos 1 sin 1 0 cos 1 a1.sin 1 0 A1 0 1 0 0 0 0 0 1
- Ma tr n Denavit-Hartenberg cho khấu 2:ậ
Page | 16 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI cos 2 0 0 (2) sin 2 sin 2 0 0 cos 2 1A2 0 1 0 d2 0 0 0 1
- Ma tr n Denavit-Hartenberg cho khấu 3:ậ cos 3 0 sin 3 a3.cos 3 2 A3 sin 3 cos 3 0 a3.sin 3 (3) 0 0 1 0 0 0 0 1
* T (1), (2), ta xác đ nh đừ ị
ược ma tr n biêấn đ i t a đ thuấền nhấất c a khấu 2 so v i ậ ổ ọ ộ ủ ớ
tr c ụ h t a đ côấ đ nh ệ ọ ộ ị là: cos 1.cos 2 sin cos d 1 1.sin 2
2.sin 1 a1.cos 1 a1.sin 1 sin 1.sin 2 d2.cos 1 sin 1.cos 2 cos 1 cos 0 2 0 A2 0 A A1.1 2 (4) 0 sin 2 0 1 0 0
* T (4) & (3) ta xác đ nh ma tr n mô t v trí và hừ ị ậ ả ị ướng c a khấu
thao tác trong hủ ệ t a đ côấ đ nh ọ ộ ị là: CC C1 2 3 S S1 CC S1 2 3
CS12 a CC C3 ( 1 2 3 S S1 3) aC d S1 1 SC SS 3 SC C1 2 3 CS1 1 3 SC 1 2
2 1 a SC C3( 1 2 3 CS1 3) aS d C1 3
S1 2 3 CC1 3 C2 1 2 1 (5)
0 A q3( ) 0 A A2.23 S S 0 2 3
Page | 17 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI S C2 3 0 a S C3 2 3 0 1
V i quy ớ ước Ci = cosθi , Si = sinθi, i=1÷3.
2.1.6. Thiêất l p h phậ
ệương trình đ ng h c c a ROBOT:ộ ọ ủ A
- Ma tr n ậ 0 3 cho ta biêất hướng và v trí c a khấu thao tác trong h t a đ côấ đ nh ị ủ
ệ ọ ộ ị hay nói cách khác là v trí c a đi m tác đ ng cuôấi và hị ủ ể ộ ướng c a ủ h t a đ
đ ng gănấ ệ ọ ộ ộ vào khấu t i đi m tác đ ng cuôấi trong h t a đ côấ đ nh. Vì thêấ nó
còn đạ ể ộ ệ ọ ộ ị ược bi u ể diêẫn qua thông sôấ các biêấn kh p ta t m g i là ớ ạ ọ qi.
Trong bài toán c th thì nó là các ụ ể kh p xoay ớ θi, v i i=1÷3.ớ
- Khi đó, ma tr n 5 đậ
ược kí hi u thành:ệ 0 A3 ( )q . - x y z
S d ng các góc Cardan xác đ nh hử ụ ị ướng c a v t răấn. Ta g i ủ ậ ọ
E , E , E , ,
, là giá tr mô t tr c tiêấp v trí và hị ả ự ị ướng c a EXủ 3Y3Z3 so v i h t a đ Oớ ệ ọ ộ 0Z0Y0Z0. Trong đó:
xE, yE,zE là các t a đ đi m E và là các góc quay Cardan c a EXọ ộ ể ủ 3Y3Z3 so v i h t aớ
ệ ọ đ Oộ 0Z0Y0Z0. Do các t a đ thao tác đêều là hàm c a th i gian. Nên ta có th bi u diêẫn: ọ ộ ủ ờ ể ể
Page | 18 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI 1 0 A tn ( )
0R tnT( ) 0r tE ( ) (6) 0 V i: A
ớ 0 E là ma tr n Cardan mô ta hậ ướng EX3Y3Z3 so v i h t a đ Oớ ệ ọ ộ 0Z0Y0Z0. r
0 E là vect mô t v trí c a đi m tác đ ng cuôấi trong h t a đ Oơả ị ủ ể ộ ệ ọ ộ 0Z0Y0Z0. 0 r tE( )
xE(t), yE(t), zE( )t T (7) cos cos cos sin sin (8) 0Rn RCD sinsin cos cos sin sin sin sin cos cos sin cos cos sin cos sin sincos sin sin sin coscos cos A ( )q 0 3
bi u diêẫn v trí và hể
ị ướng c a khấu thao tác trong h t a đ ủ ệ ọ ộ -
Do ma tr n ậ côấ đ nh thông qua biêấn kh p qị ớ
i (Ma tr n tr ng thái khấu
thao tác theo cấấu trúc đ ng ậ ạ ộ A t ( ) 0 E
cũng mô t v trí và hả ị ướng c a khấu thao tác thông qua h
ủ ệ h c. Còn ma tr n ọ
ậ t a đ khấu thao tác. ọ ộ Ở đấy ta ch n cách bi u diêẫn thông
qua các góc Cardan. ọ ể
0 A q3( ) 0 A tn ( ) . V i n =3 vì c cấuấ ớ ơ
* T đó ta có PT đ ng h c ROBOT có d ng: ừ ộ ọ
ạ ROBOT có 3 khấu. 0
A q3( ) 0 A t3( ) (9)
Page | 19 Lê Tuấấn Anh. CN-CĐT1_K55 lOMoAR cPSD| 49519085
ROBOTICS PGS. PHAN BÙI KHÔI -
T các h th c (5), (6), (7), (8), (9). Ta xấy d ng đừ ệ ứ ự ược h
6 phệ ương trình đ c l p ộ ậ nh ư sau:
f1 0 A q3( )[1,4] 0 A t3( )[1,4] [a C C C3( 1 2
3 S S1 3) a C1 1 d S2 1] xE 0 0 2 A q
3( )[2,4] 0 A t3( )[2,4] [a S C C3( 1 2
3 C S13) a S1 1 d C2 1] yE 0 f
f3 0 A q3( )[3,4] 0 A t3( )[3,4] [a S C3 2 3] zE 0 (10) 0 A q( )[1,1] f4 3
0 A t3( )[1,1] (C C C1 2 3 S S1 3) (cos cos ) 0
f5 0 A q3( )[2,2] 0 A t3( )[2,2] ( S C S1 2 3 C C13) ( sin sin sin cos cos ) 0
f6 0 A q3( )[3,3] 0 A t3( )[3,3] ( C2 ) (cos cos) 0
2.2. TÍNH TOÁN ĐỘNG HỌC THUẬN- NGƯỢC ROBOT:
Page | 20 Lê Tuấấn Anh. CN-CĐT1_K55
Tài liệu liên quan:
-

Quan trị thuong hieu - Bài tập phân tích UNIQLO và đối thủ cạnh tranh
16 8 -

THỰC HÀNH HÓA SINH - Bài Tập và Kết Quả Thí Nghiệm Enzyme
68 34 -

Tài liệu về Chuỗi cung ứng của Tập đoàn cá tra Vĩnh Hoàn môn Quản trị chuỗi cung ứng | Đại học Kinh tế Thành phố Hồ Chí Minh
128 64 -
Tiểu luận về Chuỗi cung ứng của Toyota Việt Nam và các giải pháp hoàn thiện môn Quản trị chuỗi cung ứng | Đại học Kinh tế Thành phố Hồ Chí Minh
99 50 -

Chương 14: Chuỗi cung ứng tinh gọn môn Quản trị chuỗi cung ứng | Đại học Kinh tế Thành phố Hồ Chí Minh
159 80